
不同收放速度对海上钻机收放系统影响分析
2015-12-30 05:14金永平,万步炎,刘德顺等
中国机械工程 2015年19期
不同收放速度对海上钻机收放系统影响分析
金永平1万步炎2刘德顺1,2彭佑多2
1.中南大学,长沙,4100832.湖南科技大学海洋矿产资源探采装备与技术湖南省工程实验室,湘潭,411201
摘要:以深海钻机收放系统为研究对象,通过建立计入海水阻力的收放系统动力学模型,研究了不同收放速度对收放系统特性的影响。研究结果表明:受海水阻力的影响,钻机在入水前后,摆动角度和脐带缆张力均存在较大差异,海水阻力对两者具有显著的抑制效果。同时,随着下放速度的增大,钻机的摆动幅值和脐带缆张力的变化幅值将不断减小;随着回收速度的增大,钻机的摆动幅值将不断减小,脐带缆张力的最大值将不断增大。
关键词:海上钻机;收放系统;动力学模型;特性分析
中图分类号:TH113.2
收稿日期:2014-12-29
基金项目:国家高技术研究发展计划(863计划)资助项目(2012AA091301);湖南省科技重大专项资助项目(2014FJ1004);湖南省自然科学省市联合基金资助项目(2015JJ5029)
作者简介:金永平,男,1984年生。中南大学机电工程学院博士研究生。主要研究方向为海洋资源开发技术与装备、机械系统动力学。发表论文10余篇。万步炎,男,1964年生。湖南科技大学海洋矿产资源探采装备与技术湖南省工程实验室教授、博士研究生导师。刘德顺,男,1962年生。中南大学机电工程学院教授、博士研究生导师,湖南科技大学海洋矿产资源探采装备与技术湖南省工程实验室教授、博士研究生导师。彭佑多,男,1965年生。湖南科技大学海洋矿产资源探采装备与技术湖南省工程实验室教授、博士研究生导师。
Analyses of Launch & Recovery System of Seafloor Drill under Different
Launching and Recovering Velocities
Jin Yongping1Wan Buyan2Liu Deshun1,2Peng Youduo2
1.Central South University,Changsha,410083
2.Hunan Province Engineering Laboratory of Marine Mineral Resources Exploration Equipment
and Technology,Hunan University of Science and Technology,Xiangtan,Hunan,411201
Abstract:A launch & recovery system of a seafloor drill was chosen as the study object, and the dynamics model was established herein,that considered the influences of the seawater resistance for launch & recovery system of seafloor drill. The dynamic characteristic of launch & recovery system of seafloor drill was analyzed under different launching and recovering velocities. The research results show that there are significant differences in the pendulum angles of the seafloor drill and the tension of the umbilical cable for different stages. The seawater resistance has obvious inhibition effects on reducing the erratic fluctuation of the pendulum angles of the seafloor drill and the tension of the umbilical cable. At the same time, the pendulum angles of the seafloor drill and the tension of the umbilical cable are decreased along with the increase of the launching velocity. As the increasing of recovering velocity, the pendulum angles of the seafloor drill will decrease, while the maximum value of the tension of the umbilical cable will increase.
Key words: seafloor drill; launch & recovery system; dynamics model; characteristic analysis
0引言
深海钻机是开展海洋地质及环境科学研究、进行海洋资源勘探和海底工程地质勘察所必备的关键技术装备[1-3]。受波浪、海风和海流的影响,母船将发生复杂的摇荡运动。母船的摇荡通过脐带缆传递到深海钻机上,引起深海钻机的摇荡。这将导致深海钻机在入水前可能与母船后甲板发生碰撞,刚入水后与母船尾部发生碰撞,在着底前偏离预先指定的着底位置。同时,受深海钻机摇荡的影响,脐带缆将产生紧张和松弛的交替变化,从而引起脐带缆张力的大幅度振动,使得脐带缆因受频繁的冲击变载荷而失效断裂[4-5]。
现有的海上收放系统研究大多采用规则波作为外部激励,且所述的收放作业主要集中在海面以上,如Schellin等[6]建立了包含船体纵荡、垂荡和纵摇的浮式吊杆起重机的三维模型,采用周期性的简谐波作为外部激励对该模型进行了分析,研究表明,吊物的摆动对船体的运动影响较小。Chin等[7]通过建立船用起重机收放系统的三维非线性模型,来研究作用在起重臂端的直接激励和参数外部激励对起重机动态特性的影响。Masoud等[8]、Hanspeter[9]建立了船用起重机收放系统动力学模型,研究了激励频率、吊索长度等对吊物动态响应的影响以及防摆控制策略。王学林等[10]建立了锚泊起重船的动力学模型,分析了起重船在规则波浪激励下吊重的摆动特征,结果表明,当外部波浪频率趋近于吊重特征频率时,吊重会发生大的晃动。上述文献所述的收放作业主要集中在海面以上,没有涉及海水阻力对收放系统动态特性的影响,同时,采用规则波作为外部激励会使整个仿真分析结果与实际的海上收放作业存在较大差异,而对于不同收放速度对收放系统动态特性的影响的研究更鲜见文献报道。由于本文所述的深海钻机需下放至深海海底进行勘探作业,同时也为了更加贴切实际的海上作业环境,本文在建立深海钻机收放系统动力学模型时,采用不规则波浪作为外部激励,同时考虑海水阻力对整个收放系统的影响,这就使得所建立的深海钻机收放系统动力学模型与实际的深海钻机收放系统更加吻合,分析结果更有意义。
1深海钻机收放系统模型
1.1收放系统描述
深海钻机收放系统主要由母船、海洋绞车、脐带缆、收放架、深海钻机等部分组成。本文在建立深海钻机收放系统动力学模型过程中,作了如下假设:①忽略脐带缆的质量和弹性变形;②收放架看作刚体,不考虑其弹性变形。
深海钻机收放系统如图1所示,其中,坐标系O0x0y0z0为惯性坐标系,Oxyz为固定在母船上的随船坐标系,坐标系OAxAyAzA固定在收放架底端两平行旋转轴的中点A处,且OAxAyA平面和OAxAzA平面分别与随船坐标系Oxyz中的Oxy平面和Oxz平面重合,坐标系OBxByBzB固定在收放架滑轮吊点B上,该坐标系与惯性坐标系平行。设A点至随船坐标系Oxyz原点的距离为LOA,收放架与x轴正方向的变幅角为α,收放架底端两平行旋转轴的中点位置A至滑轮吊点B的距离为LAB,滑轮吊点B至深海钻机重心G的脐带缆的长度为l。深海钻机重心G相对于惯性坐标系Oxyz中Oyz平面和Oxz平面的摆动角分别为γ和δ。本文主要研究不规则波浪激励对母船升沉运动、横摇、纵摇的影响,并在该影响下研究不同收放速度对深海钻机收放系统动态特性的影响。

