IM 公司奥德修斯号月面着陆器任务浅析
2024-05-27 06:46许健王平黄克武王丹赵毓余欢侯振东
宇航学报 2024年3期
许健,王平,黄克武,王丹,赵毓,余欢,侯振东
(北京空间飞行器总体设计部,北京 100094)
0 引言
新世纪以来,随着航天技术的不断发展,对月球探索的日趋深入,美、日、俄、印度等国都提出了载人月球探测的目标,并将月球的可持续发展作为了航天引领的主要方向,也是向更远深空迈进的阶段目标[1-2]。
北京时间2024 年2 月15 日14 时05分,美国直觉机器(Intuitive Machines,IM)公司IM-1 任务的Nova-C 级月面着陆器-奥德修斯号(Odysseus)搭载猎鹰9 号(Falcon 9)火箭,在NASA 肯尼迪航天发射中心的LC-39A 综合发射架发射升空。发射后约48 min,奥德修斯号着陆器进入预定轨道。北京时间2 月23 日7 时23分,奥德修斯号在历经长达8 天的发射、地月转移、环月飞行后,着陆于月球南极的马拉珀特A 陨石坑附近,成为了1972年阿波罗17 号以来第一个在月球表面软着陆的美国航天器。尽管奥德修斯号最终以倾倒状态着陆在一个地形倾斜12°的陨石坑中,且高速通信链路未能建立,但成功传输回了超过350 Mbit 的科学载荷数据,NASA 与IM 公司仍认为IM-1 任务取得了成功。
奥德修斯号为IM 公司的Nova-C 级月球着陆器首个产品,也是NASA 商业月球有效载荷服务(Commercial lunar payload services,CLPS)计划的第二次发射。IM-1 任务是CLPS 计划和阿尔忒弥斯登月计划[3]的重要组成部分,其目的是将12个载荷(其中6 个为NASA 科学载荷,6 个为商业载荷)运送至南极附近,同时验证液氧甲烷低温推进系统、精确着陆控制系统、LDN 通信服务等。本文旨在对奥德修斯号着陆器进行分析,总结其对我国航天事业发展,特别是载人月球探测任务的启示。一得之见,以期抛砖引玉。
1 航天器及任务概述
1.1 整器构型
如图1 所示,Nova-C 级着陆器高4.3 m,宽1.6 m,发射重量1908 kg,干重675 kg,最大月面载荷携带能力为130 kg[4]。着陆器原始设计为圆柱形,后由于载荷安装问题更改为切面为六边形的近圆柱体。着陆器共包含6 条着陆腿,展开后包络为4.3 m×4.6 m。其太阳翼不可旋转,具备最高788 W 的发电能力,在月面最高能够提供200 W 电力,搭载的科学载荷只在太阳翼接收到光照后启动工作。
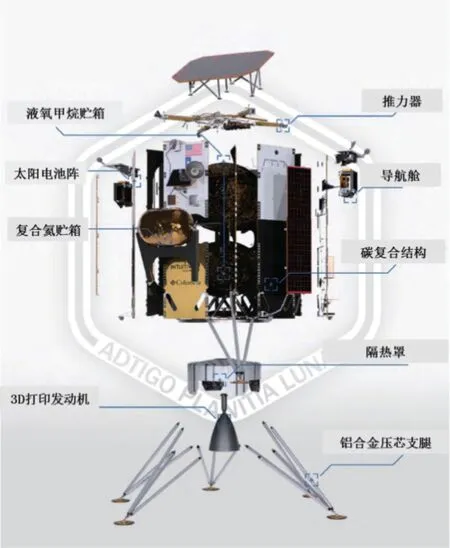
图1 奥德修斯号结构示意图Fig.1 Structure of the Odysseus
GNC 分系统配置IMU、光学导航系统和激光测距仪用于实现自主着陆和危险检测,着陆后仍能通过执行垂直起飞、巡航和垂直着陆等过程在第二个着陆点着陆。
