
面向机械产品专利规避的功能裁剪路径研究
2015-12-30 05:14李辉,刘力萌,赵少魁等
中国机械工程 2015年19期
关键词:产品创新
面向机械产品专利规避的功能裁剪路径研究
李辉刘力萌赵少魁于菲檀润华
河北工业大学国家技术创新方法与实施工具工程技术研究中心,天津,300130
摘要:专利日益成为知识产权战略下最重要的竞争性要素,掌握核心专利的企业通过设置专利壁垒阻碍后来者的竞争,因此如何针对专利技术进行创新设计,以突破专利壁垒将十分必要。为保障创新设计既为有效创新设计又不侵犯现有专利技术,考虑到功能裁剪与专利规避原则的契合性,首先基于专利制度约束与功能模型建立了专利权利范围;其次,基于不同专利规避原则对功能裁剪路径进行了研究;最后,基于专利规避前端设计准则,提出了完整的创新设计流程,并通过管道机器人实例验证了方法的有效性。
关键词:功能剪裁;专利规避;机械管道;产品创新
Study on Function Cutting Paths of Patent Design Around for Mechanical Products
Li HuiLiu LimengZhao ShaokuiYu FeiTan Runhua
National Technological Innovation Method and Tool Engineering Research Center,
Hebei University of Technology,Tianjin,300130
Abstract:With patents being the most important competitive factors in intellectual property strategy, more enterprises with core patents blocked latecomers by using patent barriers. Therefore, it was necessary to break though patent barriers to carry on the innovation design according to patent technology. To protect the effective and non-infringe existing patents of the new innovation design, firstly, the scope of patent rights was established based on patent system constraints and function model by considering the fusion between the function cutting and patent infringe principle. Secondly, the function of cutting road was studied according to different principles of patent design around. Finally, a complete innovation design process for patent design around was put forward by front-end design principles of patent design around, and the effectiveness of the design process was validated by using of pipeline robot.