图1 深海钻机收放系统示意图
1.2波浪模型
波浪运动的波面方程可描述为
(1)
式中,ζi为波浪的波幅;εi为波浪的随机相位角,在0~2π中随机分布;ωi为波浪的圆频率;ki为波数;χ为波浪的浪向角;n为基本波数。
波幅ζi由波能谱S(ω)表示为
(2)
则式(1)可变为
cos(kixcosχ-kiysinχ-ωit-εi)
(3)
本文采用的波能谱为P-M谱,其表达式为
(4)
式中,H1/3为波浪的有义波高。
1.3母船运动与外部载荷
根据文献[11]可知,船舶在波浪中的升沉、横摇和纵摇运动的微分方程可表示为
(5)
式中,mship、Δmzz分别为船舶质量和船舶升沉运动附加质量;Jφφ、ΔJφφ分别为横摇惯性矩和横摇附加惯性矩;Jθθ、ΔJθθ分别为纵摇惯性矩和纵摇附加惯性矩;A1z~A5z为船舶升沉运动流体动力系数;B1φ为横摇阻尼力矩系数;B2φ、B3φ为横摇恢复力矩系数;C1θ~C5θ为船舶纵摇流体动力系数;Fz、Mφ、Mθ分别为升沉运动波浪干扰力、横摇和纵摇运动波浪干扰力矩。
式(5)中的各系数可根据文献[12-13]的经验公式求得。
规则波可以近似看成微幅谐振波,表示为时间和频率的正弦或余弦函数。在随船坐标系下,在点(x,y,z)上的动压力可表示为
Δp(x,y,z)=-ρge-kzζ(x,y,t)
(6)
式中,ρ为海水密度;g为重力加速度;k为系数。
根据Froude-Krylov假设,作用在母船上的波浪干扰力和干扰力矩分别为
(7)
式中,V′为母船水面下的体积。
将式(6)代入式(7),并将母船简化为箱型结构,可得波浪干扰力和干扰力矩:
(8)
式中,L、B、T分别为母船的长度、宽度和吃水深度。
1.4深海钻机收放系统动力学方程
固定在母船上的随船坐标系Oxyz相对于惯性坐标系O0x0y0z0的变换矩阵为
T=T(x,y,z)R(x,φ)R(y,θ)=


