四轨电磁发射器电枢-轨道初始接触特性研究*
2022-07-25 03:50:10何朗宁刘少伟苗海玉
火力与指挥控制 2022年5期
何朗宁,刘少伟,苗海玉,关 娇
(1.空军工程大学防空反导学院,西安 710051;2.空军工程大学航空机务士官学校,河南 信阳 464000;3.空军工程大学信息与导航学院,西安 710077)
0 引言
理想电枢与轨道的接触是电枢臂表面完全与轨道接触,电枢与轨道之间有足够的接触压力并且能克服由于电流集中形成的接触分离力,但是过大的接触反力会延迟电枢的启动时间,造成电枢与轨道接触区域热烧蚀。另外,轨道刨削、电枢转捩是影响电磁发射器轨道寿命和性能的重要因素。而电枢与轨道之间接触压力的大小和分布是影响转捩的一项重要因素,接触压力及分布都与电枢的结构有关。目前,对于电枢结构方面的研究主要集中于C型电枢和H 型电枢。从研究内容来分,主要涉及电枢结构参数设计、电枢电流和温度分布特性、电枢轨道接触特性。文献[1-3]对电磁轨道发射器C 型电枢的电流密度、磁通量以及温度分布进行仿真研究;文献[4-5]研究了C 型固体电枢的尺寸参数对电流密度、电枢压强分布的影响规律,为电枢的设计提供了参考;文献[6]利用数值分析和有限元分析的方法对固体电枢的内弹道性能进行了计算仿真,得出减小电枢内侧曲率半径能增大发射初速度的结论;文献[7-8]对电枢轨道接触面温度场分布进行了研究;文献[9]建立电磁- 温度- 应力多物理场耦合计算模型,得到了动态发射过程中包括电磁力、温度应力和预紧力的多成分轨道应力载荷时空分布特性。针对C 型固体电枢与轨道的过盈装配,文献[10-11]研究了C 型固体电枢的结构对电枢-轨道接触压强分布影响规律;文献[12]通过建立接触面热流模型和接触分层模型,研究了固体电枢与轨道在过盈配合时,接触压强与接触电阻和接触面温度分布的关系;文献[13]通过枢轨结构优化解决C 型电枢转捩问题。为研究发射过程中电枢-轨道的接触特性;文献[14]利用20 mm 口径的电磁轨道发射实验装置,对不同长度电枢臂的C 型电枢进行发射实验,通过观察收回的电枢表面研究了电枢-轨道接触情况;文献[15]将发射过程中的电枢臂中的电磁力简化为均匀分布的压力,通过有限元仿真的方法研究了通电前后电枢-轨道接触特性。为得到满足要求的导弹电磁弹射器驱动电机,文献[16]提出一种基于双边有槽直线感应电机的多驱动导弹电磁弹射器设计方案,分析了电机结构等参数对电机性能的影响;文献[17]对电磁发射一体化弹丸的膛内及膛口流场进行了数值计算,研究了弹丸膛内的压力、温度变化规律、膛口流场结构以及冲击波衰减规律;文献[18]建立了3 种不同构型的轨道和电枢,对轨道和电枢的电流密度分布情况及电磁力进行比较分析,并探讨了枢轨凹凸值对电流分布和电磁力的影响,而文献[19]则建立了增强型四极轨道电磁发射器电磁仿真有限元模型,对比分析了非增强型和增强型四极轨道电磁发射器的电流密度、磁场强度和轨道电磁分布特性。
