一种空中自主加油扰动建模与自适应控制方法
2024-05-27 06:46张冬王世鹏施明健王大勇朱家兴
宇航学报 2024年3期
张冬,王世鹏,施明健,王大勇,朱家兴
(1.复旦大学航空航天系,上海 200433;2.沈阳飞机设计研究所,沈阳 110035;3.西北工业大学自动化学院,西安 710089)
0 引言
空中加油是提升作战载荷、扩大作战半径的重要技术途径,同时能够有效解决飞机起飞质量与飞行性能之间的矛盾[1]。近些年无人机由于其高敏捷、低伤亡的特点被广泛应用于军事作战领域。但是无人机载弹量低且作战距离短,因此空中自主加油技术应运而生。空中自主加油技术能够大幅提升无人机的作战半径与续航时间,有效拓展无人机在军事领域的应用场景[2]。无人机的空中自主加油技术就是在大气紊流、加油机尾流、受油机绕流等干扰作用下完成对加油对象的准确定位以及对受油机位姿的高精度鲁棒控制。
自主空中加油过程主要包括:受油机接近加油机、受油机进入加油指定位置并保持、受油探管与加油锥套对接以及受油机保持与加油机的相对位置并完成加油,其中各阶段面临着大气扰动、加油机尾流、受油机绕流等干扰下的相对位姿定位、跟踪与保持控制问题[3-4]。动态逆是在非线性扰动影响下对接受油过程中常用的控制方法[5-6],文献[7]基于时标分离原则将飞行状态划分为姿态角组成的外回路和角速率组成的内回路,设计了基于过载控制误差的飞行控制律。文献[8]设计了一种全飞行模式适用的反演控制方法,利用扩张观测器解决模型中的非仿射项,采用动态逆实现升降襟副翼的控制。此外,基线控制律加补偿或自适应模块的方式得到了越来越广泛的应用,文献[9]设计了动态逆加鲁棒补偿的对接控制系统,利用动态逆方法设计制导律和控制律,然后通过H∞回路实现在线补偿;文献[10]基于模糊控制原理实现对PID 参数的实时调整,提升了对接控制阶段的飞行稳定性;文献[11]以LQR 比例积分型控制器作为稳定闭环,然后加入L1自适应控制器,使其在满足瞬态性能要求的同时,满足稳态精度要求。位置保持控制是受油机在对接前的等待阶段以及对接后的受油阶段共同面临的问题,文献[12]将涡流影响作为数学模型中的未知干扰,设计了自适应控制律实现未知涡流影响下的位置保持控制。文献[13]设计了抑制风场扰动的有限时间控制器,通过快速终端滑模面消除跟踪角误差,以保证空中加油过程的稳定编队飞行。
在目前的相关研究中,空中加油阶段大气扰动与尾流干扰等模型的理论描述已较为充分,但建立受油机的扰动动力学模型时,需要简化的、能描述特性的扰动等效模型;针对空中自主加油过程近距对接控制问题,目前空中加油控制方法通常采用制导、控制解耦设计的方式,但轨迹环与姿态环在非线性影响显著的空中加油过程中会存在无法忽略的耦合效应;此外,空中加油控制模块的扰动抑制功能多被设计为被动方法[14]。
面向空中自主加油控制,首先基于真实空中加油飞行受到的扰动特征建立了大气紊流、受油机绕流、加油机尾流等扰动的等效模型,以及加/受油机相对位置模型、受油机动力学模型;然后设计了一种包括轨迹环和姿态环的三回路动态逆控制框架;最后在姿态环设计了基于滑模干扰观测器的自适应干扰抑制控制方法。以动态逆为基线控制律,设计了基于超螺旋算法的二阶滑模干扰观测器实现对姿态外环扰动的补偿,同时设计了角速率观测器实现对角速率内环长时干扰的自适应抑制。