(9)
则收放架滑轮吊点B的位置可表示为
(10)
深海钻机重心G的位置可表示为
(11)
式中,z、φ、θ、γ、δ和l为时变参数。
假定收放架变幅角度α为定值,将式(11)对时间求导可得深海钻机重心G在x、y、z三个方向上的速度:
(12)
则深海钻机动能为







(13)

式中,m为海底钻机的质量。
深海钻机势能为
Ep=mg(z+LOAsinθ-LABcosαsinθ-
LABsinαcosθcosφ-lcosγcosδ)
(14)
根据拉格朗日方程可得收放系统的整体动力学方程式:


(15)








(16)





(17)
深海钻机收放系统所受的广义力主要为海水阻力,其表达式为
(18)
式中,Cx、Cy、Cz分别为深海钻机在x、y、z三个方向上运动的阻力系数;Sx、Sy、Sz分别为深海钻机在x、y、z三个方向上阻力面的面积;d为脐带缆的直径;Ct、Cn分别为脐带缆的切向阻力系数和法向阻力系数。
1.5脐带缆张力响应
将式(12)对时间求导可得深海钻机重心G在空间x、y、z三个方向上的加速度为
(19)
在深海钻机入水之前,由于深海钻机未与海水接触,因此钻机没有受到海水阻力的影响,此时深海钻机的运动可表示为
(20)
式中,FT为脐带缆的张力。
由式(20)可得深海钻机在入水前脐带缆张力:

(21)
当深海钻机入水后,海水阻力开始对钻机的运动产生抑制作用,此时深海钻机的运动可表示为
(22)
式中,V为深海钻机的体积。
由式(22)可得深海钻机在入水后脐带缆张力:



(23)
2仿真结果与分析
本文以某考察船为母船,综合式(1)~式(23),建立波浪、母船运动以及深海钻机收放系统动力学模型,并在Simulink环境下进行仿真分析,本文模拟的海况为4级海况,该海况对应的有义波高为2.5m,平均周期为6s,收放系统主要参数如表1所示。
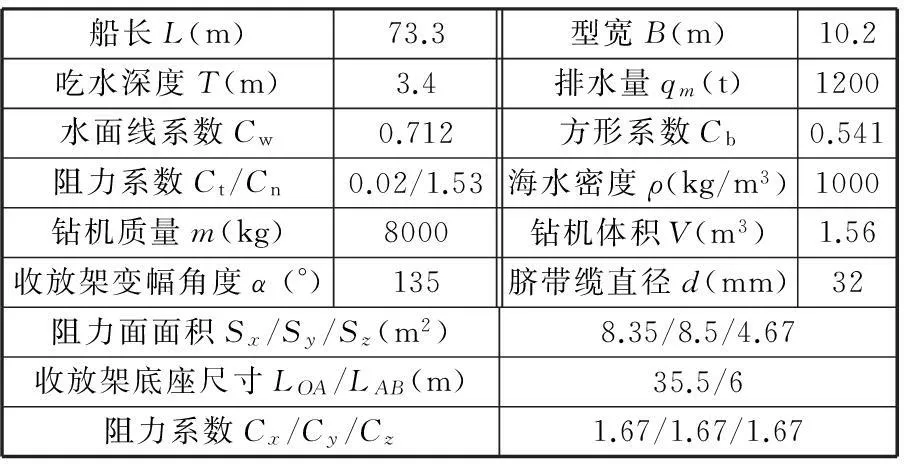
表1 收放系统主要参数
在深海钻机下放和回收过程中,母船通过动力定位固在指定海面区域,因此,仿真时可将母船x方向前进速度设为0,同时将波浪的浪向角χ设为30°。当给定收放架变幅角度α为135°时,海平面至母船上收放架滑轮吊点B的高度约为8m。由于本文所述的深海钻机需下放至海底进行勘探作业,因此,分析中设深海钻机入水前的最大脐带缆长度为8m,深海钻机入水后其下放最大海水深度为100m(或钻机回收时的起始深度为100m)。
2.1母船运动响应计算结果与分析
图2所示为4级海况下母船升沉、横摇和纵摇的响应曲线。从图2可以看出,在不规则波浪激励下母船将产生不规则的升沉、横摇和纵摇响应,其中,母船升沉运动响应幅值变化范围为-241~236mm。母船横摇响应幅值变化范围为-0.068~0.059rad。母船纵摇响应幅值变化范围为-0.027~0.028rad。与4级海况的有义波高相比,母船升沉运动响应幅值约为有义波高的0.191倍。对比图2b、图2c可知,在不规则波浪激励下,母船横摇的变化幅值较母船纵摇的变化幅值大,这主要是由于波浪运动方向与母船的首尾轴线存在一定的角度(浪向角χ=30°)以及母船长度较母船宽度大,从而使得母船横摇的变化幅值较母船纵摇的变化幅值大。