本文设计了四极电磁轨道发射器电枢结构,并建立了电枢- 轨道结构力学模型,对电枢安装过程进行有限元仿真,对电枢- 轨道的初始接触特性研究分析。分别研究了电枢臂长度、过盈量、电枢臂厚度等不同结构参数对初始接触特性的影响规律。针对四极轨道电磁发射器电枢的结构特点,利用反向加载获取电枢臂挠度,进而设计基于挠度拟合的曲线电枢臂,进一步提高了电枢臂与轨道的接触效率。
1 电枢-轨道结构力学有限元模型
1.1 电枢三维模型
图1(a)所示为电枢模型。参考二极轨道电磁发射器的C 型电枢,设计如图中所示的四极轨道电磁发射器的带有电枢臂的电枢。图1(b)为电枢-轨道结构仿真模型中的电枢1/4 模型结构示意图,图中l为电枢臂长度,w为电枢臂的宽度,d为电枢的尾部厚度,t为电枢臂的过盈量,h为电枢臂的头部厚度,θ为电枢臂的斜角。
图1 电枢模型
电枢- 轨道结构力学模型的创建步骤与发射器电磁模型的创建步骤类似,在此不再赘述。电枢-轨道结构模型中电枢的参数如表1 所示。

表1 电枢结构参数
1.2 划分网格
电枢- 轨道模型采用SOLID185 结构单元,采用六面体网格对电枢和轨道进行网格划分,划分结果如图2 所示。为了使获得的电枢-轨道接触面的压强分布特性更加准确,需要对接触区域的网格进行细化,如图2 中所示。该模型中共有单元20 410个,节点共有23 586 个。

图2 电枢和轨道网格
2 电枢-轨道初始接触
图3 所示为电枢臂表面压强分布云图,其中,l=150 mm、t=3 mm。可以看出,电枢与轨道的接触压强只分布在电枢臂表面的部分区域,接触区域既不在电枢臂尾部位置也不在头部位置,压强呈对称分布而且分布很不均匀,在靠近电枢臂两侧边缘处出现压强集中现象。
图3 电枢臂压强分布云图
为了详细分析电枢- 轨道的接触压强分布特性,现引入一些电枢-轨道接触参数。如图4 所示,P1 是接触面上压强最大值,P2 是接触面中轴线上的最大值,l是电枢臂侧边接触长度,l是电枢臂尾部到接触区域的距离,l是电枢臂的长度。SA 是整个电枢臂上表面的面积,CA 是电枢臂与轨道实际接触的面积,A1 是压强在[0.5P1,P1]范围内的区域面积,F是接触反力大小。参数CA 反映了接触面的实际大小,参数l反映了接触面在电枢臂上的位置,参数CA/SA 是电枢臂的接触效率。
