变结构控制技术在鱼雷舵机中的应用
2015-10-24 01:15张秦南俊王立文
水下无人系统学报 2015年1期
李 强,张秦南,李 俊王立文
(1. 中国船舶重工集团公司 第705研究所,陕西 西安,710075; 2. 水下信息与控制重点实验室,陕西 西安,710075)
变结构控制技术在鱼雷舵机中的应用
李强1,2,张秦南1,2,李俊1,王立文1,2
(1. 中国船舶重工集团公司 第705研究所,陕西 西安,710075; 2. 水下信息与控制重点实验室,陕西 西安,710075)
为提高鱼雷机动性与舵机控制系统的抗干扰能力,采用滑模变结构控制技术设计鱼雷舵机的变结构控制系统,建立了舵机控制数学模型,并以某型鱼雷的舵机为例进行了系统仿真。仿真结果表明,与传统比例-积分-微分(PID)控制技术相比,使用滑模变结构控制方法设计的控制系统响应速度快,超调量小,抗干扰能力强,稳定性更好,该方法能提升舵机控制系统的性能。
鱼雷舵机; 滑膜; 变结构控制
0 引言
舵机作为鱼雷控制系统的执行机构,为鱼雷提供操舵力矩,从而控制雷体的航行姿态。舵机接收来自控制计算机输出的操舵指令,按要求的控制品质操纵舵轴转动,驱动舵面偏转到指定位置,完成对鱼雷航行姿态的控制[1]。
传统直流电机虽然具有良好的调速性能,但由于这类电机具有换向器和电刷等机械接触部件,工作时容易产生电火花,可靠性较差,同时电机的转速和输出功率也受到限制。永磁无刷直流电机的应用很好地解决了这一问题,由于没有换向器和电刷,可以消除换向火花引起的电磁干扰与电刷和换向器的摩擦力矩,降低了电机的维护成本。此外,无刷直流电机质量轻、体积小、效率高、转矩/质量比重大、转动惯量大,具有高转速、大转矩与大功率的优点[2]。
经典的鱼雷舵机控制理论以比例-积分-微分(proportion integral derivative,PID)控制为代表,它结构简单,工程上容易实现,受到广泛的应用。但传统PID控制系统难以协调快速性和稳定性之间的矛盾,在参数变化和外界干扰时,稳定性较差。
为了改善传统PID控制的局限,变结构控制理论被引入电机控制领域。变结构控制作为一种现代控制方法,与传统的PID控制相比较,其控制律更为简单,可以协调动态与稳态性能,此外,其对参数变化与外界干扰具有不变性,鲁棒性强[3]。
基于此,文中选择变结构控制方法来设计鱼雷的舵机控制系统,使用MATLAB/Simulink模块进行系统建模,仿真结果表明,该控制系统响应速度快,超调量小,抗干扰能力强,稳定性更好[4-6]。
1 鱼雷舵机数学模型
鱼雷舵机控制电路主要由无刷直流电机、减速器以及反馈电位计组成,鱼雷闭环舵机及舵回路结构框图如图1所示。

图1 舵机及舵回路结构框图Fig. 1 Structure block diagram of steering gear and rudder loop
1.1电机数学建模
电机的电气原理如图2所示。
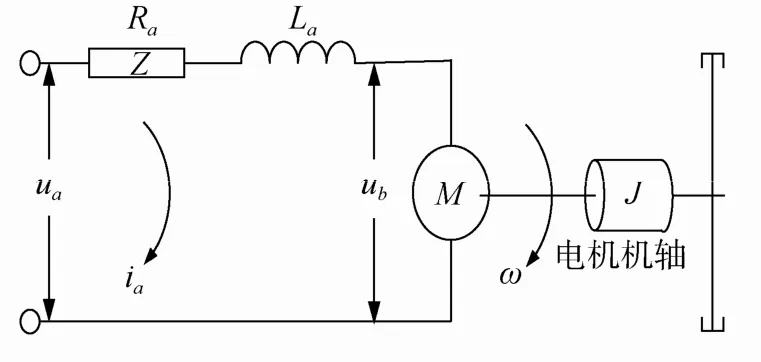
图2 电动机电气原理图Fig. 2 Schematic of motor′s electrical principle
根据图2所示,电机的转速由电枢电压ua控制,由基尔霍夫定理可写出电路方程

