
五自由度搬运机器人工程综合实训平台
2020-07-20 05:07孟振华
科教导刊 2020年17期
孟振华
(烟台大学工程实训中心 山东·烟台 264005)
机器人对提升我国制造业的全球竞争力发挥着至关重要的作用。机器人在制造领域的普及必然要求高校培养大量具有复合知识结构和创新能力的工程技术人才。[1]包括烟台大学在内的众多高校也已陆续开设机器人专业和相应的专业技术课程。工程训练教学作为工程技术人才培养的关键环节,更应加速推进教育改革创新,以服务新工科的建设与发展的迫切需求为己任,紧跟现代制造业发展趋势,积极响应人才市场需求,建设以工程综合创新能力培养为目标的机器人综合创新实训平台。
作为工程训练教学体系的第三层次,[2]工程综合创新训练更加注重不同学科理论知识的交叉融合和各种工程技术能力的综合应用。因此,在工程综合创新实训活动中,学生才是居于中心位置的主体,而教师在实训项目实施过程中更多起到的是方向引导的作用。综合、开放、友好的新型实训平台是工程综合创新实训开展的关键。传统的工业机器人由于设备成本较高,控制系统开放程度低,操作危险性等因素,需要较高的专业操作技能要求,难以应用于“以学生为主体”的工程综合创新实训。烟台大学工程实训中心利用实验室开放项目,搭建了基于Arduino控制的五自由度搬运机器人实训平台,并在此基础上开展了工程综合创新实训。
1 实训平台设计
1.1 总体设计
面向工程综合创新能力培养的搬运机器人实训以培养学生自主进行机器人相关项目的设计、应用能力为目的。因此,实训平台的设计应当考虑以下几点:(1)机械构应有普遍性、代表性,与常见六自由度工业机器人具有较高相似性;(2)控制器开放程度高,对学生友好,易于入门上手;(3)成本低,易于推广,便于维护。
基于以上设计思想,模拟工业机器人上下料搬运应用场景,设计五自由度关节型搬运机器人实训平台。实训平台由机械本体、驱动装置、控制器三部分组成。
关节型搬运机器人机械本体结构如图1所示,整个机械手共有5个回转关节,1个末端执行器(手抓)。其中:第1关节(J1)轴线与水平面垂直,第 2、第3、第 4关节(J2、J3、J4)轴线与水平面平行,与第1关节(J1)轴线垂直,第5关节(J5)轴线与第 4 关节(J4)轴线相垂直。本实训平台机械手的 J1、J2、J3、J4、J5关节的作用分别对应6自由度关节型工业机器人的J1、J2、J3、J5、J6 关节。J1、J2、J3 关节用来确定机械手的空间位置,J4、J5关节用来控制末端执行器(手抓)的空间姿态。为了保证大负载状态下机械手臂的稳定性,设计J2相对于J1有一个负向偏置。
5台扭力15kg、转动范围0-270°标准舵机,控制控制5个关节的回转运动;1台扭力15kg、转动范围0-180°的耐烧舵机,控制末端执行器(手抓)的开合运动。
控制器是以ArduinoATMega328为核心,集成舵机驱动模块的小型控制板。该控制器具有以下显著优点:(1)体积小、易于摆放,同时接口资源丰富,利于实训项目延伸扩展;(2)Ardu-ino IDE平台开发语言简单清晰,适合学生快速入门上手;(3)Arduino IDE平台开发环境支持Windows、MacOS、Linux等系统,可在大多数计算机操作系统运行;(4)共享资源丰富,适合学生自主研究学习。[3]

