基于陆态网络的远距离在航潮位提取方法研究
2018-09-14 05:55:44肖根如程朋根王胜平吴远昆
东华理工大学学报(自然科学版) 2018年4期
肖根如,程朋根,王胜平, 吴远昆,许 敏
(1.江西省数字国土重点实验室(东华理工大学),江西 南昌 330013,2.东华理工大学 测绘工程学院,江西 南昌 330013)
中国大陆构造环境监测网络(简称陆态网络)是国家发展与改革委员会在“十一五”期间立项支持的国家重大科技基础设施建设项目,是“九五”国家重大科学工程“中国地壳运动观测网络”的二期项目(甘卫军等,2012)。陆态网络包括基准网(260个连续站,框架网)、区域网(2000个流动站,加密网)和数据系统三个重要部分(勾威等,2012)。为及时和重点监测地震、泥石流等突发灾害事件,同时配备8套可移动GNSS基准站;区域网以定期与不定期相结合的方式进行观测。通常情况下每两年进行一次复测,每期每站至少连续观测72 h,从2013年开始,区域网站每年复测一次,由此可获得站点的高精度三维坐标。
远距离在航潮位测量采用GPS动态后处理技术,通过基准站已知坐标对流动站进行差分相对定位(Mann.,2007;欧阳永忠等,2005;包荣萍等,2016;臧克家,2016)。陆态网络基准站都建设为基岩或深土层标墩,站基稳定,不易受到外界环境的影响,并能够提供采样率为30 s和1 s的连续观测数据。同时陆态网络区域站在东部沿海地区分布密度大,覆盖整个近海岸地区(图1)。这些区域站都建设有满足地壳运动监测功能的观测墩,并且已有精确的站点位置坐标,即便将站点安置于这些区域站墩,也能获得非常好的稳定性。基于陆态网络上述优点, 将其应用于远距离在航潮位提取中,能极大地减弱岸基参考观测站的不稳定性,在保证瞬时水面高程精度的同时又提高工作效率。

图1 陆态网络东部沿海GNSS基准站点Fig.1 GNSS stations at eastern coastal area of COMONOC(II)
