GNSS时间比对设备设计与实现
2020-06-30 00:44解建伟刘连照
无线电工程 2020年7期
韩 华,解建伟,刘连照
(1.石家庄诺通人力资源有限公司,河北 石家庄 050000;
2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;
3.中华通信系统有限责任公司 河北分公司,河北 石家庄 050081;
4.中国洛阳电子装备试验中心,河南 洛阳 471003)
0 引言
1980年,美国国家标准局首次发布了共视时间比对方法[1]。1983年,国际守时实验室应用该方法实现了异地原子钟之间的时间比对和同步[2]。受限于当时GPS的发展,起初的共视时间比对主要基于GPS伪码的单通道接收处理,共视时间比对的用户需要遵循国际计量局定期更新发布的共视时刻表,在统一时刻接收约定的GPS卫星,产生共视文件后通过数据交换完成时间比对[3]。随着导航信号接收技术的进步,目前时间比对接收机已发展为多通道接收机,即在同一共视时刻能够同时观测到多颗卫星,为时间比对性能的提高提供了基础性支撑[4]。
国外生产时间比对设备的厂家主要有MESIT,SEPTENTRIO,PIKTIME和TFS等公司[5]。MESIT公司生产的GTR系列时间比对设备采用商用接收板卡搭配时差测量单元实现,关键部件采用恒温控制,可自动化收集保存测量数据,支持多种输出协议,共视文件支持GPS及GLONASS等导航系统[6];SEPTENTRIO公司生产的POLARX系列时间比对设备采用自研接收板卡实现,整机进行小型化、低功耗设计,大小仅为235 mm×140 mm×37 mm,搭配上位机软件使用,共视文件支持GPS及GLONASS等导航系统;PIKTIME公司生产的TTS系列时间比对设备采用商用接收板卡搭配时差测量单元实现,内置工控机运行嵌入式系统具备大尺寸监控屏幕,共视文件支持GPS及GLONASS等导航系统[7]。国内共视技术的研究起步较晚,目前已有多家科研机构针对共视时间比对技术开展了研究[8-9],形成了多型号的接收设备及共视处理软件,各厂家时间比对设备采用接收板卡搭配时差测量单元实现。
本文设计了国产化的GNSS时间比对设备,支持BDS,GPS,GLONASS及GALILEO系统信号接收及处理,利用观测数据经数据处理后直接获得钟差信息,有效减少了时差测量单元引入的测量误差。