1 空中自主加/受油系统建模
1.1 加/受油机相对位置建模
规定空中自主加油系统的坐标系表示符号,大地坐标系为OGXGYGZG,受油机机体坐标系为OAXAYAZA,加油机机体坐标系为ORXRYRZR。通过受油探管和加油锥套来描述加/受油机之间的相对位置。其中加/受油机的机体坐标系重心位于相应的质心,大地坐标系的位置是任意的。
在受油机机体坐标系中,受油探管位置规定为:
则大地坐标系中受油探管的位置可以表示为:
式中:A为机体坐标系与大地坐标系之间的转换矩阵,由受油机的欧拉角ψ,ϑ,γ确定为大地坐标系中的受油探管位置为大地坐标系中的受油机质心位置。
大地坐标系下锥套的位置可以表示为:
式中:AR为机体坐标系与大地坐标系之间的转换矩阵,由加油机的欧拉角ψR,ϑR,γR确定为放下加油软管时锥套在加油机坐标系中的位置为大地坐标系中锥套位置为大地坐标系中加油机质心位置。其中:
加/受油机以及相应的加油设备相对位置如图1所示。

图1 加/受油机相对位置示意图Fig.1 Schematic diagram of the relative position of tanker and receiver aircraft
参考大地坐标系中锥套位置关系式(3),可以确定相对于加油机的由矢量给定的空间任意点的位置:
根据上述加/受油相对位置建模分析,可以确定受油探管和加油锥套的接触条件和脱开条件分别如式(7)和式(8)所示:
式中:RD表示锥套半径。
1.2 受油机动力学建模
受油机在空中加油过程中自主寻找加油机目标并实现加油设备的对接输油,在这个过程中重点关注受油机数学模型的建立。建立受油机的姿态动力学和位置动力学模型如下所示[15]:
式中:γ,θ,ψ分别为滚转角、俯仰角、偏航角;ωx,ωy,ωz分别为滚转角速率、偏航角速率、俯仰角速率;Sg,h,z分别为前向位置、高度、侧向位置;T为推力;,,分别为机体坐标系下的前向力、法向力和侧向力;Mx,My,Mz分别为滚转力矩、偏航力矩、俯仰力矩;Δmxvort和Δmzvort分别为加油机涡流对受油机滚转通道和俯仰通道的扰动力矩;Ixx,Iyy,Izz为三通道转动惯量,Ixy为惯量积;Vx,Vy,Vz为受油机质心速度在机体轴的三轴分量;ΔVy=Vy+Δwyw,ΔVz=Vz+Δwzw,Δwyw和Δwzw为高度方向和侧向气流干扰,其中Δwyw=FwakeΔwywind,Δwzw=FwakeΔwzwind,Fwake为加油机后尾流扰动影响函数,Δwywind和Δwzwind分别为高度方向和侧向的紊流干扰分量。
1.3 大气紊流对锥套位置影响建模
软管/锥套机构是加油机携带的柔性输油设备,外部大气扰动会对其产生无法忽略的影响。加油锥套和弯曲软管的运动动态研究是一个较为复杂的问题。在地面模拟空中自主加油的控制系统时,使用高阶模型会增加计算负担,因此可以使用简化模型描述由外部扰动引起的锥套位移来替代受扰过程,为工程应用提供有效参考。
考虑采用Dryden 紊流模型[16]来生成高度方向和侧向紊流干扰Δwywind和Δwzwind。首先选取均值为0、方差为1 的近似高斯分布随机数列[17],然后通过Dryden 谱密度函数生成成型滤波器,进而获得对应的紊流干扰序列。选取高度方向和侧向的紊流干扰谱密度函数如下所示:
式中:ωy,z为紊流的空间频率,Lwy,z为对应高度的紊流尺度,σwy,z为对应高度的均方根紊流强度,V为飞行速度。
得到高度方向和侧向紊流干扰序列后,采用简化的二阶动态环节来描述由大气紊流引起的锥套高度方向位移和侧向位移:
式中:二阶动态环节中的各参数取决于锥套的运动特性。
1.4 加油机尾流风扰及干扰力矩建模
加油机尾流的存在使得受油机接近加油锥套的过程中面临强烈的干扰,需建立尾流风扰等效模型以描述其对受油机的影响。加油机后尾流区域由取决于坐标和的影响函数Fwake确定:
式中:0 ≤fywake≤1,0 ≤fzwake≤1。则尾流干扰分量Δwydist和Δwzdist由下列工程模型决定:
尾流干扰建模侧重描述对速度系下迎角和侧滑角的影响,此外,受油机进入加油机尾部区域时,还会受到额外的滚转干扰力矩与俯仰干扰力矩,工程模型建立如下所示:
式中:0 ≤fxvort≤1,0 ≤fyvort≤1,为关于和变化的增益函数;zwing为机翼位置坐标的侧向分量;Kxvort和Kzvort为涡流参数;mxvort和mzvort分别为受涡流影响的滚转干扰力矩和俯仰干扰力矩的塑形函数,受与机翼坐标zwing之间的距离影响,决定了涡流干扰力矩的变化规律。
2 空中自主加油综合控制律设计
在软管式空中加油任务中,受油探管接近加油锥套的过程会使得加/受油机面临显著的外部气流干扰以及内部气动模型扰动。因此加油设备对接控制是最为重要的一环,包括位置跟踪保持控制和姿态对接控制。针对其中的姿态对接控制环,设计一种基于滑模观测器的自适应扰动抑制控制器,以实现高精度的空中自主加油对接控制。
基于滑模观测器的自适应扰动抑制控制以动态逆控制律为基线,引入滑模干扰观测器进行姿态环扰动补偿,同时在角速率环引入自适应干扰抑制模块,以提高对接控制器的精度和鲁棒性。
2.1 姿态环滑模干扰观测器设计
有多入多出仿射非线性不确定系统如下所示:
式中:Dlum(x,t)为集总干扰项,包括外部干扰和模型不确定性。
引入虚拟控制量Λ=ωd(xc-x),则受扰系统(16)的动态逆控制律可以写为:
在控制律(17)中,Dlum为未知量,导致控制量uδ在实际控制场景中无法求得。为了解决该问题,首先忽略其中的Dlum,得到标称控制律:
然后引入滑模干扰观测器来估计集总干扰Dlum以补偿标称控制律。设滑模干扰观测器的估计结果为,那么扰动补偿控制律可以写为:
综上所述,基于滑模干扰观测器补偿的动态逆控制律可以写为uδ=uδ,n+uδ,o。
设计一种基于超螺旋算法的滑模干扰观测器。单入单出超螺旋算法可以通过分析扰动非线性微分方程来获得[18]:
式中:ℵ(t)是未知有界扰动且≤Q,Q是扰动微分的上界;w1,w2为权重系数。当w1≥1.5Q且w2≥1.时,式(20)的解及其微分量均在有限时间内收敛至零[19]。对于多入多出情况下的|·|绝对值运算,规定对其各元素求绝对值,向量形式不变。
对于非线性不确定系统式(16),滑模扰动观测器可以构建为[20]:
对滑模面s求导,并将系统方程(16)代入,可得,因此将在有限时间内收敛于Dlum。其中向量的|·|1 2运算规定为对其各元素的绝对值开根号,向量形式不变。
