新工科背景下智能机器人实训课程体系建设与探索
2024-06-01 06:01:48席佳乐霍亚光
知识窗·教师版 2024年3期
席佳乐 霍亚光
摘要:文章在新工科背景下,对智能机器人实训课程的现存问题进行剖析,从多学科交叉融合、虚拟与现实结合、课程与工程接轨三个方面出发,建设课程体系,搭建课程平台,并采用项目式教学方式分专业设计对应的课程项目,提出相应的评价体系,更好地发挥机器人作为典型机电一体化系统的特色和优势,培养学生的创新能力和解决工程问题的能力。
关键词:新工科;智能机器人;多学科交叉;项目式教学
近年来,为提高我国在全球化、智能化、数字化产业变革中的竞争力,满足现代工业发展对人才的多元化需求,国家在人才培养方面提出了一系列全面且具有深度的举措。2017年2月,教育部大力推行新工科建设,旨在培养学生的综合应用能力,对接未来工业技术的发展,培养出具有工程设计、实践、创新的卓越工科人才。
智能机器人是典型的机电一体化系统,以其为载体开展实训课程对工科专业学生具有重大意义。然而,随着新工科相关举措的深入推进,现有的智能机器人实训课程已经无法满足社会工程产业的需求。
一、智能机器人实训教学现状分析
为使学生深入了解智能机器人的控制系统和工作原理,多所高校相继开展了有关机器人的实训课程。然而,智能机器人实训课程对平台要求高,实训难度较大。笔者认为,目前的智能机器人实训课程主要存在三类问题。
第一,专业教学与实训课程无法有机结合。学生无法将实训课程和专业知识融会贯通,实训课程无法起到强化和辅助专业课程的作用。当前,机器人实训课程主要面向机械、自动化、信息等大类专业的学生开展,实训课程过于强调普适性教学,忽视了不同专业学生知识框架的差异性,课程设计比较笼统、单一,缺乏专业特色。
第二,实训内容与工程应用不匹配。开展实训课程是为了让学生将所学内容与真正的工程问题联系起来,提高对知识的理解和应用能力。高校设置的智能机器人实训课程多以演示如何控制智能机器人为主,缺乏对智能机器人实际工程问题的探索,学生经过实训后无法形成由实训内容向工程应用的转化,也无法搭建完整的工程思维框架。
第三,实训课程学生参与度低。本科教學的整体课程任务增多,教学计划中缩减了实训课程的时间,短时间内开展的智能机器人实训课程缺乏可探索性,难以调动学生的积极性,无法实现高水平的教学目标。
二、智能机器人实训课程整体建设
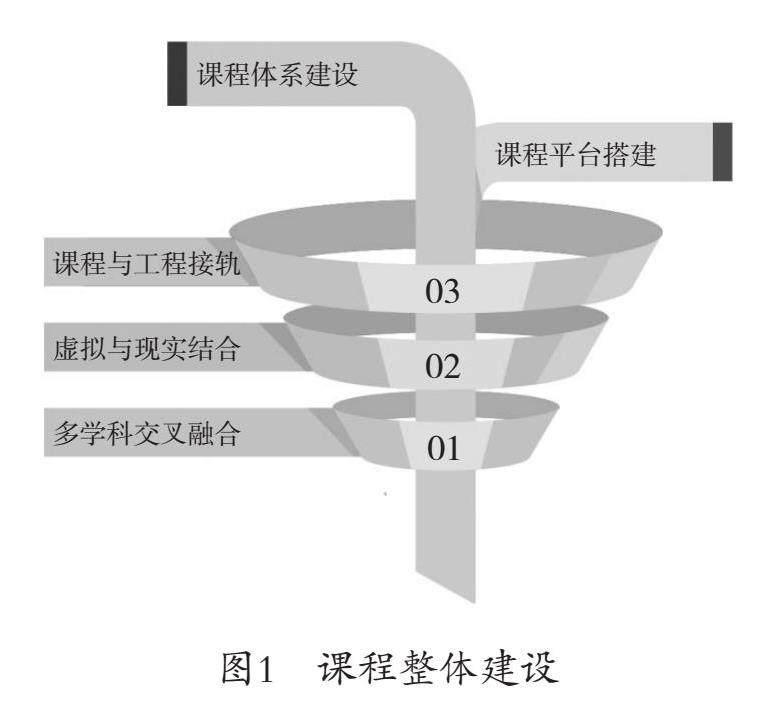
笔者认为,在新工科背景下,智能机器人实训课程的建设应聚焦实际工程问题。本文从课程体系和课程平台两个方面着手,从多学科交叉融合、虚拟与现实结合、课程与工程接轨三个方向,探索关于智能机器人实训课程的整体建设,如图1所示。在课程体系建设上,高校应注重实训课程的多适配性,使实训课程成为专业课程与工程问题之间的桥梁,同时以工程问题为导向设计实训教学内容,以培养学生解决工程问题的能力。在课程平台搭建上,高校搭建的实训课程平台必须集合虚拟与实操等多项实训设备,以满足整体课程体系的需求。
(一)多学科交叉融合
多学科交叉融合意指打破学科间的界限,整合多个专业的基础知识,以满足不同专业的实训需求。智能机器人实训课程体系需要分专业进行设计,一方面,将智能机器人实训课程按照专业分模块拆开,并依据专业特色有侧重地设计实训教学内容,整合出面向不同专业的特色智能机器人课程,为各相关专业提供可以灵活搭配的课程菜单;另一方面,设计综合实训内容,且综合实训内容以比赛形式进行,设计融合多类专业知识的比赛项目。
由于智能机器人实训课程计划面向机械、自动化、信息化三大类专业开展,所以在搭建课程平台时,高校需要考量各类专业的实训重点。例如,自动化专业要求学生自行完成各种电控元器件的组装,因此需要配备相应的电控搭建和测试平台,信息化专业需要配备相应的通信调试软件,机械专业则需要配备相应的设计和调试平台,以满足对机器人零部件的设计需求。
