
Ф2 020 mm口径空间红外相机主反射镜设计
2018-08-28 08:47浦前帅
发光学报 2018年8期
翟 岩,梅 贵,江 帆,浦前帅
(1.长春理工大学,吉林长春 130022;2.中国科学院长春光学精密机械与物理研究所,吉林长春 130033)
1 引 言
随着空间对地观测技术的快速发展,对空间相机的分辨率提出了越来越高的要求,增大光学系统的焦距和通光口径是提高地面像元分辨率的有效途径[1-2]。即红外光学观测的高分辨率需求,就是对大口径红外光学系统的需求[3-4]。
一般认为口径大于Ф500 mm的反射镜即为大口径反射镜,近年来西方国家发射的空间红外相机的口径一般为Ф500~850 mm,均属于大口径反射镜,但是为获得更高分辨率的红外图像,需要有针对性地对具有更大口径的红外光学系统的反射镜进行设计。
本文针对某空间红外相机Ф2 020 mm口径主反射镜进行结构设计研究,以有限元仿真分析作为分析手段,通过多次迭代,设计出性能满足指标要求的主反射镜组件结构。有限元分析结果表明,Ф2 020 mm口径反射镜在三向重力和±5℃温度共同作用下,全口径范围内面形变化量RMS值优于λ/20(λ=632.8 nm),反射镜组件一阶谐振频率优于90 Hz,主反射镜组件(模型)总重237.13 kg。
2 主要设计指标
反射镜设计的技术指标主要包括:反射镜的通光口径、镜面面形要求、组件所处的环境温度等几个方面。
本文设计的反射镜口径为Ф2 020 mm,要求镜面全口径面形误差RMS值不低于λ/20(λ=632.8 nm),组件所处的环境温度水平为(20±5)℃。
3 反射镜设计
3.1 支撑方式的确定
空间相机需要承受的力场变化和温度场变化是空间光学遥感器设计中必须解决的问题[5]。为了确保空间相机的耐用可靠,相机的各部件必须具有良好的结构刚度和强度,并具备较好的热稳定性,使相机能够在力场变化中保持相对稳定的空间位置,保证相机在温度场变化时,反射镜组件发生受热变形后的面形满足光学设计的要求[6-7]。
对于空间遥感相机的主反射镜来说,直径为Ф2 020 mm的镜面尺寸属于超大口径,在国内基本属于最大的。为保证反射镜全口径面形RMS值优于λ/20(λ=632.8 nm),选择背部多点支撑方式。
3.2 材料选择
根据现阶段反射镜设计、成型、加工、装配的技术成熟程度,反射镜材料性能应满足比刚度大,导热率高同时材料本身具有优良的稳定性,并与反射镜支撑结构材料线膨胀系数具有很好的匹配性能[8]。
综合考虑光学元件的机械性能、质量、对工作环境的适应性、线膨胀系数、加工工艺性、采购渠道、经济合理性等因素[9-10],本文中反射镜镜体材料选用碳化硅材料,柔性支撑材料选用铁镍合金(4J32)。材料的属性如表1所示。

表1 组件材料属性Tab.1 Performance parameters of materials
3.3 反射镜的轻量化
根据反射镜镜体成型工艺,参考其他多块大口径反射镜的轻量化形式和采用不同形式轻量化孔的设计结果,反射镜选择背部开口的轻量化形式,轻量化结构采用三角形轻量化孔。


