一种SCARA 机器人小臂优化设计
2024-05-08 06:15古明标
现代制造技术与装备 2024年3期
古明标 张 静
(1.东莞新友智能科技有限公司,东莞 523000;2.东莞职业技术学院 现代工业创新实践中心,东莞 523808)
工业机器人作为劳动力替代人工,在工业生产中扮演着越来越重要的角色,机器人产业已被确定为我国战略性重点发展产业。选择顺应性装配机器手臂(Selective Compliance Assembly Robot Arm,SCARA)机器人具有高刚度、高精度、高速度、结构简单和适用性强的特点,广泛应用于装配、搬运等工业领域。随着工业的迅猛发展,对于SCARA 机器人在精确度、效率、可靠性和智能化方面的要求也日益提高,因此SCARA工业机器人也在不断改进,以满足企业需求。
振动是工业机器人运行过程中常见的问题,也是一个不可忽视的问题。特别是机器人低速运行时,容易出现机体振动,造成整个机器人本体振动。振动会直接影响机器人的精度和稳定性,严重时还会对周围设备构成危害,缩短机器人使用寿命,而小臂结构是影响机器人振动的一个关键因素。对小臂优化的研究方法包括有限元分析方法、拓扑优化等。例如,采用有限元分析方法,通过结构静力分析、模态分析,应用结构优化技术,优化小臂的截面尺寸及相应壁厚[1]。文献利用ANSYS Workbench,以最大变量为约束条件,以小臂结构厚度为优化变量,以小臂质量为目标函数,对码垛机器人小臂进行尺寸优化,并完成臂部连杆的拓扑优化[2]。对210 kg 工业机器人设计一种便于生产和维修的小臂结构,采用模块化设计方法,使得组成小臂的3 个模块之间相互独立,增强其通用性[3]。基于变密度法的优化算法,同时考虑结构静、动力学性能的双目标,利用ANSYS Workbench 有限元软件实现钢质壁面作业机器人小臂结构的拓扑优化,实现轻量化设计[4]。目前,对SCARA 机器人小臂的研究主要集中于模型优化和参数优化,而对大、小臂整体的优化及其对机械性能的影响还有待进一步完善。
通过仿真研究方法,分析一款SCARA 机器人的振动特性,并对振动薄弱部位进行优化。运用SolidWorks 软件建立机器人三维结构模型,通过ANSYS 软件进行模态分析,得到机械臂的前6 阶振型图。利用遗传算法得到大、小臂的优化长度,同时利用拓扑优化方法对影响本体振动的小臂进行结构优化,得到高强度、高刚度、重复定位准确的小臂重构模型,达到降低执行端抖动的目的。
1 SCARA 机器人结构分析
SCARA 机器人是一类四自由度并联机器人,由基座、大臂、小臂和末端执行器组成,分别形成3 个旋转关节和1 个移动关节[5]。SCARA 机器人具有灵活性好、刚度高的特点,可通过各轴之间的协同运动实现物体的定位和抓取。文章所涉及的SCARA 机器人可以实现升降运动、螺旋运动和旋转运动,能够在短距离内频繁加减速。
1.1 SCARA 机械臂的三维模型
该款机器人机械臂总长600 mm,底座一轴为750 W 电机,大臂为400 W 电机,小臂为100 W 电机,旋转轴为100 W 带刹车电机,Z轴采用花键丝杆。利用SolidWorks 软件建立机器人三维结构模型,如图1 所示。
1.2 模态分析
