
铰接履带车转向及俯仰性能研究
2012-02-22 08:07成凯张俊曲振东
兵工学报 2012年2期
成凯,张俊,曲振东
(1.吉林大学 机械科学与工程学院,吉林 长春130025;2.哈尔滨北方特种车辆制造有限公司,黑龙江 哈尔滨150030)
0 引言
铰接履带车是一种适应地形广,在军事和民用上都能起到重要作用的工程车辆。铰接式履带车由两节车体组成,在通过起伏地形时,两节车体就可以随着地形的变化做出相应的调整,使有限的履带长度能尽可能地保持与地面的接触,进而获得较高的通过能力,因此,又称为全地形车[1]。车辆分为前后两节,中间通过铰接机构连接,可实现两节车相对转向、俯仰及水平扭转。此外,该车还能够涉水浮行前进,且前后车厢都有驱动桥。
铰接履带车的铰接转向由于其具有履带接地面积大,运动特性复杂等难点,国内研究相对较少,本文在充分研究轮式车辆铰接转向[2-3]及单节履带车辆转向时履带受力情况的基础上推导出了水平转向阻力矩的计算公式,并在此基础上形成一套完整的履带车铰接转向、俯仰性能分析和设计的思路和方法。
1 铰接机构分析
图1为铰接转向机构结构简图,图中A、B 点为转向液压缸在后车的铰点位置;A'、B'为履带车转35°后液压缸在后车的铰点位置;C、D 点为液压缸在前车的铰点位置。

图1 铰接转向机构结构简图Fig.1 Structure diagram of articulated turning mechanism
图2为车辆处于水平位置时铰接结构的轴测图。通过图1、图2可以看出,该铰接机构分别通过两个水平液压缸和两个俯仰液压缸实现铰接转向及俯仰动作。水平转向液压缸一端与前车车体相连,另一端作用在铰接支座上,铰接支座则通过导向套与后车车体相连。俯仰液压缸的一端与前车车体的附座连接,另一端与铰接支架的上接头体相连,支架则与铰接支座相连。
上述连接均为销轴连接,因此可以灵活的实现铰接转向及俯仰动作,且铰接支座与后车车体的导向套也可以相对转动,因此前、后车体可以通过铰接机构实现相对扭转。
2 转向阻力矩求解
为给研究初期以及设计选型提供一定的理论依据,本文主要研究铰接履带车在较恶劣工况下的转向阻力矩。经对比分析[4],黏性土壤路况的转向阻力矩较大,故暂选该路况进行分析。