图1 关节型搬运机器人机械结构示意图
1.2 运动学分析
根据标准D-H法,以底面某一点为世界坐标系(基座坐标系)∑0,∑1-∑5坐标系分别与J1-J5关节固连,坐标系Z轴与关节轴线重合。根据各关节之间几何关系以及标准D-H参数定义法则确定机器人各关节坐标系位姿变换关系如图2所示,五自由度搬运机器人标准D-H运动学模型参数如表1所示。
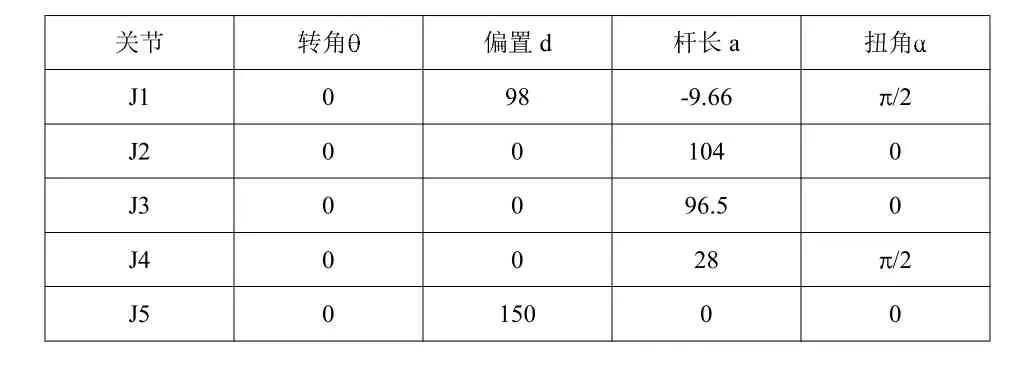
表1 搬运机器人标准D-H运动学模型参数
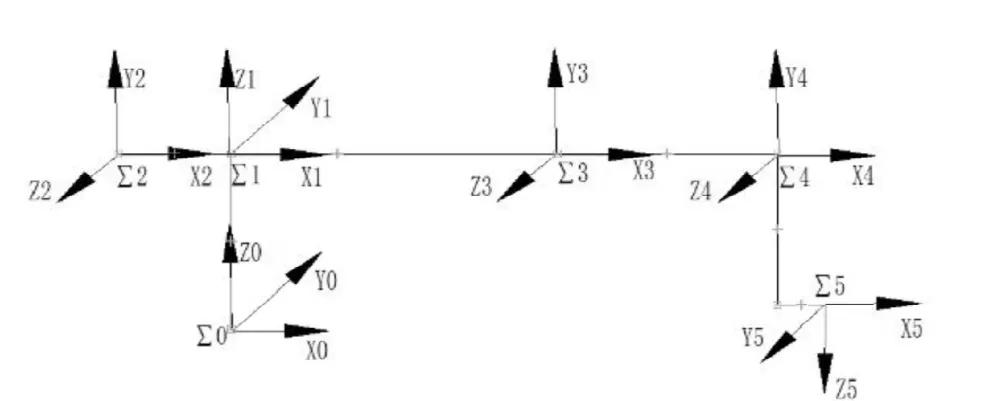
图2 机器人各关节坐标系位姿变换关系
根据标准D-H法关节坐标变换规律,即:(1)绕Xi-1轴转i-1角度;(2)沿Xi-1轴移动ai-1距离;(3)绕Zi轴转 i角度;(4)沿Zi-1轴移动di距离。[4]
借助Matlab Robotics Toolbox建立五自由度机械手运动学仿真初始状态模型如图3(a)所示。考虑到机械手待机状态下舵机负载尽可能小的原则,将机械手零位状态定义为:J1、J3、J5 关节偏移量为 0,J2、J4关节偏移量为 /2,如图3(b)所示。

图3 Matlab Robotics Toolbox运动学建模
2 实训项目设计
实训项目设计为模拟工业机器人进行货物搬运,具体要求为:编程使用机械手将存放区域A的正方体物料从A点依次码放到目标区域B,如图4所示。