(a)升沉运动响应曲线

(b)横摇响应曲线

(c)纵摇响应曲线 图2 4级海况下母船升沉、横摇和纵摇响应曲线
2.2不同下放速度对深海钻机动态特性的影响

图3 下放速度为0.5m/s时的深海钻机摆角δ和γ
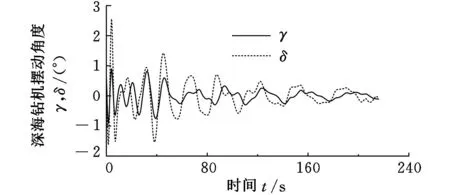
图4 下放速度为1.0m/s时的深海钻机摆角δ和γ
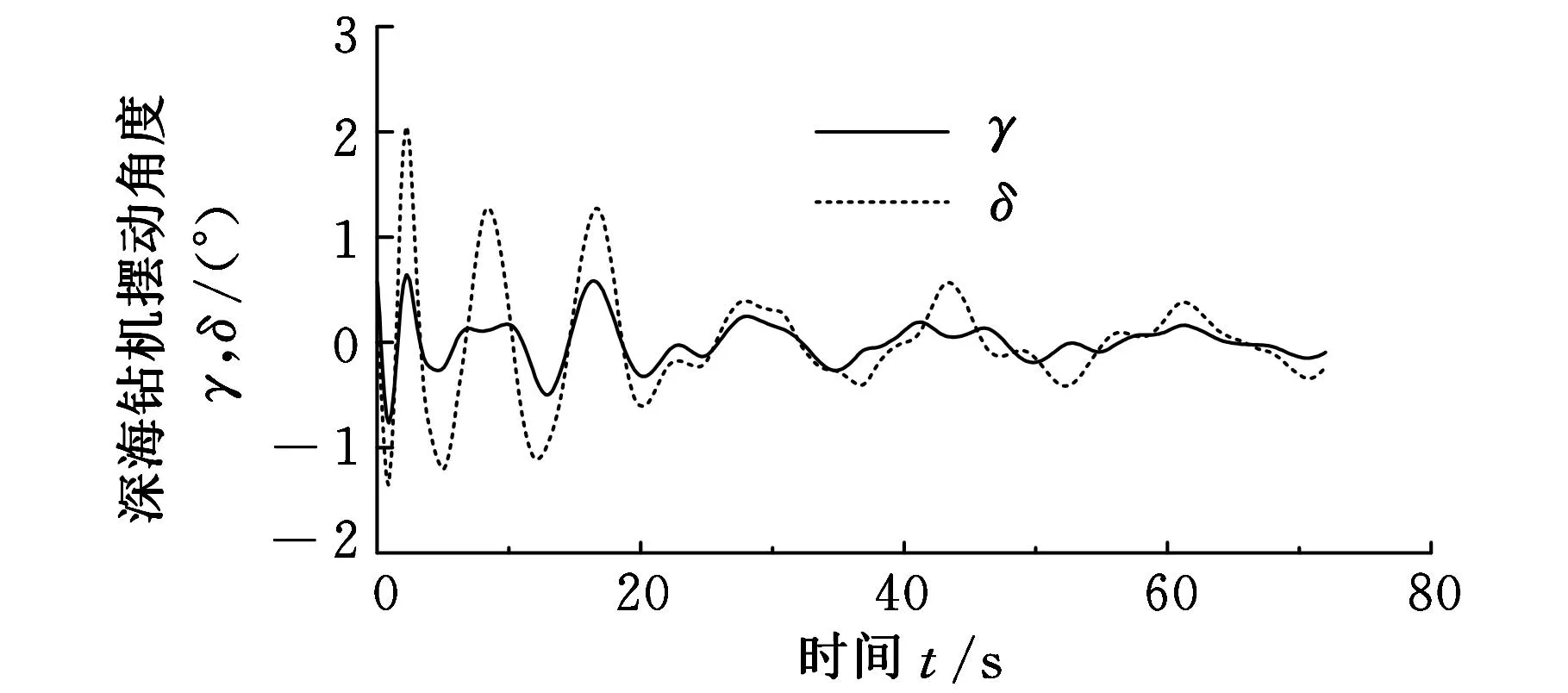
图5 下放速度为1.5m/s时的深海钻机摆角δ和γ
图3~图5所示不同下放速度时深海钻机摆角γ和δ的动态响应,可以看出,深海钻机入水前的摆动幅值明显大于入水后的摆动幅值,即海水阻力对钻机的摆动状况具有明显的抑制作用。同时,随着下放速度的不断增大,深海钻机的摆动幅值将不断减小,钻机的摆动周期将不断增大。
