一种可折叠巡检与救援无人机的气动外形设计
2024-05-08 06:15侯择尧
现代制造技术与装备 2024年3期
杨 超 侯择尧 田 桐
(北京科技大学天津学院,天津 301830)
在现代无人机发展中,无人机技术与应急巡检、应急救援融合已经成为大的发展趋势。以应急救援为例,随着科技的不断革新和发展,无人机在救援任务中扮演了越来越重要的角色。在自然灾害、人为灾害等应急救援场景中,无人机有快速响应、高效率、高精度、低成本的优势。首先,自然灾害救援是无人机在救援任务中的重要应用场景。当地震、山体滑坡、洪水等自然灾害发生时,无人机能够提供空中监测和图像传输功能,帮助救援人员快速了解灾情,指导救援行动。其次,人为灾害救援是无人机在救援任务中的重要应用场景之一。比如,在发生火灾和爆炸事故等,无人机可以在危险区域进行空中监测,防止出现二次灾害。再次,无人机能够搭载光学和红外相机提供第一手信息,有利于决策者准确定位受灾点和辨别灾情。最后,无人机还有其他应急救援场景,如森林火灾控制等。可见,无人机在救援任务中的应用场景广泛,可以满足各种应急救援的需求[1]。
然而,对于从事巡检和救援任务的一线无人机使用者而言,运输和携带一直是一个挑战,影响无人机满足现代巡检和救援任务的需求。针对这一挑战,可将高升阻比、低阻力系数、长航时以及方便携带等特点作为首要的设计考虑因素。
1 无人机总体布局设计
无人机总体布局指的是无人机外形设计及构造,包括机翼、机身、尾翼、发动机等组件的布局和安装位置。在无人机的总体布局设计中,首要决策是选择合适的气动布局。这决定了各组件之间的相对位置,直接影响着无人机的气动性能,如飞行速度、稳定性、机动性以及燃油效率等。因此,无人机总体布局设计对于无人机在各种飞行条件下的综合性能影响极大。
1.1 无人机折叠设计
巡检与救援无人机的可折叠化是一种广泛采用的技术手段,一般称这种可折叠的机翼为折叠翼。在不影响任务性能的前提下缩小无人机的翼展,实现了折叠后便携状态下外形尺寸的显著减小,提高了运输阶段的储存效率。在使用阶段,将折叠后的机翼装入弹射装置内进行弹射起飞,可有效减小无人机起飞时所需的助跑距离,降低了对起飞场地的限制,提升了巡检与救援无人机在任务场景中的机动性和适应性。折叠翼的结构相对简单,质量较轻,因此适用于一些小型无人机的设计,如图1 所示。