基于奇异摄动理论,受油机状态变量可以分为快、慢变量,姿态角x1=[γ ψ θ]T为慢变量,角速率x2=[ωx ωy ωz]T为快变量。
面向慢变量,在基线动态逆控制律的外环引入基于超螺旋算法的二阶滑模干扰观测器进行外部扰动补偿。滑模观测器补偿下的动态逆外环控制律如下所示[21]:
式中:x2c表示动态逆外环的控制指令,即角速率指令组成的向量;下标s 表示慢回路中的变量。在具体计算中,常常引入增益矩阵Κs,使得x2δ,o等效于。
2.2 角速率环自适应干扰抑制模块设计
式中:Kω为内环控制律增益,ωc为期望角速率。将角速率动力学方程写为关于期望状态的比例形式,其余的所有项统一写为集总扰动项ε[22]:
式中:uadp为内环自适应干扰抑制项,且uadp=I-1ΔM,ΔM为抑制干扰的增量力矩向量。
对式(24)和式(25)作差求得误差动力学方程:
对微分方程式(26)进行拉氏变换:
定义自适应项uadp≜Kadp(s),Kadp为自适应干扰抑制增益。由定义式可以看出自适应项uadp可以抵消ε的长时影响从而实现对动态逆内环控制律的自适应干扰抑制,最终内环控制律可以写为:
综上所述,面向空中自主加油的基于滑模观测器的自适应干扰抑制控制器结构如图2所示。
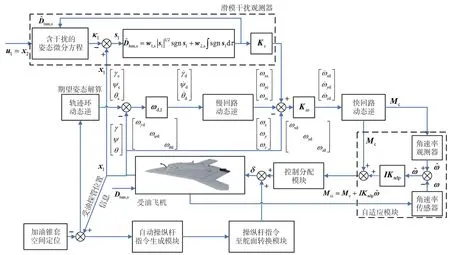
图2 基于滑模观测器的自适应干扰抑制控制结构框图Fig.2 Block diagram of sliding-mode observer-based adaptive interference suppression control structure
图2中,滑模干扰观测器的输入是外环集总干扰Dlum,s的观测值和控制量u1即x2,输出是外环补偿控制律x2δ,o;自适应模块通过角速率观测误差构造自适应项以抑制不确定性干扰。
3 仿真校验
3.1 气动扰动模型仿真校验
面向空中加油过程中的气动扰动建立了大气紊流干扰和受油机前绕流对锥套位置的影响模型、加油机尾流风扰等效模型以及涡流扰动力矩模型。
针对大气紊流扰动下的锥套位置偏移,采用Dryden 紊流模型生成高度方向和侧向阵风干扰,进而求出锥套高度方向偏移和侧向偏移。Dryden 模型的输入为飞行速度和白噪声,其中飞行速度取150 m/s,高度方向白噪声取随机数种子21 162,侧向白噪声取随机数种子51 161,功率谱密度幅值均取3.0。锥套高度方向和侧向位置偏移模型中二阶动态环节的各参数选择为:by=48.1,ay1=0.249,ay0=4.6;bz=41.7,az1=0.191,az0=3.87。得到紊流扰动下锥套在垂直面和水平面的位置振荡时序曲线,如图3所示。
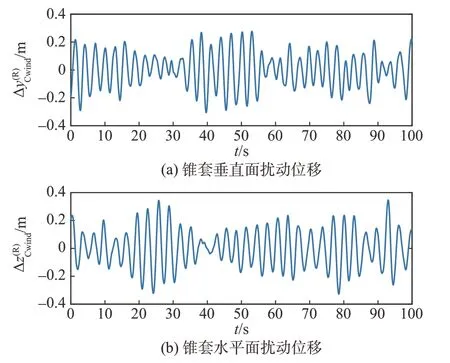
图3 紊流下锥套在垂直面和水平面的扰动位移曲线Fig.3 Displacement curve of the drogue on the vertical and horizontal planes under turbulence
对于加油机尾流扰动等效模型,基于试验数据可以得到高度方向影响函数fywake关于和的归一化数值分布区域,以及侧向影响函数fzwake关于和的归一化数值分布区域。在尾流影响区域内,与紊流扰动共同作用,对受油机的气流角产生影响。高度方向影响函数fywake和侧向影响函数fzwake的归一化数值分布区域图如图4和图5所示。
