听觉-言语认知负荷下工作记忆容量对跟车行驶影响
2024-03-03 01:02李坤宸袁伟李舒欣张会明
交通运输系统工程与信息 2024年1期
李坤宸,袁伟*,b,李舒欣,张会明
(长安大学,a.汽车学院;b.汽车运输安全保障技术交通运输行业重点实验室,西安 710086)
0 引言
驾驶是一项复杂多变的任务,涉及信息感知、决策制定与操作执行等过程,其对驾驶人的认知能力和技能水平提出了很高的要求。研究表明,任何认知功能的衰退都会导致驾驶绩效的下降[1]。工作记忆(Working Memory,WM)作为一种高阶认知能力,涵盖了个体注意力控制和信息处理维护等复杂的认知过程,在人类高级认知过程中发挥着核心作用[2]。已有研究表明,工作记忆与驾驶行为有着紧密联系,与驾驶人的车道保持能力、驾驶违章、环境风险感知能力和应激反应时间等密切相关[3-4]。探究不同工作记忆容量驾驶人群的驾驶行为特征,可以为驾驶安全培训干预提供驾驶人认知特性方面的见解和理论参考。
工作记忆容量代表工作记忆能力的大小,可以表征驾驶人短时间内保持和处理信息的能力。工作记忆容量越高的驾驶人具有越多的认知资源空间,能够同时存储和加工更多的信息,可以保证驾驶人注意力有效分配和多任务的灵活处理。工作记忆容量和认知负荷与驾驶行为的关系是一个具有前沿性和创新性的领域,已有学者研究了在不同认知负荷下,个体工作记忆容量差异对驾驶分心[5]、车道保持[6]及风险感和视觉注意力[4]的影响。研究发现,高工作记忆容量个体能够更好地保持对任务的专注并抑制干扰,而低工作记忆容量个体则容易因为驾驶分心或外在干扰而导致任务维持失败[7]。
驾驶分心普遍存在于日常驾驶,占用了驾驶人有限的工作记忆资源,降低了驾驶员的专注度,导致驾驶人反应延迟增加和车辆控制能力下降[8]。美国国家公路交通安全管理局根据分心源,将驾驶分心分为视觉分心、听觉分心、认知分心和生物力学分心,视觉分心和认知分心是驾驶时发生最频繁的两种分心[8]。但是,在日常驾驶中,复合分心的情况常常出现,例如,视觉分心通常会伴随生物力学分心[9]。
以往许多研究使用不同驾驶次任务,向驾驶员施加负荷,模拟不同驾驶分心状态,常见的实验次任务有浏览社交网站[10],屏幕箭头识别[9],路侧广告牌[11],数学运算[12],猜谜[12],n-back[7,9,13-14],购物车清单计算[5],发送手机短信[6]等。
例如,HASHASH等[10]通过驾驶模拟器实验,在实验中设置前车制动、行人横穿马路和信号灯突变事件,分析了浏览社交网站任务对司机行驶速度、横向位置表现、制动反应时间和眼动参数的影响,结果表明,视觉分心导致被试平均制动反应时间增加,每分钟道路注视次数、平均注视时间和凝视次数显著下降。OVIEDO-TRESPALACIOS等[11]开展模拟器实验,研究路侧广告牌对被试驾驶行为和生理指标的影响发现,路侧广告对驾驶行为的影响很大程度上受到驾驶员之间个体差异的调节,年轻司机在广告牌上投入了更多的注意资源。
TARABAY等[13]测试了不同认知负荷下,3 种模拟驾驶城市场景中驾驶员的行为和生理数据表现,表明认知分心任务会导致驾驶员生理机能的变化以及驾驶性能的下降,在高负荷任务下,驾驶员出现了调节行为(例如降低速度)。LOUIE等[5]选择购物车清单作为负荷任务,调查不同工作记忆容量在预测驾驶人分心行为的作用,结果表明,在有/无次任务下,工作记忆容量对驾驶人的制动时间具有调节作用,认知负荷导致的驾驶性能损伤对于工作记忆容量更低的人会更加明显。同样,BROADBENT等[7]使用2-back 任务,研究在乡村道路下有/无负荷驾驶人注视行为和驾驶性能表现,发现多任务驾驶导致了更大的前额叶区氧饱和度,更少的道路注视行为。
在复合分心的研究中,CHOUDHARY等[6]研究发送手机短信对驾驶行为的影响,开展乡村道路驾驶模拟实验,发现与无分心任务相比,手机短信任务导致车道横向位置标准差增加,视觉动作复合分心增加了驾驶人转向操作的随机性。李鹏辉等[9]通过开展模拟驾驶实验研究不同分心任务对驾驶人反应时间的影响,分别对驾驶人施加识别箭头和发短信任务,考察在不同的车头时距和前车减速度条件下被试的制动反应时间,结果表明,视觉分心和复合分心任务导致其对侧向行人和纵向追尾的制动反应时间增加,而认知分心任务对纵向碰撞反应时间没有显著影响。彭丹丹等[15]开展模拟器实验,研究驾驶员在完成语音导航、手持导航和手机支架导航调节任务对驾驶员眼动和行驶状态参数的影响,结果表明,与无次任务的自由驾驶相比,调节导航任务均造成驾驶分心,导航任务集中了更多的驾驶员注视资源,导致驾驶员的扫视次数增加,车辆纵向速度和纵向速度标准差下降,方向盘转角标准差和转向熵增加。CHANG等[16]设计日历会议安排、无线电调频和目的地导航这3种车内屏幕操作任务,通过触觉响应反应时间(Tactile Detection Response Task,TDRT)评估驾驶人的认知工作量,研究表明,有驾驶主任务时,执行上述任务时的TDRT 响应时间更长,驾驶员完成导航和日历任务所需要的认知工作量更高,日历日程任务的时间延迟和错误率最低,且具有最大的TDRT 响应时间。
