LNG接收站港池水深扫测技术
2024-03-06 07:02陈小虎安兴芳
全面腐蚀控制 2024年1期
陈小虎 安兴芳
(1.中海油田服务股份有限公司物探事业部,天津 300451;2.中海华洋(天津)企业管理服务有限公司,天津 300452)
0 引言
LNG即液化天然气,越来越受到青睐。粤东LNG的投产,对粤东工业“洗肺”和区域能源结构优化等方面具有重大意义。为了确保LNG接卸船能够安全驶进码头并顺利靠泊,对锚地、航道、港池内的船舶通航环境要求极高,故对通航区域进行定期的水深扫测很有必要。
1 项目概况
粤东LNG项目位于广东省揭阳市惠来县神泉镇以东约8公里,前詹镇以西约5km的卢园、沟疏村附近沿海,是人工开挖码头。为了保障船舶通航安全,要求对锚地、航道、港池区域进行水深扫测,并与历次扫测数据进行比对,产生的回淤量根据规范要求提出是否需要疏浚的建议,码头示意图如图1所示。
2 测前准备
2.1 平面、高程控制点校核
2.1.1 GPS稳定性试验
定位设备于作业前在已知高等级控制点上进行了连续大于8小时的静态稳定性实验,测定GPS稳定中误差为:Mr=±0.887m。到达现场后,在提供的控制点S2、Q2上架设GPS天线,并通过超级终端系统连续采集2小时的静态观测数据。通过计算得出,GPS稳定中误差为:Mx=±0.200m,My=±0.208m,Mr=±0.3m,结果符合测量规范要求。
2.1.2 高程控制点校核
将提供高等级控制点BM3通过四等水准联测至LNG厂内工作水准点,将所计算结果与提供的工作水准点高程进行比对,二者互差小于10mm,符合测量规范要求[1]。控制点资料如表1所示。

表1 高程控制点资料
2.2 水准联测
在重件码头西南侧设立临时验潮站,将提供高程BM3经过四等水准联测至水尺顶,以确定基面关系。
2.3 检查板刻度标定及检查板水深校核
在现场进行了检查板刻度的标定,并于调查前后,分别在水面平静、流速较小时,用检查板对测深仪进行校准,校核结果符合要求。
2.4 测线布设
侧扫声纳:港池内侧扫声纳计划线平行于LNG码头布设,回旋区及专用航道沿航道方向南北方向布设,专用锚地侧沿南北方向布设,测线间距均为50m。
多波束:港池内多波束计划线平行于LNG码头方向布设,测线间距30m,重件码头北侧由于水深变浅,测线间距更改为15m。回旋区及专用航道沿航道方向南北方向布设,专用锚地沿南北方向布设,测线间距均为30m。
单波束:检查线垂直于各区块多波束主测线方向布设,检查线总长度不小于主测线总长度的5%,符合测量规范要求。