Nova-C 最大的亮点为推进系统,是世界上第一个采用液氧甲烷低温推进剂的航天器,比冲320 s,主发动机推力3100 N。发动机继承了NASA 墨菲斯计划的技术,其VR900 挤压式主发动机使用甲烷和氧气作为液体推进剂,通过氦气增压,产生4000 N 推力。
1.2 飞行过程
如图2 所示,IM 公司为奥德修斯号整个飞行过程设定了16 个里程碑式成功标准。

图2 IM-1 任务飞行成功标准Fig.2 Success criteria of IM-1 mission
1)发射(Launch)
由SpaceX 公司猎鹰9 号火箭从NASA 肯尼迪航天中心的39A 发射场发射升空[5]。
2)器箭分离(Launch Vehicle Separation)
奥德修斯号与运载火箭第二级分离之后飞向月球,器箭分离过程如图3 所示。分离前奥德修斯号处于待机状态,分离后制导导航与控制(GNC)系统、自动飞行控制(AFM)软件、测控和热控系统开始工作。

图3 器箭分离照片Fig.3 Photo of probe and rocket separation
3)自主测试(Autonomous Commissioning)
在器箭分离后的几分钟内,奥德修斯号启动自主测试。首先,由GNC 系统使用冷氦气反应控制系统控制整器姿态,并通过星敏感器和太阳敏感器控制方向,使侧面太阳翼面向太阳。当太阳翼达到最大发电功率后,无线通信机开启,首次与Nova 控制中心建立连接。
4)发动机测试(Engine Commissioning)
在自主测试完成后,Nova 控制中心的飞控人员启动低温推进系统的液氧甲烷发动机测试。此发动机是本次任务的亮点。首先,将低温甲烷和氧气输送至发动机,以调节推进系统的温度。机载自动飞行管理AFM 系统监控点火时间(TIG)。在TIG的前几秒,反应控制系统控制燃料罐内的液态甲烷和氧气的比例。然后,主发动机点火器启动,点燃燃烧室内的甲烷与氧气。在飞行期间,航天器通过调整双轴万向环控制主发动机的角度,保持恒定姿态。
5)轨迹修正机动(Trajectory Correction Maneuvers)
在发动机启动后,飞控团队在每次变轨中使用B-Plane 坐标系评估当前奥德修斯号距离目标环月轨道的距离并及时修正,保证着陆器能够顺利被捕获,进入月球轨道。
6)月球轨道注入姿态机动(Maneuver to Lunar Orbit Insertion Attitude)
在3 次轨道修正机动时,飞控人员均将着陆器的高增益天线对准地球,保证与Nova 控制中心的高速通信。完成3 次机动后,奥德修斯号在进入月球轨道前通过RCS 系统进行逆向定向,发动机对准月球。
7)月球轨道注入(Lunar Orbit Insertion)
奥德修斯号以800 m/s 至900 m/s 的速度进入100 km 的圆形近月轨道,如图4 所示,并进行整器状态检查,做好着陆准备。

图4 奥德修斯号进入月球轨道后的回传照片Fig.4 Photo transmitted back after Odysseus entered lunar orbit
8)近月轨道(Low Lunar Orbit)