Key words: function cutting; patent design around; pipeline of machinery;product innovation
0引言
目前,在我国机械生产企业里,针对现有专利壁垒[1-2],如何选择创新方法路径,使创新设计成果在专利制度约束下更加有效显得尤为重要。
专利规避设计是一项源于美国的合法竞争行为[3],是以法律侵权判断原则为约束,通过对专利权利要求书中的必要技术特征进行删减或替代等操作,发掘出与原专利权利要求不同设计方案的过程。通过专利规避设计使得企业可以在不侵犯他人专利权的前提下,重新改进技术方案,从而获得与现有专利保护范围不同的新技术[4]。黄文仪[5]采用组件回避设计方法、等价交换方式与创新思维结合进行专利规避设计;罗炳荣[6]通过实例的对比与验证提出了应用于专利规避设计的元件失踪法及负数归一法;林明宪[7]提出将元件权重评析法应用于专利分析,结合专利策略,采用公理设计的独立原理来进行规避结果检验的设计流程。随着TRIZ理论的发展,将TRIZ理论与专利规避设计相结合,可为创新设计理论提供新的发展方向,江屏等[8]提出通过功能裁剪方法构建规避对象的功能模型,根据组件规避原则建立新产品的裁剪变体并确定问题。Li等[9]提出基于权利要求分解的技术特征进行裁剪的规避方法,证明功能剪裁作为TRIZ的一种创新设计方法,可提高产品理想度以实现产品创新设计[10]。
但是将功能裁剪应用于专利规避设计的现有研究中尚存在如下问题:一是未基于机械产品专利撰写的法律语言特点正确提取专利权利范围信息,并将权利范围信息转变成可进行下一步功能裁剪的基础;二是仅依据专利侵权原则阐释了功能裁剪与组件规避原则的一致性,未确立面向不同原则的功能裁剪具体路径并将其应用于专利规避设计流程。
因此,本文为解决上述问题,提出建立基于机械专利三大层次、五大属性的专利权利信息抽取过程图以及基于功能模型的专利权利范围图;进一步建立面向不同专利侵权原则的功能裁剪路径;然后依据专利制度约束特点对裁剪路径优先权及裁剪范围进行研究,最后将功能裁剪路径应用于专利规避设计流程,并用管道机器人的专利规避设计进行了验证。
1基于制度约束的专利功能模型建立
1.1功能模型与专利信息提取制度约束
功能模型是功能分析的结果,通常以现有产品系统为基础,分析系统中各个元件之间的作用关系,确定系统的有用功能、不充分功能、过剩和有害功能,进而建立产品的功能模型图,如图1所示,功能模型图能直观反映各元件要素之间的作用关系及连接关系,是进行功能裁剪形成裁剪变体的基础。以产品系统为基础建立的功能模型缺乏对专利权利要求书的分析,无法确定保护产品系统的专利权利范围,容易使后续的创新研究成果因侵权而失效。故以功能模型图去提取专利权利范围信息,将专利的权利保护范围直观反应在功能模型图上,能够将法律语言表达的技术信息转变成可以用TRIZ等创新方法进一步设计的技术信息,同时确保后期的裁剪能面向专利规避实现不侵权设计,确保功能裁剪更有针对性。

图1 产品功能模型
受专利法律制度约束,一份专利文件权利保护范围最大的独立权利要求包含着解决主要问题的所有必要技术特征,对独立权利要求信息的完整提取,是构建专利权利范围图的基础。