图4 机械手与存放区域、目标区域关系
项目要求学生根据机械手性能和被搬运物体几何尺寸确定存放区域中心点到机械手基座坐标系中心点的距离,机械手机械坐标系原点到目标区域中心点距离;控制机械手完成搬运作业。实训项目实施分为三个阶段:关节变量计算,控制程序编写,运行调试。
2.1 关节变量计
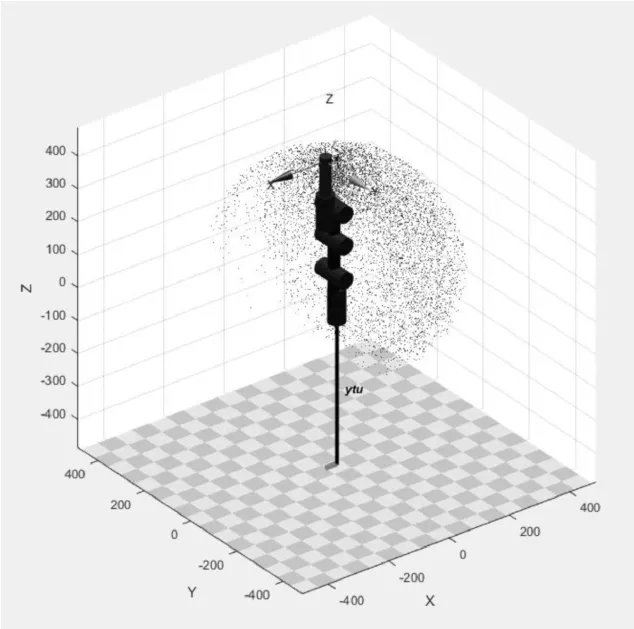
图5 机械手工作空间示意图


表2 抓取过程各控制变量参数表
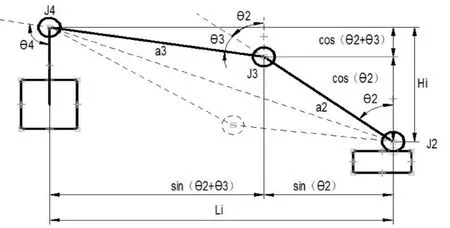
图6 机械手逆运动学解析图
2.2 控制程序编写
通过查阅开源资料,将解析计算的结果转化为控制程序。本实训平台所使用舵机的基准信号是周期20ms,占空比有效范围0.5-2.5ms。1.5ms基准信号定义为中位信号,当脉宽给1.5ms时对270°舵机来说就是控制其处于135°的位置。为了简化控制复杂程度,本实训平台主控板支持多个舵机控制指令,编写控制程序主要使用以下三种指令:
舵机运动指令,格式为:#IndexPpwmTtime!其中,Index为3位,代表从000号开始要控制的舵机编号;pwm为4位,代表舵机高电平脉宽从500-2500 s,500代表舵机起始位置,即0°位置,2500代表最大行程位置;time为4位,代表从上一位置运行到当前位置所用时间,取值范围从0000-9999,单位ms。
停止指令:$DST!,舵机在运行过程中,接收到此指令将会停止所有舵机的运行,停在当前位置。
复位指令:$DJR!,执行该指令,舵机0号到5号舵机全部复位到1500的初始位置。
2.3 运行调试
运行调试环节主要是验证控制程序的正确性和合理性。本实训平台手抓为舵机控制,需要确定手抓开合度的理想设置,开合度偏大将导致手抓抓取不稳,被抓取物体掉落,开合度偏小将导致舵机负载过大,烧毁舵机。通过调试修正1~5关节参数以及手抓开合度参数。以一个物体的抓取过程为例,通过逆运动学求解可得控制变量参数如表2所示,运行抓取程序如图7所示。

图7 搬运过程示意图
3 总结
五自由度搬运机器人工程综合实训以机器人运动学为理论支撑,通过搬运场景设计、搬运动作设计、运动参数计算、控制程序编写以及调试优化运动参数等一系列环节,模拟了关节机器人进行搬运、码垛的工业应用场景。在此过程中,学生作为实训教学活动的主体,发挥自身主观能动性,运用所学理论知识,通过在实训平台上进行大量实践自主完成项目,在实训过程中收获工程综合创新能力。
五自由度搬运机器人综合创新实训项目实施一年来取得了良好的教学效果。学生通过实训实现了从被动学习到主动研究的模式转变。此外通过实训对关节机器人控制有了进一步的了解,为日后参加各类学科竞赛积累了实践经验,打下良好基础。
猜你喜欢
中国设备工程(2022年15期)2022-08-19
机电工程技术(2021年3期)2021-09-10
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
环球时报(2019-07-18)2019-07-18
电子制作(2018年1期)2018-04-04
航空模型(2016年5期)2016-07-25
冰雪运动(2016年5期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11
航空模型(2015年6期)2015-10-21