在每次环月飞行期间,奥德修斯号均有75 min的测控区,以及45 min 非测控区。
9)下降轨道注入(Descent Orbit Insertion)
奥德修斯号主发动机启动,将着陆器高度由100 km 降低至约10 km处,并以滑行方式接近着陆点。着陆器在10 km 高度处的回传照片如图5所示。下降轨道注入后1 h后,GNC 系统再次启动主发动机,进行动力下降。

图5 奥德修斯号10 km 高度时的回传照片Fig.5 Photo transmitted back by Odysseus at 10 km altitude
10)地形相对导航(Terrain Relative Navigation)
如图6 所示,奥德修斯号通过地形导航传感器和激光测距仪进行地形相对导航。
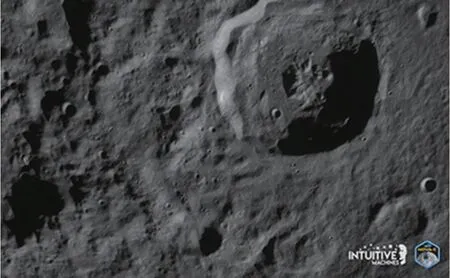
图6 奥德修斯号地形导航传感器回传照片Fig.6 Photo transmitted back by the terrain relative navigation of Odysseus
11)启动动力下降(Powered Descent Initiation)
奥德修斯号启动主发动机进行减速,到达距离着陆点大约2 km 处。
12)姿态调整(Pitch Over with Main Engine)
在动力下降段结束时,奥德修斯号使用主发动机控制着陆器俯仰角度,靠近着陆区。
13) 危险探测和规避(Hazard Detection and Avoidance)
奥德修斯号的自动飞行控制AFM 软件选择坡度最小的安全着陆点进行着陆,在此期间,发动机将进行连续功率下降调节,补偿推进剂重量的逐渐降低对奥德修斯号着陆的影响。
14)垂直下降(Vertical Descent)
如图7 所示,奥德修斯号的GNC 系统控制着陆器飞至距离指定着陆点(DLS)上方约30 m处,同时控制着陆器以3 m/s 的速度垂直下降。当着陆器距离月球表面10 m 高度时,着陆器的下降速度应减速至1 m/s。
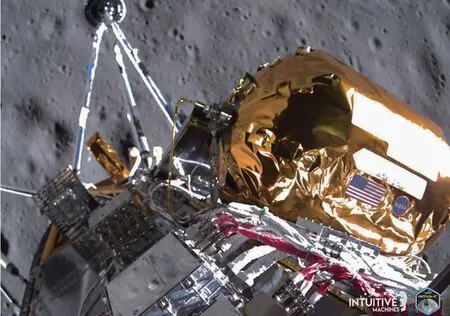
图7 奥德修斯号垂直下降阶段回传照片Fig.7 Photo transmitted back by Odysseus during the Vertical Descent
15)最终下降(Terminal Descent)
在最终下降时,受限于月尘影响,奥德修斯号仅使用惯性测量单元IMU 进行加速度感知。
16)着陆(Landed)
奥德修斯号预定以1 m/s 的垂直速度和0m/s 横向速度着陆,实际着陆情况如图8 所示,着陆时垂直速度为3 m/s,水平速度为2 m/s。着陆地点为马拉珀特A,即马拉珀特陨石坑的卫星坑,距离月球南极约300km。附近的马拉珀特山脉是NASA 阿尔忒弥斯-3 任务正在考虑的13 个候选着陆区之一。
图8 奥德修斯号着陆后的回传照片Fig.8 Photo transmitted back by Odysseus after landing