目前,关于视觉分心对驾驶行为的影响和检测识别已较为成熟,相比视觉和动作分心,认知分心并不具有明显的外在动作特征,例如,眼动参数和头部姿态变化等[8]。因此,为更准确地检测认知分心,探索认知分心对驾驶行为的影响规律仍然是分心领域的研究热点。
但大多数研究仅考虑有/无认知负荷任务对驾驶人驾驶行为的影响,没有对认知负荷难度进行分级,考察不同认知负荷量对特定驾驶场景下驾驶行为影响。其次,有学者发现较高工作记忆容量的驾驶人具有更好的车速控制能力、危险感知能力和更少的违规行为,在抵抗分心任务带来的干扰而专注驾驶上有更好的表现。目前,在不同负荷水平下和驾驶行为影响之间,许多研究没有考虑工作记忆因素在其中的作用和影响,忽略了工作记忆在不同负荷条件下对驾驶人行为的调节作用。
在涉及危险场景的实验中,与道路实车实验相比,模拟驾驶实验在成本和安全问题具有显著的优势,因此,本文采用驾驶模拟器和Virtual Test Drive(VTD)软件搭建驾驶模拟实验跟车场景。n-back任务是麻省理工学院开发的一种经典延迟数字回忆任务,可以通过简单的方式改变被试认知负荷的大小,是对被试施加听觉-言语认知负荷(简称,认知负荷)的常用任务,被证明可以代替免提通话等任务,已经得到了广泛应用[13]。有鉴于此,本文采用n-back 任务设置不同的听觉-言语认知负荷水平。复杂跨度范式是心理学领域中测量个体工作记忆容量最广泛的测量范式,已经在许多测量个体工作记忆的实验中使用[3],本文基于这个标准测量范式,使用E-prime 3.0 进行驾驶人工作记忆容量测试。最后,本文探究不同认知负荷和工作记忆容量对驾驶人跟车驾驶绩效的影响规律,分析在不同听觉-言语认知负荷水平下,不同工作容量对驾驶绩效指标的交互与调节作用。
1 实验设计
1.1 实验设备
使用驾驶模拟器采集驾驶人的操纵行为和车辆运行状态等数据,主要由实车座舱系统,180°前视环屏显示系统,两通道后屏显示系统,六自由度运动平台,数据采集系统组成,如图1所示。

图1 六自由度驾驶模拟器Fig.1 Six degrees of freedom driving simulator
1.2 跟车场景设计
本文使用双任务范式,将n-back任务作为驾驶次任务。此任务按照2.5 s 间隔随机播放0~9 的序列,在不同的n-back 任务中,被试需要记住并回忆喇叭播放的随机序列,并回答当前播放数字前的第n个位置的数字。以1-back为例:喇叭播报的数字序列为“1,4,7,5,0,2,9,…”,当喇叭播报第2个数字“4”时,被试大声说出上一个播放的数字“1”,并记住数字“4”;当喇叭播报第3 个数字“7”时,被试说出第2 个数字“4”,并记住数字“7”;在喇叭播报第4个数字“5”时,大声念出“7”,依次类推。
目前,许多研究仅设计了有/无负荷分心任务,并没有考虑工作记忆对驾驶行为的影响,因此,本文将认知负荷难度和工作记忆容量分级。另外,不同研究关于负荷任务是否对驾驶员跟车间距保持行为有影响存在差异[13,17]。因此,在本文实验方案中,设计特定驾驶场景(跟车)的模拟实验,按照3(认知负荷:无负荷、1-back及3-back)×2(工作记忆容量:高和低)的二因素混合实验设计,开展不同前车车头时距(基准条件、基准条件±1 s、基准条件+2 s及基准条件+3 s)的实验。车头时距基准条件指:被试驾驶人在实验开始按照习惯的车头时距跟随前车,并保持1 min,驾驶模拟器采集这段时间内的跟车车头时距,计算均值作为这名驾驶人的基准跟车时距。前车在不同点位触发不同事件,前车运行示意如图2所示。
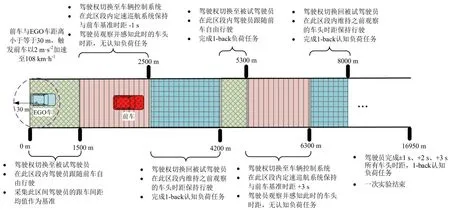
图2 前车车头时距变化的跟车实验场景设计Fig.2 Vehicle following experiment design with change of front vehicle distance
以1-back认知负荷实验为例:
(1) 被试驾驶EGO 车,前车加速至108 km·h-1后匀速行驶,驾驶人自由跟车,计算机采集该段车头时距均值作为基准。EGO行驶第1个触发点后,驾驶权切换至车辆系统,自动调整与前车的车头时距为基准条件-1 s,保持行驶30 s,被试观察并感受这段跟车距离。30 s 后,被试驾驶人重新接管车辆,跟随前车,并保持刚刚所观察的车头时距,完成1-back 认知负荷任务。1 min 后,被试重新接管车辆自由跟随前车行驶,同时,完成1-back任务,直到进入下一次车辆系统接管。
(2)到达第2、第3及第4个触发点位后,车辆系统接管EGO 车辆,调整与前车的车头时距为基准条件+1 s,基准条件+3 s,基准条件+2 s下的跟车任务,随后,被试完成1-back任务,并维持刚刚观察到的车头时距。
