
基于解耦式主动万向脚轮的全向移动机器人设计
2015-12-30 05:14曲乃恒,杨桂林,郑天江
中国机械工程 2015年19期
基于解耦式主动万向脚轮的全向移动机器人设计
曲乃恒1,2杨桂林1郑天江1
1.中国科学院宁波材料技术与工程研究所,宁波,3152012.中北大学,太原,030051
摘要:设计了一种具有运动解耦特性的新型主动万向脚轮,实现了脚轮的转向运动和滚动运动的无耦合独立控制。设计了基于解耦式主动万向脚轮的全向移动机器人,建立了其运动学模型,并通过MATLAB对全向移动机器人进行了运动学仿真。仿真结果表明:基于解耦式主动万向脚轮的全向移动机器人可以实现侧行和原地转向。
关键词:主动万向脚轮;运动解耦设计;全向移动机器人; 运动分析
中图分类号:TP242.6
收稿日期:2015-01-08
作者简介:曲乃恒,男,1989年生。中北大学机械与动力工程学院与中国科学院宁波材料技术与工程研究所先进制造所联合培养硕士研究生。主要研究方向为全向移动机器人。杨桂林,男,1965年生。中国科学院宁波材料技术与工程研究所高级研究员、博士研究生导师。郑天江,男,1984年生。中国科学院宁波材料技术与工程研究所博士。
Design of an Omnidirectional Mobile Robot Based on Decoupled Powered Caster Wheels
Qu Naiheng1,2Yang Guilin1Zheng Tianjiang1
1.Ningbo Institute of Industrial Technology,Chinese Academy of Sciences,Ningbo,Zhejiang,315201
2.North University of China,Taiyuan,030051
Abstract:A novel decoupled powered caster wheel was designed herein, so that the wheel’s steering and rolling motions could be independently controlled. Based on the new wheel design, an omnidirectional mobile robot was developed for indoor applications. Kinematic model of this robot was formulated and verified through the computer by MATLAB. Simulation results show that the omnidirectional mobile robot is able to perform the side-way and spinning motions.
Key words: powered caster wheel; decoupled design; omnidirectional mobile platform; kinematic analysis
0引言
主动万向脚轮式全向移动机器人具有3个平面运动自由度,机动性强、移动灵活性高,适合在室内狭小的工作空间内作业[1-2]。目前,斯坦福大学和南洋理工大学研发的万向脚轮式全向移动机器人的主动万向脚轮在运动过程中存在运动耦合问题,导致运动控制复杂,易于产生滑转、滑移,增加了脚轮的磨损,降低了驱动效率[2-4]。因此,解决主动式万向脚轮的运动耦合问题,成为基于主动万向脚轮式全向移动机器人的技术难题。笔者提出的一种解耦方案实现了主动式万向脚轮的运动解耦,使得主动万向脚轮可以实现转向和滚动的无耦合独立控制。同时,对具有两个解耦式主动万向脚轮的全向移动机器人进行了运动学分析,并对全向移动机器人的侧行和原地转向功能进行了运动学仿真。
1解耦式主动万向脚轮设计
1.1脚轮的传动方案设计
主动式万向脚轮通常由2个电机(1个电机驱动轮子转向,1个电机驱动轮子滚动)驱动。为了避免脚轮运动过程中电机的接线产生绕线问题,通常将2个电机固定在基座上,这样脚轮在转向时就会产生脚轮的转向运动和滚动运动的耦合问题。为了解耦,笔者在脚轮的运动传动系统中引入了一个具有2个自由度的行星排,当转向电机带动轮子转向时,转向电机将输出两部分运动:一部分运动用于轮子转向;另一部分运动将传递到齿轮排中,用于脚轮运动解耦。这样在设计过程中,就可以通过设置适合的行星排参数,解决脚轮的运动解耦问题。
如图1所示,解耦式主动万向脚轮的传动系统由2个驱动电机、1个轮子、4套皮带轮机构、1套锥齿轮和1套齿轮排机构组成。解耦式主动万向脚轮在运动过程中,驱动电机输出的运动依次通过带轮1、太阳轮、行星轮、锥齿轮,将运动传递到轮子上。转向电机输出的运动分为两部分:一部分通过带轮3传递到齿轮排中,进行脚轮运动解耦;另一部分通过带轮5带动脚轮的转向架进行转向。为了避免移动机器人的奇异问题,脚轮与移动机器人装配点到轮子接地点的水平距离应等于轮子半径R[5]。