1.3 载荷配置
作为NASA CLPS 计划的重要组成部分,奥德修斯号在有限的空间内搭载了多达12 个载荷。其中6 个为NASA 的科学实验载荷,6 个为商业载荷[6]。本小节重点介绍6 个NASA 载荷。
1.4 任务评价
奥德修斯号着陆器在飞行过程中,经历了诸如激光测距仪无法打开、多普勒导航雷达数据无法使用、着陆腿折断等问题,但仍实现了美国在1972年后的首次月球软着陆,并传回了科学载荷数据。NASA 和IM 公司的联合发布会认为本次IM-1 任务完成了以下8 个重大成就[7]:
1)实现了阿波罗17 号以来的首次美国月球软着陆;
2)通过首次液氧甲烷发动机的深空点火以及多次重启,验证了公司专有的液氧甲烷低温推进系统的性能;Nova-C 成功实现全球首台挤压式4000 N空间液氧/液甲烷发动机点火,包括发动机全推力和变推力,比冲高达320 s,此为着陆器最大的亮点。液氧/甲烷理论比冲高达370 s,同时考虑易获取性,无毒性、以及未来行星表面原位资源利用的前瞻性,是未来深空探测航天器发动机技术重点关注的方向;
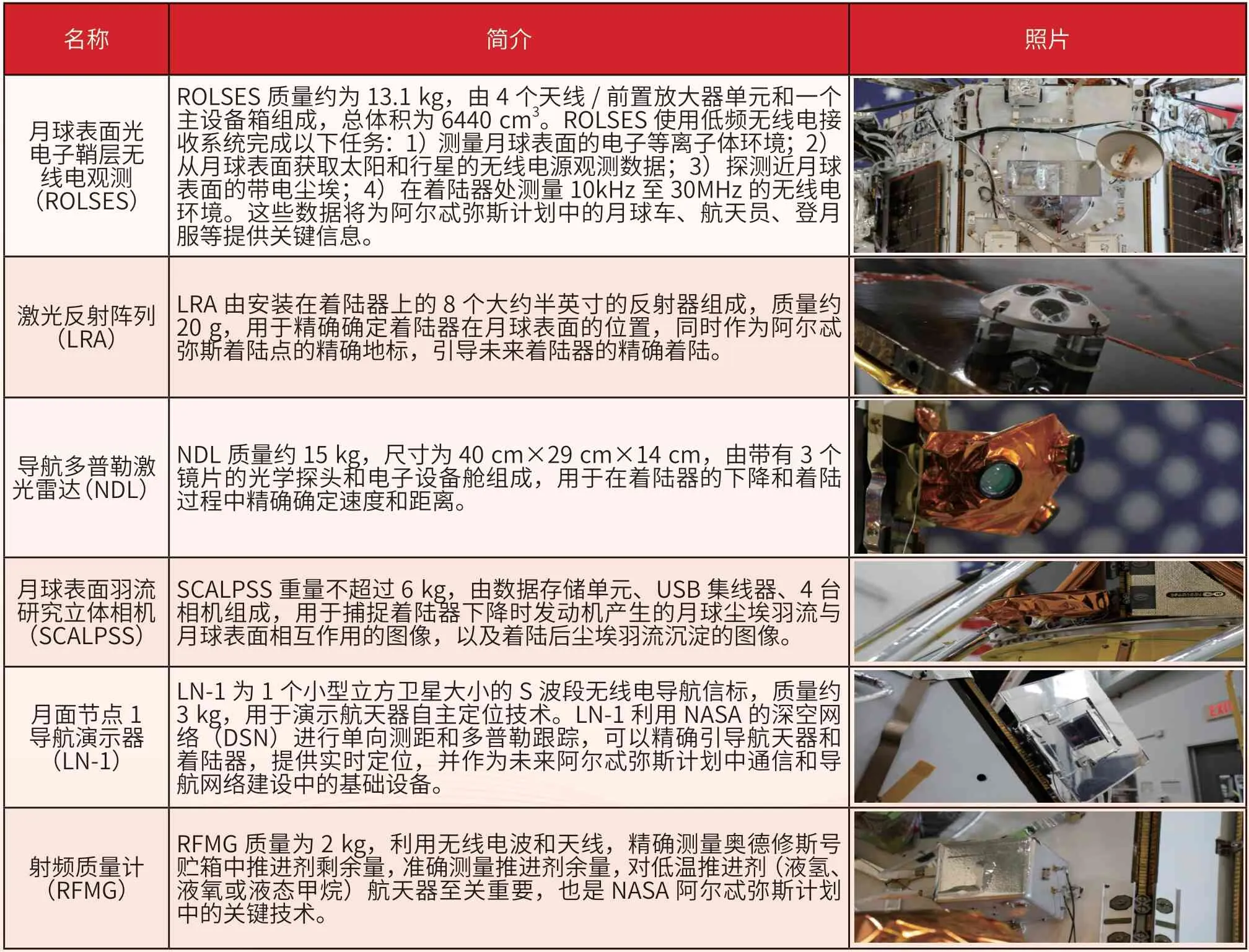
表1 NASA 载荷Table 1 NASA payload
3)成为首个成功在月球着陆并在地月间传输科学数据的商业领域公司和NASA CLPS 计划供应商;
4)着陆地点比现有其他任务着陆器都更靠近南极,为NASA 的阿尔忒弥斯计划载人登月任务打下基础;
5)飞行距离超过60 万英里(约合96.6 万公里),并在其预定的马拉珀特A 着陆区域内距离目标着陆点不到1.6 km 处软着陆,验证了其高精度导航功能;
6)传输了超过350 Mbit 的科学载荷数据;
7)超过了在月球表面运行144 h 的任务目标,于2024 年2 月29 日进入待机模式,并可能在下一个月球日重新唤醒;
8)根本上颠覆了登月经济学,向商业客户和NASA 展示了前所未有的经济性和效率。
2 故障梳理与分析
在奥德修斯号着陆器的飞行过程,发生了11次故障,影响了着陆器任务目标的实现。已披露的故障起因与处置措施,体现了商业航天公司鲜明的优势与劣势。
2.1 星敏感器故障
奥德修斯号进入地月转移轨道后不久,星敏感器失效,导致着陆器姿态控制与方向控制失效,开始翻滚,太阳翼发电效率和与地面的测控通信也同时受到影响,几乎导致任务失败。在通信恢复的短暂时段内,地面人员重置了星敏感器,此时距离奥德修斯号电池耗尽仅剩3 h。
2.2 激光测距仪失效
在计划着陆的几小时前,IM 地面Nova 控制中心对奥德修斯号落月相关的机载设备进行自检。地面人员将机载激光测距仪状态设置为“打开”,但遥测数据显示该设备并未进入工作状态。经分析,位于着陆器Bay2 和Bay5 的2 台测距仪的手动硬件保险均未打开。在发射前,地面工作人员未按要求解锁激光测距仪上的硬件保护装置。
在发射前的测试阶段,公司考虑到成本和时间约束,未对激光测距仪测试,同时工作人员也未仔细核对Checklist,导致该问题一直未被发现。