1 基于陆态网络在航潮位提取方法
1.1 TRACK动态数据处理
TRACK是GAMIT/GLOBK软件的一个动态定位模块(King et al.,2003;李军等,2010),以载波相位观测值作为输入,通过相位差分进行动态相对定位,其定位结果可获取测站相对参考站的逐历元三维坐标差及单位权中误差,进而获得移动站的运动位置和速率 (苏小宁等,2009)。
TRACK 模块数据处理如图2所示,利用陆态网络基准站RINEX数据的伪距观测量得到初始值,同时从IGS获取星历、轨道数据等,在相对秩原则的基础上,利用卡方增量比较L1和L2模糊度整数值的最佳选择与次最佳值,若最佳选择的卡方影响更小,则模糊度便可固定为整数值,然后采用迭代法解算出更多历元的模糊度,最后利用卡尔曼滤波修正未解决的模糊度参数和对流层延迟参数,处理完成后输出三维坐标。
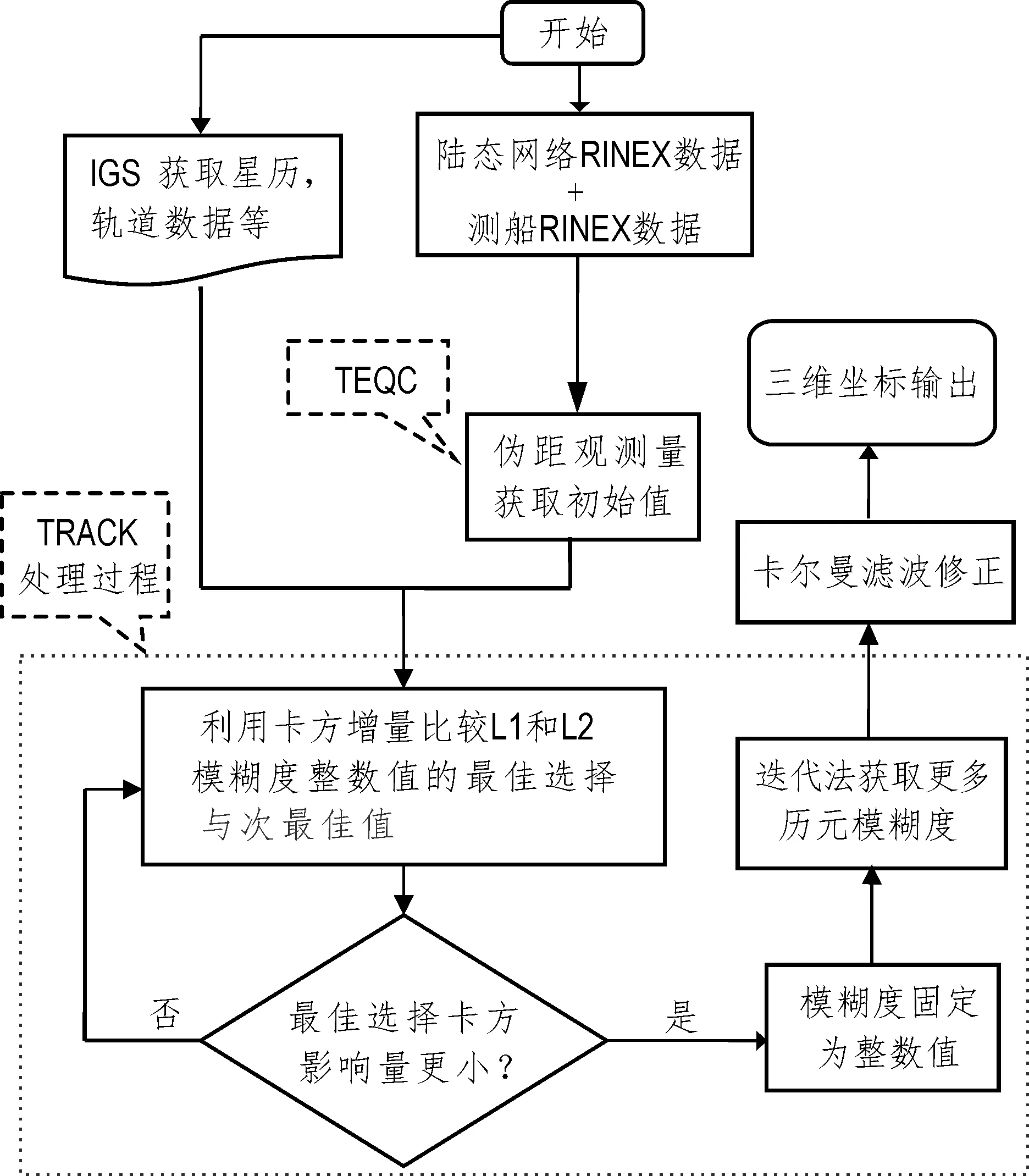
图2 TRACK模块数据处理流程图Fig.2 Data process flowchart of TRACK
1.2 船载流动站精密坐标获取
船载流动站坐标精密解算主要步骤是(赵建虎等,2008;赵建虎,2012):首先利用GAMIT等高精度GPS数据处理软件解算“陆态网络”基准站观测数据,获取基准站高精度的坐标及模型改正参数;然后结合流动站观测数据,通过GAMIT软件TRACK模块对流动站进行差分定位,获取流动站高精度三维坐标(图3)。

图3 流动站坐标精密解算流程图Fig.3 Data process flowchart of regional stations
1.3 在航潮位数据处理
在航潮位数据处理主要通过高程质量控制、船体姿态改正、船体动态吃水改正、垂直基准转换、潮位提取等来获取最终潮位。
(1)高程质量控制。实际观测过程中由于卫星失锁等原因,造成GPS高程信号出现部分异常值,为保证潮位结果精度,本文采用Kalman滤波和Heave修正综合滤波技术来对异常信号进行修正。
