
基于山地丘陵地区农机行走机构设计研究*
2021-01-20 11:41:46刘莉滋王海宝
南方农机 2021年1期
王 辉 , 傅 杰, 王 俊, 刘莉滋 , 王海宝
(1.重庆三峡学院机械工程学院,重庆 404130;2.智能制造先导技术重庆市高校工程研究中心,重庆 404130)
作为农业大国,我国的总耕地面积大。 据统计,山地丘陵、高原地区占全国耕地面积的70%左右,平原、盆地约占30%, 我国山地丘陵的户籍人口占全国总人口的5成以上,其粮食产量占全国的3 成以上[1]。 南方大多省份的农业开发水平远不如北方平原地区, 山地丘陵地区农业机械化水平发展相对较差[2]。
目前, 国内市场大多数平原地区的农机不适应在山地丘陵地区作业,而我国山地丘陵地区较多,坡度较大,特别需要能完成高起伏作业的中小型农业生产运输机械来进一步开发山地丘陵地区的农业生产发展力。 在此基础上, 研发一款适合山地丘陵地区的行走机构来提高山地丘陵地区的农业机械化水平、安全性,是很有必要的。本文针对三峡库区山地丘陵地势特点, 研究一种具有良好通过性的行走机构, 解决山地丘陵地区农业机械通过性差的问题。
1 山地丘陵地区农机现状
1.1 国内外研究现状
国外适用于山地丘陵的农机由军事领域演变而来,其最大的特点在于可以在丘陵山地间自如的完成机械作业,发展到现在,国外朝着大型化、自动化的方向发展[3-4]。
最早进行山地丘陵农机行走机构的是西方的发达国家, 在20 世纪末他们就能做到在27°的坡度上进行正常的作业,现在已发展到比较成熟的阶段[5]。 与我国情况相近的日本,现其农机大多采用履带式,具有更小的转弯半径的同时增加农机的通过性,且越来越趋向于一体化[6]。
我国山地丘陵农机的研究起步较晚,且我国的农业机械化水平较低,能够适应山区机械作业,越障能力好的农机较少[7]。 直到“十一五”之后,国家加大了农业机械化方面的研发投入,加快了农业机械的发展。
1.2 现有农机行走机构优缺点
现有用于山地丘陵的行走机构一般为履带式行走机构,对比轮式的行走机构,履带式行走机构有着与地面接触面积大、转弯半径小等特点。 而履带式行走机构一般分为普通型和摇臂式行走机构。
1.2.1 普通型行走机构
普通型行走机构爬坡越障示意图如图1 所示。 图1(a)表示农机前沿与障碍物接触,开始越障;图1(b)表示农机越障时,农机重心未超过障碍履带与障碍物接触;图1(c)表示农机越障时,农机重心超过障碍物;图1(d)表示农机完全越过障碍物边缘,越障完成。