所幸,奥德修斯号搭载的NASA 的科学载荷NDL 可以提供速度测量信息,因此IM 公司组织了3 个小组进行软件改写工作,将NDL 的数据传输至星载导航系统,其中一支负责软件编制、一支负责软件测试、另一支负责远程注入,在1.5 h 内完成了正常航天软件开发中需要1 个月完成的软件改写工作。
然而,目前IM 公司认为,由于在修改星上软件时,并未复制数据有效标签,导致奥德修斯号的星载计算机无法处理NDL 发送的数据,因此奥德修斯号实际上是在没有准确高程信息的情况下,依靠IMU 惯性单元和地形模型,实施了盲降,接近月球表面时,着陆器认为它相对于月球的高度比实际高度高出了大约100m,导致其以3 m/s 垂直速度、2 m/s 水平速度完成了着陆,6 条着陆腿中的1 条折断,着陆器在2 s 后翻倒,着陆过程如图9 所示。

图9 奥德修斯号倾倒过程示意图Fig.9 Diagram of the tipping process of Odysseus
2.3 通信与供电受限
奥德修斯号的侧翻带来了一连串的影响,首当其冲的就是通信问题。如图10 所示,由于着陆器的侧翻,4 个天线中的2 个指向月面,造成与地球的通信受限,回传数据误码率极高,且高增益天线无法使用,导致传输速率极低(约为1.25 Kbps),在着陆60 h 后才回传第一张着陆照片,且传回的图像效果较差,如图11 所示。

图10 奥德修斯号着陆后照片Fig.10 Photo of the Odysseus after landing

图11 奥德修斯号着陆后回传的第一张照片Fig.11 The first photo transmitted back by Odysseus after landing
其次,奥德修斯号的顶部大型太阳翼由于着陆器的倾倒而无法对准太阳,此时仅能使用侧面单个太阳翼发电,仅有170 W 的发电能力,无法使用功耗为210 W 的高速Quasonix 发射机发送高速数据。
2.4 部分载荷失效
月球表面羽流研究立体相机SCALPSS 无响应,原因最大可能为着陆过程中受损。载荷Embryriddle Eaglecam 鹰相机虽被释放,但一直未与着陆器建立通信。IM 公司认为故障的最大可能为飞控上注软件后重启系统,初始化过程中EagleCam 相机参数被重置,导致未能完成对奥德修斯号下降过程的拍摄任务。
2.5 故障分析
综上所述,在奥德修斯号的故障及处置过程中,人为低层次质量问题较为突出。首先,因为发射时间和成本的考虑,放弃了对着陆至关重要的激光测距仪的测试,地面操作人员也未核对操作记录,导致出现了未解锁设备硬件保护装置的低层次错误,也险些导致整个任务的失败。星敏感器的故障原因目前暂未披露,但也可能是类似的错误。其次,备份冗余手段匮乏。激光测距仪无法打开后,奥德修斯号只能得到15 km 高度处的测量数据,通过叠加IMU 数据进行大致的高度估计,导致高程估计与实际相差100 m 以上。而在着陆完成后,由于高度不准确,同时缺少触月开关等其他判断落月的输入信息,发动机仍在开机工作,未能及时关机,可能也是导致后续倾覆和着陆器受损的原因之一。这些关键飞行事件中的关键单机均无有效备份,输入条件和判据单一,极易形成单点故障。