模态分析是结构分析和优化的主要工具。经过模态分析可以得到SCARA 机械臂本体的动态特性参数,为结构优化提供依据[6]。研究利用ANSYS 分析软件,通过导入三维模型、设置材料及接触类型、划分网格、加载与求解,对SCARA 机械臂进行模态分析。研究中采集前10 阶固有频率作为参考,并关注对振动特性起决定性作用的前6 阶固有频率和模态分析,如图2 所示。SCARA 机械臂变形前10 阶固有频率情况,如表1 所示。
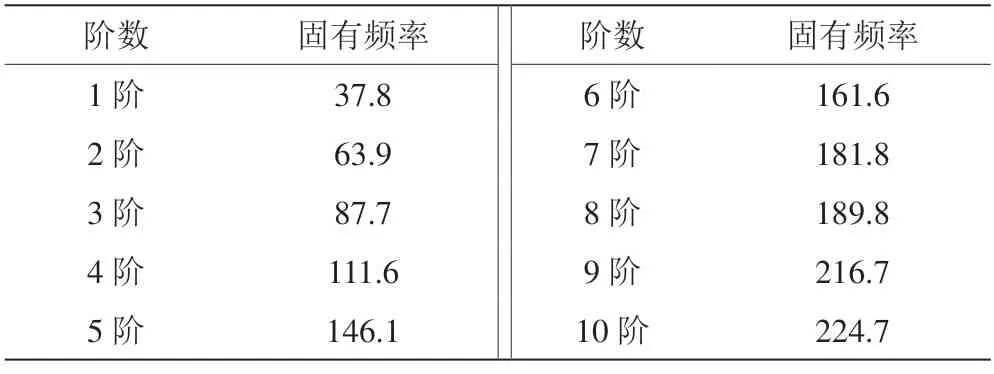
表1 SCARA 机械臂变形固有频率 单位:Hz
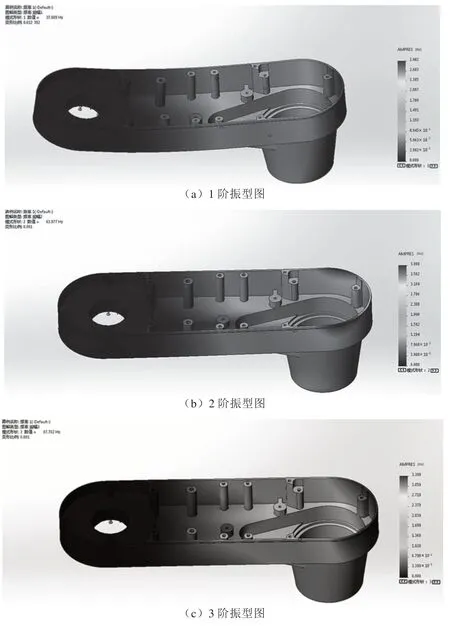
图2 SCARA 机械臂振型图
根据图2 可知,低阶频率小臂变形明显,且中、前端变形较为突出。1~3 阶振型图显示,小臂前端变形较大。4 阶振型图显示,小臂中间变形最大。为了避免因共振引起的变形,增加小臂的低阶频率是一种有效的方法。小臂连接大臂和执行末端,其强度和刚度直接影响机器人的寿命,而且小臂的轻微变形也会对机器人的精度产生较大影响。因此,通过优化SCARA 机器人的小臂,达到提高低阶频率的目的,从而提高机器人的精度、寿命和性能。
2 基于遗传算法的臂长设计
遗传算法优化可以有效解决SCARA 机器人末端稳定性问题[7]。利用刚度评价函数,采用遗传算法对臂长进行优化。SCARA 机器人有4 个关节,ki表示第i个关节的刚度。机器人关节刚度矩阵为对角矩阵,表达式为
机器人的雅可比矩阵J、末端刚度矩阵K、关节刚度矩阵Kq之间的关系为
通过D-H 参数表,利用微分变换求得SCARA机器人的雅可比矩阵为
式中:s12=sin(θ1+θ2),c12=cos(θ1+θ2),s1=sinθ1,c1=cosθ1;a1、a2分别为前臂、后臂的长度;θ1、θ2分别为前臂和后臂转角运动范围。
当机器人所受外力和变形均很小时,外力F和执行末端变形X的线性关系为
为了分别研究力与力矩对移动变形和转动变形的影响,将刚度矩阵K进行分块处理,即
式中:f为末端力矢量;n为末端力矩矢量;Kfd为力-线位移刚度矩阵;Knd为力矩-线位移刚度矩阵;Kfδ为力-角位移刚度矩阵;Knδ为力矩-角位移刚度矩阵;d为末端移动变形;δ为末端转动变形。
因为末端执行器主要受到线性力的影响,所以选择Kfd最小的奇异值k作为刚度性能的指标。此外,根据雅可比矩阵可得到以下结论:k与机器人的位形有关,描述的是机器人在特定位形下的刚度,因此被称为局域刚度指标。全域刚度指标是指机器人在整个工作空间内刚度性能的指标,用ηK表示。全域刚度指标ηK与局域刚度指标k满足以下等式
式中:W为机器人的可达空间;φ为关节空间;θ1、θ2为关节角。
全域刚度性能指标是机器人在整个可达空间中末端刚度的平均水平,也是关于机器人臂长L1、L2的函数。因此,在臂长约束范围内,求解使得ηK最大的臂长分配,即可对SCARA 机器人大、小臂长进行优化,通用优化模型为
在MATLAB 中可以通过Toolbox 工具箱设置相应的参数,实现遗传算法对大、小臂长分配的优化。根据该款SCARA 机器人的设计要求,令L=600 mm,得到最优解为L1=325 mm,L2=275 mm,即大臂长325 mm,小臂长275 mm。
3 小臂结构拓扑优化
基于数学优化理论的拓扑优化是结构设计的重要方法之一。该方法可以合理分布材料,使结构更加轻量、高效、可靠。拓扑优化方法可分为3 个步骤:第一,将设计区域分割成若干个小区域;第二,利用优化法则优化小设计区域的结构;第三,删除非必要区域,保留下来的区域即为最优的拓扑结构。