基于专利文件权利要求的撰写特点,通常要描述三大层次和五大属性的问题,三大层次包括组件(system assembly,SA)、零件(system component,SC)和部件(system part,SP)。组件为完成某个功能多个零件组成的一个集合;零件就是将机械产品拆卸到最分散的程度时候仍然保持自身完整的最小机械构成,相当于元件;部件就是零件身上还需要继续进行定义的技术特征,如通孔、燕尾槽、滑道这些都是虚体部件,如图2所示,其中虚线框中的部件SP是传统的功能分析忽略的结构要素,比如来复枪中的膛线能确保射击的准确性,是专利具备创造性的授权基础,但在功能模型中却不体现。五大属性包括名称、连接关系、位置、材料和结构特征。五大部件在三大层次上侧重点各不相同,提取权利信息时有所区别。

图2 基于鱼骨图的机械产品专利三大层次信息
1.2基于功能模型的专利权利信息提取过程
首先,抽取专利的三大层次和五大属性信息,并建立与功能树之间的一一对应关系,如图3所示。在分功能对应的组件层抽取组件名称及连接关系,在功能元对应的零件层抽取名称、结构特征、材料及连接关系,在部件层抽取名称、结构和位置特征。
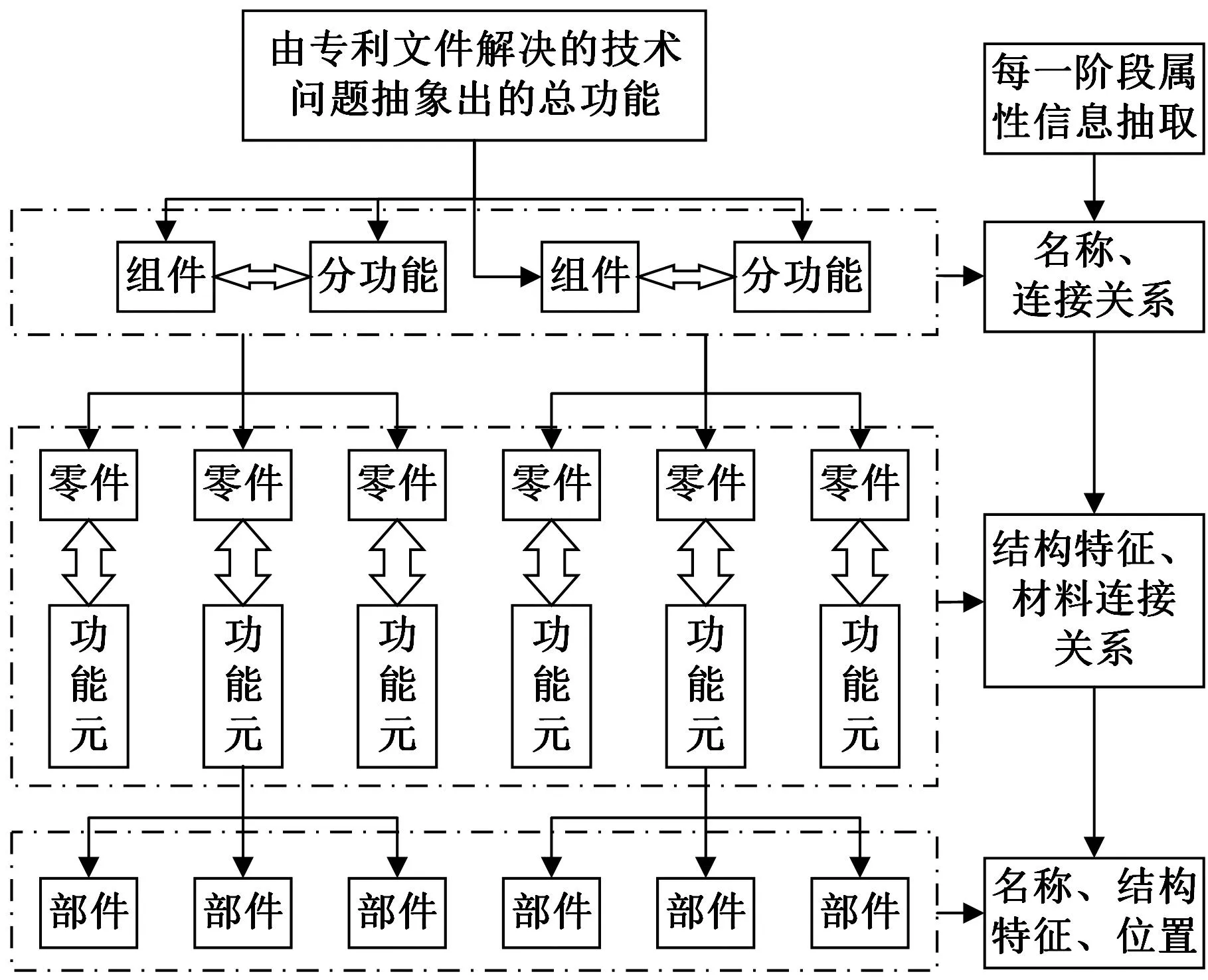
图3 专利权利信息提取图
其次,建立针对目标专利的功能结构图,提取针对专利权利范围的完整信息,如图4所示,其中组件SA用方虚线框表示,每个组件SA内又包含相应的零件SC,零件上需要进一步界定的技术特征用部件SP表示,专利所有必要技术特征在圆形虚线框内,框外超系统(super systems,SS)资源与专利技术特征整体有一个作用关系,最终专利系统对作用物(target)实现所解决的技术问题。
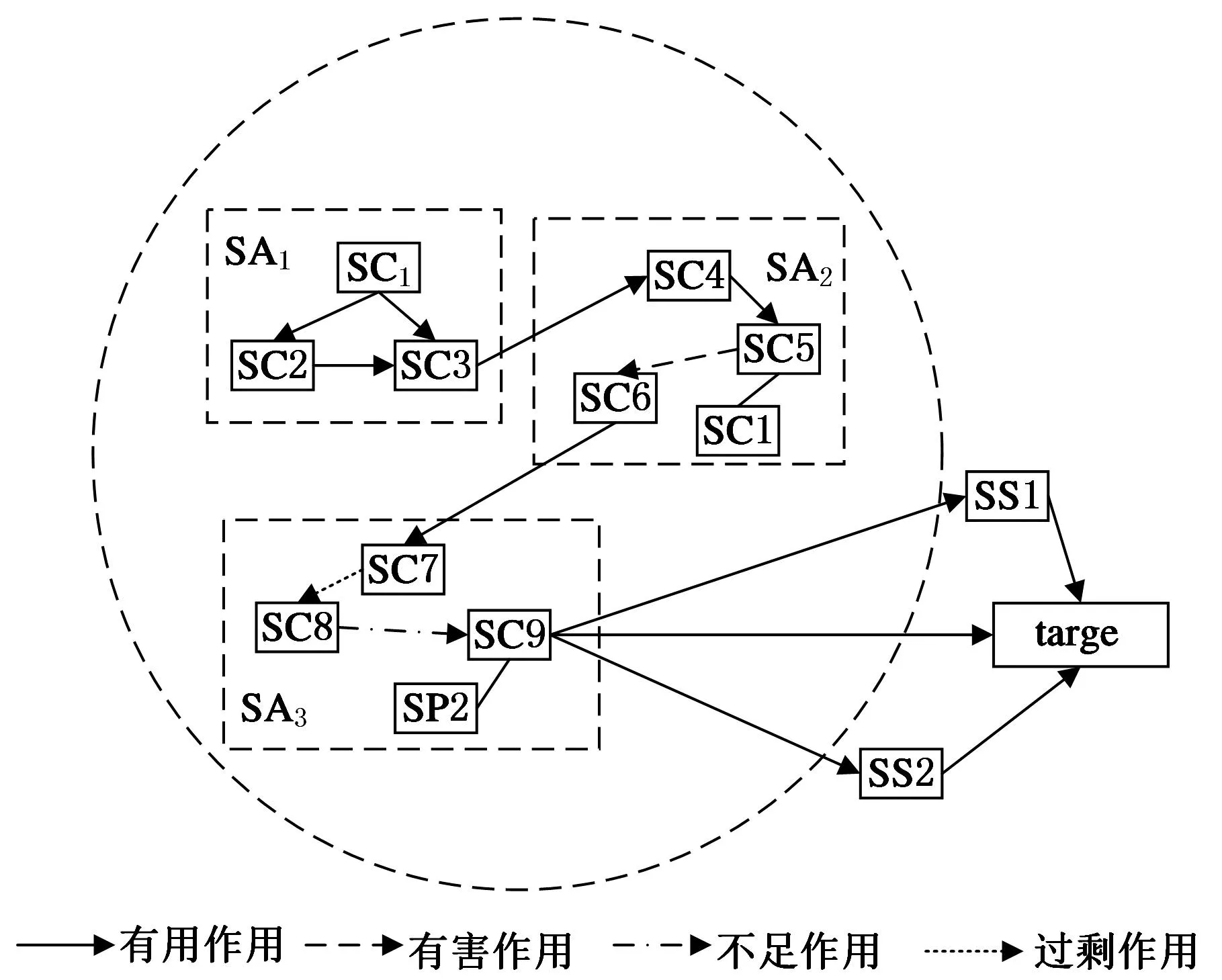
图4 基于功能模型的专利权利范围图构建
2面向专利规避的功能裁剪路径
2.1专利规避原则与功能裁剪
基于侵权判断原则的专利规避设计通常遵循以下三点原则:① 删减必要特征,避免侵犯全面覆盖原则;② 对构成要件进行实质性替换改变,避免侵犯等同原则;③综合分析权利要求书及说明书内容和审查档案,合理利用禁止反悔原则和捐献原则[11-12]。但是适用上述原则进行的规避设计,多依赖于经验,缺乏系统化的方法进行指导。TRIZ理论中的功能剪裁是一种对现有专利方法进行删减替换操作的创新方法,为专利规避设计提供了规范化的路径。
功能裁剪作为TRIZ理论[13-14]中的问题分析工具,通过对产品功能模型的分析,对存在问题的功能元件进行删减,在某些情况下允许在删减系统某些部件的前提下,为解决系统存在问题添加新部件以完成产品系统的改进设计,即其实现的是一个修剪和整理的过程[15]。在功能模型上针对具体的功能元件进行删除、替换等修剪工作,形成问题模型,再用TRIZ方法对修剪后的功能模型进行弥补,使得技术系统结构得到优化。裁剪的过程与专利规避原则具有同样的作用,将其结合对产品功能和结构进行重新架构,可以获得具有操作意义的创新设计路径。
2.2功能裁剪路径
在专利规避原则约束下进行功能裁剪,建立面向不同专利规避原则的规避路径,首先要提取问题功能元或者兴趣功能元,建立最小的功能单元模型,如图5表示,执行元件对目标元件既存在有用作用,又存在问题作用,问题作用包含有害作用、过剩作用和不足作用。
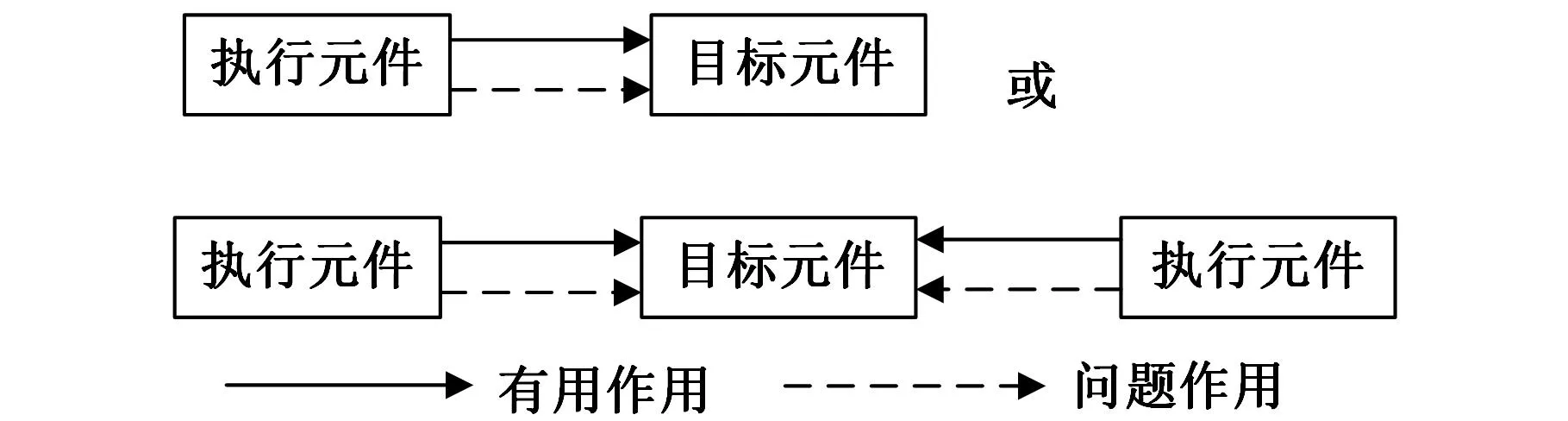
图5 一个功能单元的功能模型
针对一个功能单元的功能模型进行裁剪操作,在不同的侵权原则约束下形成不同的规避路径,为确定问题模型提供不同的设计路径。
对全面覆盖原则的规避路径,如表1所示。对等同原则的规避路径,如表2所示。根据捐献原则及禁止反悔原则规避的路径如表3所示。

表1 基于全面覆盖原则的专利规避路径
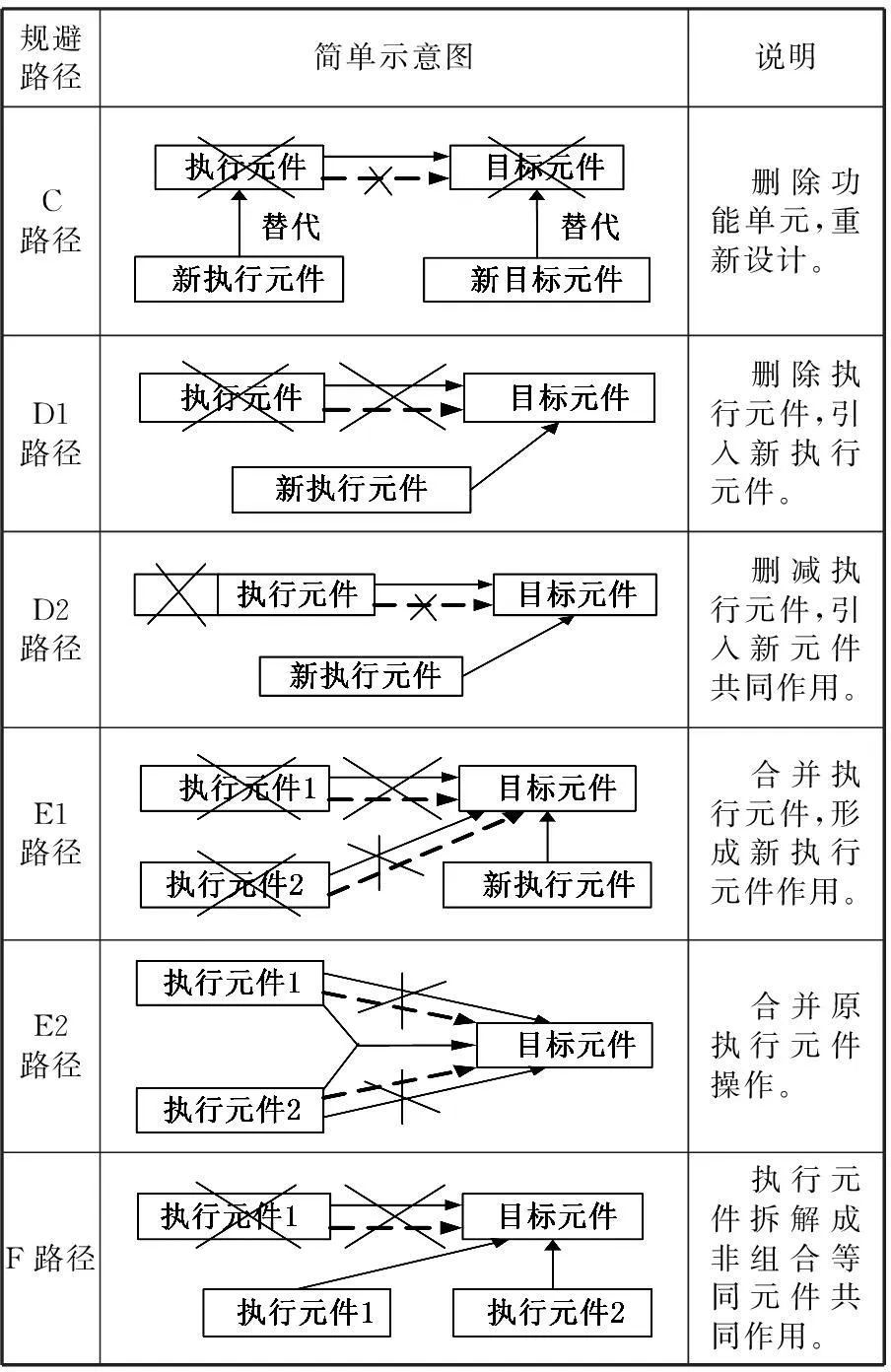
