载货车直角弯道通过性仿真研究
2020-12-23 04:23李慧勇
汽车科技 2020年6期
关键词:数学建模
李慧勇

摘 要:为了提升营运车辆安全性能,有效遏制和减少因车辆主动安全性能不足导致的道路运输事故,中华人民共和国交通运输部于2018年2月26日发布行业标准JT/T 1178.1-2018《营运货车安全技术条件 第1部分:载货汽车》,标准中第4.9项要求:载货汽车在空载状态下按照附录B规定的试验方法进行试验,转弯通道最大宽度应小于等于5.0m。本文以标准中附录B《车辆直角弯道通过性试验方法》为基础,根据汽车转向原理,利用数学建模的方式,研究载货车直角弯道通过性仿真的方法。最后,利用Visual Basic语言设计程序对载货车直角弯道通过性进行仿真,并将仿真结果与试验结果进行比较,结果表明该仿真方法是有效的。
关键词:直角弯道;通过性;载货车;数学建模;迭代计算
中图分类号:U467.1 文献标识码:A 文章编号:1005-2550(2020)06-0046-06
Abstract: In order to improve the safety performance of operating vehicles and effectively curb and reduce road transport accidents caused by Active safety performance of vehicles, the Ministry of transport of the people's Republic of China issued the industry standard JT / T 1178. 1-2018 Technical Conditions for Operating Trucks Safety Part 1: Trucks on February 26, 2018. In which item 4.9 requests: the truck shall be tested in no-load state according to the test method specified in Appendix B, and the maximum width of turning channel shall be less than or equal to 5.0m. On the basis of Appendix B of the standard, Test Method of Passing Through Right Angle Bend of Vehicle, according to the principle of vehicle steering, using the