
二阶离散Holling-Ⅳ型差分系统稳定性分析
2022-01-15 01:32柏思宇曹名圆
北华大学学报(自然科学版) 2021年6期
李 峥,柏思宇,王 悦,曹名圆
(北华大学数学与统计学院,吉林 吉林 132013)
在捕食者-食饵系统中,功能反应函数起着重要作用[1],其中Holling-Ⅰ~Ⅲ型功能反应函数在第一象限单调非减,而Holling-Ⅳ型功能反应函数[2]用来描述当食饵密度达到较高水平时,捕食者生长可能受到抑制的非单调反应.随着生物系统的不断发展,学者们利用离散变量对Holling-Ⅳ型差分系统的性质进行了研究[3-8].
如Cinar[3]研究了如下差分系统的正解
Clark和Kulenovi[4,5]研究了如下差分系统的性质
基于离散动力系统的初步研究,本文研究Holling-Ⅳ型差分系统
(1)
正解的渐近性,其中参数α1、β1、γ1、α2、β2、γ2及初始条件u-1、u0、v-1、v0均为正数.本文考虑un和vn的两种不同取法,即un=xn,vn=yn与un=yn,vn=xn.针对这两个差分系统,分别研究它们的平衡点及其稳定性.
1 稳定性分析
首先考虑取un=xn,vn=yn时,系统(1)的稳定性,即
(2)
为了构造系统(2)对应的线性化形式,作如下变换
(xn,xn-1,yn,yn-1)→(f,f1,g,g1)
(3)
(4)

其特征多项式

(5)
定理2如果α1<β1,α2<β2,则系统(2)的平衡点(0,0)局部渐近稳定.
证明:由式(4)易知,系统(2)在点(0,0)处的雅可比矩阵为
其特征多项式
定理3系统(2)的平衡点(0,0)全局渐近稳定.
证明:在定理2结论的基础上,如果平衡点(0,0)是全局吸引子,那么(0,0)是全局渐近稳定的.因此,我们只需证明(0,0)是全局吸引子.

现在考虑第2种取法系统(1)的稳定性,即取un=yn,vn=xn,则有
(6)
与第1种证法类似,作如下变换
(xn,xn-1,yn,yn-1)→(f,f1,g,g1)
(7)
这里f=xn+1,f1=xn,g=yn+1,g1=yn.系统(6)有唯一的平衡点(0,0).基于变换(7),在点(0,0)处的雅可比矩阵为
(8)
定理4如果α3<β3,α4<β4,则系统(6)的唯一平衡点(0,0)全局渐近稳定.