1 共视比对原理
GNSS时间比对原理如图1所示。
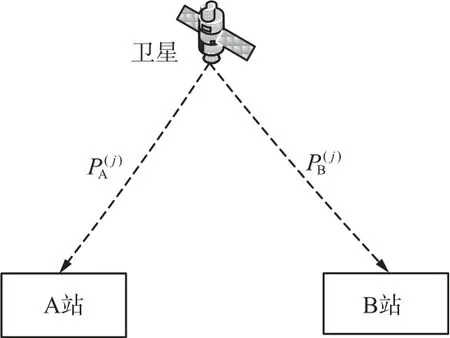
图1 时间比对原理Fig.1 Principle diagram of time transfer
GNSS共视时间比对本质上以相同的共视卫星作为共同参考,位于异地的待同步地面站接收卫星信号,按照共视时间表进行数据处理获得本地时间与观测卫星间的相对钟差,通过比较2站的相对钟差,即可获得异地待同步地面站间的钟差[10-11]。
定义本地钟相对于参考时间(GNSS系统时间)的钟差为ΔT(t)=T(t)-tref(t),其中,T(t)为t时刻对应的本地时间;tref(t)为t时刻对应的参考时间。因此,在相同的GNSS时刻t,位于异地的A,B两站对GNSS系统时间的钟差可分别记为[12]:

对于进行共视时间比对的A站和B站,可将式(1)进一步改写为:

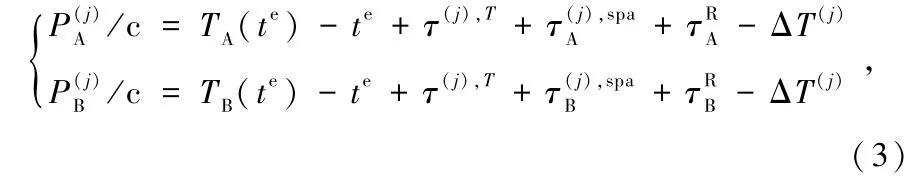


由此得:
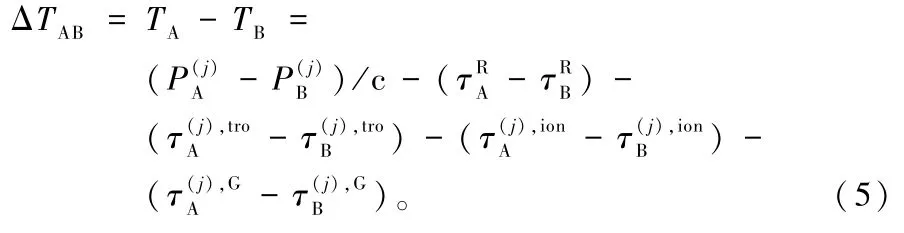
上述即为A站、B站间进行卫星共视时间比对的计算模型,由上式可知,A,B站的共视卫星钟差及共视卫星发射时延被完全抵消。
2 时间比对设备设计
2.1 硬件设计
GNSS时间比对设备采用19英寸2U上架机箱设计,如图2所示。内部采用插卡设计,各导航系统采用独立板卡,可根据不用应用场景进行组合使用。

图2 GNSS时间比对设备Fig.2 GNSS time transfer equipment
GNSS时间比对设备由全频点天线、变频模块、解算模块、时频模块、监控模块及软件等组成,如图3所示。
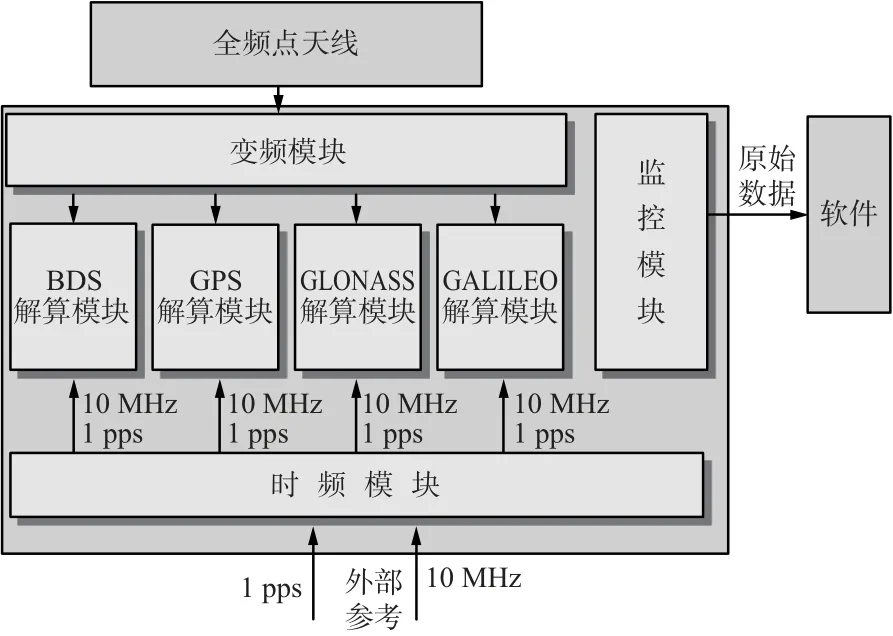
图3 GNSS时间比对设备组成Fig.3 Composition diagram of GNSS time transfer equipment hardware