当电枢转动时,电枢中的感应电压

根据动量矩定理,电机转子的力矩方程

式中: J为电机转动惯量,kg·m2; ua为电枢电压(操舵指令),V; ub为电机反电动势,V; Ra为电枢绕组的电阻,Ω; La为电枢绕组的电感,H; ω表示电机转速rad/s; λ为粘性摩擦系数,kg·m2·s; Med为额定负载力矩,N·m;Ke指电动机力矩常数,且是反电动势常数,且
1.2电机仿真模型
考虑到实际电机粘性摩擦较小,建模时不予考虑,于是根据式(1)~式(3)以及电机工作原理可以建立电机的Simulink仿真模型如图3所示。
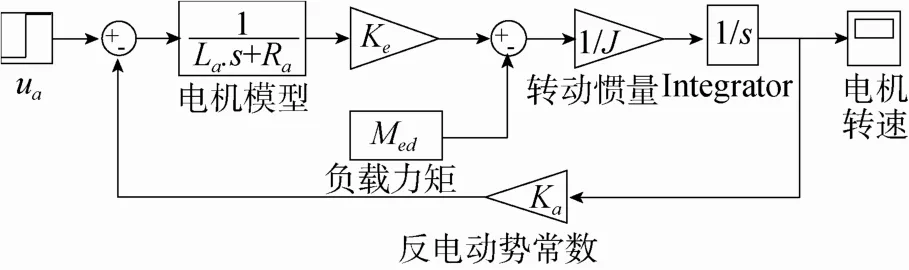
图3 鱼雷舵机仿真模型Fig. 3 Simulation model of torpedo steering gear
2 变结构控制律推导
由变结构控制理论可知,变结构控制系统的关键在于设计变结构控制律使系统状态沿着状态空间中的滑动模态趋向原点[7]。
考虑到舵机系统实际上是一个位置跟随器,要求系统输出位置跟踪输入位置,因此可选取系统的误差信号e及其1阶导数e.作为状态变量

电机的状态方程为

式中: K为电机传递系数;f为系统干扰项。
设系统的滑动模态方程为

式中,c为滑动模态参数,对式(7)两边求导,并将式(6)代入得

变结构控制系统的能达条件(滑动模态存在)

则有

选取适当的滑动模态参数c,使得

如此,式(10)中左边第2项恒小于零,于是滑动模态存在条件可写为

根据以上公式可以推导出电动舵机系统的变结构控制律

至此,推导出的滑模变结构控制律

分析式(13)可知,电机启动需要1个大的启动电压,当舵机系统位置误差x1减小到一定程度时,控制u将落入死区,给系统带来静态误差,而且降低了系统的抗干扰能力,电机的快速性得不到充分发挥,在电路实现上也有一定的困难。
基于此,需要简化式(13)所示的变结构控制律。假设电机的额定输入电压为±U,由于舵面存在机械限位,因此舵机系统的最大状态误差max(|x1|)是存在的。考虑最极端情况下,取max(|x1|)为正机械限位角与负机械限位角之差。于是,总存在一个滑动模态参数c,使得对于任意的x1,下式均成立

因此,式(13)的变结构控制律可以简化为

由式(18)可以知道,舵机状态变化时,电机始终在额定电压下运转,这样处理可以消除死区的影响,提高系统精度,充分发挥系统的快速性,提高舵机的抗干扰性,也为硬件电路的设计带来方便。
使用变结构控制律设计的舵机控制系统在提升系统快速性、稳定性与抗干扰性的同时也会带来系统的高频抖振[8]。这里在系统仿真中加入一个小的线性区来消除抖振,线性区的范围由舵机快速性的要求确定。
滑动模态参数c的选取需要综合考虑各种因素,c的绝对值越大,系统收敛性越快,但由于电机转速有限,c取值过大会使初始状态进入滑动模态所需时间变长[9]。这里综合考虑选取使调整时间短、超调量小的c值作为系统的滑动模态参数值,实际使用中需根据不同电机情况进行c值的选取。
3 系统仿真
加入变结构控制律后,变结构控制系统的仿真原理见图4。

图4 鱼雷舵机系统仿真原理图Fig. 4 Simulation schematic of torpedo steering gear system
3.1模型验证
首先对所建模型在空载状态和额定负载状态下进行了仿真,仿真过程中,设定操舵指令电压为38 V,采样时间为1 ms,2种状态下的仿真结果分别如图5和图6所示。
仿真结果表明,电机空载转速为3 611 r/min,额定负载下转速为3 159 r/min,符合某型鱼雷电机转速指标。

图5 空载电机转速仿真曲线Fig. 5 Simulation curve of motor speed without load
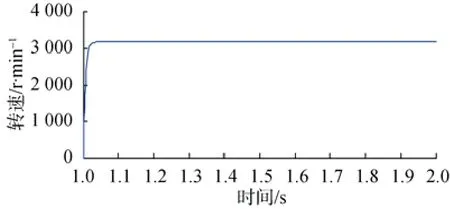
图6 额定负载下电机转速仿真曲线Fig. 6 Simulation curve of motor speed with rated load
假设使电机舵角输出为4°,分别对PID控制系统与变结构控制系统进行仿真,结果如图7和表8。仿真结果表明,使用变结构控制的系统响应速度快,舵角输出误差小。
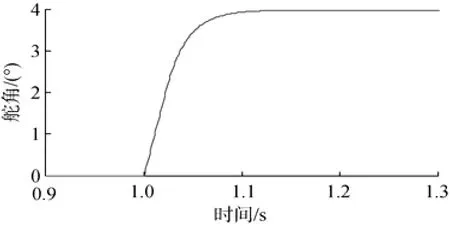
图7 比例-积分-微分(PID)控制系统舵角为4°时的输出曲线Fig. 7 Output curve of proportion-integral-differen-tiation(PID)control system when rudder angle is 4°