表2 基于等同原则的专利规避路径
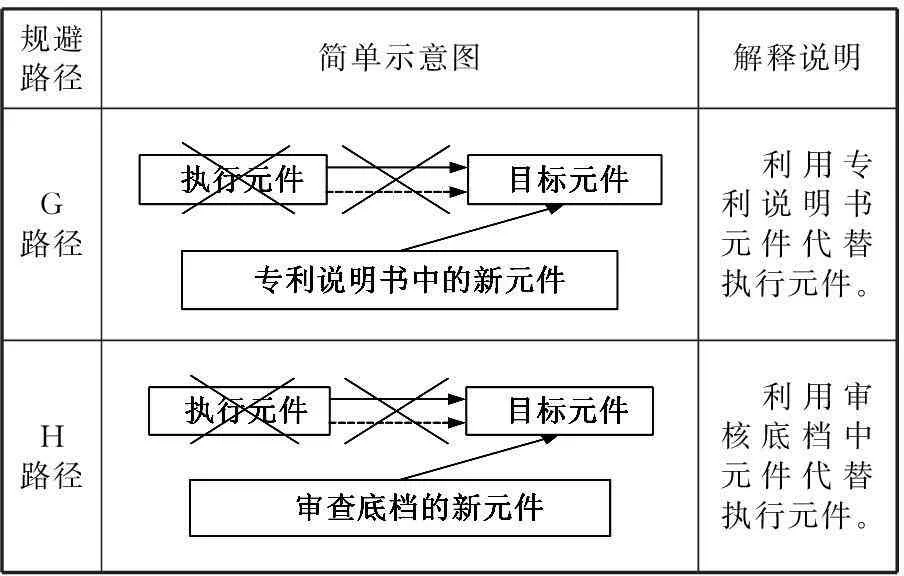
表3 基于捐献原则及禁止反悔原则的专利规避路径
通过将功能裁剪方法与专利侵权判断原则相结合,为专利规避设计提供了具体的方法路径,减少了创新设计的盲目性,应用于设计流程中可提供多种问题模式,求解问题并组合方案可获得既不侵权,又有较高专利性的新解。
2.3面向专利规避的问题功能元识别及裁剪路径选择
面向专利规避的裁剪,其前提是对系统各元件进行功能分析,主要是找出问题功能元,即系统中的有害或不足作用,对其进行改善,其主要步骤如下:
(1)确定专利系统所提供的主功能;
(2)研究组成元件对系统的贡献;
(3)分析系统中的有用及有害关系;
(4)确定冲突、不足作用、过剩作用及有害作用;
(5)分析问题功能元,对其进行改善,可运用上节基于专利规避原则的规避路径进行设计。
在对问题功能元进行改善时按照以下顺序,若方案可行则形成新方案,不可行则选择下一路径:
(1)先删除问题功能组件,即采用路径A;
(2)删除功能构件,其功能由受作用元件自己实现,即采用路径B1;
(3)删除功能构件,其功能由系统内其他元件实现,即依次尝试采用路径B2、E2、F;
(4)删除功能构件,其功能由超系统实现,即依次尝试采用路径G、H、C、D1、D2、E1。
3应用功能裁剪路径的专利规避流程
应用功能裁剪路径进行专利规避设计,重点在于对专利功能模型中的问题功能元选择不同的专利裁剪路径,进行剪裁操作,形成裁剪变体,运用TRIZ理论中的冲突矩阵(40条发明创造原理、39个技术特征)、物质-场分析等内容作为创新工具[16],对裁剪变体进行创新设计,从而获得最优解的新产品设计模型。这种专利规避设计模式具有直观、形象、科学的特点。如图6所示,其设计流程大致可以分为4个阶段:
阶段一,确定规避对象。目的是选取原型专利,作为分析对象,并基于功能模型建立专利权利范围图。
阶段二,确定规避路径,发现问题。选取将功能裁剪与专利规避原则相结合的规避路径,转换并发现新问题。
阶段三,解决规避问题。根据不同的规避路径所得出的问题,选取不同的TRIZ方法解决问题,最后转成具体的技术方案。
阶段四,方案的侵权判定。用专利侵权法律原则以及专利侵权判断流程验证设计方案的可行性。
3.1确定规避对象
根据产品开发的目的,确定专利检索主体及专利数据库,对选定专利数据库进行检索操作,比较常用的是运用关键词或者IPC分类表构筑布尔逻辑检索式进行检索,并依据检索结果进行筛选,选出符合设计意图的专利,确定进行规避操作的专利原形,并在充分挖掘原有专利权利要求信息的基础上,对规避对象建立专利权利信息提取图。
3.2选择专利规避路径,确定规避主体
基于专利权利信息提取图建立功能结构图,形成功能裁剪模型。通过分析模型,确定功能模型中存在的有害功能、过剩功能和不足功能等问题功能元,基于裁剪优先权确定用于功能裁剪的功能组件,然后选取具体的专利规避路径进行裁剪操作,形成功能裁剪变体。判定裁剪变体所对应的新功能模型,若其符合设计要求,则直接转化为产品概念;反之可将转化的新问题作为技术创新设计的突破口,进行下一步规避设计。
3.3解决规避问题
通过上面的步骤实现了对现有专利技术的功能重组,找出专利规避的技术方向,同时将其转化为TRIZ中的标准问题,应用TRIZ作为解决问题和创新设计的有效工具,利用冲突分析或物质-场分析,通过冲突解决原理和标准解,并结合该技术的具体领域进行技术设计确定领域解[17],如图7所示。

图6 专利规避原则与功能裁剪集成的设计流程