图4 接触参数示意图
为了研究电枢臂的结构对电枢- 轨道接触特性的影响,下面分别研究电枢臂长度、过盈量、厚度对接触参数的影响。
2.1 电枢臂长度对其接触特性的影响
对不同长度的电枢臂与轨道的接触特性进行研究分析,电枢初始接触特性如表2 所示。其中,电枢臂过盈量t=3 mm,电枢臂宽度w=100 mm,电枢臂尾部厚度d=20 mm,头部厚度h=50 mm。

表2 接触特性随电枢臂长度的变化
下页图5 为不同长度的电枢臂侧边上的压强分布曲线,侧边位置如图4(a)中,线AB 所示,其中,t=3 mm,w=100 mm,d=20 mm。图5 中,每条曲线的峰值即为参数P1 的值,横坐标0 mm 处对应电枢臂的尾部位置,曲线的左侧压强为0 的长度为参数l。可以看出,当电枢臂的长度增加时,电枢- 轨道接触压强的最大值减小。同时,参数l随着电枢臂长度的增加而增大,这表明当电枢臂长度增大时电枢-轨道接触区域离电枢臂的尾部位置越远。
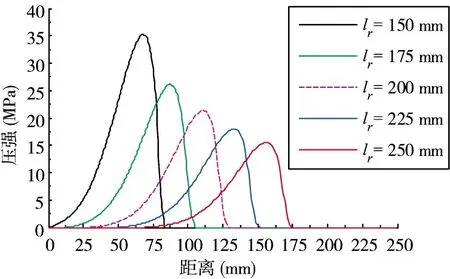
图5 沿电枢臂侧边压强分布
当电枢臂的其他结构参数不变时,随着电枢臂长度的增加,参数CA 增大,即电枢- 轨道的接触面积随着电枢长度的增大而增大,但是参数CA/SA 却是随着电枢臂长度的增大而减小,即电枢臂的接触效率在下降,其中有很大的区域并没有参与接触。接触压力随着电枢臂长度的增加而减小,电枢臂更长时,其电枢- 轨道的接触压强分布更加均匀。
从以上分析可知:当电枢臂长度增加时,电枢-轨道的接触面积增大,但是电枢臂的接触效率减小,接触面的压强峰值减小,而且接触区域的压强分布更加均匀,电枢与轨道之间的接触反力减小。同时,电枢-轨道接触区域位置发生了变化,即随着电枢臂长度的增加,接触区域向电枢头部移动。
2.2 电枢臂过盈量对其接触特性的影响
表3 所示为不同过盈量的电枢臂与轨道的接触参数表。其中,电枢臂长度l=175 mm,电枢臂宽度w=100 mm,电枢臂尾部厚度d=20 mm,头部厚度h=50 mm。可以看出:接触压力随着电枢臂长度的增加而增大,这是由于当电枢臂的过盈量增大时,电枢安装过程中电枢臂产生的变形更大,即产生的反作用力就更大。接触区位置与接触效率变化不大。
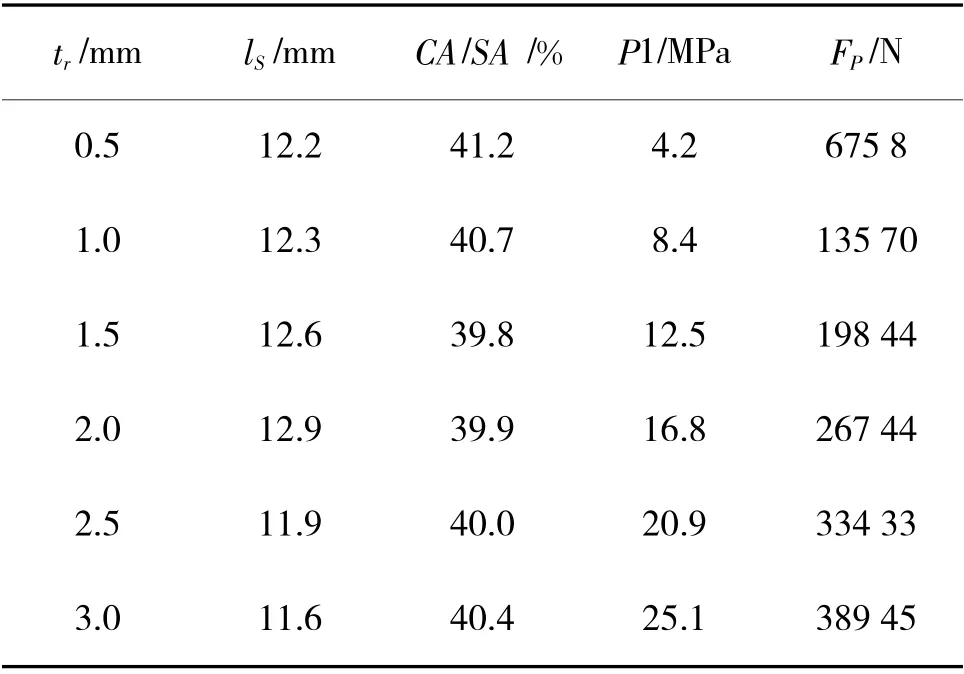
表3 接触特性随过盈量的变化
图6 所示为不同过盈量时电枢臂侧边上的压强分布曲线,其中,l=175 mm,w=100 mm,d=20 mm。可以看出,当电枢臂的过盈量在从0.5 mm 增加到3 mm 时,电枢-轨道接触面压强峰值成比例增大,但是参数l并没有发生变化,也就是说接触面的位置没有发生变化。