全频点天线为射频信号输入口,采用右旋圆极化设计,能够同时接收BDS,GPS,GLONASS,GALILEO系统的导航信号,并完成低噪声放大;变频模块完成导航信号的下变频功能,输出中频信号;解算模块以外部输入的10 MHz,1 pps信号为参考,进行信号的捕获、跟踪及原始数据输出等;时频模块对外部输入的10 MHz,1 pps信号进行分路输出,分配至内部各模块;监控模块采集整机的状态信息用于设备前面板状态显示,同时上报整机数据至软件;软件用于显示整机状态及观测数据,观测数据按照RINEX3.0格式要求进行本地存储,同时按照共视标准数据处理得到CGGTTS文件。
2.2 软件设计
GNSS时间比对设备软件处理流程如图4所示。软件在接收到时间比对设备上报的观测数据后按照RINEX格式进行数据存储,同时判断是否为共视时刻,如果不是共视时刻则返回对下一时刻进行判断;若当前为共视时刻则进入共视处理过程,对测距信息进行链路误差修正,包括电离层误差、对流层误差及相对论误差等,根据星历参数计算当前时刻的卫星位置及卫星钟差,综合利用伪距、卫星位置、卫星钟差及天线位置坐标等信息分别得到本地相对导航系统的钟差即REFSYS,本地相对卫星的钟差即REFSV,最终结合实验室信息补充CGGTTS文件头内容,形成最终的CGGTTS标准共视文件。

图4 GNSS时间比对设备软件处理流程Fig.4 Flowchart of GNSS time transfer equipment software processing
3 测试验证
影响时间比对指标的因素除空间误差的修正外,设备自身的伪码测量精度、设备时延稳定性等也会有一定影响[14-15],因此时间比对设备的测试验证分为伪码测量精度试验验证、设备时延稳定性试验验证、超短基线试验验证及300 km基线试验验证。
3.1 伪码测量精度试验验证
伪码测量精度试验采用模拟源的方法,将待测设备与模拟源有线连接,调整各导航频点发射信号功率,使到达待测设备的等效功率电平不小于各类信号的灵敏度电平。待设备工作稳定后,每种信号连续工作24 h,模拟源输出的伪距值作为真值,将待测设备输出的伪距值与真值做差,使用统计的方法对各频点数据进行处理,结果如表1所示。
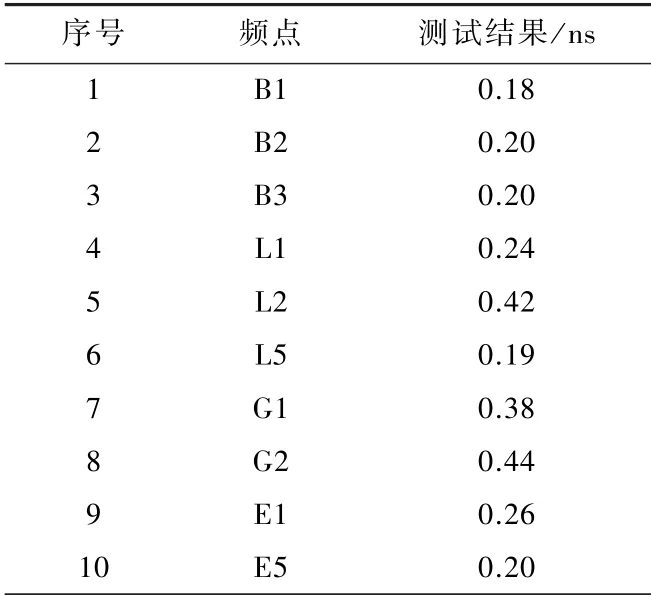
表1 伪码测量精度数据记录Tab.1 Pseudo-code measuring accuracy data record
3.2 设备时延稳定性试验验证