(3)所有跟车任务结束后,前车减速至停车,一组不同车头时距下的跟车实验完成。
为尽可能减少被试的学习效应,施加不同认知负荷水平和车头时距的顺序是随机的。每组实验按照规定速度完成驾驶大约需要15 min,每次试验结束后休息3 min。另外,在不同认知负荷任务下,本文还开展了前车速度变化的跟车实验,前车分别按照100,70,40 km·h-1速度匀速行驶,分别随机以-1.5 m·s-2和-4 m·s-2的减速度制动。道路总长约30 km,双向4 车道,标准车道宽度3.75 m,道路中央有绿色栅栏隔离,道路两侧场景包含有高山、草地、河流及少数城市建筑,天气设置为晴朗,实验路线是一条城市通往郊区的道路。
1.3 被试驾驶人招募
共招募40 名被试,其中,4 人在实验出现眩晕感退出,被试身体健康,裸眼或矫正视力达到4.8及以上。平均年龄24.1 岁(标准差1.31 岁),其中,男性20人(平均年龄24.33岁,标准差1.11岁),女性16 人(平均年龄23.8 岁,标准差1.2 岁)。平均驾驶年限为3.16 年,标准差1.71 年;平均驾驶总里程1368.2 km,标准差213.6 km。为确保实验数据的有效性和真实性,要求参与者保证在实验前两天有充足的睡眠,并没有服用过任何影响精神状态的药物。在实验结束后,给予参与者一定金额的报酬。
1.4 工作记忆容量测量
本实验测试被试驾驶人的工作记忆容量,包含复杂记忆跨度范式包括自动运算跨度(Opsan)任务、自动对称跨度(Sspan)任务、自动旋转跨度任务(Rotspan)与自动阅读跨度(Rspan)任务。详细测试过程如图3 所示,基于E-prime 3.0 软件实现,每个试次大约15 min,每个试次分为预实验和正式实验两个阶段,被试在电脑屏幕上熟悉后进入正式实验。

图3 工作记忆容量测试流程Fig.3 Working memory capacity test procedure
1.5 实验流程
正式实验过程如下:①填写个人信息问卷并签署实验知情同意书;②引导被试完成工作记忆容量测试;③向参与者介绍模拟跟车实验内容,告知参与者实验过程中认知负荷的类型以及n-back任务的实现过程;④进行时长10 min 模拟实验练习,若出现眩晕恶心等症状,则停止实验;⑤依次进行不同认知负荷下跟车实验,一位实验者协助参与者开始n-back认知负荷次任务,另一位实验者记录驾驶过程中的行车数据,并确保数据准确记录;⑥实验结束后,暂停驾驶模拟器,引导被试离开驾驶舱,保存所记录的同步数据,关闭驾驶模拟器;⑦参与者完成实验调查问卷,并支付参与者相应报酬。
1.6 实验指标提取
本文的数据来源为前车车头时距变化和前车速度变化下跟车实验,在车头时距变化跟车实验中,按照前车的绝对纵坐标位置分别提取被试根据观察到的基准条件±1 s、+2 s、+3 s 中跟车行驶片段。在前车速度变化并随机制动的跟车实验中,分别提取前车在100,40,70 km·h-1匀速行驶时被试跟车行驶片段,前车以-4 m·s-2和-1.5 m·s-2进行制动时的被试应激反应片段。
在本文中,跟车驾驶绩效指驾驶员在跟车中的驾驶行为表现,研究选择跟车速度差、跟车绝对速度、车头时距、制动反应时间和方向盘转角变化率作为跟车驾驶绩效的衡量指标。跟车速度差是驾驶人操控ECO车辆跟随前车行驶期间与前方车辆速度差值的绝对值,表示自车速度与前方车辆速度的接近程度;跟车绝对加速度是驾驶人在跟随前车行驶期间,ECO 车辆加减速度的绝对均值,反映被试加减速力度、驾驶激进程度和从容性;方向盘转角变化率表示驾驶人在驾驶车辆横向操作的频繁程度,反映驾驶人在跟车驾驶时的横向车道保持能力;制动反应时间是被试驾驶ECO车辆时,当发现前方车辆制动时,从松开加速踏板到开始踩下制动踏板所经历的时间,表征驾驶人的危险感知能力和操作反应速度,衡量驾驶人在紧急状态下的应对能力,是驾驶安全绩效评价的重要指标,决定了是否能够避免碰撞;车头时距代表ECO 在某时刻车辆以当前车速行驶至前车位置所经历的时间,表征前车制动时,ECO 车辆具有的反应时间,跟车车头时距是评价跟车行驶的安全性的重要指标。
本实验为多因素混合实验,方差分析(ANalysis Of VAriance,ANOVA)是一种定量分析方法,它不受统计组数的限制,广泛用于医学和工程领域,是用于分析不同变量对因变量的贡献大小,确定控制变量对研究结果影响的常用方法,在许多相关研究中[5,9-10,12-13]均使用了类似方法。同时,探究认知负荷大小是否影响工作记忆容量和驾驶行为的关联强度,即调节作用。因此,本文使用ANOVA 以及调节效应分析(Analysis of Moderating Effects),分析不同认知负荷和工作记忆容量对跟车行为的影响,并探究工作记忆容量在认知负荷与分析参数之间的调节作用。
2 结果