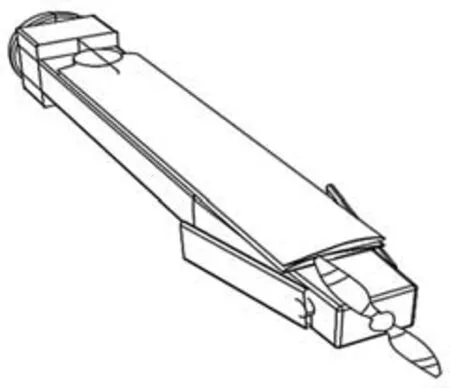
图1 折叠翼折叠后的封装状态
1.2 无人机布局设计
目前,无人机的气动布局主要有常规式布局和鸭翼布局等。其中,串列式无人机布局是一种独特的布局,特点是采用了两个相互平行的机翼。与一般的鸭翼布局不同,串列式无人机的前翼通常更加靠前。
双机翼的设计使得飞机能够在较低速度下进行巡航,非常适用于巡检与救援。这种设计可以降低飞机的最小起飞速度,增强机动性和操纵性,同时减小起降距离,降低燃料消耗,显著提高了无人机的续航性能,如图2 所示。
图2 双机翼串联翼布局
串列翼布局的机翼由前翼和后翼组成,无水平尾翼。与传统布局相比,该方案在等翼面积条件下具有较大的机翼展弦比。这种布局具有诸多优点,适用于低速和长航时无人机。首先,较大的展弦比可以提供更高的升力系数,使无人机在低速飞行时更稳定。其次,较大的展弦比能降低阻力,提高燃油效率和续航能力。最后,无水平尾翼的设计减少了尾翼的阻力和质量,进一步提高了整体性能。
最终布局方案草图如图3 所示。
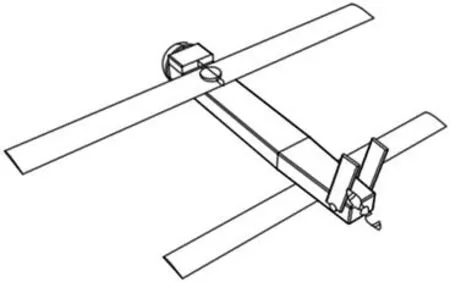
图3 最终布局方案草图
2 无人机气动设计
2.1 展弦比与平均气动弦长
折叠式弹翼无人机的主要战术技术性能为巡飞时间一般在0.25~12.00 h,巡飞高度一般在100~1 000 m,巡飞弹道段的飞行速度一般为30~100 m·s-1,弹体直径一般为80~330 mm,长度为0.5~1.5 m[2]。
这里根据该机型的特点,结合自身设计需求和对应的技术要求,设计飞机的巡航速度为15 m·s-1,巡飞时间为90 min,巡飞高度为100 m,飞机总质量为5 kg。
考虑该机型的便携能力,机身直径取10~20 cm较为合适。本文中的无人机需要提供更优的便携能力,因此机身直径取10 cm。
平均气动弦长C为
式中:croot为机翼翼根弦长;λ为根梢比。根梢比λ为1,翼根与翼尖的弦长均为13 cm,代入到式(1)得出平均气动弦长C为13 cm。
2.2 机翼翼型的初步选取
鉴于无人机采用机翼可折叠的双机翼串列式布局,需要综合考虑折叠后的尺寸和特殊结构。由于此布局带来了低速飞行和对较高升力的设计需求,该机型需要具有适应低雷诺数飞行环境的翼型。
