面向冷链的四向穿梭车关键结构设计与可靠性分析
2024-05-08 06:15张洪鹏王子豪
现代制造技术与装备 2024年3期
张洪鹏 王 成 王子豪 刘 振
(济南大学 机械工程学院,济南 250022)
冷链物资自动化立体仓库是一种利用高层货架存储冷链物资的新型仓储设施。目前,我国智能立体仓库的建设刚刚起步,体系还不完善,特别是适用于冷链仓库的自动化搬运设备十分匮乏。
PLOEG 等人设计一种新型的四轮自动导引车(Automated Guided Vehicle,AGV),并对其进行系统仿真研究[1];AMATO 等人对穿梭车的使用进行了优化设计[2];GUO 等分析了穿梭车自动存取系统的性能[3];白光利通过调研目前市场冷库自动化应用案例并通过重点分析四向穿梭车立体库与堆垛机立体库,指出自动化立体库是未来冷库运营发展的趋势[4]。
四向穿梭车具有结构简单、运输方便的特点,虽然其在烟酒等轻载行业已经得到广泛应用,但是在冷链肉类仓储等方面的应用中存在不足。冷冻肉类出入库的频次高、吞吐量大,因此要求设备有较好的可靠性、疲劳寿命,而目前大多数穿梭车设备无法满足需要[5]。因此,自主研发适用于冷链的智能仓储四向穿梭车,有利于进一步推动物流行业的发展。
1 传统四向穿梭车介绍
传统四向穿梭车的控制系统采用的是可编程逻辑控制器(Programmable Logic Controller,PLC)[6],行走系统采用的是链条与链轮组合,举升换向系统采用的是齿轮齿条组合。传统的四向穿梭车的设计已不符合当下冷链仓储的要求,在机械结构方面主要体现在以下方面。第一,传统链条组合链条易松动,涨紧链轮易断裂,导致穿梭车定位不准确且后期维修保养麻烦。第二,齿轮齿条举升机构仅适用于低载环境,设计中将用于冷链肉类食品的出入库,承载质量达1.5 t,因此亟须一种新的举升换向机构来代替传统机构。第三,设计用于-26 ℃冷库,设备的泊松比和弹性模量等都会改变,因此需合理设计设备结构及低温验证。现有传统四向穿梭车的组成部分如图1 所示,部分性能指标如表1 所示。
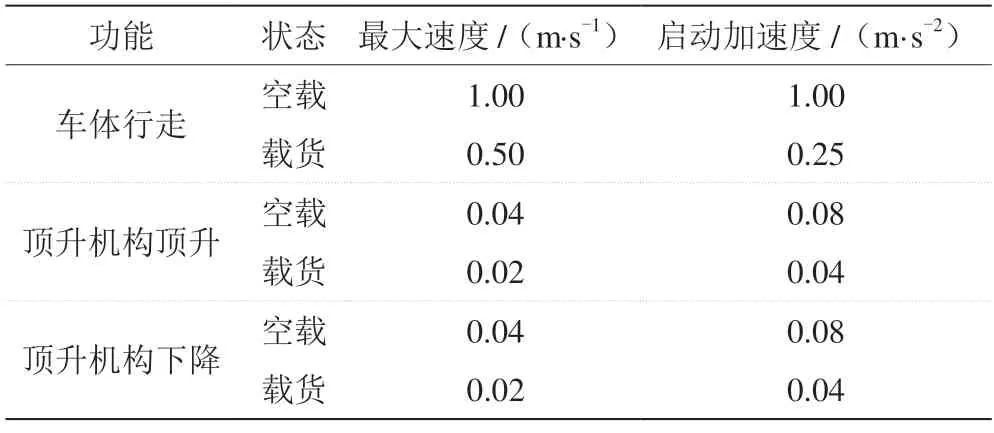
表1 现有四向穿梭车部分性能指标
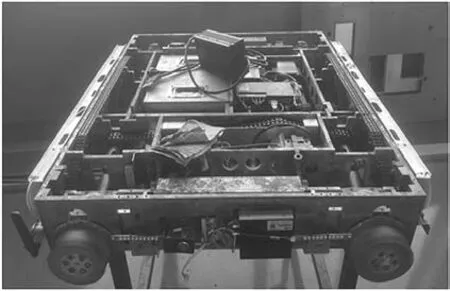
图1 现有四向穿梭车
2 四向穿梭车系统设计
设计的新型四向穿梭车的机械系统结构,包括行走机构、换向机构等。在UG 软件中建立三维模型,并利用ANSYS 软件进行有限元分析和关键部件优化设计。
2.1 X/Y 向行走机构设计
四向穿梭车行走机构的主要作用是让穿梭车沿着子母轨轨迹直线运动,其设计直接决定穿梭车是否能平稳运行。选用齿轮结构代替传统链轮结构,比链轮更稳定,使传动平稳、清洁、无摩擦和能耗、无油污、防尘防水,可以大幅降低长期维护成本,提高传输系统的可靠性。行走机构三维图如图2 所示。

图2 四向穿梭车行走机构三维图
2.2 举升换向机构设计
四向穿梭车采用不完全齿轮加凸轮升降换向机构。该机构不仅可以实现穿梭车穿越轨道平稳、快速的方向切换,而且节省换向时间。举升换向机构如图3所示。