同时,也应看到商业航天在灵活性和效率方面的优势。尤其是在处置激光测距仪中失效问题时,反应快速且执行效率高,快速组成3 个团队,并与NASA 充分交流,了解载荷工作原理,在1.5 h 内完成了正常航天软件开发需要1个月才能完成的工作,这在传统航天领域是很难做到的。
3 对我国航天事业发展的启示
当前,商业航天蓬勃发展,包括奥德修斯号在内的诸如以色列Space IL 公司的创世纪号着陆器、日本iSpace 公司的白兔-R 着陆器、美国Astrobotic Technology 的游隼号着陆器等均已对着陆月球进行了尝试,虽然只有奥德修斯号近乎成功地实现了月球软着陆,但商业航天公司带来的别样思路和令人惊叹的迭代与发展速度,给我国航天事业的发展带来启发。
3.1 将商业航天发展战略规划纳入国家航天战略布局
美国商业登月公司的蓬勃发展主要得益于NASA CLPS 计划。此计划将在10 年内与数家公司签订总价值最高为26 亿美元的合同。目前已获得NASA 合同的公司有14家,本次发射奥德修斯号的IM 公司在2019 年与NASA 签订了1.18 亿美元的载荷运输合同。
为促进我国商业航天事业发展,应当借鉴阿尔忒弥斯计划,将商业航天发展纳入国家航天战略的顶层设计中,在国家航天发展战略中明确商业航天发展方向,全面覆盖长期规划和阶段规划,并从政策、布局等多方面扶持引导商业航天发展,引导和鼓励资本对商业航天的投资,并促进在基础设施建设和共用方面国家航天与商业航天的合作。
3.2 加快推进商业航天领域法律法规体系建设
美国政府自1984 年以来,对商业航天的支持已经上升到立法的高度,具有较强的约束力和指导作用。
当前,我国航天强国建设深入推进,航天强国建设目标连续写入党的十九大、二十大报告。在航天活动日益频繁,参与主体和方式多元化发展的背景下,需要加快推进航天法立法过程,加快航天领域重点法规及配套制度建设,从国家顶层设计的高度出发,用切实可行的法律法规指导和规范商业航天活动,促进商业航天公司的健康发展,提升我国航天产业整体竞争力。
3.3 增强传统航天与商业航天的合作与优势互补
阿尔忒弥斯计划和CLPS 计划为商业航天公司提供了广阔的市场和发展空间,而大量的商业航天公司又为NASA 的载荷运输、技术验证提供了廉价、快速、多样的解决方案,二者相辅相成,实现良性发展。
商业航天公司既是机遇,也是挑战。需要充分利用商业航天公司的灵活性和低成本,利用传统航天长期以来的技术和基础设施积累,配合国家政策和产业布局,快速进行大量低成本发射,偏重技术验证与新技术应用,进行充分地试错与迭代,获得大量的实测数据和故障数据,促进技术的快速进步。
3.4 借鉴商业航天经验,进一步完善生产管理标准体系