2.5 设备安装
为避开遮挡物,GPS天线安装在多波束支架之上。选择测量船重心附近的两侧船舷位置(约1/2船长处)焊接仪器支架,此位置安装仪器能远离船主机、泵和螺旋桨并有效避免勘察船摇摆及噪音干扰。右舷焊接多波束测深仪的通用支架,于多波束测深仪前方约1m处焊接单波束测深仪支架。侧扫声纳拖鱼安装于左舷,通过支出船舷拖曳(支出船体约1.5m),避开船体对声纳资料干扰。GPS天线与测量仪器换能器安装位置如图2所示。

图2 仪器安装位置示意图
3 外业测量
3.1 潮位观测
为了获得精确的水深数据,在LNG重件码头设立临时验潮站,采用自动验潮仪与人工验潮相结合的方式,将潮位仪放入海面下,通过钢丝缆悬挂在LNG重件码头临时带缆桩(确保低潮时期验潮仪不会干出海面),通过四等水准测量,精确求得提供高程控制点BM3与水尺顶的高差。在水深测量正式作业前半小时开始潮位观测,每10min读取一个水位数据,精确到0.01m,在水深测量结束作业后半小时结束潮位观测。将所测数据整理成电子表格后,与自动验潮仪的潮位数据进行比对,潮位数据准确可靠,潮位曲线平滑连续,比对结果良好,最大误差±0.02m,符合测量规范要求。通过改正计算,将观测到的潮位数据归算到理论最低潮面上。潮位改正基面关系如图3所示。

图3 潮位改正基面关系图
3.2 单波束水深测量
精确量取换能器的吃水深度,并在测深仪中输入换能器吃水值,声速采用标准1500m/s,后处理采用声速剖面对水深数据进行改正。整个测量过程中,根据水深变化实时调整仪器增益,软件对全部水深值进行吃水实时改正。
3.3 地貌测量
正确连接好仪器后,将侧扫声纳拖鱼放入水中,侧扫声纳高频与低频扫宽量程均为70m,航速保持在4节左右,海底声学图像清晰。
3.4 多波束测量
3.4.1 偏移量取
首先以多波束换能器安装杆与海水面交点作为参考原点,建立船体坐标系,定义右舷方向为X轴正方向,船艏方向为Y轴正方向,垂直向上为Z轴正方向,精确量取光纤罗经、GPS、多波束换能器相对于参考原点偏移量,往返各量取一次,求取平均值作为最终结果[2],输入到多波束采集软件中,进行实时偏移修正。如表2所示。
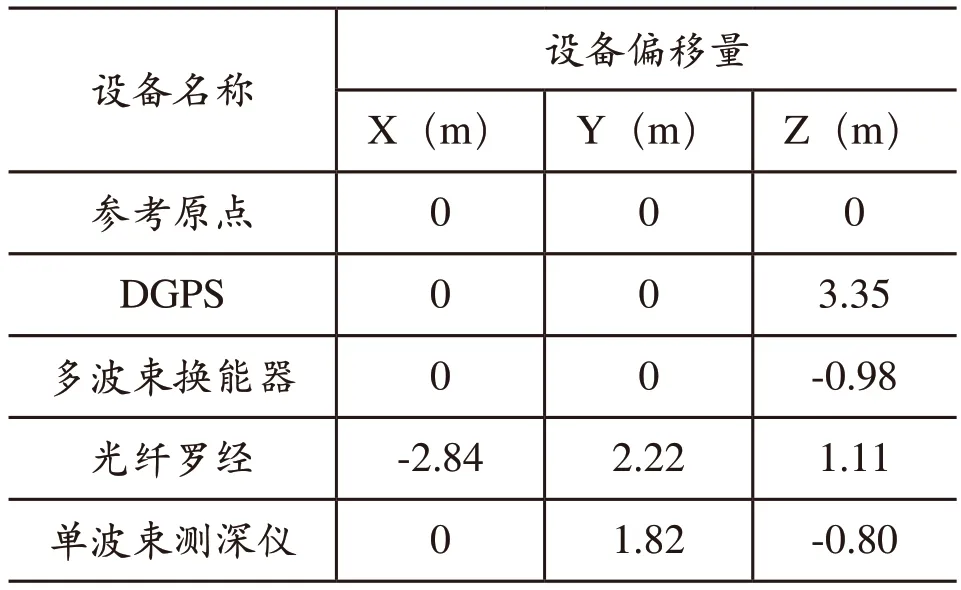
表2 仪器设备偏移量
3.4.2 声速测量
测量期间每天都进行了不少于两次的声速测量。声速测量时声速计均匀达到海底,采用上下复测法,开始时在水面下稳定3min,下放和提升的速度均匀,小于0.5m/s。每天测前取表层声速值输入到Sonic Control 2000声呐控制软件中作为多波束的波束导向,保证PDS 2000采集数据的准确性。每天作业前和作业后均进行声速剖面测量,用于多波束和单波束的数据后处理。