2.1 工作记忆容量测算
实验被试的Opsan、Sspan、Rotspan 和Rspan 任务的跨度得分如图4(a)所示。由于4个实验范式总分各不相同,采用z-score 标准化分别处理4个实验范式得分,将各个实验范式总分进行标准化处理后,再进行简单加和,得到被试驾驶人工作记忆容量值。将得分大于零的被试驾驶人归类为高工作记忆容量(H_WMC);将得分小于零归类为低工作记忆容量(L_WMC),不同被试工作记忆得分如图4(b)所示。
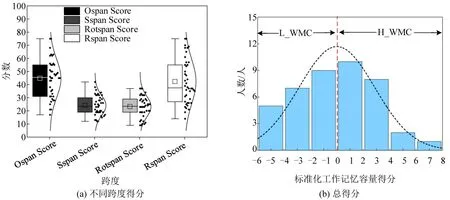
图4 工作记忆容量测试得分Fig.4 Working memory capacity test score
由图4 可知,不同被试在4 个跨度实验的得分和总得分具有较好的分散性,群体间显示出较好的差异性。
2.2 跟车速度差和绝对加速度均值
被试在车头时距变化跟车和前车车速变化的实验中,跟车速度差均值与工作记忆容量和认知负荷关系如图5所示。

图5 跟车速度差、认知负荷和工作记忆容量关系Fig.5 Scatterplot of following speed difference,working memory capacity and cognitive load
由图5 可知,在车头时距变化实验中,数据分布很混乱,个体工作记忆容量和实验认知负荷水平对跟车速度差没有明显的影响规律;在前车车速变化实验阶段中,在散点图右上部分的跟车速度差更大,即随着实验认知负荷水平增加,被试的跟车速度差变大,且在低工作记忆容量组较为明显。
使用双因素ANOVA 分析和事后比较检验分析认知负荷水平和工作记忆容量对跟车速度差的影响,结果如表1所示。

表1 跟车速度差和绝对加速度ANOVA分析结果Table 1 ANOVA analysis of speed difference and acceleration with front vehicle
在前车车头时距变化跟车实验中,不同组间驾驶人的跟车速度差均值如图6所示,图中,n.s.为no significant 的缩写,表示p>0.05,无统计学上的显著性差异。
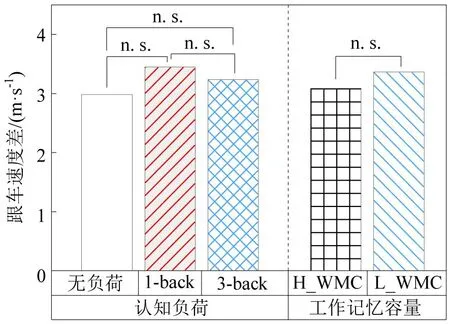
图6 车头时距变化下的跟车速度差均值Fig.6 Speed difference of change in distance ahead
由表1 可知,认知负荷水平(F(2,323)=0.628,p=0.536>0.05)和工作记忆容量(F(1,323)=0.449,p=0.505>0.05)对跟车速度差没有显著性影响。由图6 可知,与高工作记忆容量驾驶人相比,低工作记忆容量驾驶人具有更高的跟车速度差,低工作记忆容量的驾驶人感知并维持与前车相同速度的能力相对较差,但并没有显著性的组间差异。
使用双因素方差分析后显示,工作记忆容量与认知负荷的交互作用对跟车速度差均值亦无显著性影响(F(2,323)=0.671,p=0.514>0.05) 。这可能是由于在前车匀速行驶过程中,驾驶人只需要稳定的保持加速踏板开度,不需要频繁的调整或者切换注意力,也不需要进行复杂的推理,导致此驾驶任务对认知资源占用较小,因此,工作记忆容量和认知负荷水平没有表现出对认知负荷的显著性影响。
但是,在前车速度变化下的跟车实验中,发现工作记忆容量(F(1,215)=20.199,p=0.001<0.01)和认知负荷水平(F(2,215)=5.308,p=0.006<0.05)对跟车速度差均值有显著影响,不同组间类型驾驶人的跟车速度差如图7所示。

图7 工作记忆对跟车速度差均值的调节效应Fig.7 Regulating effect of working memory on speed difference of following vehicle
由图7 可知,在前车速度变化的实验中,整体上,高工作记忆容量驾驶人跟车速度差较小且没有受到认知负荷的显著影响,跟车的平顺性更高。随着认知负荷的增加,低工作记忆容量驾驶人的跟车同步性变差,因为,在前车变速跟车实验中,需要分配更多的认知资源维持跟车任务,导致剩余认知资源减少。高工作记忆容量驾驶人相比低工作记忆容量驾驶人拥有更多的可利用认知资源。
最后,探究前车速度变化的实验工作记忆容量与认知负荷的交互作用对跟车速度差均值的影响。使用回归模型中的乘积项检验调节效应的显著性,发现工作记忆容量在认知负荷水平与跟车速度差的调节作用(F(2,215)=6.104,p=0.003<0.05),调节效应结果如表2所示。

表2 跟车速度差调节效应分析表Table 2 Analysis of adjustment effect of difference of following speed