然后证明(0,0)是一个全局吸引子.因为对系统(6)有

2 数值算例
为了验证我们的结果,本节考虑简单的数值模拟.
例1选取系统(2)初始条件x-1=0.8,x0=3.5,y-1=1.7,y0=1.1,参数α1=118,β1=125,γ1=10,α2=135,β2=140,γ2=12,则系统(2)变为
此时,该系统的仿真结果见图1.
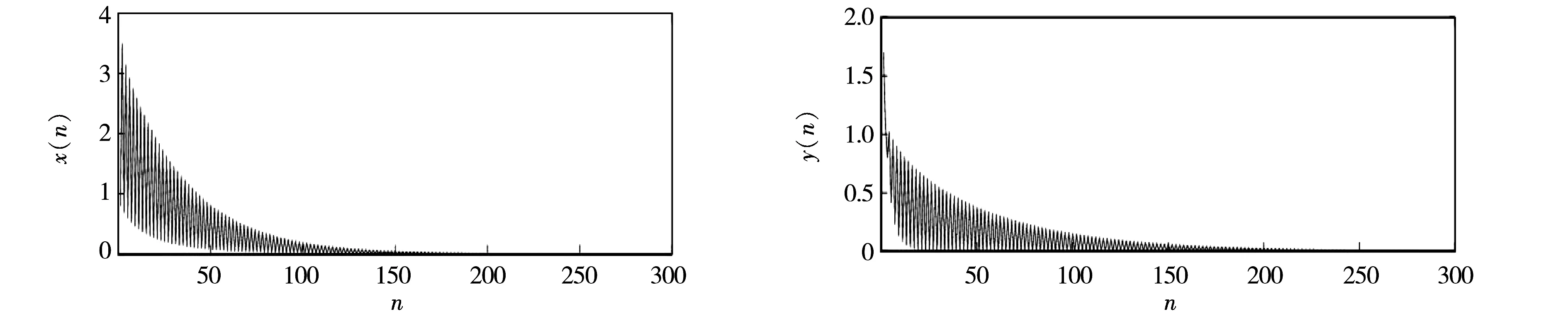
图1 参数α1=118,β1=125,γ1=10,α2=135,β2=140,γ2=12时,系统(2)中xn,yn的时序Fig.1 Plot of solutions xn,ynto Eq.(2) with parameters α1=118,β1=125,γ1=10,α2=135,β2=140,γ2=12
例2选取系统(6)初始条件x1=0.7,x0=1.8,y1=2,y0=1.1,参数α3=150,β3=151,γ3=2.3,α4=165,β4=175,γ4=8,则系统(6)变为
此时,该系统的仿真结果见图2.
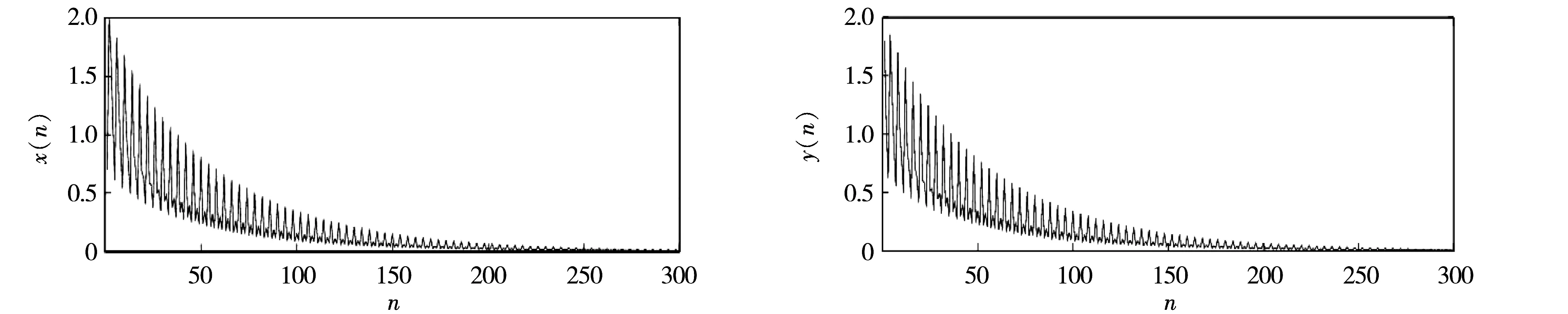
图2 参数α3=150,β3=151,γ3=2.3,α4=165,β4=175,γ4=8时,系统(7)中xn,yn的时序Fig.2 Plot of solutions xn,yn to Eq.(7) with parameters α3=150,β3=151,γ3=2.3,α4=165,β4=175,γ4=8
由图1和图2可见:在两组参数条件下,系统(2)和(6)的解都趋向于平衡点(0,0).这说明系统(2)和(6)的参数只要分别满足条件α1<β1,α2<β2和α3<β3,α4<β4,则平衡点(0,0)均全局渐近稳定.
猜你喜欢
中北大学学报(自然科学版)(2022年4期)2022-09-23
吉首大学学报(自然科学版)(2022年1期)2022-08-11
吉首大学学报(自然科学版)(2022年1期)2022-08-10
上海师范大学学报·自然科学版(2022年3期)2022-07-11
百科探秘·海底世界(2020年11期)2020-12-31
初中生学习指导·提升版(2020年12期)2020-09-10
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
教育教学论坛(2019年27期)2019-07-30
上海师范大学学报·自然科学版(2018年3期)2018-05-14
计算机应用(2016年10期)2017-05-12