图8 变结构控制系统舵角为4°时的输出曲线Fig. 8 Output curve of variable structure control system when rudder angle is 4°
为比较传统PID控制系统与变结构控制系统的抗干扰性,在系统中加入5 V的随机白噪声干扰项,观察舵角的输出曲线参见图9和图10。
仿真结果表明,变结构控制系统抗干扰能力强,系统更稳定。
4 结束语
该文采用滑模变结构控制方法设计了鱼雷舵机控制系统,针对某型鱼雷的舵机进行了系统仿真分析。通过与传统PID控制系统的比较,结果表明,使用滑模变结构方法控制的系统响应速度快,超调量小,抗干扰能力强,稳定性更好。
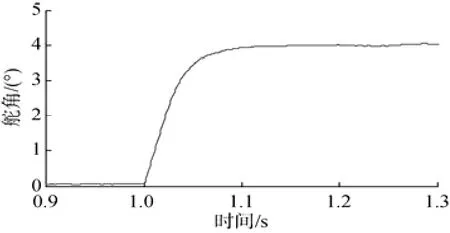
图9 噪声条件下PID控制系统舵角输出曲线Fig. 9 Rudder angle output curve of PID control system with noise
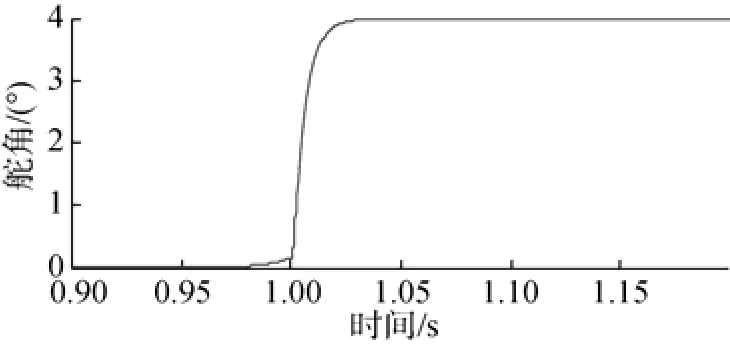
图10 噪声条件下变结构控制系统舵角输出曲线Fig. 10 Rudder angle output curve of variable structure control system with noise
[1]徐德民. 鱼雷自动控制系统[M]. 西安: 西北工业大学出版社,2001.
[2]刘刚,王志强,房建成. 无刷直流电机控制与应用[M].北京: 机械工业出版社,2008.
[3]周军. 变结构控制理论在电动舵机系统设计中的应用[J]. 西北工业大学学报,l 990,8(3): 273-280.
[4]蒋继军. 鱼雷仿真技术[M]. 北京: 国防工业出版社,2013.
[5]刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社,2012.
[6]王江,付文利. 基于MATLAB/Simulimk系统仿真权威指南[M]. 北京: 机械工业出版社,2013.
[7]高为炳. 变结构控制理论及设计方法[M]. 北京: 科学出版社,1996.
[8]吝龙艳,张秦南,高剑. 变速鱼雷自适应滑模控制研究[C]//2012年鱼雷制导技术学术研讨会论文集. 长春:2012.
[9]湛胜华. 舵机伺服控制系统研究与设计[D]. 重庆: 重庆大学,2007.
(责任编辑: 杨力军)
Application of Variable Structure Control Technology to Torpedo Steering Gear
LI Qiang1,2,ZHANG Qin-nan1,2,LI Jun1,WANG Li-wen1,2
(1. The 705 Research Institute,China Shipbuilding Industry Corporation,Xi′an 710075,China; 2. Science and Technology on Underwater Information and Control Laboratory,Xi′an 710075,China)
To improve the maneuverability of a torpedo and anti-interference capability of the steering gear control system,a variable structure control system of torpedo steering gear is designed with the sliding mode variable structure control technology,and a steering gear control model is established. System simulation is carried out for a certain type of torpedo,and the results show that this control system using sliding mode variable structure achieves faster response speed,smaller overshoot,stronger anti-interference capability,and better stability compared with the conventional proportion-integration-differentiation(PID)control method,and this design method can improve the performance of torpedo steering gear control system.
torpedo steering gear; sliding mode; variable structure control
TJ630.33
A
1673-1948(2015)01-0040-04
2014-11-20;
2014-12-22.
李强(1990-),男,在读硕士,主要研究方向为武器系统与运用工程.
猜你喜欢
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
弹箭与制导学报(2020年1期)2020-07-09
舰船电子工程(2020年4期)2020-06-19
弹箭与制导学报(2019年6期)2019-06-24
电子制作(2018年1期)2018-04-04
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21