(二)虚拟与现实结合
首先,学生需要依托虚拟仿真平台,通过线上课程熟悉虚拟仿真过程,并在仿真软件中设计、模拟智能机器人运行姿态。其次,教师通过线下课程手动操作控制智能机器人对仿真结果进行验证和调试,在培养学生动手能力的同时,帮助学生构建起解决工程问题的思维框架。最后,虚拟与现实的完美结合,需要搭建一个完善的课程平台,且课程平台必须配备实训智能机器人、仿真模拟软件和相关测量调试设备,并利用网络信息与交流平台,提高平台的开放性和互动性,为学生提供更好的学习体验。
(三)课程与工程接轨
在建设课程体系、设计课程内容时,高校需要关注企业对人才的需求,通过校企合作的方式,依托实际工程项目,和企业共同完成智能机器人实训课程的设计。课程与工程接轨也为课程平台的搭建提出了新思路。首先,高校需要在校内搭建小型教学产线,使学生在产线上掌握智能机器人在实际生产中的工作方式,了解其工作原理。其次,高校通过与企业合作,让学生了解智能机器人在实际生产中的具体应用,以及亟待解决和探索的问题,让学生能够带着问题进行学习。最后,学生利用所学内容设计、改造智能机器人,对其功能进行优化。
三、课程内容设计和评价体系
依托长安大学现代工程训练中心平台,智能机器人实训课程设计四个部分的内容,其中前三个部分的内容分别围绕Boe-Bot(一种可以使用程序控制的智能小车)机器人、AGV移动机器人、六轴工业机器人展开,分为基础和进阶两个模块,基础模块设计的实训项目面向多类工科专业学生开展,使学生通过参与真实项目实践理解学科间的关联。
由于智能机器人实训课程主要面向机械、自动化、信息三类专业的学生开展,所以三个部分的进阶模块应在保持学科融合特色的同时对相应专业提高难度,加深学生对专业课程的理解。最后一个部分的内容为智能机器人的设计与改造,属于综合类项目,目的是培养学生团队协作和解决复杂问题的能力,由于完成该项目需要综合应用前三个项目的专业知识,所以采用组队竞赛的方式开展。
为了更好地评估学生的实训所得,指导教师须综合考量过程和结果,动手能力和创新能力,以及实际工程意义,给出综合能力评价与建议。此外,对于组队进行学习的项目,评价体系应分为队内自评、各组互评、教师评价。
(一)基于Boe-Bot机器人的实训课程
Boe-Bot是美国Parallax公司制造的智能机器人,采用BASIC Stamp 2(一种具有24个引脚的微控制器名称)微控制器作为机器人的大脑,基于BASIC(初学者通用符号指令代码)语言进行开发。其语法简单,容易上手,非常适合作为工科专业学生学习的入门机器人。基于其设计的基础模块项目包括机器人的基本巡航、机器人的胡须导航、机器人的红外线导航、机器人的寻光测试。
进阶模块项目主要面向自动化类专业学生开展,要求学生综合应用Boe-Bot机器人的基础功能,绘制电路图并搭建电路,在设有障碍物的校园地图上规划轨迹路线,测量路線距离,计算脉冲数,使Boe-Bot机器人在校园地图上通过循迹和避障的方式完成要求的打卡点数。
(二)基于AGV移动机器人的实训课程
移动机器人集成了机械工程、电子信息、人工智能等领域的研究成果,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它可以根据外界环境的变化,进行自主识别、推理和判断,在一定程度上自行修改程序,以达到最终设定的目标。
在基础模块项目中,学生需要在实训场地规划的三条机器人轨迹中,通过测量实训场地的路径和机器人的整体尺寸,在虚拟平台上绘制出机器人的相应轨迹并模拟其运动姿态,再通过输入简单指令,使机器人能够按照要求轨迹完成运动。