method of mathematical modeling, this paper studies the simulation method of passing through right angle bend of truck. Finally, using Visual Basic programming language to simulate the right angle bend trafficability of the truck, and by comparing the simulation results with the test results, the results show that the simulation method is effective.
Key Words: Right Angle Bend; Trafficability; Truck; Mathematical Modeling; Iterative Calculation
1 背景介绍
近年来,道路货物运输在综合交通运输体系中一直占据着十分重要的位置,在给大家生产生活带来极大便利的同时,也带来了诸多问题,尤其是安全事故频发导致了大量人员伤亡与财产损失。依据《中华人民共和国道路交通事故统计年报》的相关数据,2011年~2016年间共发生死亡3~9人较大级道路交通事故525起,导致死亡2284人、受伤2654人。其中营运货车肇事产生的交通事故354起,导致死亡1513人、受伤1320人,分别占事故总量的67.4%、66.2%和49.7%。按照营运货车车辆类型进行统计,普通货车是肇事车辆的主要车型。由营运货车引发的交通事故极其惨烈,对人民的生命和财产安全造成了极其严重的损失,人们戏称大货车为“大祸车”。
为提升营运车辆安全性能,有效遏制和减少因车辆主动安全性能不足导致的道路运输事故,中华人民共和国交通运输部于2018年2月26日发布行业标准JT/T 1178.1-2018《营运货车安全技术条件 第1部分:载货汽车》,标准对车辆的稳定性、通過性、安全防护性等性能都提出了较高要求,其中第4.9项要求:载货汽车在空载状态下按照附录B规定的试验方法进行试验,转弯通道最大宽度应小于等于5.0m。为了提高车辆本质安全性能、满足新的法规要求,节省研发、试验的费用及时间投入,那么研发初期就必须判断车辆直角弯道通过性,所以建立一套行之有效的载货车直角弯道通过性仿真计算方法十分必要。
2 车辆直角弯道通过性试验方法
JT/T 1178.1-2018《营运货车安全技术条件 第1部分:载货汽车》附录B中规定的试验方法如下:
2.1 试验道路要求
试验路面应为平坦、干燥、整洁的铺装路面。试验规定的路线由三部分组成:直线驶入路段、半径为12.5m的90°圆弧路段以及直线驶出路段,两直线路段分别在与圆弧路段的交点处与圆弧相切,如图1-1所示:
2.2 试验方法
试验操作步骤如下:
(a)车辆空载、以直线状态停于试验路面上。沿车辆最外侧部位向地面做投影,该投影线为试验规定路线中直线驶入路段。
(b)车辆起步,以不超过5km/h的车速由直线行驶过渡到图1-1所述的直角弯道。
(c)转弯结束后,试验车辆应沿直线路段继续行驶一段距离,以保证试验能够测得车辆的转弯通道最大宽度。
(d)在驶入、转弯和驶出过程中应保证车辆前外侧在地面上的参考点与规定路线一致,轨迹偏差不应超过50mm。
(e)记录车辆内侧在地面投影的运动轨迹。上述过程顺逆时针各进行一次。
2.3 试验结果
测量车辆在试验过程中的转弯通道最大宽度,试验结果取顺时针和逆时针两次测试结果的平均值,按GB/T8170修约到小数点后一位,单位为m。
3 车辆直角弯道通过性仿真计算
3.1 车辆转向原理
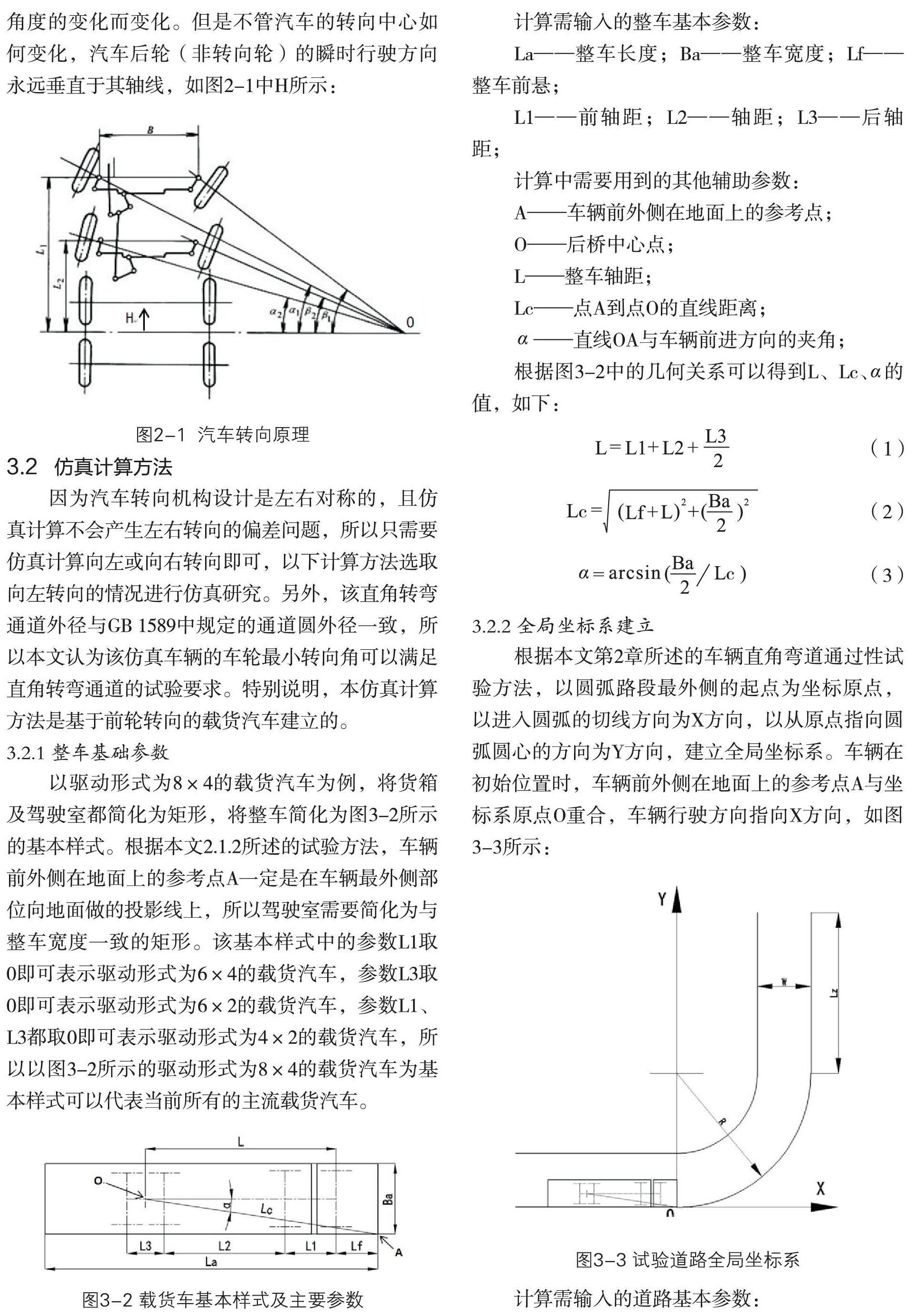
汽车转向机构的设计都是基于阿克曼理论,其核心是汽车转向时所有车轮的轴线都相交于一点,各车轮围绕一个共同的圆心运动,如图2-1所示。这个共同的圆心即汽车的转向中心。汽车的转向中心不是固定不变的,而是随着转向轮偏转角度的变化而变化。但是不管汽车的转向中心如何变化,汽车后轮(非转向轮)的瞬时行驶方向永远垂直于其轴线,如图2-1中H所示:
3.2 仿真计算方法
因为汽车转向机构设计是左右对称的,且仿真计算不会产生左右转向的偏差问题,所以只需要仿真计算向左或向右转向即可,以下计算方法选取向左转向的情况进行仿真研究。另外,该直角转弯通道外径与GB 1589中规定的通道圆外径一致,所以本文认为该仿真车辆的车轮最小转向角可以满足直角转弯通道的试验要求。特别说明,本仿真计算方法是基于前轮转向的载货汽车建立的。
3.2.1 整车基础参数
以驱动形式为8×4的载货汽车为例,将货箱及驾驶室都简化为矩形,将整车简化为图3-2所示的基本样式。根据本文2.1.2所述的试验方法,车辆前外侧在地面上的参考点A一定是在车辆最外侧部位向地面做的投影线上,所以驾驶室需要简化为与整车宽度一致的矩形。该基本样式中的参数L1取0即可表示驱动形式为6×4的载货汽车,参数L3取0即可表示驱动形式为6×2的载货汽车,参数L1、L3都取0即可表示驱动形式为4×2的载货汽车,所以以图3-2所示的驱动形式为8×4的载货汽车为基本样式可以代表当前所有的主流载货汽车。
3.2.2 全局坐标系建立
根据本文第2章所述的车辆直角弯道通过性试验方法,以圆弧路段最外侧的起点为坐标原点,以进入圆弧的切线方向为X方向,以从原点指向圆弧圆心的方向为Y方向,建立全局坐標系。车辆在初始位置时,车辆前外侧在地面上的参考点A与坐标系原点O重合,车辆行驶方向指向X方向,如图3-3所示:
3.2.3 求取参考点的位置
假设车辆在按照本文第2章所述的车辆直角弯道通过性试验方法在全局坐标系中行进,在某一状态时,车辆前外侧在地面上的参考点A的在全局坐标中的坐标为(Xi,Yi)。则根据图3-3中的几何关系可得出以下结果:
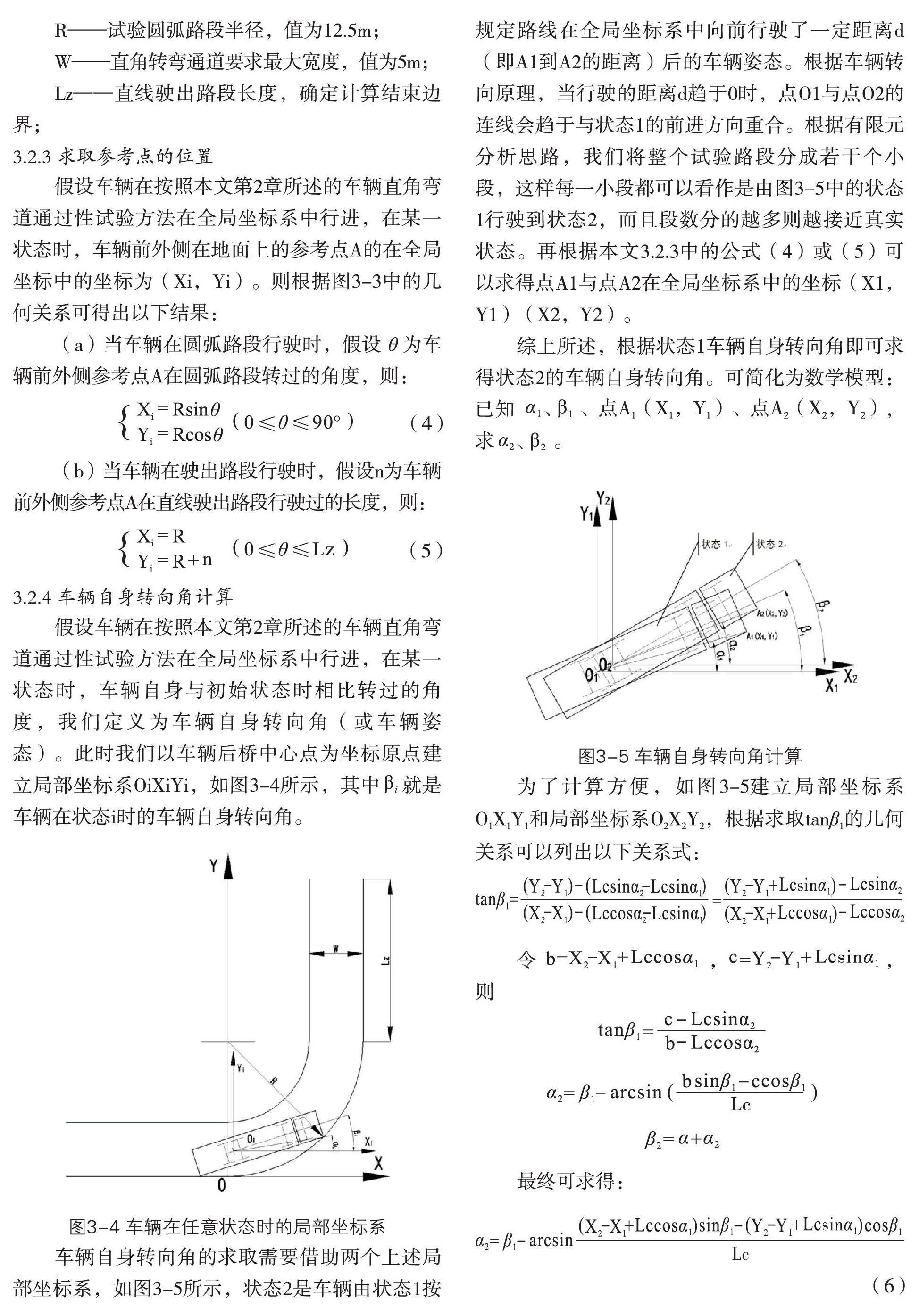
3.2.4 车辆自身转向角计算
假设车辆在按照本文第2章所述的车辆直角弯道通过性试验方法在全局坐标系中行进,在某一状态时,车辆自身与初始状态时相比转过的角度,我们定义为车辆自身转向角(或车辆姿态)。此时我们以车辆后桥中心点为坐标原点建立局部坐标系OiXiYi,如图3-4所示,其中 就是车辆在状态i时的车辆自身转向角。
车辆自身转向角的求取需要借助两个上述局部坐标系,如图3-5所示,状态2是车辆由状态1按规定路线在全局坐标系中向前行驶了一定距离d(即A1到A2的距离)后的车辆姿态。根据车辆转向原理,当行驶的距离d趋于0时,点O1与点O2的连线会趋于与状态1的前进方向重合。根据有限元分析思路,我们将整个试验路段分成若干个小段,这样每一小段都可以看作是由图3-5中的状态1行驶到状态2,而且段数分的越多则越接近真实状态。再根据本文3.2.3中的公式(4)或(5)可以求得点A1与点A2在全局坐标系中的坐标(X1,Y1)(X2,Y2)。
综上所述,我们可以根据初始车辆位置、初始车辆姿态及以上公式逐次迭代计算求得整个仿真试验过程中车辆在全局坐标系中的所有位置及自身转向角(或车辆姿态)。
3.2.5 转弯通道宽度计算
根据上述方法,我们得到了车辆行驶到任意一点时的车辆位置及车辆姿态,然后将车辆行驶到某一状态时的车辆位置及车辆姿态绘制于全局坐标系中,可得到图3-6。根据图3-6中的几何关系即可求得车辆行驶到该点时车辆最内侧与道路最外侧之间的距离,即车辆行驶到该点时的转弯通道宽度Wi。
根据上述公式可求得整个仿真试验过程中车辆在全局坐标系中所有位置的转弯通道宽度,而其中数值最大的一个即是该车辆的转弯通道最大宽度。
4 载货车直角弯道通过性仿真程序
本文第3章所述的仿真计算方法需要大量的迭代计算,采用人工计算工作量巨大,因此利用Visual Basic语言设计了程序进行载货车直角弯道通过性的仿真计算。
4.1 程序简介
根据上述计算方法设计载货车直角弯道通过性仿真程序,界面如图4-1所示。程序界面分为整车参数输入、精度设置、演示设置、计算结果、操作按钮五个部分。
整车参数输入部分用于输入整车的基本参数及修正系数。考虑到试验中车辆前外侧参考点的选取和车辆的行驶轨迹都有一定的偏差,而仿真是没有任何偏差的。为了使计算结果更接近于试验结果,通过对大量试验数据分析,在计算程序中增加了修正算法和修正系数。