设备时延稳定性试验采用模拟源的方法,将待测设备与模拟源有线连接,调整各导航频点发射信号功率,使到达待测设备的等效功率电平不小于各类信号的灵敏度电平。待设备工作稳定后,每种信号连续工作24 h,并进行3次开关机测试,每次开关机后测试2 h,共计30 h测试数据,模拟源输出的伪距值作为真值,将待测设备输出的伪距值与真值做差,使用统计的方法对各频点数据进行处理,结果如表2所示。
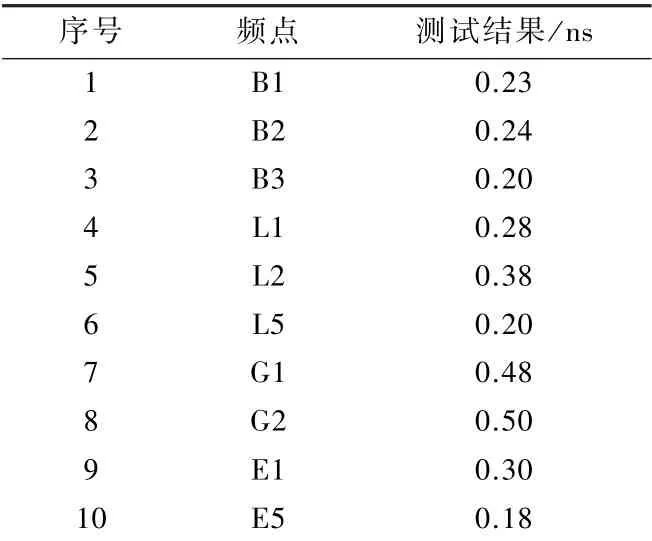
表2 时延稳定性数据记录Tab.2 Time delay stability data record
3.3 超短基线试验验证
超短基线测试原理框图如图5所示。
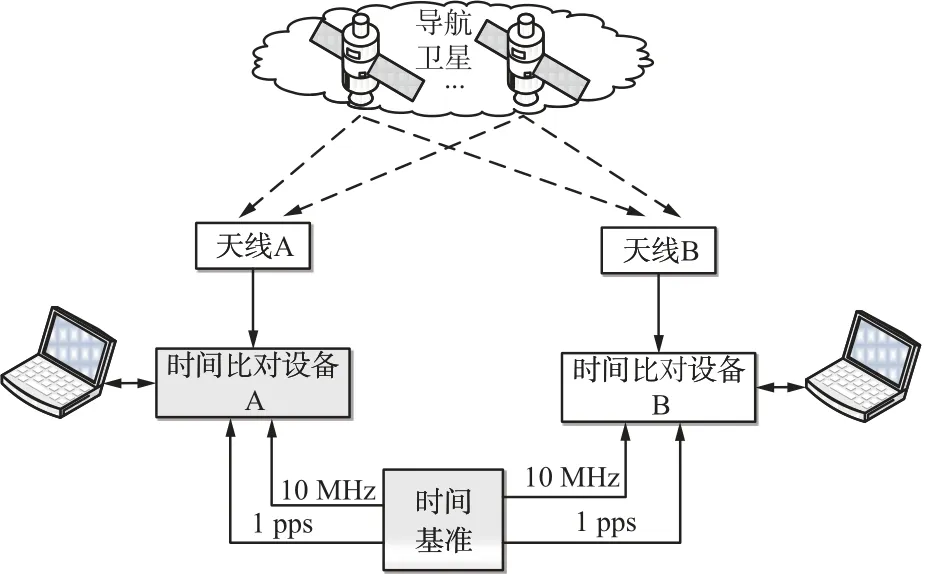
图5 超短基线测试原理框图Fig.5 Principle diagram of ultra-short baseline test
将天线A,B安装于开阔无遮挡处,时间比对设备A,B同时接入时间基准的10 MHz,1 pps信号,连续记录2天观测数据,使用PPP的方法对天线的位置坐标进行精确标定,连续测量5天,通过计算机完成CGGTTS文件的产生与存储。测试完成后,处理2台卫星共视比对接收机的CGGTTS数据得到钟差数据,采用标准方差的方法评估时间比对A类不确定度,使用GPS进行时间比对的A类不确定度为0.20 ns,如图6所示。使用BDS进行时间比对的A类不确定度为0.41 ns,如图7所示。
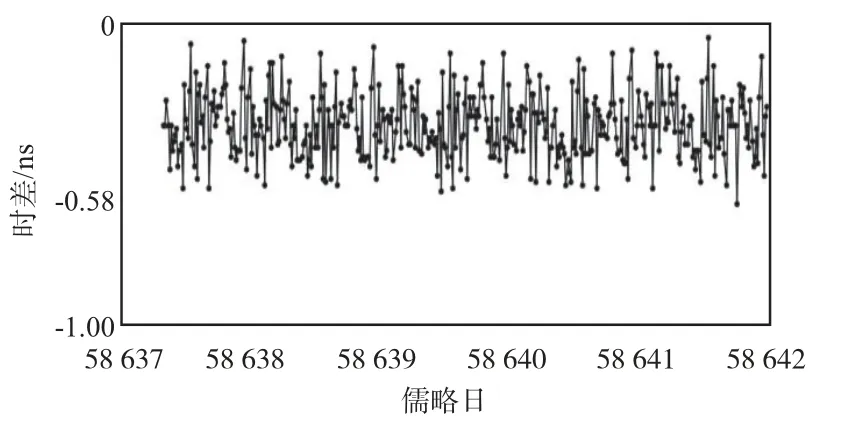
图6 超短基线GPS共视比对结果Fig.6 Ultra-short baseline GPS common view comparison result
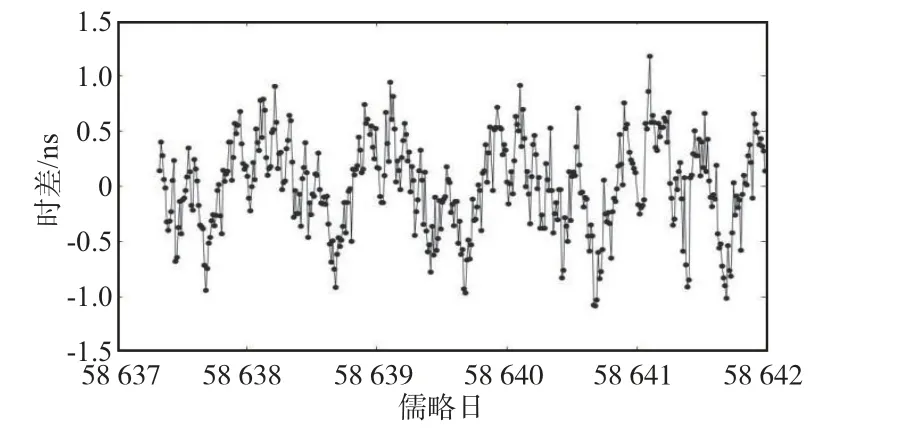
图7 超短基线北斗共视比对结果Fig.7 Ultra-short baseline BDS common view comparison result
3.4 300km基线试验验证
300 km基线条件下,测试原理框图如图8所示。在A,B两地待测时间比对设备与已知不确定度的基准比对设备分别进行同源超短基线连接,测试用线缆与超短基线测试用线缆一致。

图8 300 km基线测试原理框图Fig.8 Principle diagram of 300 km baseline test