综合表2 和图7 发现,工作记忆容量在认知负荷与驾驶人跟车一致性关联强度间起到正向调节作用,即随着认知负荷水平的增加,工作记忆容量差异导致的跟车速度差值的表现差异被放大了,随着认知负荷水平的增加,不同工作记忆容量驾驶人的跟车速度差的差异就越明显。
在前车车头时距变化实验中,不同认知负荷水平下驾驶人的加速度均值分布如图8 所示,图中,n.s.表示两组间p>0.05,无显著性差异,*表示两组间p<0.05。

图8 车头时距变化下的跟车加速度均值Fig.8 Mean value of following acceleration under variation of following distance
由表1 可知,认知负荷水平(F(2,323)=3.944,p=0.035<0.05)对跟车加速度有显著性影响,工作记忆容量F(1,323)=0.139,p=0.714>0.05 对其没有显著性影响。如图8所示,随着认知负荷水平的增加,驾驶人的跟车加速度均值逐渐增加,说明认知负荷越小,驾驶人迫切需要车辆加速/减速的倾向或力度就越小,驾驶人对跟车行驶的任务绩效表现较好。另外,使用Bonferroni 校正的事后分析发现,对于跟车加速度,无负荷任务与1-back(p=0.035<0.05) 和3-back (p=0.018<0.05) 任务之间存在显著差异;而1-back与3-back(p=0.715>0.05)之间没有显著差异。说明,当认知负荷增加时,不同认知负荷的组间差异也增大,但当认知负荷达到被试驾驶人认知资源上限后,不同认知负荷组之间的差异就变得不再显著。
在前车速度变化的跟车实验中:认知负荷(F(2,215)=0.200,p=0.657>0.05)和工作记忆容量(F(1,215)=0.188,p=0.667>0.05)对跟车加速度没有显著性影响。在显著性水平为0.05条件下,使用回归模型中的乘积项检验调节效应,在前车车距变化和前车速度变化的实验中,工作记忆容量与认知负荷的交互作用在前车车距变化(F(2,323)=0.429,p=0.658>0.05)和前车速度变化(F(2,323)=1.893,p=0.163>0.05)的跟车实验中对加速度均值没有显著性影响。
2.3 跟车制动反应时间
在前车车速变化实验中,不同认知负荷水平下驾驶人的制动反应时间如图9 所示,图中,**表示两组间p<0.01;*表示两组间p<0.05。

图9 不同组间驾驶人的制动反应时间Fig.9 Braking reaction time of drivers in different groups
如图9 所示,不同工作记忆容量(F(1,215)=9.331,p=0.003<0.05)和认知负荷水平(F(2,215)=5.698,p=0.005<0.05)对驾驶人制动反应时间有显著性差异,工作记忆容量与跟车制动反应时间呈负相关。随着认知负荷的增加,驾驶人制动反应时间呈增大的趋势,在施加一定的认知负荷条件下,高工作记忆容量具有更短的制动反应时间,说明在前车速度变化的跟车任务中,认知负荷会增加反应时间,且认知负荷水平越高,影响越大。在低工作记忆容量组中,3 种认知负荷均存在显著差异(p<0.05),说明认知负荷对低工作记忆容量驾驶人影响较大。
使用回归模型的乘积项检验工作记忆容量调节效应,工作记忆容量与认知负荷水平的交互作用(F(2,215)=3.347,p=0.048<0.05)对制动反应时间有显著影响,调节效应分析结果如表3和图10所示。交互项XW对跟车制动反应时间达到了显著性水平,因此,工作记忆和认知负荷的调节效应显著。认知负荷越高,高低工作记忆容量驾驶人的制动反应时间差异越显著,高工作记忆容量驾驶人的优势在施加一定的认知负荷后才能体现出来。表明在高难度的认知负荷条件下,工作记忆容量对跟车制动反应时间的影响更为显著;在低难度的认知负荷条件下,工作记忆容量对跟车制动反应时间的影响较为微弱。

表3 跟车制动反应时间调节效应Table 3 Analysis of regulating effect of braking reaction time in car following
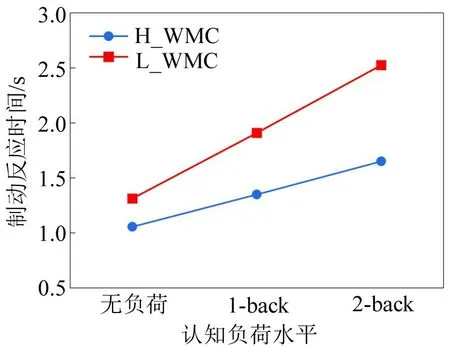
图10 工作记忆容量对跟车制动反应时间的调节效应Fig.10 Regulating effect of working memory capacity on braking reaction time
2.4 方向盘转角变化率
前车车头时距变化实验中,工作记忆容量(F(1,323)=10.735,p=0.002<0.05) 对方向盘转角变化率有显著影响,但没发现认知负荷(F(2,323)=0.125,p=0.883>0.05) 的显著性影响。不同组间驾驶人的方向盘转角变化率分布如图11 所示,图中,n.s.表示两组间p>0.05,*表示两组间p<0.05。
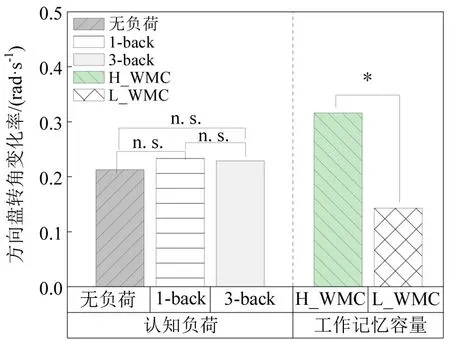