图7 基于TRIZ的裁剪变体规避流程
3.4方案的侵权判定
对创新解进行侵权判定,确认专利规避设计是否成功。法律侵权判断原则优先适用全面覆盖原则,即技术方案涵盖了原专利权利要求所记载的全部技术特征即为侵权;如未涵盖全部技术特征,则适用等同原则,判断两者的区别技术特征是否在特征、功能和效果三方面实质相等同。若特征实质等同,则适用禁止反悔原则和捐献原则,判断是否该等同技术特征已经贡献给社会公众,成为现有技术。具体的侵权判断流程如图8所示。
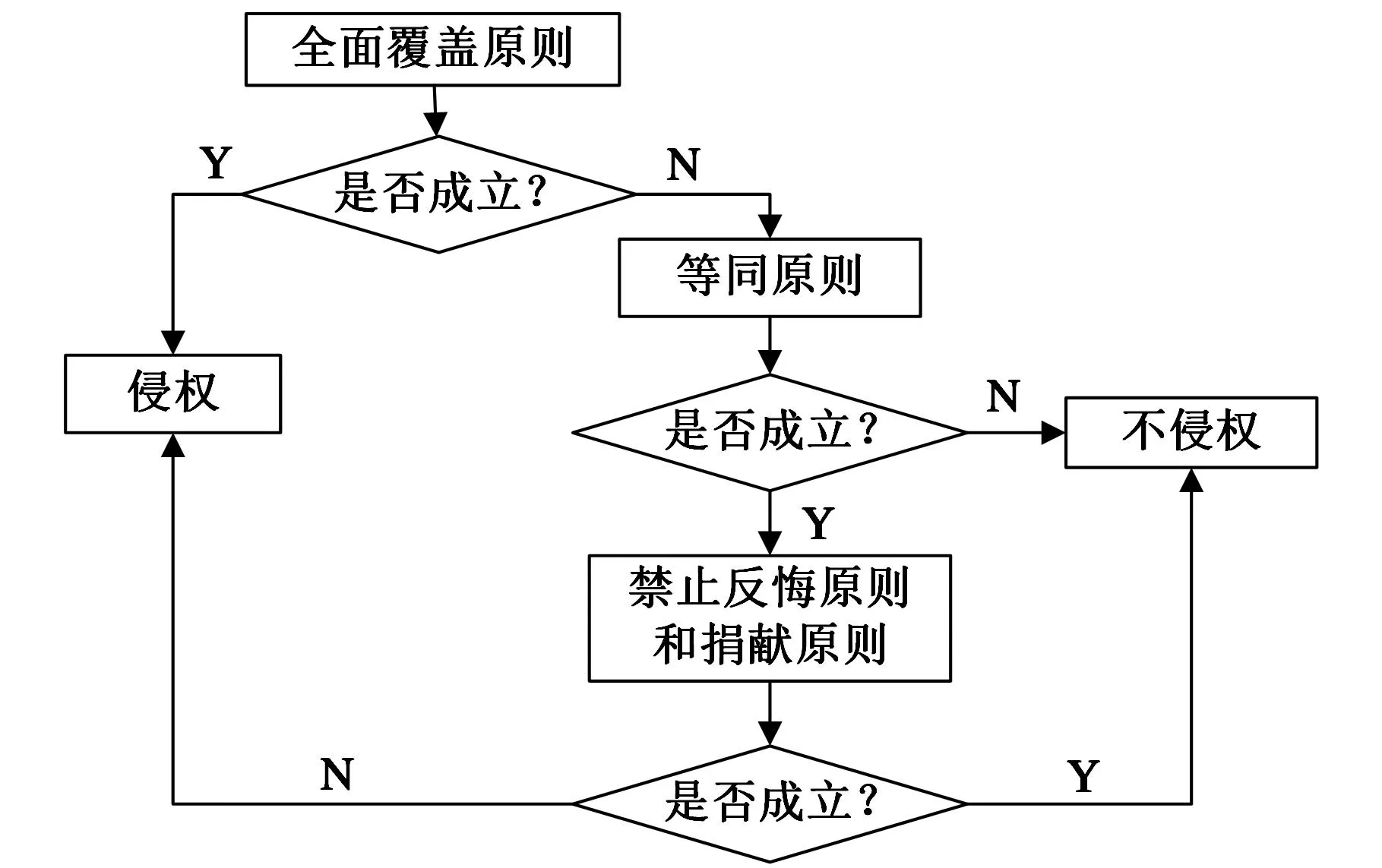
图8 专利侵权判断流程
4案例分析
各种机械管道在我们生活中随处可见,但是随着管道使用时间增长或使用过程受到流体中所含杂质的腐蚀作用,可能导致管道状况恶化,为了确保安全,管道检测显得尤为重要。为适应管道复杂的环境条件,管道机器人的研究为检测工作提供了新的技术手段[18-19]。
4.1确定规避对象
关键词以“管道机器人”和“内径测量”为,在SooPAT专利数据库中进行专利检索,截止2014年11月20日,检索出国内有权专利5项。通过对其摘要进行逐一阅读并分析,筛选出北京石油化工学院CN201320586988的专利(基于位移传感器的管道内径测量装置)作为规避目标专利。
中图分类号:TH122
收稿日期:2014-12-01
基金项目:国家创新方法专项基金资助项目(2013IM030400)
作者简介:李辉,女,1981年生。河北工业大学机械工程学院博士研究生、讲师。研究方向为专利规避、专利组合及创新设计理论研究等。刘力萌,男,1990年生。河北工业大学机械工程学院硕士研究生。赵少魁,男,1990年生。河北工业大学机械工程学院硕士研究生。于菲,女,1986年生。河北工业大学机械工程学院讲师。檀润华,男,1958年生。河北工业大学副校长、教授、博士研究生导师。
在专利CN201320586988中,此装置(图9,图10)主要由主动行走机构(1)、辅助行走机构(2)、传感器机构(3)、灯光视觉机构(4)、传动机构(5)以及电气控制柜组成,其特征在于:主动行走机构(1)和辅助行走机构(2)设置行走轮对机器人中心进行定位,传动机构控制主动行走机构(1)及

图9 检测装置三维视图
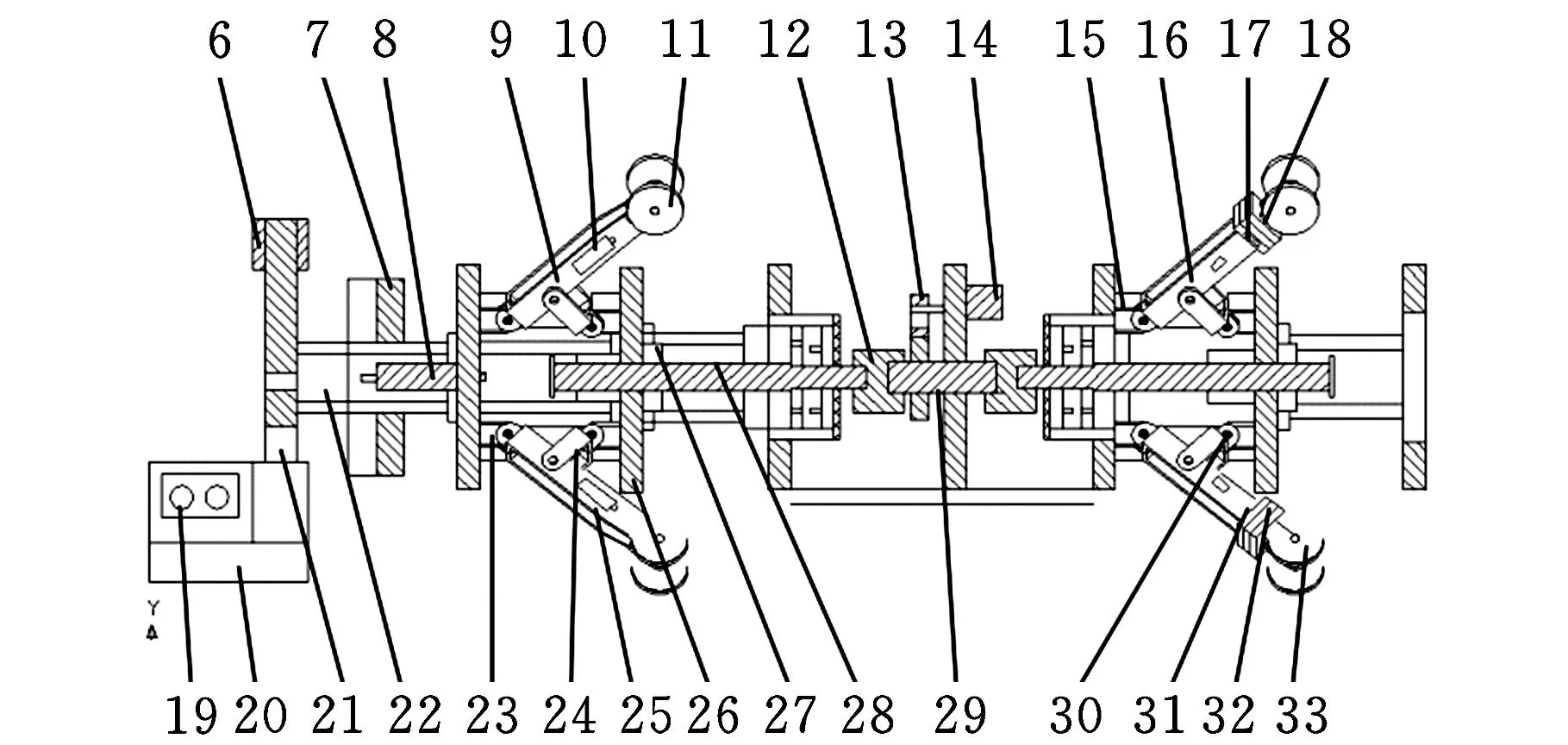
图10 检测装置剖视图
辅助行走机构(2)设置的支撑臂同步打开和收缩,激光位移传感器(19)测量管道内壁径向相对位移、里程轮(33)记录行走里程、压力传感器测量管壁与行走轮间压力,灯光视觉机构(4)观察管道内部环境。分析专利权利信息,建立原专利主要权利信息的抽取图,如图11所示。
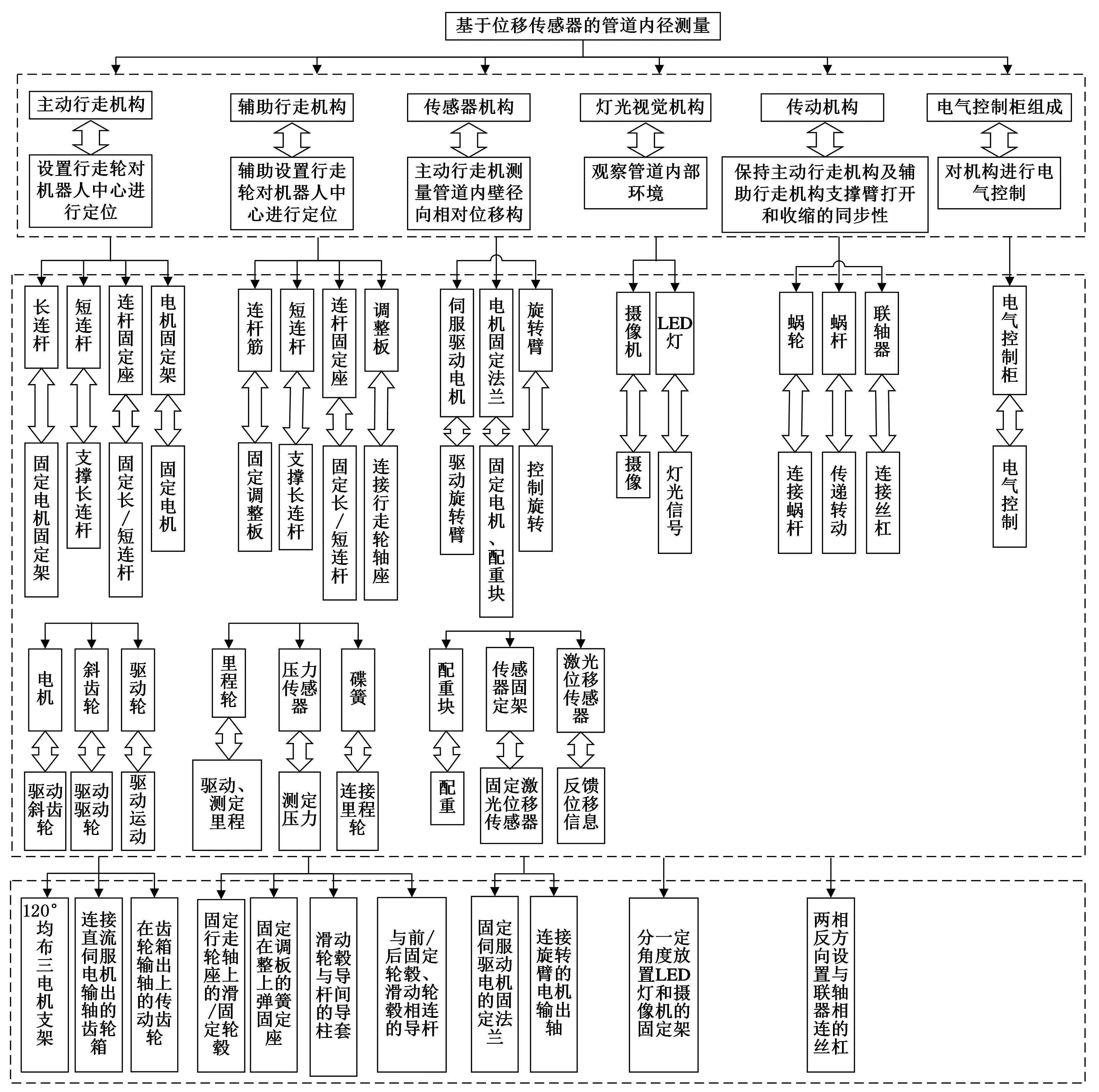
图11 原专利主要权利信息抽取图
4.2选择规避路径
基于原专利权利信息建立系统功能模型,我们可以建立如图12所示的功能结构模型。分析模型,系统的辅助行走功能存在有害作用,该装置的辅助行走机构主要作用为完成支撑臂同步打开和收缩,辅助行走机构(2)由调整板(18)、碟簧(33)、里程轮(34)、行走轮轴座(16)、压力传感器(32)组成。选取功能单元辅助行走机构进行裁剪,辅助行走机构的原理如图13所示。

图12 原专利功能结构模型

1.里程轮 2.调整版 3.碟簧 4.行走轮轴座及传感器 5.管壁内侧 图13 辅助行走机构原理图
对其进行功能分析后发现,由于传感器对功能的实现有延迟,且作用精度无法保证,故而对其进行裁剪,删减执行元件调整板、碟簧、行走轮轴座压力传感器。删减后辅助行走功能无法实现,分析问题后选用D2规避路径,引入新执行元件作用,重新实现相应功能。在对新执行元件进行设计时,需解决以下两种冲突:
其一,设计中遇到的技术冲突。为提高管径的适用范围,须增大轮腿的长度,结果是滑块(弹簧)的行程变大,导致驱动不足或打滑,原专利中运用传感器反馈解决冲突,但精度及反应速度无法保证。
其二,设计中遇到的物理冲突。为保证直道时机器人与管道同轴移动,驱动轮转速须相同,但是,为使机器人被动通过弯道,驱动轮转速又须不同。
4.3基于TRIZ的规避设计
为解决设计中遇到的技术冲突,首先从39个标准工程参数(NO.1~NO.39)中选择确定技术冲突的一对特征参数,它们分别是:
(1)质量提高的参数,即物体产生的有害因素(NO.31);
(2)带来负面影响的参数,即运动物体的长度(NO.3)。
由冲突矩阵的第31行及第29列确定可用发明原理:动态化(NO.15);未达到或超过的作用(NO.16);维数变化(NO.17);变有害为有益(NO.22)。
下面选取NO.15及NO.17两条原理进行设计。
动态化即可增加一个调节电机,把弹簧右端的固定支撑变成可控的移动支撑,在每一个阶段自动调整右端支撑的位置来保证弹簧力,以解决驱动不足或打滑的现象。但是,该方法并没有改变弹簧在轴向的变化量(为了保证弯道的可控性,机器人的轴向尺寸不能太大),而且又增加了一个驱动使系统变得复杂,故非最优方案。
维数变化(多层排列代替单层排列)即可把弹簧直接对轮腿径向变化尺寸的调节改为弹簧先对角度的调节再通过角度的变化转化为径向尺寸的变化。
综合分析两种方法,为节约成本,简化操作,本文最终确定的方案原理如图14所示。

1.里程轮 2.轮腿 3.滑块 4.弹簧 5.管壁内侧 图14 管道检测机器人自适应结构
为解决设计中遇到的物理冲突,选取时间分离原理,即将冲突双方在不同时间段分离:直道时驱动轮转速相同;弯道时,驱动轮转速不同。基于此方法利用棘轮机构将其在时间上进行分离,从而解决了该冲突。形成方案为:当机器人在直管道中行走时,由电机同时控制三个驱动轮使其转速相同,保证机器人能够与管道同轴移动;当需要通过弯道时,由于驱动轮转速不同,故使该控制电机停止工作,利用棘轮特性同时在另一个电机的推(拉)动作用下,保证该机体顺利通过弯道。具体结构如图15所示。

1.棘轮 2.里程轮 3.驱动轮轴 图15 棘轮结构
运用TRIZ解决了上述冲突,主要规避过程如图16所示,本设计弥补裁剪后的影响,形成创造性比较高的新方案,且此方案结构简单,功能作用精度较高,有较好的实际应用价值。
基于TRIZ对裁剪变体进行规避设计,使得原专利中因压力传感器侦测和反馈带来的响应时间延迟及精度问题得到充分弥补,并且由于辅助行走机构由主动反馈方式改为被动响应,减少了响应时间,使得行走动作更为连续有效,而核心行走方式的转变使得裁剪后方案明显有别于原方案,在原专利的基础上形成了具有自主知识产权的基于被动自适应的管道检测机器人,创新方案的功能结构模型如图17所示。
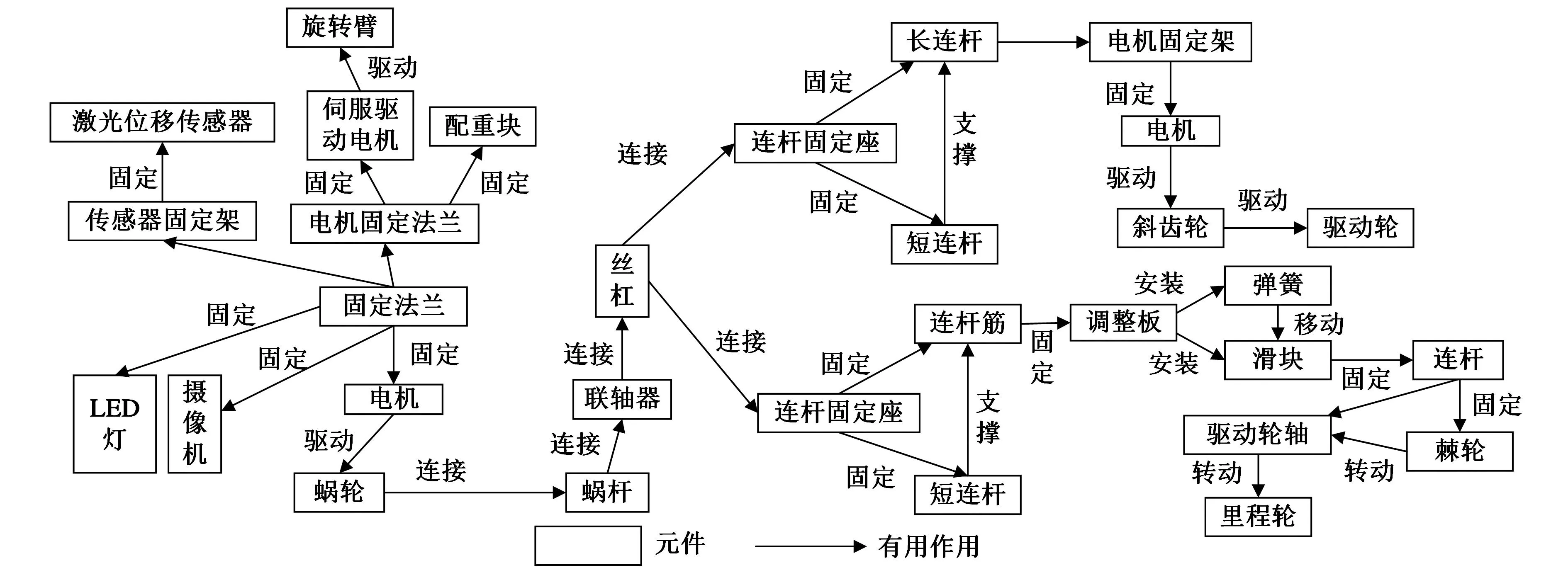
图17 创新方案的功能结构模型
4.4方案的侵权判定
将该方案新的功能结构与已有专利功能结构图对比,新方案对原专利核心技术辅助行走机构反馈机制进行了重新设计,裁剪了原专利存在的问题作用,形成了新的设计方案,依据专利侵权判断流程图进行判定,已成功规避了原专利的保护范围,形成可申请新专利的创新成果。
5结语