(2)船体姿态改正。在风浪等因素影响下,船体会发生横摇、纵摇以及垂直方向上下起伏变化,使得船体不能按照理想姿态行进。为获得瞬时水面高程,必须对船体姿态进行改正来补偿船体姿态变化给潮位测量带来的影响。本文考虑到多传感器数据传输延迟情况,在船体姿态改正前先进行了多传感器时间同步操作。
(3)船体动态吃水改正。船体动态吃水对潮位测量也有比较大的影响,本文根据船底压力传感器获取的实时船体动态吃水数据,来补偿船体动态吃水对瞬时海面高程的影响。
(4)垂直基准转换。GPS测量的高程是基于WGS-84椭球面的大地高,而潮位多用基于理论深度基准面的海图高表示,因此需要把大地高转换为海图高。具体的转换方法分为两步:第一步,将高程基准由大地高转换为正常高;第二步,把正常高转换为海图高。
(5)潮位提取。直接测量的瞬时海面高程信息反映的是实际海水面的起伏变化,不仅包含反映潮汐的长周期项,还包含反映波浪的短周期项。如果要获取潮位信息,就必须从瞬时海面高程中提取长周期信号,即在航潮位。本文采用基于快速傅里叶变换(FFT)的低通滤波器来提取潮位(图4)。

图4 在航潮位数据处理流程图Fig.4 Data process flowchart of OTF Tide
2 实验结果及可靠性分析
为论证本文所述理论的准确性与可靠性,在珠海近海岸海域进行了实验,试验中选取陆态网络连续站GDZH(广东珠海,TRIMBLE NETR8 GNSS接收机)所提供的连续观测数据,采用PPK方式解算流动站坐标。RTK模式采用人为架设稳定的三脚架基准站,安装天宝接收机(TRIMBLE SPS852)。流动站天线固定在测船上方环视良好且易于观测的位置,同时可以避免多路径效应,接收机为两台TRIMBLE SPS882天宝接收机,采样率1 s,分别用于RTK和PPK潮位观测。观测采集期间,手簿通过蓝牙接入用于PPK观测的接收机,确保手簿屏幕显示始终处于“PPK固定”状态。TSS姿态传感器安置在测船重心位置,压力传感器安置在测船底部,采样率皆设为5 Hz。实验期间的姿态和压力数据通过自主研发的数据采集软件采集和存储(秦海波,2015)。