图2 铰接机构轴测图Fig.2 Axonometric drawing of articulated turning mechanism
车辆在行驶过程中其所受地面摩擦等阻力主要由驱动轮所提供的牵引力克服[5],如图5中Fx4、Fx3由驱动力抵消一部分,因此,在黏性土壤条件下,当车辆处于静止条件时的静态转向阻力是各种工况中较大的[6]。
2.1 转向受力分析
1)引起转向阻力矩的因素
a 履带板的支撑面、侧面和履刺表面与土壤的相对摩擦;
b 履带转动时对土壤的挤压和剪切;
c 履带转动时对堆积在它旁边土壤的推拥。
2)理论简化[7]
a 履带接地比压均匀;
b 在转向过程中履带各点的下陷量相同且等于静止时的下陷量。
3)转向时履带的受力分析
铰接履带车转向时每条履带都有其接地面瞬心Osi(i=1,2,3,4),如图3所示。它的定义是把接地面假想地充分扩大后,该平面和地面没有相对运动的一个点[1]。当Osi与履带接地面几何中心Oi不重合时称为履带接地面速度瞬心的偏移,侧向外力作用使Osi相对Oi产生纵向偏移Di;履带的滑移或滑转使Osi相对Oi产生横向偏移Ai。纵向偏移Di(在此认为Di=0)及横向偏移Ai直接影响地面对履带的作用力[7]。
4)履带速度瞬心的确定
履带接地面的瞬时转向中心(内侧为O1,外侧为O2)是通过履带的相对速度和牵连速度所确定的。当外侧履带出现滑转时v2s<v2,当内侧履带出现滑移时v1s>v1,因而实际转向时的瞬心与理论瞬心出现偏移。对于横向偏移Ai,其产生的原因是履带的滑移和滑转。
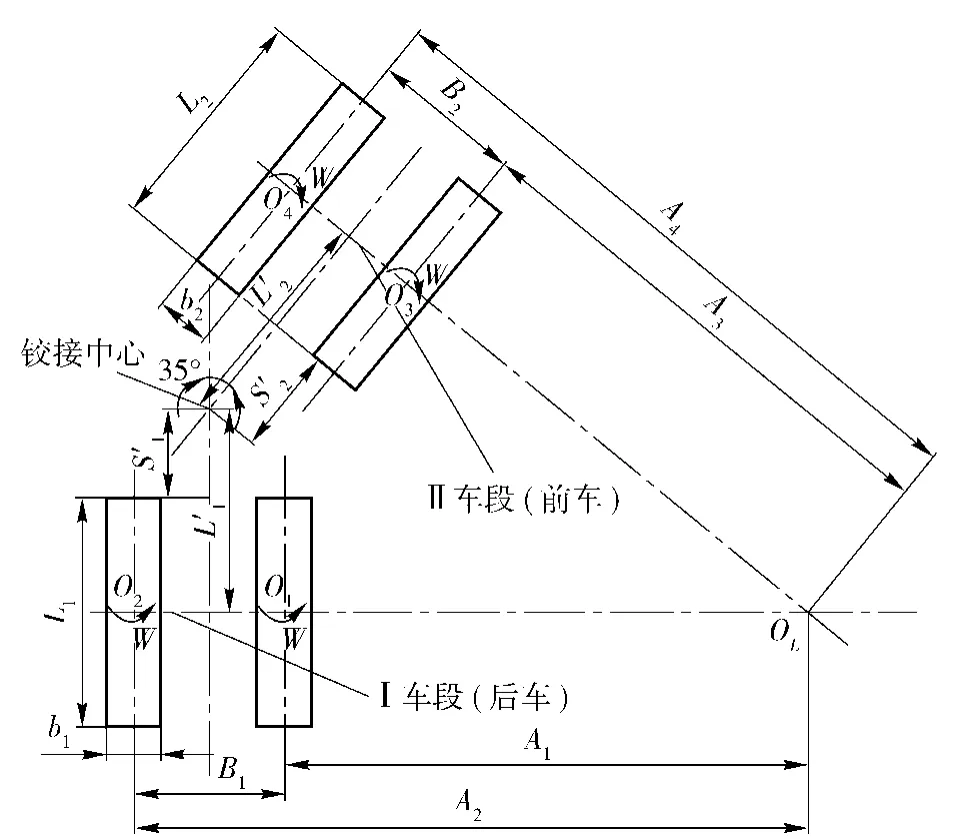
图3 转向受力分析Fig.3 Model of turning mechanism
在本车的计算中,由于驱动轮并不转动因而可视履带相对于车身的相对速度vx=0,且不考虑履带的滑转和滑移[8]。因此,将整车转向半径的中心OL视为前后车各个履带的速度瞬心及转向中心(如图3所示)。
履带在软路面上所受的力由两部分构成
1)履带与地面间摩擦引起的力;
2)由于履带下陷侧面推土产生的力。
以下分别予以讨论。
2.2 摩擦力引起的转向阻力矩
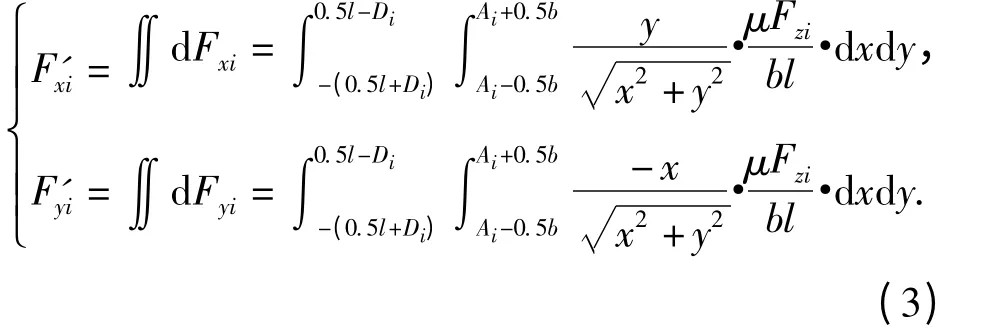
以履带接地面瞬心Osi为原点,Osi与Os的连线为Yi轴,过Osi平行于履带纵向轴线的直线为Xi轴建立左手直角坐标系(如图4所示),履带接地面的每一微元dxdy 上有微小摩擦力dFi作用,方向与该点绝对速度方向相反[9-10],有