在低雷诺数下,空气动力特性与高雷诺数时存在明显不同,主要表现为失速速度较低,难以达到高雷诺数下的升力系数水平。因此,适用于低雷诺数巡检与救援无人机的翼型需具备以下特点:首先,需要具备较大的升阻比,以在低速飞行时产生足够的升力;其次,必须能够在低雷诺数下保持各姿态方向上的稳定性;最后,翼型应具有较小的相对厚度,以降低飞行时的空气阻力[3]。因此,为了提升折叠式弹翼无人机的性能,本文选取3 种不同的翼型进行比较,分别为NACA 0012、NACA 2412、和Eppler 387 翼型,如图4 所示。

图4 二维翼型刨面形状
NACA 0012 翼型是一种对称翼型,适用于需要对称升力分布的飞行条件,常见于模型飞机和低速无人机设计。NACA 2412 翼型表现出较高的升力和相对较小的阻力,为一种理想选择,特别适用于需要较大升力的应用,如轻型无人机。Eppler 387 翼型专注于低雷诺数条件下的性能,具有良好的升阻比和稳定的空气动力学特性[4]。
3 机翼翼型的分析与验证
在研发高效便携的无人机时,翼型设计的选择与分析显得尤为重要。翼型的气动特性直接影响着无人机的飞行性能、操纵性以及在巡检与救援任务中的整体效能[5]。采用先进的数值模拟技术对多种翼型进行深入分析,获取其精准的气动特性和性能指标。
3.1 3 种翼型计算结果的对比分析
雷诺数是流体力学中用于描述流动状态的一个重要无量纲参数,通常用Re表示,计算公式为
式中:ρ为流体密度;V为流体流速;L为特征长度,通常取物体的最大线度,如圆柱体的直径或者飞机机翼的弦长;μ为流体的动力黏度。通过式(2)能够比较惯性力和黏性力的相对大小,从而判断流动的性质。
根据已知的高度100 m、速度15 m·s-1、弦长13 cm等信息,计算得雷诺数为132 451。
将得到的雷诺数作为不变的参考条件,对NACA 0012、NACA 2412 和Eppler 387 翼型进行分析处理,最终得到的分析结果如图5 和图6 所示。
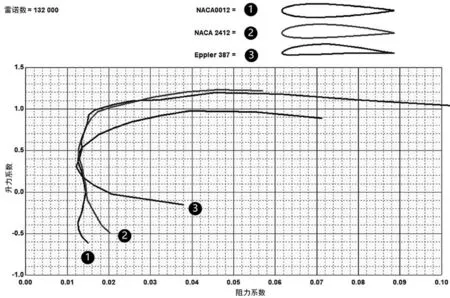
图5 相同雷诺数下的极曲线
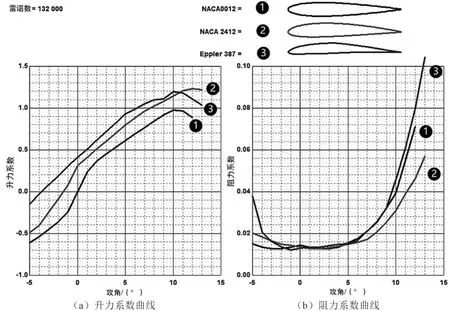