精度设置部分用于设置程序的计算精度和直线驶出路段长度。计算精度定义为整车前外侧参考点A沿圆弧路段行驶时的位置每次在圆弧上变化的角度,无单位,取值范围为0.01~1。当车辆在圆弧路段行驶时,每次变化的角度θ=计算精度×1°;当车辆在直线驶出路段行驶时,每次变化的长度n=计算精度×100 mm。
演示设置部分用于设置AutoCAD演示车辆仿真试验过程时是否保留轨迹及显示轨迹的间隔。轨迹间隔定义为间隔几个计算精度显示一次。如图4-2为保留轨迹时的载货车直角弯道行驶仿真试验演示结果。
计算结果部分用于显示转弯通道最大宽度的计算结果及修约值结果,并判断是否满足法规要求。程序还显示了车辆在转弯通道最大宽度时的位置及姿态,同时计算了整个试验过程中车辆尾部的最大外摆值。
操作按钮部分的四个按钮分别执行校核计算、车辆状态数据导出、利用AutoCAD演示、利用AutoCAD绘制车辆在转弯通道最大宽度时的位置及姿态这四个功能。
4.2 计算结果与试验结果比较
利用上述程序对几款样本车型的转弯通道最大宽度进行仿真計算,并经过实际试验验证,得到结果如表1所示。
通过对表1中各车型的仿真结果与试验结果的比较,可以发现仿真结果与试验结果基本相同,有少数车型偏差为0.1m。因此,该仿真方法可以在载货车研发初期判断车辆的直角弯道通过性。
5 结论
车型开发初期必须对车辆某些性能的进行判断,以便及时调整车型参数及配置,预防车型开发后期调整参数及配置带来的损失。本文通过建立数学模型、设计VB程序仿真计算车辆的直角转弯通道最大宽度,并通过与试验结果的对比证明该仿真方法是有效的,为车型开发初期判断车辆的直角弯道通过性提供了一种有效方法。
参考文献:
[1]陈家瑞. 汽车构造(第3版)[M]. 北京:机械工业出版社,2011.
[2]王望予. 汽车设计(第4版)[M]. 北京:机械工业出版社,2011.
[3]罗朝盛. Visual Basic 6.0程序设计实用教程 [M]. 北京:清华大学出版社,2004.
[4]张晋西. Visual Basic与AutoCAD二次开发 [M]. 北京:清华大学出版社,2002.
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
科学与财富(2016年26期)2016-12-01
价值工程(2016年30期)2016-11-24
数学学习与研究(2016年19期)2016-11-22
考试周刊(2016年84期)2016-11-11
考试周刊(2016年84期)2016-11-11
考试周刊(2016年85期)2016-11-11
课程教育研究·学法教法研究(2016年21期)2016-10-20
科技视界(2016年22期)2016-10-18
成才之路(2016年26期)2016-10-08