式中:μ 为履带与地面间的摩擦系数;p 为接地比压,p=Fzi/bl;Fzi为作用在第i 条履带上的载荷。
dFi在Xi轴和Yi轴的分量为


图4 履带接地面受力图Fig.4 Forcediagram of track rub with the ground
由此可得牵引力及侧向力为
地面对履带的转向阻力矩Moi(绕履带接地面中心Oi)为

对于本车

现取后车质量M1=29 t,前车质量M2=29 t,g取9.8 m/s2.因此G1=G2=284.2 kN.

各履带的参数如表1所示。

表1 各履带参数Tab.1 Parameters of all tracks
因公式中含有二重积分,因此可用MATLAB 中的F(x)=dblquad 函数对其进行数值计算。将已知参数带入上述公式计算得

表2 履带与地面摩擦引起的力Tab.2 Force caused by track rub with the ground
2.3 侧面刮土阻力引起的转向阻力矩
1)模型建立
根据Bekker 推荐的压力沉陷关系,履带的沉陷量z 为[7]

式中:n 为土壤的变形指数;Kc为土壤的内聚模量;Kφ为土壤的摩擦变形模量。
若忽略履带侧面刮起土堆的质量,履带侧面的受力如图6所示。履带两侧任一单位长度上的推土阻力R 可从力的平衡式中得到
图中:N 为下部土壤对楔形土的作用力;C 为土壤单位面积上的内聚力F 为单位长度土楔重量;R 为单位长度推土阻力;θ 为破坏面角度;φw为板壁摩擦角;φ 为土壤内摩擦角。
因履带侧面刮起土堆的重力极小,故忽略不计。
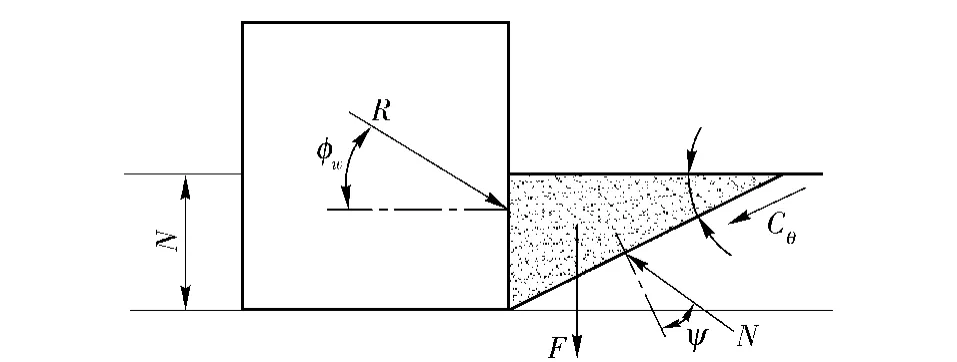
图6 履带侧面推土作用力Fig.6 Soil resistance caused by the flank of tracks
2)受力分析
由图有

式中,γs为土壤容重。
由(6)式解得

由于R 是θ 的函数,R 的最小值Rmin对应着一定的θ 值,在此θ 值时地面破坏,故侧面推土阻力产生的转向阻力为
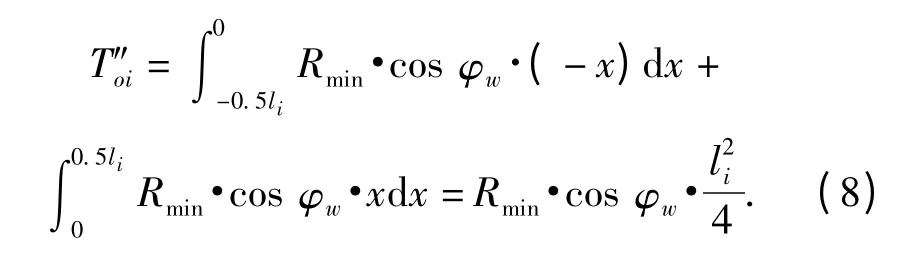
侧面推土阻力产生的侧向力F″yi为