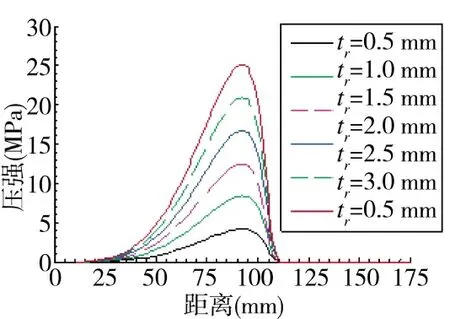
图6 沿电枢臂侧边压强分布
电枢臂过盈量增加对参数和参数P1 的影响最大,过盈量越大,接触面压强峰值和接触反力越大;参数、CA、CA/SA 不受电枢臂量的影响。因此,过盈量只影响了接触面压强的大小,而对接触面的大小、压强分布的均匀程度几乎没有影响。
2.3 电枢臂厚度对其接触特性的影响
电枢臂的厚度参数有电枢尾部厚度和电枢头部厚度,为了研究这两个参数对电磁发射过程中电枢- 轨道接触特性的影响,分别取前端厚度h=30 mm、40 mm、50 mm,尾部厚度d=10 mm、20mm、30mm,共9 组电枢臂结构进行仿真分析,其中,其他结构参数不变,分别为l=150 mm,w=100 mm,t=2 mm。
从表4 中可以看出:当电枢臂头部厚度h不变,电枢臂尾部厚度d从10 mm 增加到30 mm 时,电枢-轨道接触压强的最大值减小。同时,接触参数l也随着d的增大而减小。当h=40 mm 和h=50 mm时,出现参数l减小为0 的情况。
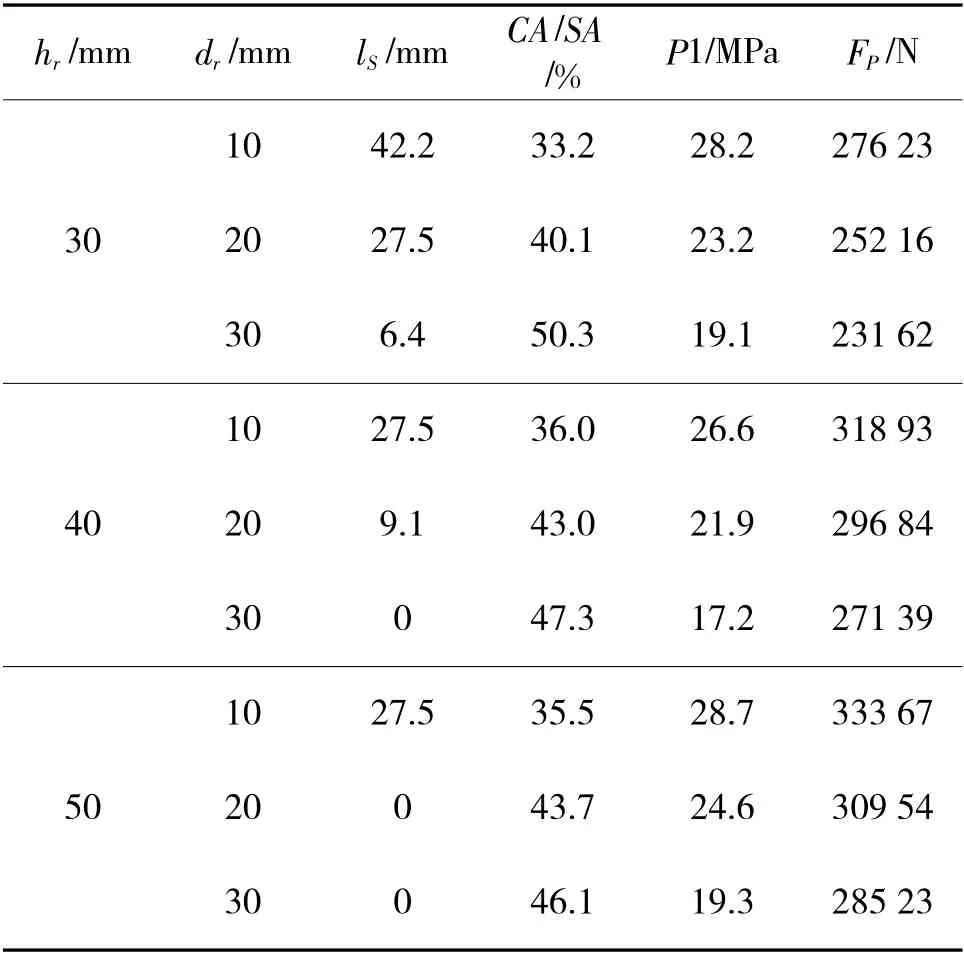
表4 接触特性随电枢臂厚度的变化
当电枢臂的尾部厚度d不变时,随着电枢臂头部厚度h增大,电枢-轨道接触面压强峰值略微减小,但是减小范围在1 MPa 之内。同时,接触参数l也随着参数h的增大而减小。
就电枢-轨道的初始接触来看,当电枢臂的头部厚度h=30 mm 时,其接触反力最小、接触面的压强分布最均匀,但是电枢-轨道的初始接触面积只有在参数d=30 mm 时最大;在相同头部厚度条件下,尾部厚度t为30 mm 时,电枢- 轨道接触面积最大,接触反力最小,而且接触面压强分布最均匀。仅就电枢-轨道初始接触来看,d=30 mm、h=30 mm时,电枢-轨道的接触特性是最好的。
3 基于反向加载法的曲线电枢
反向加载法就是将预设的电枢- 轨道接触压强反向加载在电枢臂上,利用悬臂梁弯曲变形的理论,对施加反向载荷的电枢臂弯曲后的挠度和转角进行求解,得到的挠度曲线就是欲求的曲线电枢的轮廓。
通过ANSYS 软件将接触压强加载到电枢臂上,仿真得到电枢臂不同位置的挠度值,采用非线性最小二乘法进行数据拟合,得到电枢臂轮廓曲线。拟合结果为:

仿真结果如图7 所示。其中,图7(a)所示为直线轮廓的电枢臂与轨道初始接触的压强分布云图。可以看出:

图7 电枢-轨道初始接触压强分布云图,lr=175 mm
1)采用了拟合后的曲线轮廓的电枢臂与轨道初始接触的接触面积明显增大,优化后的电枢-轨道接触面积(接触效率)增大50豫左右。