图6~图8所示为不同下放速度的深海钻机脐带缆张力响应曲线,由图可知,在深海钻机入水前与入水后,脐带缆张力的变化幅值存在较大差异,由此可见,海水阻力对深海钻机脐带缆张力变化同样具有较大的抑制作用。同时,进一步对比3个分图可知,随着下放速度的不断增大,深海钻机脐带缆张力变化幅值将不断减小,脐带缆张力变化幅值的减小可以有效改善脐带缆的力学性能,避免因受过大的冲击变载荷而失效断裂。
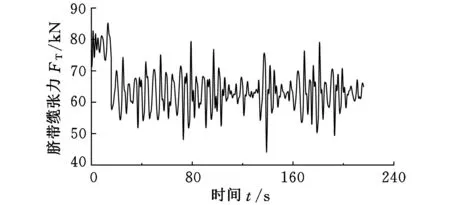
图6 下放速度为0.5m/s时的深海钻机脐带缆张力
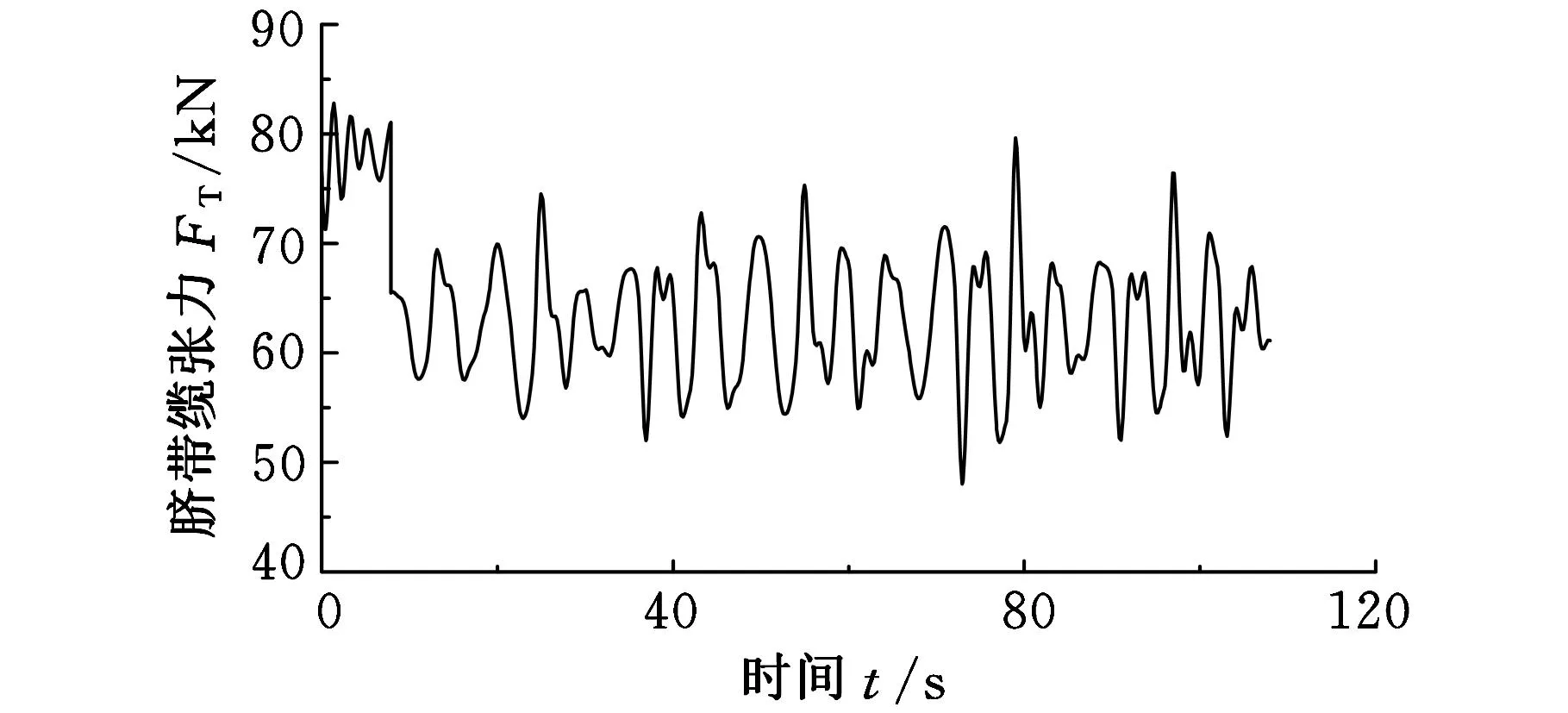
图7 下放速度为1.0m/s时的深海钻机脐带缆张力
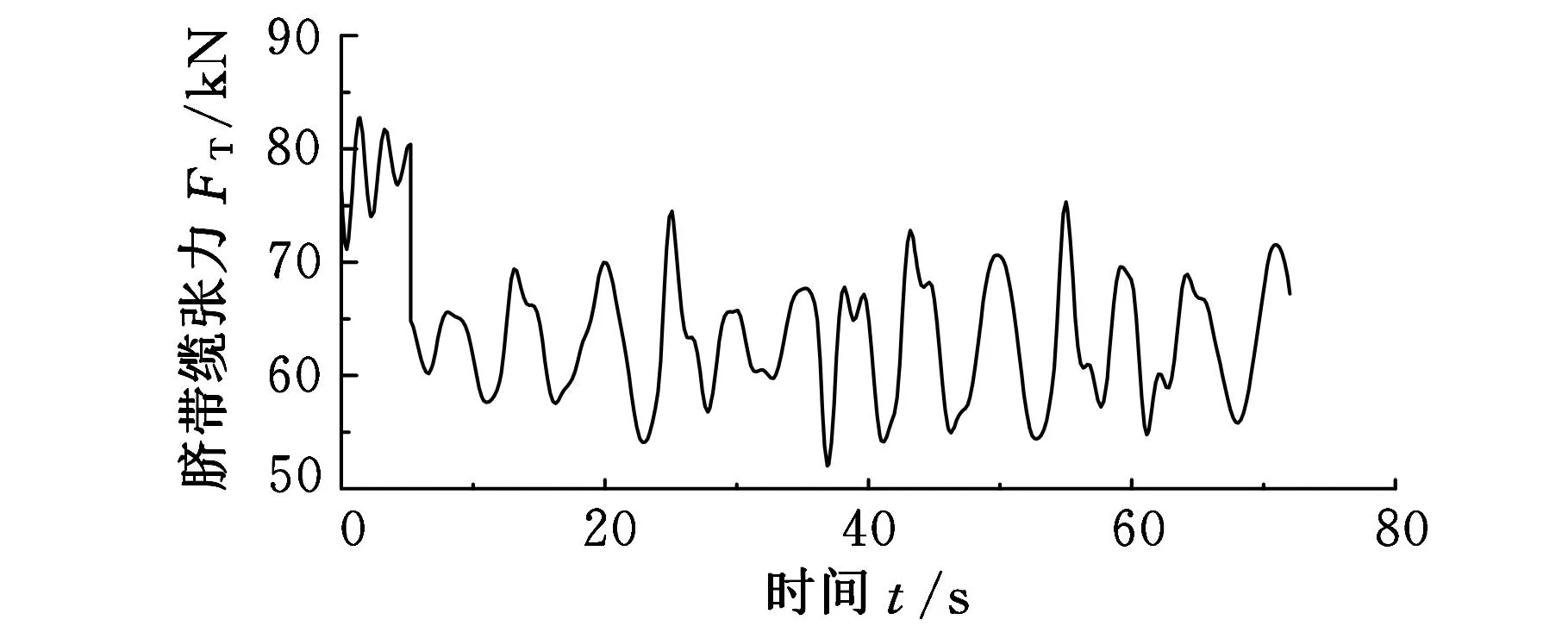
图8 下放速度为1.5m/s时的深海钻机脐带缆张力
综上分析可知,深海钻机下放作业过程中,可以根据海洋绞车的性能参数选择尽可能大的下放速度。
2.3不同回收速度对深海钻机动态特性的影响
图9~图11所示为不同回收速度时深海钻机摆角γ和δ的动态响应,从图可以看出,深海钻机在海水中的摆角γ和δ均较小,且摆动周期较大。当深海钻机提出水面后,摆角γ和δ的摆动幅值将迅速增大,且摆动周期逐渐变小。同时,随着回收速度的不断增大,深海钻机的摆角γ和δ的变化幅值将不断减小。