3.4.3 多波束校准
本次多波束安装校准区域选择在测区内港池北侧与自然水域交界处,该区域陡坡坡度明显、周围地形平坦有利于多波束校准测量。通过测区内海底平坦海区沿相反方向以相同速度沿同一测线测得两条带断面测量数据测试系统横摇值(Roll);通过测区内水深变化大的陡坡区域沿相反方向以相同速度沿同一测线测得两条带的中央波束数据测试系统纵摇值(Pitch);通过测区内水深变化大的陡坡区域(间距为覆盖宽度的2/3的两条测线)沿相同方向以同一速度沿相邻测线测得两条带的多波束边缘数据测试系统艏摇值(Yaw)。Sonic 2024多波束系统采用PPS秒脉冲时间同步,Latency为0,不需校准。每次设备安装后均进行了校准,现场采用PatchTest程序计算出各校准值,输入到采集软件中,以保证外业采集资料的实时显示效果。
3.4.4 数据采集
工作期间严格按照技术要求进行作业,对多波束剖面数据及120°多波束开角的有效波束进行实时监控,以确保多波束现场采集的数据质量和有效覆盖宽度。测量期间,换能器静吃水未发生变化。测量船作业时船速控制在5节左右,不大于6节,保证测量数据质量良好。测量船的横向和纵向摇摆角度小于8°,多波束的发射频率为300kHz,接收增益为10db,量程根据测区的实际水深进行调整,以保证多波束取得最优的测量数据。
4 数据处理
4.1 潮位数据处理
把重件码头临时验潮站采集的潮位数据改正到理论最低潮面上,并编辑成后处理软件所需的数据格式,供单波束及多波束数据处理。
4.2 导航数据处理
先将导航数据资料对照计划线进行全面的检查,剔除卫星状态不好时的定位粗差。根据每个仪器不同的位置偏移量,生成相应的航迹图。
4.3 单波束数据处理
先将记录中测得的深度值对照模拟记录纸进行检查,排序去掉错误、多余和重复的数值后,通过潮位数据、声速数据改正,输出为AutoCAD DXF文件。
4.4 多波束数据处理
数据处理流程包括声速折射修正、剔除错误“飞点”、潮汐改正、声速改正、海底曲面生成、数据合并、抽稀、输出和绘图等过程。其中声速折射改正是对由于声速误差造成的海底弯曲变形进行的修正,即修正“哭脸”、“笑脸”的过程。剔除“飞点”是人工去除错误“跳点”的过程。处理流程如图4所示。
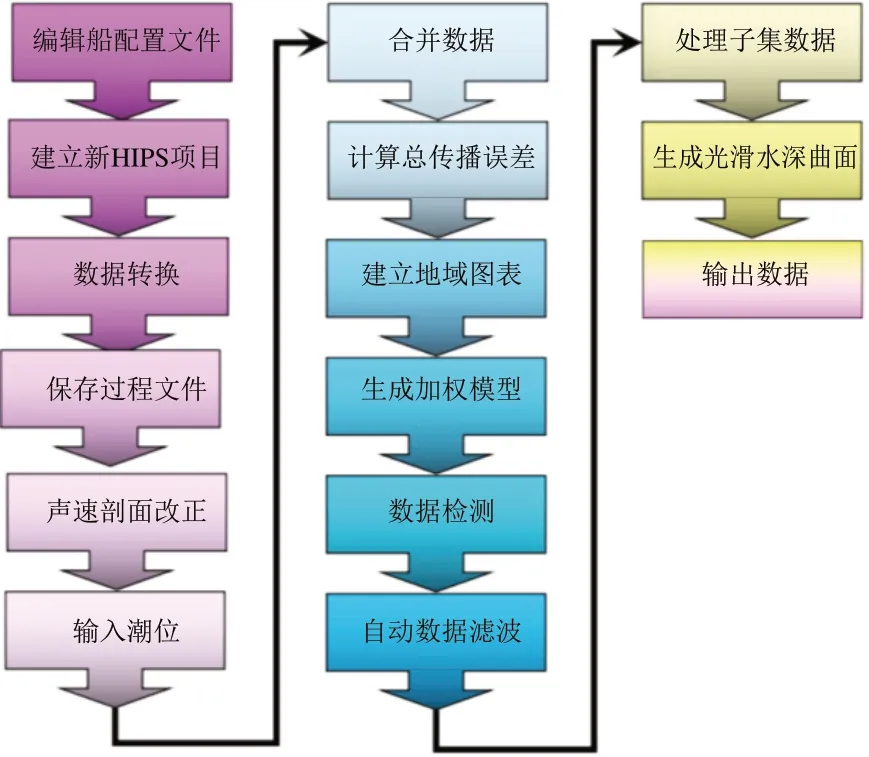
图4 多波束处理流程图
4.5 主检比对