图1 普通型履带农机行走机构工作示意图
普通型履带行走机构的优点在于其易于操作,结构简单,但缺点也很明显,它的越障能力不是太好,跨越障碍的高度往往取决于开口的角度和农机自身的重心位置。
1.2.2 摇臂式行走机构
摇臂式行走机构爬坡越障示意图如图2 所示。 图2(a)表示农机前摆臂碰到障碍物,开始越障;图2(b)表示农机重心没有超过障碍物时, 通过前摆臂与后摆臂的配合越障过程;图2(c)表示农机重心超过障碍物时的越障过程;图2(d)表示农机完全爬上障碍物,越障完成。
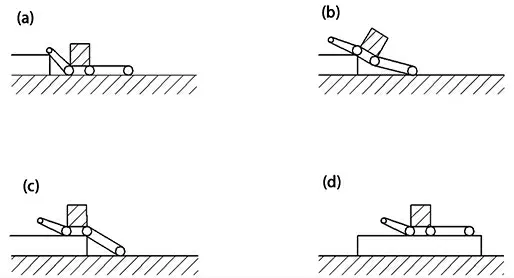
图2 摇臂式行走机构工作示意图
摇臂式履带行走机构的优点在于它有着良好的越障能力,缺点在于其结构相对较为复杂,前后摆臂的控制较为困难[3]。 所以,本文旨在设计一种在越障能力与控制上都有一定优势的行走机构。
2 两段式独立履带行走机构的设计研究
2.1 两段式独立履带行走机构结构设计
针对山地丘陵耕地的地貌特征, 设计的两段式独立履带行走机构的三维图如图3 所示,图4 为其二维图。 该行走机构包括底盘框架结构、导向轮、履带、前支架、前主动轮、支撑轮、前履带浮动支撑架、从动轮、后履带浮动支撑架、后支架、后主动轮、连接杆、减震器等结构。 此农机爬坡越障行走机构车架上固定有4 个减速电动机,分别驱动两个前主动轮和两个后主动轮, 通过对减速电机的控制,能完成转向的工作,且有较小的转弯半径。 四履带之间爬坡越障时中间的从动轮会随履带运动上下浮动。 该设计的优点在于4 个电机可以提供更强的驱动力, 相较汽油机和柴油机更加环保,也更容易控制。 这种机构具体的工作过程为:当在平地行走时,前履带和后履带在同一平面,前主动轮和后主动轮同时驱动;当爬坡时,前履带遇到障碍向上倾斜, 让前履带与后履带中间部分向下突起,使履带更大程度的接触地面,达到爬坡的效果;当下坡时前履带向下倾斜,让前履带与后履带中间部分向上凸出来更大程度的让履带和地面接触,达到下坡的效果。 通过减速电机驱动,有更好的驱动效果。 两侧的履带能根据地形自动的进行适当调整,可以满足更复杂地形作业的要求并充分发挥两侧履带的驱动力,使履带车的通用性及适应性得到提高。
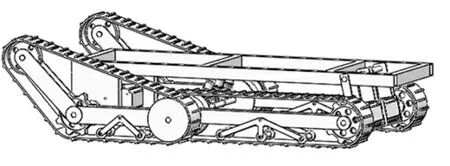
图3 两段式独立履带行走机构的三维图

图4 两段式独立履带行走机构的主视图和俯视图
2.2 两段式独立履带行走机构研究分析
两段式独立履带行走机构主要改进了一般摇臂式行走机构的缺点,增强了前后履带的配合度,在遇到障碍物时能自动的适应地形,进行仿形,且采用4 个独立电机以达到比较精准的控制。 相较于普通型行走机构结构也不算太过复杂。 两段式独立履带行走机构爬坡越障示意图如图5 所示。 图5(a)表示农机前履带碰到障碍物,开始越障;图5(b)表示农机重心没超过障碍边缘时前履带与障碍物接触时的越障情况;图5(c)表示农机重心超过障碍物边缘,在前、后履带共同作用下越障;图5(d)表示农机完全爬上障碍物,越障完成。

图5 两段式履带行走机构的工作示意图
可以看见两段式履带行走机构能在一定程度上对地形进行仿形,减少了对控制的要求,也有着强于普通越障机构的越障能力。
3 结论
综上所述,本文在分析现有行走机构的优缺点后,设计了一种两段式独立履带行走机构, 这种机构主要是对现有的摇臂式行走机构进行了结构上的改进, 在保证其越障能力的基础上使其可以在遇到障碍物时有一定的自我调节能力,降低了对控制的需求。该行走机构操作容易,结构简单,在有较好的越障能力的同时有着较大的与地面接触面积和较小的转弯半径。
猜你喜欢
煤(2024年3期)2024-03-13 08:34:16
能源工程(2022年2期)2022-05-23 13:51:42
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
港口装卸(2020年3期)2020-06-30 10:37:54
艺术科技(2016年12期)2017-05-04 18:09:55
工程建设与设计(2016年3期)2016-02-27 10:50:41
江苏农业科学(2015年1期)2015-04-17 23:32:16
当代县域经济(2015年12期)2015-03-20 15:51:17
当代县域经济(2015年12期)2015-03-20 15:51:16
当代县域经济(2015年12期)2015-03-20 15:51:16