图11 不同组间驾驶人的方向盘转角变化率Fig.11 Steering wheel angle change rate of different groups
由图11 可知,在不考虑驾驶人认知系统差异时,不同认知负荷对方向盘转角变化率没有显著影响,但是,高工作记忆容量的驾驶人比低工作记忆容量具有更高的方向盘转角变化率,表明高工作记忆容量的驾驶人有较强自我调节能力,高工作记忆容量驾驶人会根据自己对路况和车辆状态的预测,更频繁地调整方向盘转角,实现更高效或更舒适的驾驶。
同时,通过对车道中心线偏移量标准差的考察也印证了上述发现,高工作记忆容量驾驶人(均值0.1909)具有比低工作记忆容量驾驶人(均值0.2205)更低的车道中心线偏离标准差(F(1,323)=9.247,p=0.003<0.05)。在显著性水平为0.05 条件下,使用回归模型中的乘积项检验工作记忆容量调节效应,没有发现工作记忆容量与认知负荷水平的交互作用(F(2,215)=0.372,p=0.690>0.05)对方向盘转角变化率的显著影响。在前车变速实验中,均没有发现认知负荷(F(2,215)=0.280,p=0.756)和工作记忆(F(1,215)=0.182,p=0.083)对方向盘转角变化率的显著影响。
2.5 跟车间距和车头时距
分别分析前车车头时距和前车车速变化的跟车实验,发现驾驶人的工作记忆容量和认知负荷对两种情形下的跟车距离有相同的影响规律,因此,统一分析不做区分。不同组间驾驶人的跟车距离和跟车距离标准差如图12 所示,图中,n.s.表示两组间p>0.05,**表示两组间p<0.01。
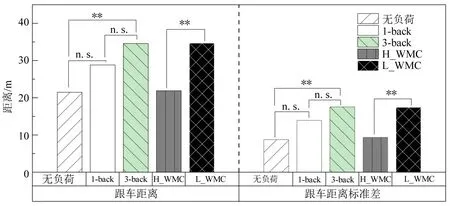
图12 不同组间驾驶人跟车距离、跟车距离标准差Fig.12 Standard deviation of following distance and following distance of drivers
工作记忆容量对跟车距离均值(F(1,539)=9.080,p=0.001<0.05) 和跟车距离标准差(F(1,539)=10.136,p=0.000<0.05)有显著影响;认知负荷对跟车距离均值(F(2,539)=6.248,p=0.002<0.05)和跟车距离标准差(F(2,539)=8.719,p=0.00<0.01)影响显著。随着工作记忆容量的减小和认知负荷水平的增加,跟车距离均值和标准差呈增加的趋势。表明工作记忆容量较高的或者在认知水平较低的情况下,对自身驾驶技能比较自信,通常倾向于保持较小的跟车间距,但是,当认知负荷水平过高时,驾驶人不足以保持较低间距且保证安全性,出现增加车距的行为。
同时,使用事后分析发现,不同认知负荷水平的组间差异性分析表明无负荷任务与3-back 任务间存在显著差异(跟车距离p=0.001<0.05,跟车距离标准差p=0.000<0.05),1-back 与无负荷任务(跟车距离p=0.223>0.05,跟车距离标准差p=0.057>0.05),3-back(跟车距离p=0.248>0.05,跟车距离标准差p=0.295>0.05)任务之间均不显著。认知负荷增加到某个阈值后(例如中等或高等级),认知负荷难度之间在跟车距离均值和标准差上才会出现显著差异;但是,当认知负荷达到一定阈值后(例如极高等级),不同认知负荷之间在这些指标上就变的不具有显著差异了。
在前车车头时距变化的跟车实验中,分析驾驶员的车头时距保持情况。收集驾驶人完成前车车头时距增加1 s、减少1 s、增加2 s及增加3 s实验的跟车区间数据。没有发现工作记忆容量(F(1,323)=0.182,p=0.083>0.05)、认知负荷(F(2,323)=0.744,p=0.390>0.05)和工作记忆容量、认知负荷交互作用(F(2,323)=2.354,p=0.102>0.05)对驾驶人车头时距的显著影响。
对被试驾驶人在每个车头时距实验中和认知负荷(无,1-back,3-back)下的平均跟车车头时距进行单因素方差分析。不同认知负荷下,被试完成不同车头时距实验时保持的车头时距如表4 和图13所示,图中,**表示两组间p<0.01;*表示两组间p<0.05。
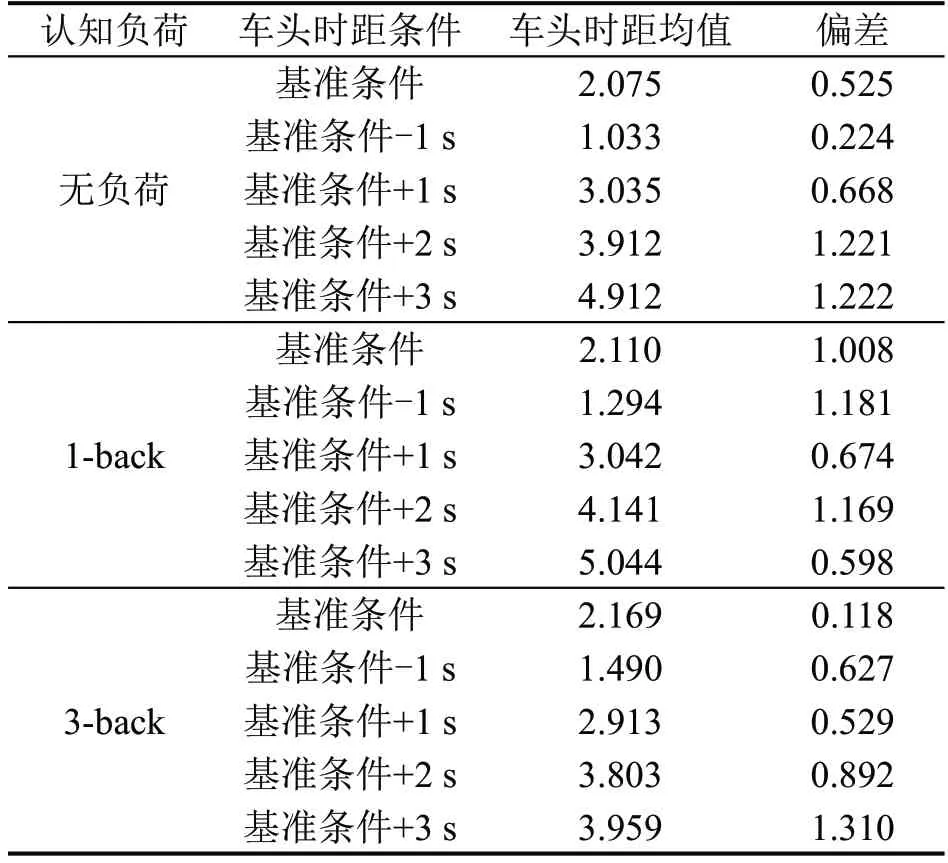
表4 不同认知负荷与不同车头时距条件下驾驶人车头时距的描述性统计Table 4 Descriptive statistics of driver headway under different cognitive loads and different headway spacings
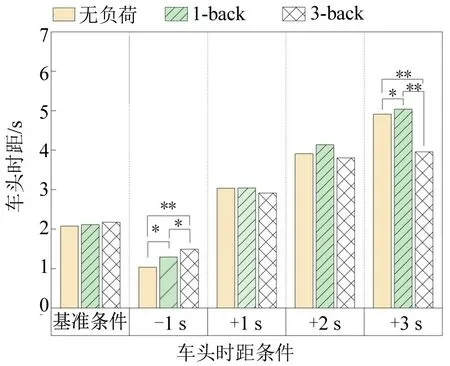
图13 不同组间驾驶人跟车车头时距Fig.13 Distance between drivers in different groups