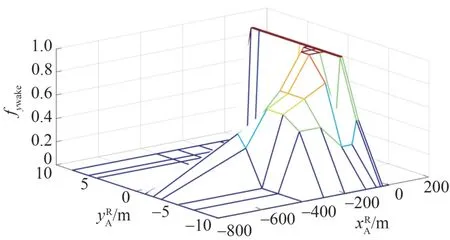
图4 高度方向尾流影响函数归一化数值分布区域Fig.4 Normalized value distribution area of the wake influence function in the height direction
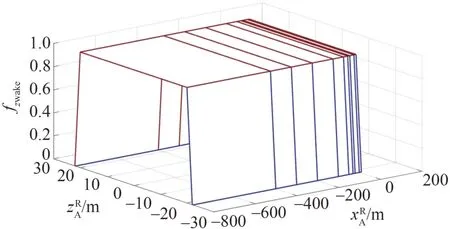
图5 侧向尾流影响函数归一化数值分布区域Fig.5 Normalized value distribution area of the wake influence function in the lateral direction
由加油机尾流对受油机的高度方向和侧向归一化影响函数的分布区域图可知,加油机尾流只会对处于其下方的受油机产生扰动影响,该扰动随着加/受油机相对高度和前向距离的减小而增大;尾流的侧向影响区域对称分布在加油机的左右空间,该扰动不随前向距离变化,但只影响处于加油机后方的受油机。
对加油机单侧左部涡流产生的扰动力矩等效模型进行仿真验证,涡流对受油机产生的扰动力矩等效模型中0 ≤fxvort≤1,0 ≤fyvort≤1;机翼坐标zwing取为20 m;Kxvort和Kzvort均取为0.1,可以得到加油机单侧涡流引起的扰动力矩系数与受油机到涡流中心距离的关系曲线,如图6所示。
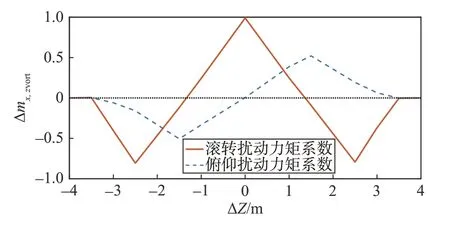
图6 扰动力矩系数与到涡流中心距离的关系曲线Fig.6 Function curve of perturbation moment coefficient about the distance to the center of vortex
由图6可知,处于涡心位置时,滚转扰动力矩系数达到正向最大值,而此时俯仰扰动力矩系数为0;距离涡心约1.5 m处,俯仰扰动力矩系数达到正向最大值。距离涡心约±2.5 m处,滚转扰动力矩系数达到负向最大值;距离涡心约-1.5 m处,俯仰扰动力矩系数达到负向最大值。
3.2 空中自主加油对接控制仿真校验
在空中自主加油过程中,受油探管接近加油锥套并实现对接输油的视景仿真结果如图7所示。
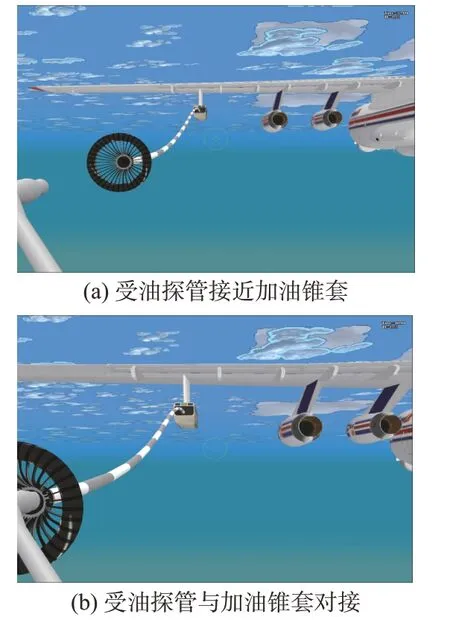
图7 空中自主加油视景仿真结果Fig.7 Visual simulation results of aerial refueling
图7展示了受油探管对加油锥套的跟踪与对接过程的视景仿真结果。
对接控制过程中滑模观测器对姿态环扰动的估计结果如图8所示。
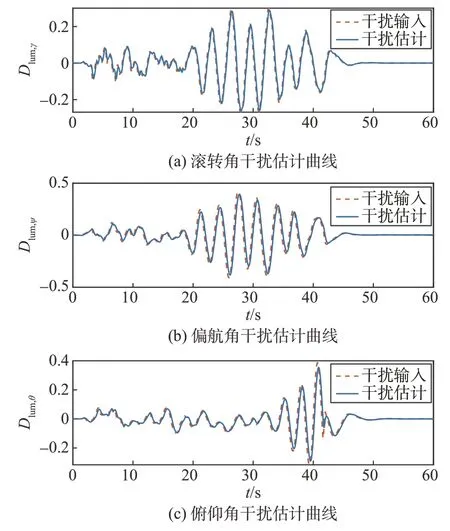
图8 基于滑模观测器的干扰估计结果Fig.8 Disturbance estimation results based on the sliding mode observer
图8中,对姿态角γ,ψ和θ中干扰输入的观测均方根误差分别为0.02、0.05 和0.03,说明所设计的滑模观测器能够有效估计姿态干扰。