图3 四向穿梭车举升换向机构三维图
2.3 三维建模与关键零部件的有限元分析
四向穿梭机三维模型的整体外观如图4 所示。建立四向穿梭车关键结构部件的有限元参数模型,基于ANSYS 软件分析其在-26 ℃的刚强度校核和疲劳,并进行关键结构部件的优化设计。
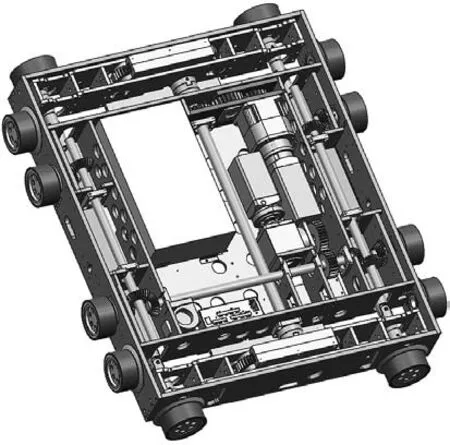
图4 四向穿梭车整体三维模型
四向穿梭车的升降机构等部件在运行过程中会承受较大的应力,其性能将影响存取货物的效率和工作的可靠性。采用ANSYS 软件对设计进行优化,使顶升板等关键部件在满足结构强度和刚度条件的同时,尽可能节省材料、降低成本。优化前后顶板在-26 ℃条件下的最大应力云图如图5 所示,优化后顶板总变形图如图6 所示。

图5 顶升板优化前后的最大应力云图

图6 顶升板优化前后总变形图
由设计点可知,该装置的最小变形为1.657 4 mm,最大变形为3.731 6 mm,最小等效应力为275.33 MPa,最大等效应力为362.42 MPa。为了更好地选取顶升平板的各项数据,需要分析举升板长D1、宽L1、厚H1与整体变形量和最大等效应力之间的对应关系,其中举升板的长宽与变形和应力的三维响应面如图7 所示。

图7 D1、L1、H1 与变形、应力三维响应面
优化前顶升板所受最大应力为38.5 MPa。经过计算设置优化条件与参数得到顶升板的结构尺寸最优解,优化后的变形为27.2 MPa,优化后的最大变形为2.2 mm。
3 样机实验
3.1 性能指标设定
四向穿梭车的性能指标如表2 所示。该四向穿梭车的续航时间为7~8 h,车体高度为140 mm,充电时间为2 h,使用温度为-26~20 ℃,额定承载质量为1 500 kg。
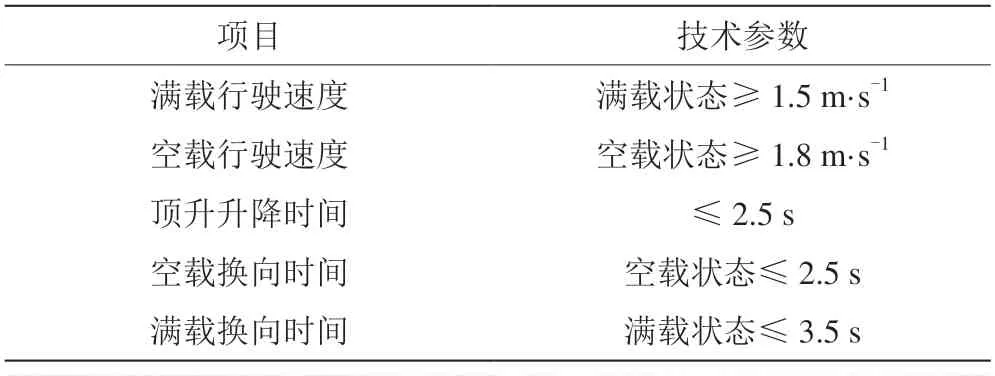
表2 性能指标
3.2 整车性能测试
通过以上的研究,制作出面向冷链立体仓库的新型四向穿梭车样机,如图8 所示。通过样机试验验证四向穿梭车的行走、举升方案的可行性,并进行可靠性实验验证四向穿梭车的可靠性。经多个工作任务与实际测量,验证该四向穿梭车均满足各项技术指标,整车在冷库中运行良好,满足使用条件。

图8 四向穿梭车样机
4 结语
根据目前穿梭车存在的不足,针对四向穿梭车的机械结构,设计了一种新型四向穿梭车,通过实验验证该四向穿梭车达到了冷库运行的基本条件,对于冷链立体仓库的穿梭车结构设计研发具有一定的参考价值。
猜你喜欢
煤(2024年3期)2024-03-13
今日农业(2022年15期)2022-09-20
农业装备与车辆工程(2021年8期)2021-08-28
现代信息科技(2021年21期)2021-05-07
南方农机(2021年1期)2021-01-20
家禽科学(2020年8期)2020-10-09
港口装卸(2020年3期)2020-06-30
老年教育(老年大学)(2019年9期)2019-01-13
酒·饮料技术装备(2018年1期)2018-04-28
制造业自动化(2017年2期)2017-03-20