在增强与商业航天合作的同时,也应当正确认识并充分借鉴商业航天公司能够快速迭代和发展背后的深层次原因。商业航天的优势不应被简单地完全归结到不怕失败上,绝不是无限度的自由和随意。顶级商业航天公司,如SpaceX,每次星舰的改动之大,改动之快速,改动之有效,令人赞叹,但在看到技术上的大胆创新的同时,也应当明白,其背后一定有一套行之有效的生产与管理标准体系与方法论,能够保证勇于试错,充分调动创新的积极性,又能使创新和试错不至于成为脱缰之马,保证创新行之有效,试错举一反三。
在新技术应用与成熟技术继承之间,应当找到最适合于本任务实际情况和研制进度要求的平衡点,既保证任务的顺利完成,又避免技术和思路上的停滞不前顽固守旧。只有传统航天与商业航天优势互补、各取所需,才能促进整个航天体系的健康发展。
4 对我国未来月球探测开发的启示
当前,我国的探月工程已圆满完成了“绕、落、回”三步走战略目标,后续将继续开展面向更大区域和更长时间的无人月面探测活动,目前已全面部署开展嫦娥四期研制,包括嫦娥六号、嫦娥七号、嫦娥八号等任务[8];载人月球探测工程登月阶段任务已启动实施,计划在2030 年前实现中国人首次登陆月球,目前已全面部署开展各项研制建设工作,包括研制新一代运载火箭(长征十号)、新一代载人飞船、月面着陆器、登月服等飞行产品,新建发射场相关测试发射设施设备[9-13]。
定点安全软着陆是开启月面探测的第一步,纵览2024 年1~2 月美国、日本先后发射的游隼号、SLIM、奥德修斯号等任务,各个航天器并未真正取得成功,综合当前世界各国在月球探测的工程目标和任务实施情况,月球探测任务仍是技术难度高、成功率低的探测任务。
加强航天器可靠性、安全性设计,确保任务成功和工程目标实现,是月球探测开发的首要目标。
4.1 任务约束和系统协同设计
受限于地月空间几何关系和运载火箭单次运输能力,月球探测通常采用多个航天器联合执行的任务模式,如月背和南极任务需要月球中继星与嫦娥航天器协同,载人登月任务需要载人飞船与月面着陆器协同等,是一项复杂的系统工程,需遵循系统最优理念开展顶层参数设计、任务分配和各个航天器的协同设计。
受限于地月空间380 000 km 远距离和任务复杂性,航天器的自主管理设计尤为重要。同时,应关注地面测试对复杂飞行工况的覆盖性、故障预案的在轨可实施性、以及地面不可测飞行工况的仿真分析。
4.2 系统性风险和故障容限设计
关注任务的系统性风险,识别内外部存在的故障诱导因素,分析故障诱因出现后的关联影响,通过系统设计切断故障在系统内外的传递路径,加强航天器的故障容限设计,秉承“一重故障可靠、二重故障安全”的设计理念,发生一个或两个独立故障时,不发生从属故障(诱发次生故障),系统可正常连续运行,发生一次重复故障时,系统仍可安全工作(允许采取降级安全模式),关键设备原则上应具备“自身故障时可靠输出,输入临界时安全工作”的设计裕度,关注一重故障时,能源、测控通信链路的安全保底设计,方可实现故障安全。关键单机及重要载荷中的关键软件应具备在轨维护能力,通过在轨注入重构措施提高软件的可维护性,同时关注软件初态和可持续程序加载区的状态保护,确保软件重构时的设备安全工作底线。
奥德修斯号使用NDL 雷达载荷进行高度测量,通过软件可维护和多源信息融合设计,实现关键飞行阶段传感器可靠性与冗余设计,进一步提高航天器系统最优和可靠性。