进阶模块需要应用PLC(可编程逻辑控制器)通信的相关知识,主要面向信息类专业学生开展,具体实训内容为AGV调度和物料运输,学生需要调试并优化机器人姿态,使用ModbusTCP(一种串行协议)协议建立PLC控制平台与AGV移动机器人之间的通信,控制移动机器人按照规划路径,以安全高效的姿态从起始点运行到终点并完成物料的运输。
(三)基于六轴工业机器人的实训课程
六轴工业机器人是一种可重复编程、多功能、多自由度的操作机器人,能够通过移动旋转等改变姿态,完成智能产线中夹持、放置工件的任务。六轴工业机器人多自由度、可编程控制的特点使其可以作为理想的机电一体化实训设备。
由于六轴工业机器人自由度较大,手动操作复杂,学生直接对其进行实际操作存在较大的安全隐患,所以基础模块实训项目主要采用虚实结合的方式开展,要求学生首先使用RobotStudio(一款机器人仿真软件)模拟控制六轴工业机器人,熟练掌握六轴工业机器人单轴、线性、重定位三种运动模式,调试六轴工业机器人的姿态和位置,优化程序,使六轴工业机器人以更为灵活安全的姿态完成物料的取放。
进阶模块的项目主要面向机械类专业学生开展,学生需要根据所提供物料的形状、尺寸等特点,使用RoboDK(一款机器人仿真软件)根据测量结果建立整体设备的模型,设计并组装机械臂及手爪,使其能够抓取一定空间内的物料。
四、智能机器人的设计与改造
本项目作为综合类项目,集成机械、电控、信息等各类专业知识,目的是让学生在实际工程项目中灵活运用各类机器人技术。项目以团队竞赛的方式开展,每个团队由机械、自动化、信息三类专业的学生组成,学生需要根据指定的物料特征,合作设计、制作一个具有物流运输能力的机器人,该物流机器人需要满足循迹、避障、抓取物料并精准投放到指定位置的功能。
总而言之,新工科理念的提出,为工科类专业带来了全新的视角和机遇,也对多学科交叉融合的智能机器人实训课程提出了更高的要求。
参考文献:
[1]冯慧娟,苗青,苗双,等.面向新工科的智能机器人教学模式改革[J].控制工程,2020(10).
[2]惠记庄,王帅,丁凯,等.智能制造人才培养创新模式:“两融合一贯通四促进”多元主体协同育人[J].高教学刊,2022(16).
[3]徐咏,覃曼萍,唐毓纳,等.新工科背景下智能机器人课程多元混合式教学改革与实践[J].软件导刊,2023(5).
[4]田思庆,杜云明,侯艳.新工科背景下自动化专业多学科交叉融合升级路径探析[J].黑龙江教育(理论与实践),2023(10).
[5]程彬彬.智能制造工程专业实验实训课程教学改革研究[J].西部素质教育,2023(22).
[6]黄建,李平.面向智能制造的“机器人技术”课程教学改革探索与研究[J].科技风,2022(9).
基金项目:中央高校教育教学改革研究项目“基于完全学分制的工程训练实践教学体系的改革与优化”,项目编号:BY202332。
(作者单位:长安大学现代工程训练中心)
猜你喜欢
计算机教育(2017年8期)2017-09-01 15:00:02
科技视界(2017年10期)2017-08-21 07:51:35
电脑知识与技术(2017年16期)2017-07-14 15:42:16
今传媒(2016年12期)2017-01-09 22:12:28
科学与财富(2016年29期)2016-12-27 22:46:17
科技创新导报(2016年23期)2016-12-23 09:53:51
计算机教育(2016年10期)2016-12-19 21:06:03
科技创新与应用(2016年33期)2016-12-17 15:49:59
博览群书·教育(2016年9期)2016-12-12 11:11:06
科技视界(2016年22期)2016-10-18 17:25:54