图6 雷诺数下的升力系数曲线与阻力系数曲线
3.2 升力系数、阻力系数与升阻比的比较
通过升力系数和阻力系数的特征,描述翼型在气体流动中产生升力和阻力的大小以及变化趋势,有助于深入了解翼型在不同气动工况下升力的变化规律。这种研究方式为翼型设计和无人机性能优化提供了关键信息。在不同攻角等因素的调节下,升力系数表征了翼型在特定工况下的升力和阻力与气动力学参数的关系。
升力系数Cy为
式中:Y为升力;ρ为空气密度;V为飞行速度;S为翼面积。
阻力系数Cd为
式中:D为阻力;S为参考面积。
如表1 所示,通过比较3 种翼型的升力系数随攻角变化的情况,发现随着攻角的增加,三者都呈现上升趋势。然而,在超过一定攻角后,升力系数开始下降,这是由失速现象引起的。在正常飞行中,随着攻角的增加,初始阶段升力随之增加。然而,当攻角进一步增大达到临界值时,会出现流动分离,导致升力急剧减小即失速。临界攻角是即将失速时的攻角,对应的升力系数为最大升力系数。
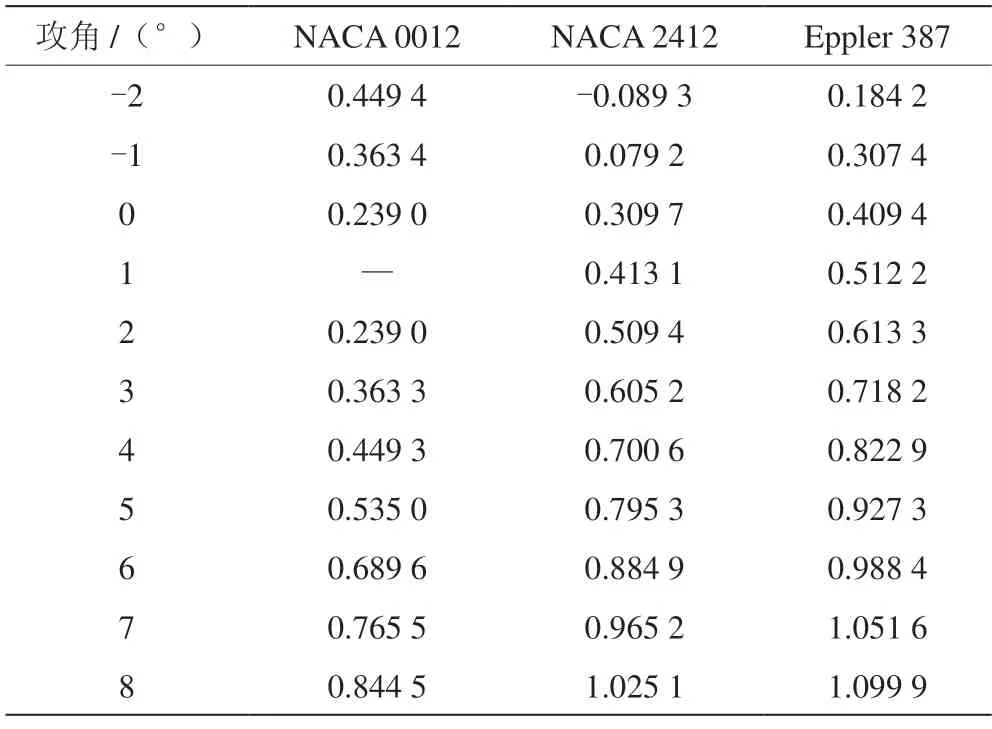
表1 3 种翼型在不同攻角下的升力系数数据对比
NACA 2412 与Eppler 387 翼型均在10°攻角后升力系数开始下降,最大升力系数分别为0.977 4 与1.194 8,而NACA 2412 在12°的攻角下升力系数达到最大1.230 6。在适合巡航状态下的小攻角范围以内,Eppler 387 的升力系数整体高于其余两种翼型,证明Eppler 387 在巡航平飞状态下的性能表现更加突出。而在阻力系数方面,在适合巡航状态下的小攻角范围以内,可以看出NACA 0012 的最小阻力系数小于其他两种翼型,但差异并没有升力系数的差异明显,如表2所示。
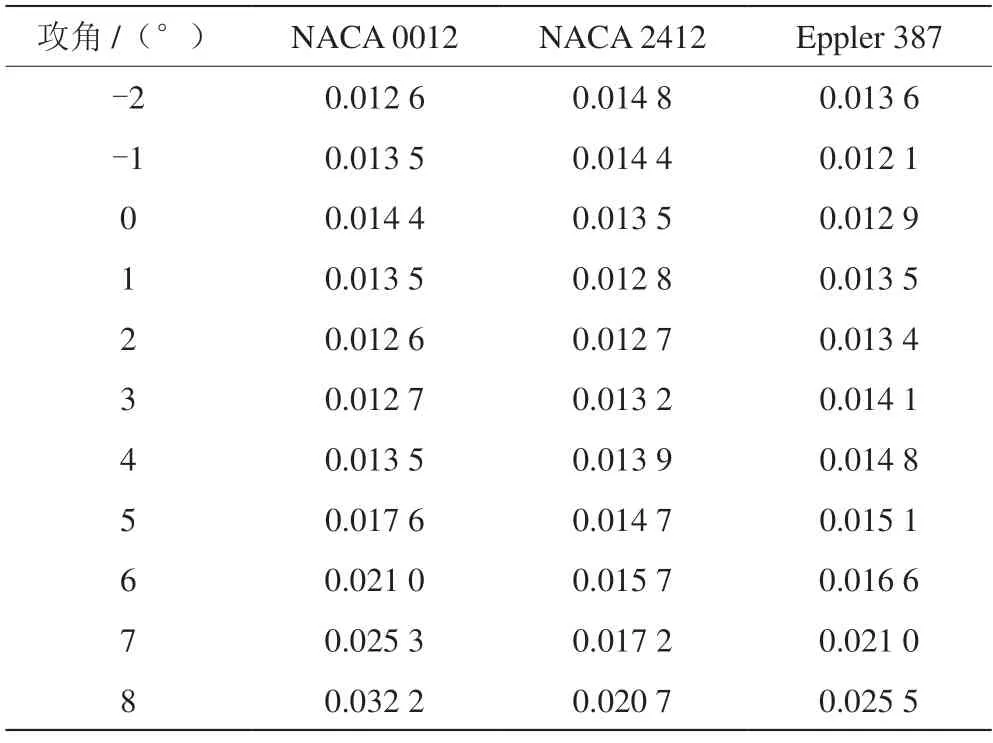
表2 3 种翼型在不同攻角下的阻力系数数据对比
从表3 可以分别找到NACA 0012、NACA 2412、Eppler 387 这3 种翼型的最大升阻比。经过对比可以明显看出:Eppler 387 翼型在最大升阻比的比较中性能最突出,达到了61.410 6,远高于其余两种翼型,而其对应的攻角恰好靠近巡航时的攻角范围。考虑该无人机的性能特点,最终选择升阻比特性更符合设计需求的Eppler 387 翼型。