2)电枢- 轨道的接触区域的位置发生变化,曲线轮廓电枢与轨道的接触区域在电枢臂尾部位置,其中,接触参数l=0 mm,这是电枢接触效率增大的原因之一。
3)在接触压强分布均匀性上,可以看出曲线轮廓电枢臂与轨道接触压强分布更加均匀,而且没有压强集中的现象。同时可以看出,优化后的电枢臂与轨道接触的最大压强明显小于优化之前的接触最大压强。
经过简单的对比分析可知,采用反向加载位移仿真预测法是可行的,通过仿真获得的电枢臂的轮廓曲线方程,弥补了解析求解的弊端。对优化后的电枢臂进行接触仿真后,发现不仅消除了接触分离的现象,还增大了电枢臂的接触效率,降低了最大接触压强,达到了优化的目的。
4 结论
本文建立了四极轨道电枢- 轨道初始接触的结构力学模型,通过对电磁发射初期进行建模仿真计算及分析,获得部分四极轨道电枢结构参数变化对接触压强、接触面积和接触区域等初始接触特性的影响规律如下:
1)随着电枢臂长度的增加,电枢和轨道的接触面积增加,接触效率减小,接触面的压强峰值减小,而且接触区域的压强分布更加均匀,接触区域向电枢头部移动。
2)过盈量的变化只影响了接触面压强的大小,而对接触面的大小、接触区域位置、压强分布的均匀程度几乎没有影响。
3)随着电枢臂头部厚度的增加,接触面积增加,接触压力略有增加,接触区域向尾部移动。
4)随着电枢臂尾部厚度的增加,接触面积增加,接触压力减小,接触区域向尾部移动。
5)为解决电枢尾部接触分离现象,进一步提出了拟合电枢臂轮廓曲线的改进方法。结果表明:利用曲线电枢臂进行初始接触时,在电枢臂尾部位置没有出现接触分离的现象,而且电枢臂的接触面积和接触效率显著提高,接触面压强分布更加均匀,接触压力有所减小,改善了电枢-轨道初始接触面的压力分布情况,降低了对轨道造成的影响,为施加脉冲电流提供了良好的接触状态。
猜你喜欢
兵器装备工程学报(2023年5期)2023-05-31 13:44:26
舰船科学技术(2022年20期)2022-11-28 08:20:28
中国临床医学影像杂志(2021年6期)2021-08-14 02:22:00
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
科技视界(2017年1期)2017-04-20 00:48:12
中国新技术新产品(2017年7期)2017-03-18 21:14:47
中国塑料(2015年4期)2015-10-14 01:09:32
山东工业技术(2015年14期)2015-07-16 18:16:08
微特电机(2015年1期)2015-07-09 03:45:02