利用2天的观测数据使用PPP的方法对天线坐标进行精确标定,连续测量6天。计算机完成时间比对设备CGGTTS文件的产生与存储,利用基准比对设备连续测量6天,存储CGGTTS文件,处理基准比对设备的CGGTTS数据,处理时间比对设备的CGGTTS数据,基准比对设备A与基准比对设备B的时差记为T1,时间比对设备A与时间比对设备B的时差记为T2,则远程时间比对结果T为:
T=T2-T1。
采用标准方差的方法评估时间比对A类不确定度,使用GPS进行时间比对的A类不确定度为0.42 ns,如图9所示。使用BDS进行时间比对的A类不确定度为0.45 ns,如图10所示。
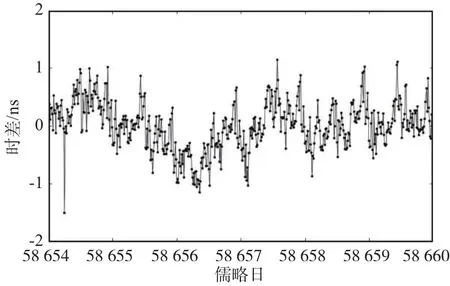
图9 300 km基线GPS共视比对结果Fig.9 300 km baseline GPS common view comparison result
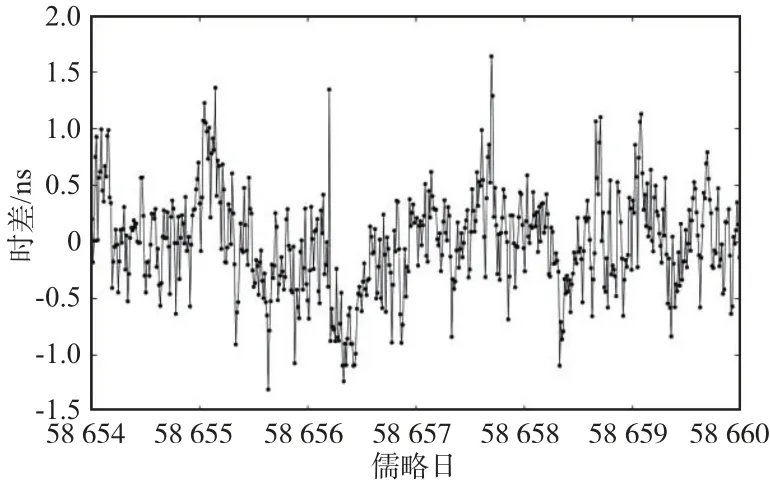
图10 300 km基线北斗共视比对结果Fig.10 300 km baseline result of BDS common view comparison test
4 结束语
本文设计了一种GNSS时间比对设备,以用户10 MHz,1 pps为内部测量基准,输出的观测数据能够直接反应钟差信息,省去了传统共视时间比对设备内部的计数器单元。经测试,设备自身的伪码测量精度和时延稳定性均优于0.5 ns,超短基线及300 km基线条件下A类不确定度优于1 ns,能够满足开展高精度时间比对的需求。随着北斗系统的建设,后续可进一步开展基于北斗三号时间比对设备的研制工作。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
信号处理(2022年2期)2022-03-07
导航定位学报(2021年5期)2021-10-13
通信电源技术(2021年8期)2021-08-26
导航定位与授时(2020年5期)2020-09-23
导航定位学报(2019年2期)2019-06-06
舰船电子对抗(2019年6期)2019-04-27
导航定位学报(2018年3期)2018-09-03
探测与控制学报(2018年2期)2018-05-09