面向机械产品专利规避的功能裁剪路径研究以专利侵权判定原则为约束,引入功能裁剪方法形成具体的规避路径,应用于专利规避设计流程时可针对不同裁剪路径下的裁剪变体,形成新的问题,将其转变成TRIZ中的标准问题,进而用相应的TRIZ方法去解决,指导设计人员既绕开现有专利保护范围,又进行持续性创新。最后选择专利规避路径,应用专利规避流程,实现了针对基于位移传感器的管道内径测量装置的创新设计,达到了最初的设计目的,也验证了方案流程的可行性。
参考文献:
[1]雷源忠.我国机械工程进展与展望[J].机械工程学报,2005,45(5):1-11.
Lei Yuanzhong.Progress and Prospect of Mechanical Engineering in China[J].Journal of Mechanical Engineering,2005,45(5):1-11.
[2]骆云中,陈蔚杰,徐晓琳.专利情报分析与利用[M].上海:华东工业大学出版社,2007.
[3]Patrick B, Pinkerton J, Patricia P, et al.Patent Resources Group, Inc. Design around valid US patents[R].Bonita Springs; Patent Resources Group, Inc., 1994.
[4]李宗芳.对中国企业专利战略选择的思考[J].科技情报开发与经济,2005,15(1):170-171.
Li Zongfang.Thinking on the Selection China Enterprise Patent Strategy[J].Sci-Tech Information Development & Economy,2005,15(1):170-171.
[5]黄文仪.专利实务[M].4版.台北:三民书局,2004.
[6]罗炳荣.工业财产权论述:专利侵权与回避设计篇[D].台北:翰蓝图书出版有限公司,2004.
[7]林明宪.系统化专利分析与成果评估与回避设计研究[D].高雄:树德科技大学,2007.
[8]江屏,罗平亚,檀润华,等.基于功能裁剪的专利规避设计[J].机械工程学报,2012,48(11):46-54.
Jiang Ping,Luo Pingya,Tan Runhua,et al.Method about Patent Design Around Based on Function Trimming[J].Journal of Mechanical Engineering,2012,48(11):46-54.
[9]Li Miao, Ming Xinguo, He Lina,et al.A TRIZ-based Trimming Method for Patent Design Around[J].Computer-Aided Design,2014,62(1):20-30.
[10]Caetano C, Davide R. Computer-aided Analysis of Patents and Search for Triz Contradictions[J]. International Journal of Product Development, 2007, 4(1/2): 52-67.
[11]杨萌,郑志柱.专利间接侵权与专利侵权判定原则[J].知识产权,2011,79(4):55-58.
Yang Meng,Zheng Zhizhu.Indirect Patent Infringement and Patent Infringement Determination Principle[J].Intellectual Property Rights,2011,79(4):55-58.