基站架设在深圳湾航道站附近的控制点,测量开始前首先将测船锚定,在岸边架设高精度全站仪,采用棱镜模式测定姿态传感器、GPS接收机的位置,经过处理转换获得在船体坐标系下测船初始各仪器的姿态坐标(桂新等,2015)。

表1 船体坐标系下的各类传感器坐标
实验坐标系投影采用高斯三度带投影,中央子午线设置为114°。通过由已知水准点进行水准测量引测至临时验潮站,辅助以必要的采集人工验潮数据。
潮位数据比较分析主要通过PPK与RTK数据比对以及PPK验潮观测数据(经姿态修正)与人工验潮两种潮位数据比较,验证本文所述方法的可靠性和分析GNSS验潮观测精度。
通过实验数据进行PPK及RTK瞬时高程数据进行了比较,并绘制了二者的误差分布图(图5,图6)。
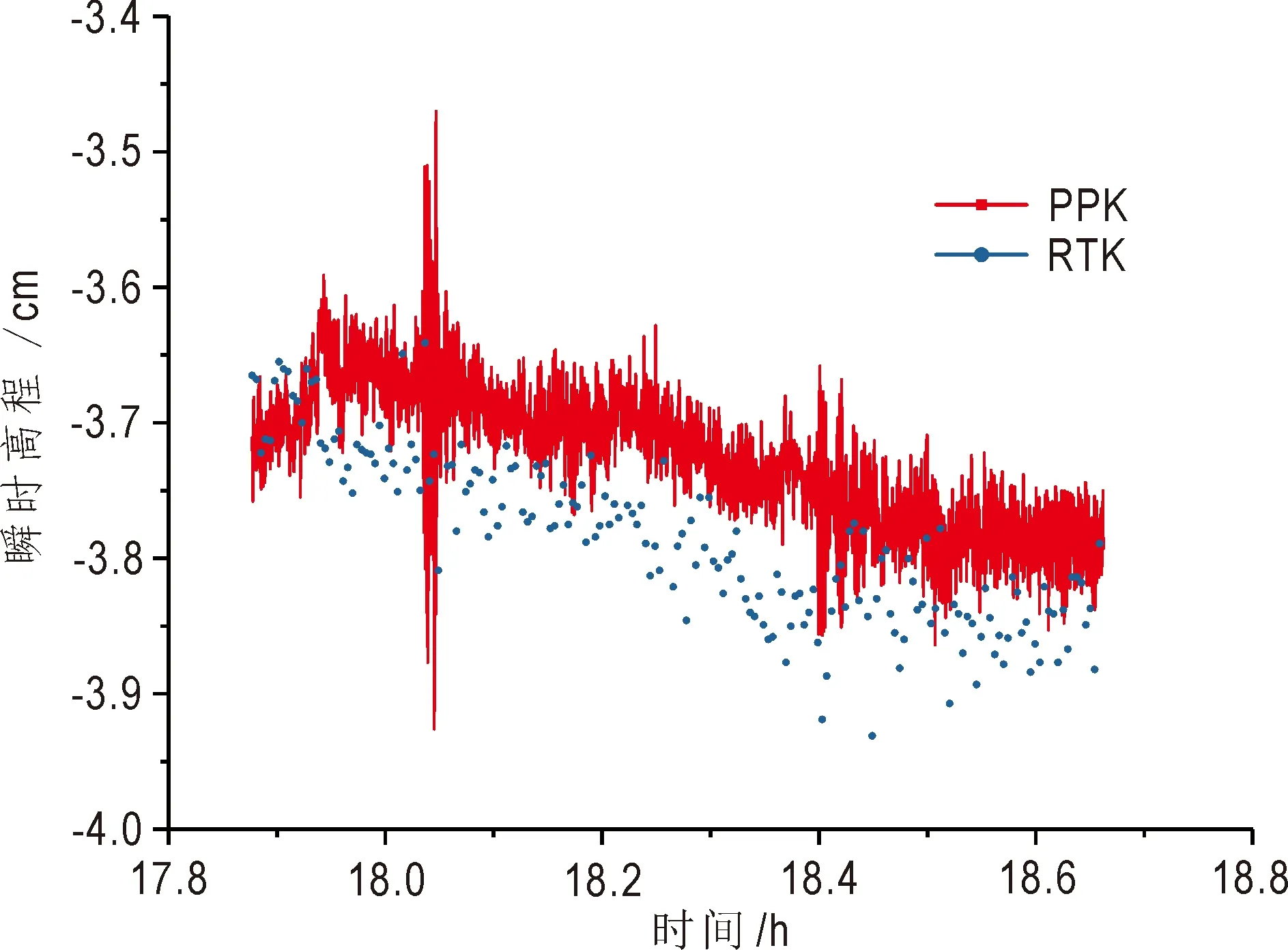
图5 PPK与RTK的瞬时高程比较图Fig.5 Instant heights between PPK and RTK
由图5和图6可得,通过GPSRTK与PPK方式,都可以获得测船的精确高程数据,且两种方式得到的高程数据保持了较好的一致性,图中数据最大的偏差为14.0 cm,最小的偏差0.1 cm。进一步说明将PPK引入潮位测量具有与RTK方法接近的准确性及可行性。
由实验数据得到的PPK潮位与人工验潮获得的潮位进行比较分析,并绘制了二者的误差分布图(图7,图8)。

图6 PPK与RTK的瞬时高程数据比较误差分布图Fig.6 Instant heights error between PPK and RTK
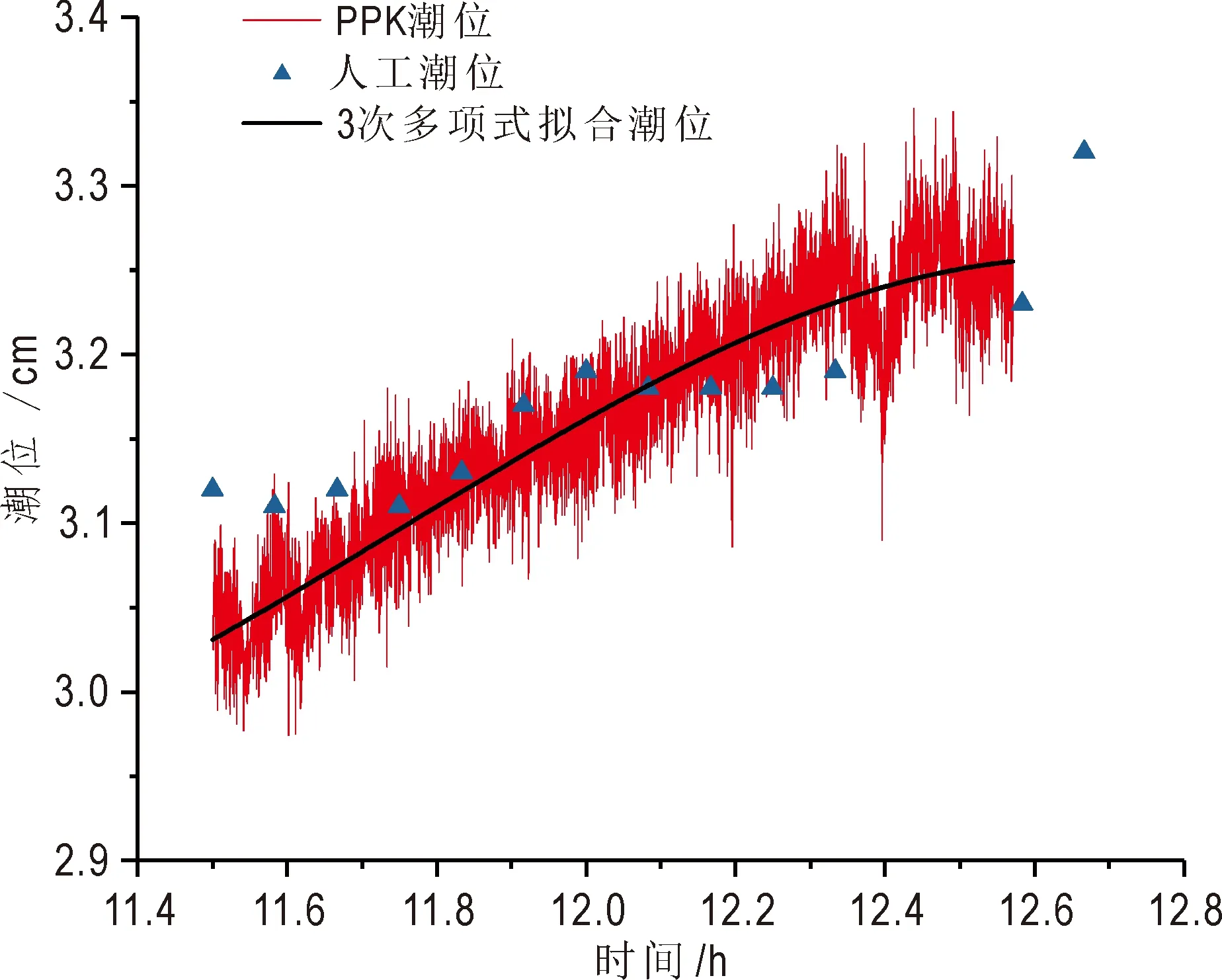