3.1 小臂拓扑优化数学模型
基于减小SCARA 机器人执行末端的抖动问题,采用相对密度法对小臂进行拓扑优化。由于单元相对密度与材料弹性模量间的关系可由连续的密度函数表示,将相对密度作为设计变量,以最小化柔度作为目标函数,并将材料优化的体积比作为约束条件,以便寻找使小臂达到最大刚度的设计。建立相应的数学模型为
式中:ρ为设计变量,其下限记为ρmin;N为材料单元数;i为材料单元的序号;C(ρ)为结构柔度函数;X为结构的位移向量;xi为单元位移向量;K为结构的总刚度矩阵,初始单元刚度矩阵记为k0;F为结构载荷矢量;V(ρ)为优化后的体积;V0为结构初始体积;fv为体积约束设定的比例值;p为密度惩罚系数。
该优化模型将单元的相对密度下限值设置在0~1。如果材料的相对密度小于下限值,材料将被去除;如果材料的相对密度大于下限值,则将被保留。
3.2 小臂拓扑优化过程
首先,确定小臂的设计区域和非设计区域,将小臂与大臂和执行末端连接的部分确定为非设计区域。其次,用ANSYS Workbench 软件中的Topology Optimization 功能优化长度为275 mm 的小臂,得到拓扑优化模型。最后,针对拓扑优化后模型进行重构,重构后结构不仅能够减小质量,还能提高臂的刚性和低阶固有频率,减少共振。综合考虑,重构后的小臂结构模型如图3 所示。与原结构相比,优化后小臂质量为1.600 kg,比原结构的1.836 kg 降低12.85%,质量减轻效果明显。
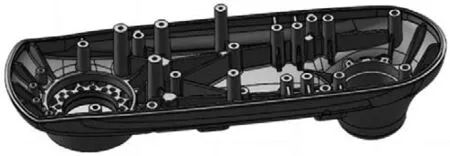
图3 小臂重构模型
4 性能分析与评估
对优化后的SCARA 机器人小臂进行静力学分析和模态分析,得到前6 阶固有频率值,如表2 所示。
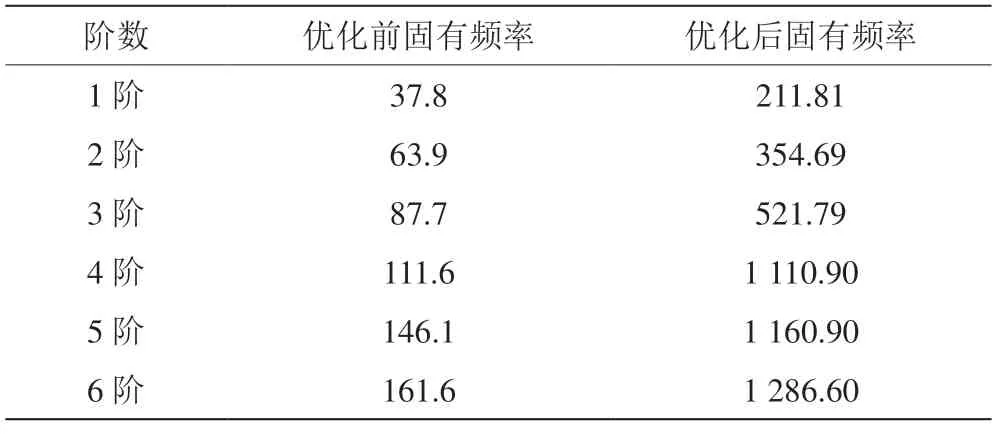
表2 优化前后的前6 阶固有频率 单位:Hz
通过分析可知,优化后总质量降至1.6 kg,减少14.75%。同时,等效应力为1.8 MPa,减少12.85%。结构的强度和刚度明显增加,显著提升了力学性能。优化后,各阶模态固有频率均有所提高,其中1 阶固有频率提高了4.6 倍。此外,优化后提升了小臂的抗振性能,实现了对SCARA 机器人重复定位精度和抑振能力的优化。
5 结语
文章研究一种SCARA 机器人,并通过模态分析优化机器人小臂结构。通过提高小臂的共振频率区间,成功避免机器人执行端的振动,从而提高了重复定位精度。采用刚度评价函数,并利用遗传算法对臂长进行优化,最终得到最优的大、小臂长度分配。通过拓扑优化重新构建小臂,完成轻量级的小臂设计。该设计成功实现了高刚度和高精度的操作。
猜你喜欢
建筑机械化(2023年9期)2023-10-31
包装与食品机械(2021年5期)2021-11-06
大电机技术(2021年2期)2021-07-21
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
现代丝绸科学与技术(2016年6期)2017-01-04
装备制造技术(2016年5期)2016-09-10
现代机械(2015年1期)2015-01-15
中国神经再生研究(英文版)(2014年23期)2014-06-01
客车技术与研究(2014年3期)2014-03-20