[12]陈胜杰.专利侵权判定浅析[J].日用电器,2012,286(8):10-12.
Chen Shengjie.Patent Infringement Determination is Analysed[J].Household Electrical Appliances,2012,286(8):10-12.
[13]张士林,林岳.TRIZ创新理论研究与理论[M].北京: 华龄出版社,2010.
[14]郑称德.TRIZ理论及其设计模型[J].管理工程学报,2003,17(1):84-87.
Zheng Chengde.Triz Theory and Its Design Model[J].Journal of Industrial Engineering and Engineering Management,2003,17(1):84-87.
[15]韩彦良.基于TRIZ理论功能裁剪的产品创新设计[J].制造业自动化,2013,35(1):150-153.
Han Yanliang.Product Innovation Design Based on Function Trimming of TRIZ[J].Manufacturing Automation,2013,35(1):150-153.
[16]檀润华.TRIZ及应用:技术创新过程与方法[M].北京:高等教育出版社,2010.
[17]王浩伦.基于TRIZ和专利规避设计的产品创新方法[J]组合机床与自动化加工技术,2012,48(11):46-72.
Wang Haolun.A Methodology of Product Innovation Based on TRIZ and Patent Design Around[J].Modular Machine Tool & Automatic Manufacturing Technique,2012,48(11):46-72.
[18]袁寿其,刘厚林.泵类流体机械研究进展与展望[J].排灌机械,2007,25(6):46-51.
Yuan Shouqi,Liu Houlin.Pump Fluid Machinery Research Progress and Prospect[J].Drainage and Irrigation Machinery,2007,25(6):46-51.
[19]曹建树,林立,李杨,等.油气管道机器人技术研发进展[J].油气储运,2013,32(1):1-7.
Cao Jianshu,Lin Li,Li Yang,et al.Oil And Gas Pipeline Robot Technology Research and Development Progress[J].Oil and Gas Storage and Transportation,2013,32(1):1-7.
(编辑郭伟)
猜你喜欢
大经贸(2016年11期)2017-01-06
学理论·下(2016年11期)2016-12-27
现代商贸工业(2016年27期)2016-12-26
商情(2016年40期)2016-11-28
时代金融(2016年23期)2016-10-31
商场现代化(2016年21期)2016-10-21
商场现代化(2016年21期)2016-10-21
课程教育研究·学法教法研究(2016年21期)2016-10-20
今传媒(2016年7期)2016-09-07
商(2016年16期)2016-06-12