图1 解耦式主动万向脚轮传动系统图 [3]
1.2脚轮的运动学分析
脚轮的运动分析是为了得到移动机器人的输入(驱动电机和转向电机的输出转速)和输出(轮子的滚动和转向速度)之间的关系,同时也可进一步解释脚轮的解耦传动原理。主动式万向脚轮的解耦系统中,nd为驱动电机的转速,ndr为驱动电机传递给轮子的转动速度,ns为转向电机的转速,nsr为轮子转向时派生出的滚动角速度,ij(j=1,2,3,4)为第j组带轮的传动比,ib为锥齿轮1、2的传动比,其值等于锥齿轮1的齿数zb1和锥齿轮2的齿数zb2之比,λ为齿轮排的参数,其值等于环形齿轮的齿数zr和太阳轮的齿数zs之比。脚轮的转向运动是通过转向电机实现的,转向电机在输出一个转向角速度nws的同时,会给脚轮引进一个附加的滚动角速度nsr,此时,轮子滚动的速度为
nr=ndr+nsr
(1)
实际运动过程中,脚轮的转向速度为
nws=ns/i3
(2)
脚轮转向过程中派生出的轮子的滚动速度为
nsr=-ns/(ibi3i4)
(3)
驱动电机传递给轮子的驱动速度为
(4)
由式(1)~式(4)整理得轮子的滚动速度:
(5)
由式(5)可以看出,当λi3-(1+λ)i2=0时,即可消除脚轮转向对轮子滚动产生的干扰。因此,在进行脚轮运动传动系统设计过程中,行星齿轮排中太阳轮和环形齿轮的传动比满足λ=i2/(i3-i2)=zr/zs,即可消除脚轮转向运动过程中所存在的运动耦合问题。
1.3脚轮的结构设计
解耦式主动万向脚轮如图2所示,解耦式主动万向脚轮由2个驱动电机、1个行驶轮、4套皮带轮机构、1套锥齿轮和1套行星齿轮排机构组成。为了防滑,提高轮子抗磨损能力,选酚醛树脂作为脚轮的材料。轮子的偏置b=50mm,轮子的半径R=50mm,采用相同型号的驱动电机和转向电机。脚轮传动系统中,皮带轮1的传动比i1=2,皮带轮2的传动比i2=3,皮带轮3的传动比i3=4,皮带轮4的传动比i4=1,锥齿轮的传动比ib=1,齿轮排的解耦系数λ=3。

图2 解耦式主动万向脚轮
2全向移动机器人的方案设计
2.1移动机器人的运动学分析

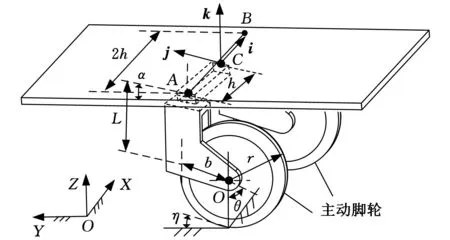
图3 全向移动机器人模型简化图(局部)
根据速度在刚体之间的传递关系,可以得到移动机器人几何中心的速度:


(6)
(7)
移动机器人在C点的角速度和线速度可以表示为
(8)

(9)
将式(6)、式(7)代入式(9)得


(10)


(11)
vC+Rωsinα1i+(Rcosα1-h)ωj=

(12)
vC+Rωsinα2i+(Rcosα2+h)ωj=

(13)
按照并联机构的建模方法进行整理得逆向运动学模型:
(14)

由式(2)得移动机器人实际运动过程解耦式主动万向脚轮的转向电机的转向角速度:
(15)
由式(5)得移动机器人实际运动过程解耦式主动万向脚轮的驱动电机的角速度:
(16)
由式(14)~式(16)得移动机器人的各脚轮的控制电机的转速与移动机器人的速度的关系:
(17)
式中,nd1、nd2分别为第1个、第2个主动万向脚轮的驱动电机的转速;ns1、ns2分别为第1个、第2个主动万向脚轮的转向电机的转速。
2.2全向移动机器人的结构设计
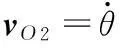
基于解耦式主动万向脚轮的全向移动机器人共有6个轮子,2个解耦式主动万向脚轮置于机器人底盘的中间位置,另外4个万向脚轮用于提高机器人的承载能力。6个脚轮对称地布置在长方形全向移动机器人的内侧,形成一个长方形布置,如图4所示。
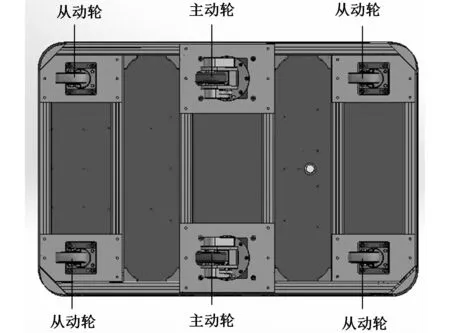
图4 全向移动机器人的模型
3全向移动机器人运动学仿真