对于无人航天器,可通过一体化硬件平台或通用总线、网络等接口,打通平台和载荷的信息接口,有效应用平台和载荷的多信息融合技术,最大化利用各类载荷的敏感器测量信息,提升系统的灵活性和容错能力;对于载人航天器,应避免载荷对平台的安全性影响,对平台关键设备采用冗余备份或异构备份,加强平台可靠性设计确保航天员安全。
4.3 商业合作和人类地外长期生存关键技术验证
奥德修斯号的6 个NASA 载荷中,有5 个均与未来的阿尔特弥斯载人登月计划密切相关,或作为技术与原理验证,或作为先期关键数据获取,有的甚至直接作为阿尔特弥斯计划的基础设施。
对于我国的未来的月球探测开发,应充分借鉴利用低成本商业飞行任务,支撑月面大规模建设主线活动,是建设月球科研试验站的有益补充。充分利用商业合作和先进民用技术、无人飞行试验先行验证载人飞行和月球科研试验站建造,逐步突破人类地外长期生存的关键技术。
5 结束语
本次IM 公司奥德修斯号月面着陆器的任务实施,引起了世界各国的高度关注,一方面展示了商业航天在月球探测开发的蓬勃发展和商业模式,一方面也凸显了月球探测任务系统设计实施的高技术难度、高风险和低成功率。结合我国未来月球探测开发任务,提出3 方面建议:
1)融合商业航天取长补短,加速新技术发展
无人月球探测可充分利用商业航天的低成本、快速迭代、大胆试错创新等优势,积极加强合作,吸纳商业航天资本,利用商业航天完成短平快的技术积累与验证,并以低成本方式完成大量的基础设施建设。同时,也应当认识到商业航天的发展现状,避免盲从,在载人月球探测任务中坚持质量第一理念,在载人航天器研制中以人的安全为本。
2)秉承严慎细实,确保系统可靠性
当前世界各国的月球探测开发仍然是高技术难度、高风险和低成功率的阶段,秉承严慎细实、确保系统高可靠设计并圆满完成既定任务,才能获得高效率、高效益的回报。
在航天器设计,应当充分识别全任务阶段可能的故障工况,关注可靠性与冗余设计、故障容限设计、自主智能管理、技术状态控制、地面测试覆盖等,确保航天器设计可靠性和安全性能够应对多种复杂工况,确保每次工程任务目标的实现。
3)提前启动,早日突破地外生存关键技术
月球探测开发仍存在诸多为突破的关键技术,提前启动,合理统筹远期规划,在地外天体着陆发射、能源、信息、极端环境生存与辐射防护、大型基地基础设施建设、原位利用等方面需尽快开展方案论证和关键技术攻关,利用无人飞行任务开展验证,早日实现人类的长期地外生存远景目标。
猜你喜欢
军事文摘(2022年12期)2022-07-13
飞碟探索(2022年1期)2022-03-12
军事文摘(2021年18期)2021-12-02
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
青年文学家(2017年12期)2017-05-18
视野(2016年19期)2016-09-30
剑南文学(2016年14期)2016-08-22
读者(2016年13期)2016-06-08