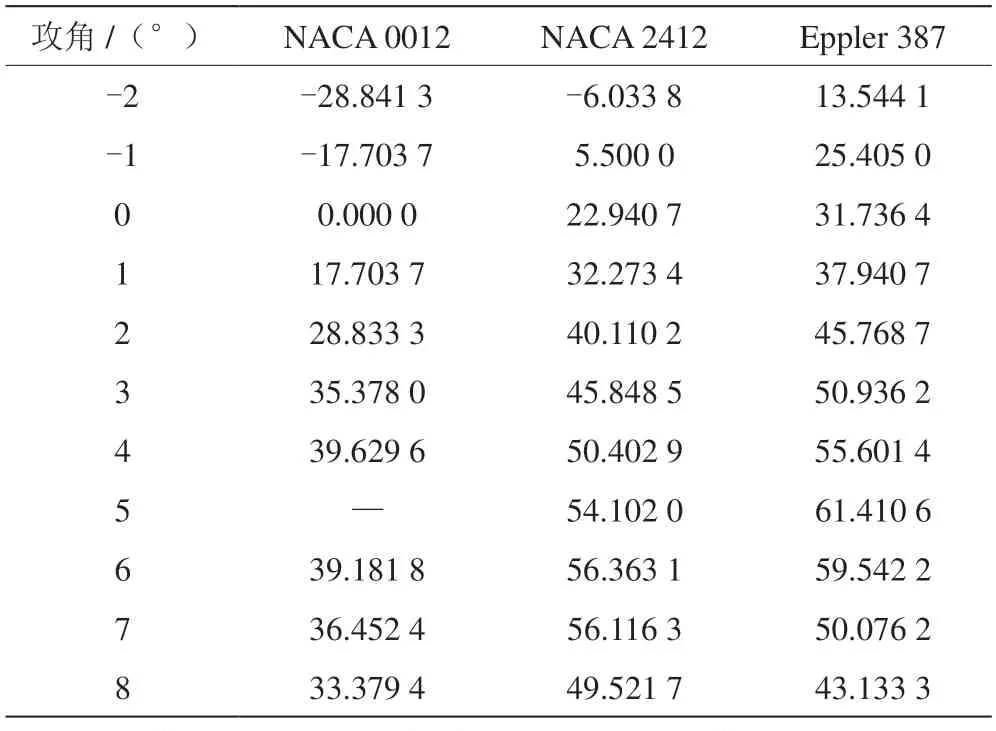
表3 3 种翼型在不同攻角下的升阻比数据对比
究其原因,以攻角为4°时3 种翼型的压强分布图为例,Eppler 387 翼型上表面的形状更突出,流管受挤压程度更加明显,流速较快压强较小,吸力峰更加突出,而NACA 0012 和NACA 2412 翼型由于上表面较为扁平,在中小攻角下上表面所产生的吸力较小,无法产生足够大的升力系数,如图7 所示。
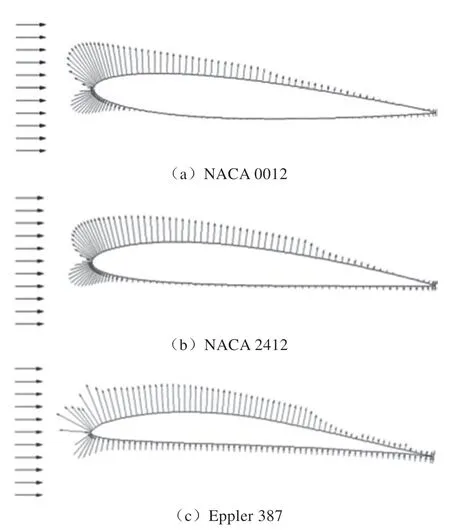
图7 不同翼型在攻角4°时的压强分布
4 结语
在飞机的布局形式中,考虑该无人机高升阻比、低阻力系数、长航时以及方便携带等使用特点进行了分析比较。结果显示,相对于其他布局形式的无人机,该设计采用的翼展更小,飞机的总尺寸减小、质量降低,同时提供了可靠的稳定性和更高的升阻比。
通过对不同翼型的比较研究发现,Eppler 387 翼型在各种飞行条件下能够产生相对较高的升力系数,表明它能够有效提供无人机所需的升力支持。在阻力系数分析中,Eppler 387 翼型阻力系数并非最低,但与其他翼型相比,在各个飞行速度范围内都能够产生较低的阻力系数。这意味着无人机所受到的阻力相对较小,有助于降低能量损失和燃料消耗,从而提高无人机的经济性和效率。在升阻比分析中,Eppler 387 翼型更优越,且最大升阻比更接近巡航状态下的攻角,使得无人机在巡航状态下具有卓越的飞行性能,符合人们对其性能的期望。
猜你喜欢
实验流体力学(2023年1期)2023-03-21
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
宇航总体技术(2019年5期)2019-10-11
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年2期)2017-11-24
北京航空航天大学学报(2016年3期)2016-02-27
西北工业大学学报(2015年4期)2016-01-19
西北工业大学学报(2015年4期)2016-01-19
民用飞机设计与研究(2015年3期)2015-12-07