采用基于滑模观测器的自适应干扰抑制控制方法和常规比例微分积分控制方法分别实现扰动情况下的空中加油对接,得到探管与锥套的位置变化曲线如图9所示。
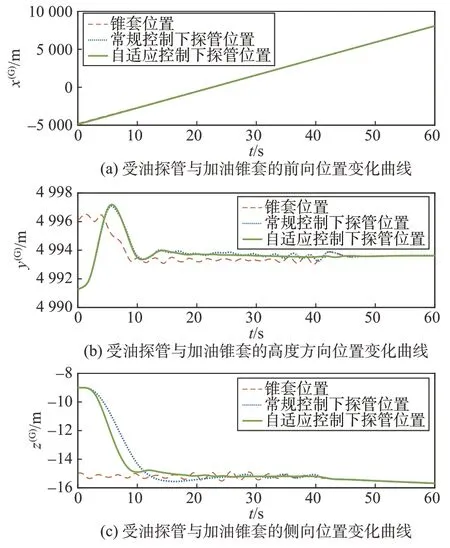
图9 加油对接过程中探管与锥套位置变化曲线Fig.9 Position change curve of the probe and the drogue during the aerial refueling docking process
由仿真结果可知,在45 s 左右实现了探管与锥套的对接,基于滑模观测器的干扰抑制控制方法相较于常规控制,具有降低0.3 m 高度波动的能力;在侧向跟踪控制中,探管首次跟上锥套的时间由16.3 s 降低到9.7 s,提升了68%。
对接控制过程中,两种控制方法下受油机的姿态仿真结果如图10所示。

图10 加油对接过程中受油机姿态变化曲线Fig.10 Attitude change curve of the receiver during the aerial refueling docking process
图10中,在25~45 s 的扰动区间内,所设计的自适应控制方法通过观测器估计扰动并进行抑制,有效减小了受油机的姿态波动,使γ和ψ的波动平均分别降低了94.8%和92.7%;在35~45 s 的扰动区间内,使θ的波动平均降低了14.9%。
空中自主对接控制中,受油机的舵面使用情况为滚转和俯仰控制使用复用舵面,偏航控制使用方向舵,各舵面的偏转情况如图11所示。
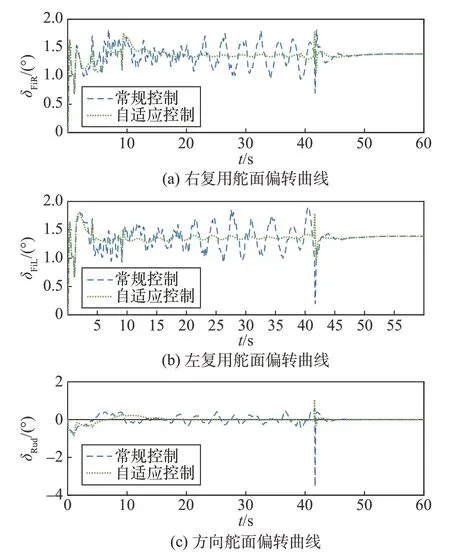
图11 加油对接过程中受油机舵面偏转曲线Fig.11 Control surface deflection curve of the receiver during the aerial refueling docking phase
图11中,δFiL和δFiR为左、右复用舵面偏转,δRud为方向舵偏转。自适应干扰抑制控制方法下,复用舵面和方向舵的偏转振荡得到了有效抑制,同时在45 s 左右的对接时刻,避免了出舵量的突变,保证了加油过程中的稳定对接。
4 结论
对于复杂气动干扰下的空中自主加油对接控制问题,本文建立了相关气流扰动模型,包括大气紊流和受油机前绕流对锥套位置的推离模型、加油机尾流风扰等效模型及其对受油机的扰动力矩模型,以工程模型的形式描述了复杂气动干扰,提升了地面仿真对真实工况的近似精度。同时,面向加油对接过程设计了基于二阶滑模观测器的自适应干扰抑制控制器,实现了基线动态逆的干扰抑制与补偿控制。通过综合视景仿真平台验证了该方法的有效性,能够实现受油探管对锥套中心的精确跟踪与对接。
猜你喜欢
河北农机(2021年12期)2022-01-06
文萃报·周五版(2021年33期)2021-09-12
活力(2021年6期)2021-08-05
文萃报·周二版(2021年5期)2021-03-02
科学技术与工程(2020年4期)2020-04-08
通信电源技术(2020年1期)2020-01-06
通信电源技术(2016年5期)2016-03-22
飞行力学(2015年3期)2015-12-28
汽车实用技术(2015年8期)2015-12-26
中国航海(2014年4期)2014-11-29