图9 回收速度为0.5m/s时的深海钻机摆角δ和γ

图10 回收速度为1.0m/s时的深海钻机摆角δ和γ

图11 回收速度为1.5m/s时的深海钻机摆角δ和γ
图12~图14所示为不同回收速度时深海钻机脐带缆张力响应曲线,对比可知,随着回收速度的不断增大,深海钻机脐带缆张力的最大值将不断增大,脐带缆张力的增大有可能导致脐带缆因承受过大的载荷而失效断裂。

图12 回收速度为0.5m/s时的深海钻机脐带缆张力
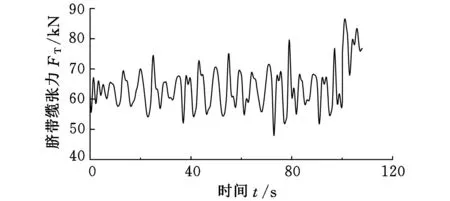
图13 回收速度为1.0m/s时的深海钻机脐带缆张力
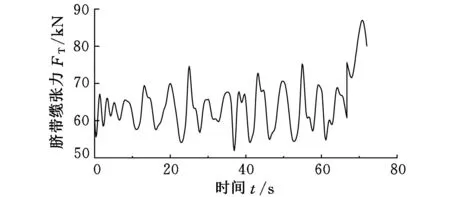
图14 回收速度为1.5m/s时的深海钻机脐带缆张力
综上分析可知,深海钻机回收作业过程中,可以根据海洋绞车的性能参数选择尽可能小的回收速度。
3结语
以深海钻机收放系统为研究对象,采用拉格朗日方程建立了计入海水阻力的深海钻机收放系统动力学模型。研究了不同收放速度对深海钻机收放系统动态特性的影响。
计算结果分析表明:受海水阻力的影响,深海钻机在入水前后,摆动角度和脐带缆张力的变化幅值均存在较大差异,海水阻力对两者的变化具有明显的抑制效果,脐带缆张力变化幅值的减小可以有效改善脐带缆的力学性能,避免因受过大的冲击变载荷而失效断裂。
随着下放速度的不断增大,深海钻机的摆动幅值和脐带缆张力的变化幅值将不断减小。随着回收速度的不断增大,深海钻机的摆动幅值将不断减小,脐带缆张力的最大值将不断增大。
参考文献:
[1]Jin S C. Deep Ocean Mining Technology Ⅲ Developments[C]//Proceedings of the Eighth International Society of Offshore and Polar Engineers Ocean Mining Symposium. Chennai, India, 2009: 1-7.
[2]Rahul S. Deep Sea Mining Economic, Technical, Technological, and Environmental Considerations for Sustainable Development[J]. Marine Technology Society Journal, 2011, 5(5): 28-41.
[3]刘德顺, 金永平, 万步炎, 等. 深海矿产资源岩芯探测取样技术与装备发展历程与趋势[J]. 中国机械工程, 2014, 25(23): 3255-3265.
Liu Deshun, Jin Yongping, Wan Buyan, et al. Review and Development Trends of Deep-sea Mineral Resource Core Sampling Technology and Equipment[J]. China Mechanical Engineering, 2014, 25(23): 3255-3265.
[4]王鹏程, 方勇纯, 相吉磊, 等. 回转旋臂式船用起重机的动力学分析与建模[J]. 机械工程学报, 2011, 47(20): 34-39.
Wang Pengcheng, Fang Yongchun, Xiang Jilei, et al. Dynamics Analysis and Modeling of Ship-mounted Boom Crane[J]. Journal of Mechanical Engineering, 2011, 47(20): 34-39.
[5]Yoshiki N. Static Analysis of Axially Moving Cables Applied for Mining Nodules on the Deep Sea Floor[J]. Applied Ocean Research, 2012, 34:45-51.
[6]Schellin T E, Jiang T, Sharma S D. Crane Ship Response to Wave Groups[J]. Journal of Offshore Mechanics and Arctic Engineering, 1991,113: 211-218.
[7]Chin C, Nayfeh A H, Abdel-Rahman E. Nonlinear Dynamics of a Boom Crane[J].Journal of Vibration and Control, 2001, 7(2): 199-220.
[8]Masoud Z N, Nayfeh A H, Mook D T. Cargo Pendulation Reduction of Ship-mounted Cranes[J]. Nonlinear Dynamics, 2004,35:299-311.
[9]Hanspeter S. Rate-based Ship-mounted Crane Payload Pendulation Control System[J]. Control Engineering Practice, 2008,16 :132-145.
[10]王学林, 尤心一,胡于进. 规则波作用下起重船吊重动力学仿真[J]. 中国机械工程, 2010, 21(9): 1077-1081.
Wang Xuelin, You Xinyi, Hu Yujin. Cargo Pendulation Analysis of Moored Crane Ship under Regular Waves[J]. China Mechanical Engineering, 2010, 21(9): 1077-1081.
[11]李积德. 船舶耐波性[M]. 哈尔滨:哈尔滨工程大学出版社, 2007.
[12]Tasai F. Damping Force and Added Mass of Ships Heaving and Pitching[J]. Transactions of the West Japan Society of Naval Architects, 1961, 21: 109-132.
[13]Fossen T I, Smogeli ∅ N. Nonlinear Time-domain Strip Theory Formulation for Low-speed Manoeuvring and Station-keeping[J]. Modeling, Identification and Control, 2004, 25(4): 201-221.
(编辑张洋)