因所取的分析条件为黏土环境,其相关参数如下表

表3 履带侧面推土力的计算参数Tab.3 Parameters of soil resistance caused by the flank of tracks
将以上参数带入Bekker 公式
对其进行通分化简,其简化模型为

对其求导并令R' =0,推导出当θ =14°时R 取最小值,将求得的θ 值再次带入R 的计算式求得R的值为:R3=R4=12.34 ×10-3kN/m.
同理可求出R1=R2=12.34 ×10-3kN/m.
由(8)式及(9)式可求得

表4 履带侧面推土引起的力Tab.4 Soil resistance caused by the flank of tracks
2.4 转向阻力矩的计算
1)履带所受合力计算
转向时履带所受合力为

2)求取转向阻力矩
由转向受力图知
式中,∑ToΙ、∑ToΙΙ为两节车体的转向力矩,最小值即为整车转向阻力矩。

图7 转向受力图Fig.7 Force diagram of articulated turning
将已知参数带入(11)式计算有

2.5 转向油缸受力分析
设油缸无杆腔直径为D,有杆腔活塞杆直径为d,系统所需压力为p,


图8 转向油缸受力分析Fig.8 Force diagram ofturning hydro-cylinder
由图8可推得
Fy其中sinθ
故,系统可提供的动力矩为

结合2.4 节的计算结果,当取D =180 mm,d =65 mm,p =16 MPa,L =840 mm,l =800 mm,S =984 mm 时,Mo=305 kN·m,满足设计要求。
3 俯仰机构计算
3.1 模型建立
为求得本车在关键点的几何尺寸需进行一定的简化,对上图中4 个三角形区域进行求解得
式中变量意义如图9所示。

图9 简化模型(尺寸变量)Fig.9 Simplified model size variable

图10 简化模型(抬头)Fig.10 Simplified model of pitching

图11 受力分析(抬头)Fig.11 Force diagram of pitching
3.2 受力分析
图中角度

前车受力分析,由图知
且对G1点
由

通过化简有

后车受力分析由图知

且对G2点

通过化简有

通过上述公式便可计算出FY1、FY2,俯仰液压缸所需提供的力即为两者最小值。
3.3 俯仰油缸受力分析
当图9中相关变量取如下数值时
a = 0.73 m;b = 0.697 m;c = 0.437 m;m1 =2.337 m;n1 =0.49 m;u1 =0.55 m;d =0.73 m;e =0.697 m;f = 0.478 m;n2 = 0.41 m;m2 = 2.96 m;u2 =0.378 m;v1 = 0.983 m;θ = 15°时,可计算得FY1=339.3 kN,FY2=361.2 kN.
为工程应用方便,通常将转向油缸及俯仰油缸取相同的参数,故当取2.5 节中转向油缸的参数时,可以满足设计使用要求。
4 试验研究
如图所示为采集的实车在黏土路况下静止铰接转向及以20 km/h 的速度缓行时,转向油路的压力变化情况。
通过图12 及图13 可以看出,原地转向时压力曲线在12 MPa 附近波动,因路面条件很难与计算中的参数完全一致,故上述计算过程及结果较为真实可信。通过两图对比还可看出,原地转向时液压系统压力较大,且压力波动也较缓行转向时大。