基准条件-1 s(F(2,105)=8.433,p=0.002<0.05)和基准条件+3 s(F(2,105)=12.532,p=0.000<0.01)车头时距条件下,发现认知负荷对平均车头时距的显著影响。基准条件-1 s下,随着认知负荷水平的增加,驾驶人完成规定车头时距的能力越来越差。然而,在其他车头时距类别中,认知负荷对保持的车头时距没有显著影响。
这是因为驾驶人对于较低或较远的跟车距离的实验中,距离的估计和观察变得不那么容易,需要消耗相当数量的认知资源。在这些任务中,被试驾驶人必须保持模拟器设定的新车头时距。在大多数情况下,发现被试能够在有认知负荷或没有认知负荷的情况下做到这一点。然而,在+3 s车头时距类别中,被试驾驶人在认知负荷条件下保持的车头时距明显小于在无负荷条件下保持的车头时距,与传统的想法相反:当负荷较大时,驾驶人应采取行动以客观地减少负荷,例如,增大车头时距以获得更安全的跟车距离。
3 讨论
3.1 跟车速度差和绝对加速度均值
在前车车头时距变化的实验中没有发现不同认知负荷水平、工作容量与跟车速度差的显著关系。这与BROADBENT等[7]的研究发现略有不同,在BROADBENT 的研究中,双重任务下高工作记忆容量的被试具有更小的速度差,表明高工作记忆容量的被试具有更好的车速保持能力。然而,本文研究中,没有发现这种显著性关系。但在前车速度变化的实验中,本文发现工作记忆容量和认知负荷以及交互作用对跟车速度差的显著性影响,高工作记忆容量驾驶人具有更好的跟车同步能力,这与BROADBENT等的研究相同。
针对本文的研究结果,可能是在前车车头时距变化实验中,由于引导车的车速是恒定的,被试一旦做好了车速调整便只需要维持固定的加速踏板开度。跟车主任务占用的认知资源相对较少,可支配的认知资源较多,因此,不同认知负荷任务不会损害驾驶人跟车任务的表现,驾驶人不需要频繁地调整或切换注意力,也不需要进行复杂的推理或解决问题,因此,工作记忆容量对其车速的影响较小。而在速度变化且伴随着随机制动的跟车实验中,驾驶人必须持续不断的关注前车速度和当前跟车距离。侧面印证了工作记忆容量在认知负荷与跟车速度差之间的调节作用,工作记忆解释了认知负荷水平对跟车驾驶绩效的影响。
3.2 跟车绝对加速均值
本文仅发现了认知负荷水平在车头时距变化跟车实验中对跟车加速度的显著影响,跟车加速度随着认知负荷的增加而增大。说明随着认知负荷的增加,所有驾驶人都倾向于更大采取更快的加/减速度,在认知负荷任务难度增加时,不同认知负荷组之间的差异也增大,但当认知负荷任务难度达到一定阈值后,认知负荷水平导致的加速度差异变得不再显著。
印证了在面临较高的认知负荷任务加载时,认知负荷剥夺了驾驶人分配在驾驶主任务的注意力资源,从而使驾驶人放弃了或者忽略了频繁的速度修正。但是,当驾驶人一旦有剩余注意力发现当前车速或跟车距离不满足心理预期时,便会采取更迅速的加速/减速方式进行补偿,以达到完成更好驾驶表现的心理预期。
3.3 制动反应时间
本文研究发现,认知负荷、工作记忆容量与制动反应时间的显著相关关系,与MELNICUK等[18]的研究发现不同,MELNICUK 等提出认知控制假说的概念,认为驾驶人预测对迫近物体的快速反应(依靠自动操作的驾驶任务)不受认知负荷的影响,对没有其他预测信号提示的前车制动反应,认知负荷对跟车制动反应时间没有影响。
但是,SONNLEITNER等[17]研究发现,随着认知负荷增加,被试的制动反应时间显著增加。本文认为可能是由于实验次任务的形式有所差异的原因,本实验的次任务为听觉-言语认知负荷,虽然这种认知负荷会一定程度上造成视觉信息的感知干扰,但本文研究实验并没有直接剥夺驾驶人的视觉资源,因此,不管在什么水平认知负荷下,当感到前车快速接近时,能够快速的释放无关资源,并迅速尽可能地刹车。但是,本文并非认为认知负荷水平对于驾驶人的安全表现没有任何影响,认知控制假说只限于某些应激场景,TARABAY等[13]研究发现,认知负荷加重了驾驶人的大脑负荷,仍然影响驾驶安全。
工作记忆容量越高的被试的制动反应时间越短,与ZHANG等[3]的发现一致,工作记忆在认知负荷和制动反应时间之间担任重要的信息加工作用。但是,也有研究持不同的观点,KAVOURAS等[1]研究认为在应急状态下,一方面,那些工作记忆容量较高的驾驶人会花费更多的时间收集更多的信息以做出更谨慎合理的行为,可能导致决策延迟;另一方面,工作记忆容量较低的驾驶人在面对紧急情景下,没有足够认知资源容量反而会做出更加草率和冲动的决定,可能导致驾驶人的制动反应时间更短。总的来说,本文的研究表明,工作记忆容量高的驾驶人能够更有效地分配注意力资源,更有效地抑制外界干扰,缩短对突发事件的反应时间。
最后,本文研究还发现,工作记忆容量对跟车制动反应时间的影响存在认知负荷任务的正向调节效应。与考虑工作记忆容量的驾驶分心预测的LOUIE等[5]研究相类似,在普通驾驶人任务中,高工作记忆容量确实显示出较好的驾驶绩效,当施加购物清单次任务时,这种影响的作用被放大了,不同工作记忆容量驾驶人的驾驶绩效差异就越明显。