把多波束数据和单波束数据分层导入到自主研发的《海测助手V4.1》软件中,进行主、检测线水深符合性比对(检查半径为2.0m),检查线水深共有1885个,有效检查水深291个,超限点个数为0,比对符合测量规范要求[3]。比对要求如表3所示。

表3 主、检测线水深符合性比对表
5 调查结果
5.1 地貌情况
专用锚地水域未见明显强反射异常,未探测到疑似障碍物。专用航道整体海底地形较平整,共发现16处可疑障碍物;其中港池部分发现10处、航道区域发现6处,其声学图谱表现为反射强烈、阴影明显。码头前沿及港池北侧水深骤浅区域,声纳影像反射强。声学影像如图5所示。
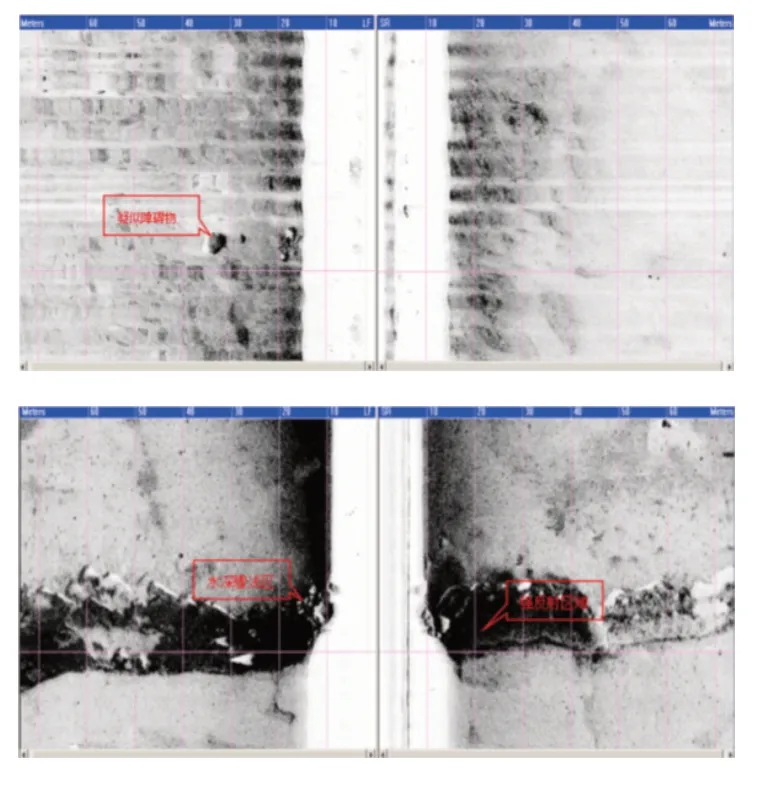
图5 专用航道和港池侧扫声纳声学图谱
5.2 地形情况
专用锚地水域海底整体地形平整,水深由西北向东南逐渐变深,扫测范围内未发现明显障碍物。接收站水域扫测结果显示,测区内内存在多处离散的孤立浅点。浅点影像如图6所示。

图6 LNG码头前沿浅点影像
5.3 可疑浅点潜水探摸
根据可疑浅点坐标,定位工程师指挥作业船移动到可疑浅点附近,作业船抛锚就位,移动船位将左舷中部(潜水员要下水的位置)对齐可疑浅点。船舶完成就位后,关闭船舶发动机,锁定推进器。作业人员在可疑浅点垂直上方的位置抛入水砣后,潜水员沿入水绳入水到达可疑浅点位置;潜水员对可疑浅点进行探摸、测量,确认浅点的性质、材质、形态、尺寸等。探摸结果显示,可疑浅点范围内的可疑物均为礁石。
6 结论及建议
(1)建议对测区内离散的孤立浅点,根据浅点所处位置、深度及分布形态确定施工处理方案;
(2)建议对测区内不满足水深要求的区域制定相应的施工处理方案;
(3)建议定期对船舶通航区域进行水深扫侧,掌握回淤规律和状态;
(4)建议根据水深扫测报告及设定的验收标高,及时对回淤泥沙及块石进行疏浚。
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
海洋通报(2021年3期)2021-08-14
河北地质(2021年1期)2021-07-21
水道港口(2020年3期)2020-07-28
水利水电快报(2019年2期)2019-03-08
水道港口(2018年5期)2018-12-04
水利规划与设计(2017年6期)2017-07-18
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
航空学报(2015年4期)2015-05-07
航空学报(2015年4期)2015-05-07