图12 原地水平转向压力曲线Fig.12 Pressure curve of horizontal turning in-situ

图13 缓行转向压力曲线Fig.13 Pressure curve of horizontal turning in low speed

图14 水平转向试验Fig.14 Test of horizontal turning
图15 所示为做抬头动作时的油缸压力曲线,该曲线1~3 s 为稳定工作区间,此时压力曲线在8 MPa附近波动,通过计算可知此时俯仰油缸可提供的拉力为354 kN,与计算结果大致相符。
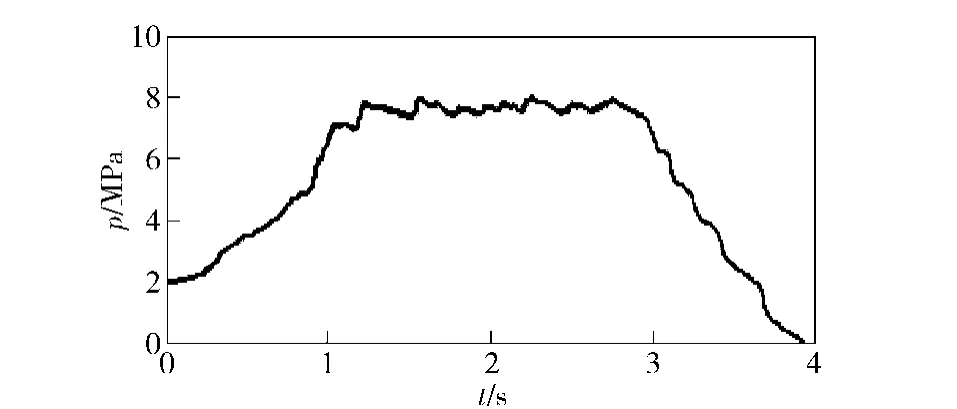
图15 抬头动作油缸压力曲线Fig.15 Pressure curve of pitching hydro-cylinder

图16 俯仰油缸测试试验Fig.16 Test of pitching
5 结束语
1)本文在对铰接履带车转向时受力分析、理论简化并确定其转向中心后,建立其数学模型。并在此基础之上推导出了该车履带与地面摩擦力及履带侧面推土力的计算公式,通过实例计算可以看出,当车辆在黏土路面转向时,摩擦力是引起转向阻力距的主要因素;
2)分析了履带式车辆通过铰接结构实现俯仰动作时的几何参数关系、受力关系,并得出了俯仰液压缸受力计算具体公式,并通过试验验证了分析方法和计算思路的准确性,为液压缸及液压系统参数设计和选型提供了理论依据。
References)
[1] Nakanishi T,Shabana A A.On the numerical solution of tracked vehicle dynamic quations[J].Nonlinear Dynamics,1994(6):391-417.
[2] 汪建春.铰接式装载机原地转向力学分析[J].煤矿机械,2009,(3):85-87.WANG Jian-chun.Mechanical analysis of insitu steering of articulated loader[J].Coal Mine Machinery,2009,(3):85-87.(in Chinese)
[3] He Y,Zhang X Y.Dynamics modeling and simulation for tracked vehicles[C]∥Proceedings of the 27th Chinese Control Conference.Kunming:2008,1:185-188.
[4] Gianni Ferretti,Roberto Girelli.Modelling and simulation of an agricultural tracked vehicle[J].Journal of Terramechanics,1999,(36):139-158.
[5] Anh Tuan Le.Modelling and control of tracked vehicles[D].Sydney:The University of Sydney,1999.
[6] Hansik Ryu.Dynamic modeling and experiment of military tracked vehicle[C]∥Detroit:SAE,2006-01-0929.
[7] 王国强,程悦荪,马若丁.铰接式履带车辆的结构参数对转向性能的影响[J].吉林工业大学学报,1997,(2):7-12.WANG Guo-qiang,CHENG Yue-sun,MA Ruo-ding.Impact of structure parameters on articulated tracked vehicles turning performance[J].Journal of Jilin University of Technology,1997,(2):7-12.(in Chinese)
[8] Zhang Y N,Ge Y S.Turning control and analysis for a tracked vehicle with electric transmission system[C]∥Detroit:SAE,2004-01-1592.
[9] 李春英,王斌.煤矿井下履带车辆转向阻力矩的计算[J].太原理工大学学报,2007,(4):336-338.LI Chun-ying,WANG Bin.Calculation of turning resistance moment with tracked vehicle in coal mine underground[J].Journal of Taiyuan University of Technology,2007,(4):336-338.(in Chinese)
[10] 王慧,侯友山,金纯.铰接车辆转向阻力矩的分析[J].矿山机械,2010,(1):38-41.WANG Hui,HOU You-shan,JIN Chun.Analysis for the monent of steering resistance of articulated vehicle[J].Mining machinery,2010,(1):38-41.(in Chinese)
猜你喜欢
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
科学与财富(2021年35期)2021-05-10
兵器装备工程学报(2021年3期)2021-04-09
中国新技术新产品(2016年21期)2016-12-08
科技视界(2014年6期)2014-12-24
专用汽车(2014年1期)2014-12-10
汽车零部件(2014年5期)2014-11-11
筑路机械与施工机械化(2014年3期)2014-03-01
筑路机械与施工机械化(2014年2期)2014-03-01