图7 PPK潮位与人工潮位的比较图Fig.7 Tide between PPK and Manual Tide
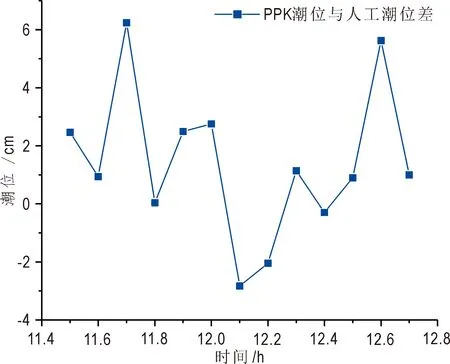
图8 GNSS PPK潮位与人工潮位的比较误差分布图Fig.8 Tide error between PPK and Manual Tide
分析图7和图8可得,若以潮位站潮位为参考(真值),则GNSS PPK潮位的最大偏差为6.24 cm,最小为0.04 cm,RMS(均方根误差)为1.94 cm。以上结果表明, GNSS PPK潮位和验潮站潮位具有很好的一致性。
3 结论
基于陆态网络获取的瞬时水面高程与RTK获得的瞬时水面高程一致。本文采用的PPK潮位提取方法获得的潮位结果与潮位模型内插潮位保持了很好的一致性。在环境复杂地区测量中,本文采用的计算模型也可以得到很好的潮位信息,从而证明了该方法的正确性。另外,陆态网络基准站相比较人工架站(三脚架)更稳固,不易受天气环境的影响;陆态网络基准站覆盖了我国东南沿海大部分海域,更利于展开潮位测量工作。
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
舰船科学技术(2022年20期)2022-11-28 08:19:52
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07 12:57:26
河北地质(2021年1期)2021-07-21 08:16:12
水利水电快报(2019年2期)2019-03-08 09:56:22
水利规划与设计(2017年6期)2017-07-18 10:56:27
焊接(2015年9期)2015-07-18 11:03:51
黑龙江工程学院学报(2015年2期)2015-04-19 00:43:13
海军医学杂志(2015年2期)2015-02-27 13:47:42