3.1移动机器人的直接侧行功能仿真
传统的移动机器人不具有直接侧行功能,其要想实现直接侧行运动,必须先进行转向运动,然后再进行相应的移动,整个侧行运动需要一个转向运动作为过渡,因此其运动过程是不连续的。基于主动万向脚轮式全向移动机器人在进行侧行运动时,脚轮能够边走边转,保证机器人在侧行过程中不需要转向,直接进入侧行状态,使得移动机器人的侧行运动过程变得连续。
基于主动脚轮式全向移动机器人在进行侧行运动时,脚轮的运动过程可以分为两个阶段:第一个阶段,脚轮边走边转,以保证移动机器人的侧向移动;第二个阶段,脚轮进入稳定状态,脚轮的转向角速度为0,只存在一个驱动角速度,以保证机器人侧向移动。如图5所示,我们将移动机器人置于全局坐标系OXY中,移动机器人的初始位置坐标设为(0.1m,0.15m,0),移动机器人的正方向为Y轴正方向。

图5 机器人侧行仿真结果

图6 机器人侧行仿真数据

3.2移动机器人的原地转向功能仿真
移动机器人的转向功能是机器人可在任意时刻进行原地转向,而车体的位置不发生变化。基于主动脚轮式全向机器人在进行原地转向时,脚轮的运动过程可以分为两个阶段:第一个阶段,脚轮边走边转,以保证移动机器人的转向角速度;第二个阶段,脚轮进入运动稳定状态,机器人以恒定的转向角速度进行原地转向。我们将移动机器人置于全局坐标系OXY中,如图7所示,移动机器人的初始状态的位置坐标设为(0.25m,0.25m,0),移动机器人的正方向为Y轴正方向。
(a)机器人初始位姿(b)机器人中间位姿

(c)机器人1s末的位姿 图7 机器人原地转向仿真结果

图8 机器人原地转向仿真数据
置没有发生变化,移动机器人的几何中心的速度vx=vy=0,以ω=4rad/s的角速度原地转向,此时两个轮子的速度大小相等,方向相反。
4结语
解耦式主动万向脚轮实现了轮子绕水平轴和垂直轴旋转时的解耦,降低了控制难度,提高了驱动效率。2个解耦式主动万向脚轮的全向移动机器人具全向移动性,可以在室内狭小的工作空间内灵活移动。为室内作业的移动机器人提供一个理想的解决方案。
参考文献:
[1]HolmbergR,OussamaK.DevelopmentandControlofaHolonomicMobileRobotforMobileManipulationTasks[J].TheInternationalJournalofRobotics, 2000, 19: 1066-1074.
[2]LiYuanping.SlipModellingEstimationandControlofOmnidirectionalWheelMobileRobotswithPoweredCasterWheels[D].Singapore:NationalUniversityofSingapore, 2009.
[3]蒋林. 全方位移动操作机器人及其运动规划与导航研究[D]. 哈尔滨:哈尔滨工业大学,2008.
[4]YangGuilin,LiYuanping,TaoMingLim,etal.DecoupledPoweredCasterWheelforOmnidirectionalMobilePlatforms[C]// 9thConferenceonIndustrialElectronicsandApplications(ICIEA),IEEE.Hangzhou, 2014:954-959.
[5]OetomoD,LiYuanping,CheeWangLim,etal.OmnidirectionalMobileRobotswithPoweredCasterWheels:DesignGuidelinesfromKinematicIsotropyAnalysis[C]//2005IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems.Edmonton,Alta., 2005:3034-3039.
[6]CraigJJ. 机器人学导论[M].贠超,译. 北京:机械工业出版社, 2006.
[7]YiBJ,KimWK.TheKinematicsforRedunantlyActuatedOmnidirectionalMobileRobots[J].JournalofRoboticSystems, 2002, 19(6):255-267.
(编辑张洋)