在本文中,遇到前车突然刹车的反应受到工作记忆容量的调节作用,工作记忆容量越高,反应时间越短;反之亦然。然而,这种影响并非恒定不变,而是受到认知负荷任务水平的调节,认知负荷水平的难度越高,消耗认知资源越多,制动反应时间的差异就越明显;认知负荷任务水平越低,消耗认知资源越少。认知负荷任务水平对工作记忆容量和跟车制动反应时间之间的关系起到正向调节作用,说明它会增强这种关系。
3.4 方向盘转角变化率
前车车头时距变化跟车实验中,工作记忆容量较高的驾驶人拥有更大的方向盘转角变化率,表明工作记忆容量高的驾驶人在不同的认知负荷水平下,更加频繁的调整方向盘,以实现更高效或更舒适的驾驶方面具有更高的优势[7],侧面印证了BADDELEY[2]研究所提出的工作记忆系统资源有限理论。本文发现,认知负荷水平对车道保持能力没有显著影响,与HASHASH等[10]的研究结果一致。但是,在大多数人的传统或直观的认知中,因为,认知负荷占据了相当部分的资源,被消耗的认知资源对于车道保持任务是很重要的,所以,随着认知负荷的增加,车道保持水平似乎应该变得更糟[14]。但MEDEIROS-WARD等[14]研究指出,车道保持或许是一个封装的内部循环过程,不需要驾驶人投入太多的注意力就能完成。
3.5 跟车间距和车头时距
认知负荷水平的增加,跟车距离和标准差也会增加。工作记忆容量更大的驾驶人往往有更小的跟车距离和跟车距离标准差,在执行跟车任务时,倾向于保持较近而稳定的跟车距离。而工作记忆容量低的驾驶人则倾向于保持较远而波动性较大的跟车距离。在认知负荷增加时,跟车距离均值有所增加,可以解释为一种风险补偿效应,驾驶人通过主动增大跟车距离保持主观上最佳的可容忍风险水平。这也可以用认知控制假说[7]解释,在有认知负荷的情况下,驾驶人会朝着跟车任务需求的最佳跟车距离贴近。但是,SONNLEITNER等[17]却发现,认知负荷任务与跟车间距之间没有明显的关系。
低工作记忆容量的驾驶人在认知负荷任务难度增加时,跟车间距显著增大,尤其是在3-back 组中,被试对认知负荷任务难度的变化非常敏感。表明:在认知负荷任务难度增加到某个阈值后,不同工作记忆容量之间组间的差异才会显著,且高工作记忆组比低工作记忆容量组表现好。
在前车车头时距变化的实验中,仅在车头时距为基准条件-1 s 和基准条件+3 s 的跟车实验中,发现认知负荷与被试车头时距的显著表现。表明相比基准的跟车车头时距,保持更小的车头时距和更远的车头时距对驾驶人来说更具有挑战性,或者说这项任务占据了更多的认知资源,尤其是在双重任务下。在本实验结束后的访谈中,造成上述问题的原因可能是因为本文使用驾驶模拟器,虽然这项设备有很好的沉浸感,但是,在较远的车头时距情况下,投影画面的深度与真实场景相比驾驶人场景的立体感仍然较弱,可能造成驾驶人很难像现实世界中那样准确感知跟车距离。
4 结论
本文使用驾驶模拟器开展不同听觉-言语认知负荷任务下的跟车驾驶实验,主要结论如下:
(1)前车速度变化的跟车实验中,工作记忆容量在认知负荷水平与驾驶人跟车速度一致性间起到正向调节作用,随着认知负荷水平的增加,不同工作记忆容量驾驶人的跟车速度差的差异就越明显,采取更激烈加减速的倾向越高。
(2)不同认知负荷任务和工作记忆容量对应激制动反应时间没有显著性的影响,工作记忆容量越高的驾驶人有更快的反应时间,工作记忆容量对跟车制动反应时间的影响存在认知负荷任务的调节效应。
(3)认知负荷对驾驶人的车道保持能力没有显著性的影响,而工作记忆容量较高的驾驶人往往具有更大的方向盘转角变化率,表明这类驾驶人会更加频繁地修正自己的横向位置,也具有更小的车道位置标准差。
(4)工作记忆容量水平对跟车间距具有显著性影响,工作记忆容量较高的驾驶人往往具有更小的跟车间距标准差,能够更好地胜任前车速度阶段变化的跟车任务,并将车辆稳定在较小的车距水平。
本文的研究结果表明,工作记忆容量对驾驶人在复杂和分散注意力的交通环境中进行信息加工和控制能力有重要影响。工作记忆容量高的驾驶人在跟车过程中,可以更有效地分配注意力资源,并及时调整自己的行为,适应变化的交通情况,更有效地处理前方情况和后方情况之间的冲突,以及自身速度和前方车辆速度之间的差异。
猜你喜欢
测试技术学报(2023年2期)2023-04-06
人类工效学(2021年5期)2022-01-15
军事文摘(2020年24期)2020-02-06
绥化学院学报(2019年10期)2019-10-12
心理科学进展(2018年8期)2018-02-21
中国老区建设(2016年4期)2017-01-15
人民交通(2016年9期)2016-06-01
心理科学进展(2015年5期)2015-02-26
大连交通大学学报(2012年2期)2012-07-02
中学生数理化·高一版(2008年6期)2008-11-15