根据经验公式并根据实际情况对以上两公式优化,可以计算得到反射镜的径厚比和支撑点数量[10]。由此设计反射镜的结构形式如图1所示。
主反射镜设计尺寸 Ф2 020 mm,厚度200 mm,径厚比为10.1∶1,轻量化后质量228 kg,轻量化率为88.34%。反射镜采用背部3点支撑方式,3个支撑点的圆心距离反射镜轴线距离为600 mm。采用背部双拱的轻量化形式,背部筋厚6 mm,等间距排布,筋间隔为150 mm,三角形轻量化孔内接圆直径Ф94 mm。
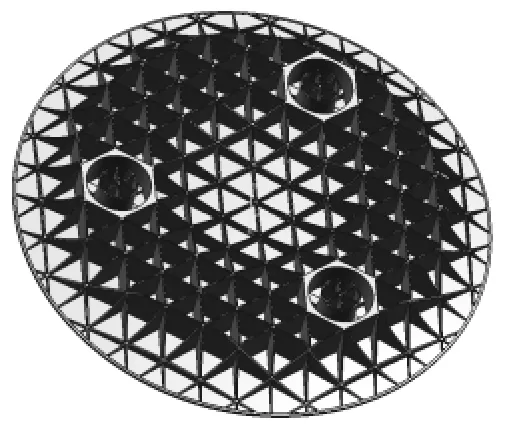
图1 主反射镜轻量化结构Fig.1 Lightweight of main mirror
为保持筋的连贯性,3个支撑点周边壁厚随位置的不同加厚的程度不同。在柔性支撑件不碰触的高度,沿筋的方向增加了矮筋,矮筋高度随镜面的凹陷深度不同而不同,为18~32 mm。由于矮筋的高度受限,在筋厚度相同时,矮筋处出现变形量突变。根据有限元分析结果,将筋的宽度增大到40 mm,使得在同一条筋上高筋和矮筋受弯矩的变形量近似相同。
3.4 柔性支撑设计
在反射镜设计中,反射镜的轻量化设计为反射镜支撑提供最优的前提条件,而柔性支撑的选择和设计是解决反射镜在重力场和温度场变化时保证反射镜面形在一定范围内变化的手段[11]。
柔性支撑的结构形式通常有两种,一种是可转动铰链,一种是不可转动铰链[8]。可转动铰链的柔性靠转动轴和包裹在轴上的外圈间的摩擦蠕动调节,不可转动铰链通过改变材料截面面积和长度,依靠材料本身的抗弯曲特性和抗屈服能力调节铰链的柔性[12]。
文中设计的反射镜具有3个支撑点,支撑点间距最大尺寸为1 039.23 mm。在±5℃的均匀温度变化环境下,支撑点位置最大变化量可计算为

即在均匀受热的情况下,支撑点间距离将会产生±0.013 mm的变化量。
反射镜柔性支撑件常用的两种柔性结构如图2,其产生柔性的方式都是将有效支撑设置为对称的结构形式,减小支撑的截面积,在仅有沿柔性支撑件径向的运动时,使柔性支撑件发生弹性变形,在不超出材料的屈服极限的前提下,依靠材料本身的性能使每个单独的柔性支撑件产生微小的变形,多个柔性支撑件组合可以消减外界环境变化产生的应力。

图2 两种常用柔性支撑结构Fig.2 Two common flexible support structures
在多数柔性支撑件中,柔性支撑结构中柔性大小的相关参数如图3。通过有限元分析得知,如增大参数L且减小t时,反射镜组件的柔性增加,此时反射镜的镜面面形趋好,但反射镜的谐振频率降低。如增大参数t而减小L时,反射镜的谐振频率得到提高,但是柔性降低,使反射镜面形误差增大。改变R值,对反射镜面形和谐振频率的影响都不明显,但在t和L一定时,有R越大柔性越小的趋势。
图2中的两种支撑形式都是通过改变柔性结构中最小截面面积,依靠材料本身的抗弯曲强度在重力和温度条件发生改变时支撑反射镜,并承受加速度改变时产生的应力变化。各种柔性支撑结构虽然大多数为圆形的外轮廓,但柔性环节在截面收缩后,其截面形状均近似为矩形。

图3 柔性支撑结构图Fig.3 Flexible support structure
对于具有矩形截面积的零件,通过材料的抗弯曲强度计算公式Jk=βa3b可知,其抗弯曲强度与截面矩形的宽(图3中的t)成立方关系,与矩形的长(图3中的L)成正比例关系。而根据柔性统的刚度与柔性环节的长度的0.5次方成正比,即与图3中的L的0.5次方成正比。通过以上分析可知,调整柔性结构的长度L,虽然能够得到更高的柔度,但是必将使系统的刚度快速下降。
根据上述计算和分析,需要设计一种具有新型结构的柔性结构,使得在结构柔性增加时,系统刚度降低较小或不降低。
在《空间光学遥感器反射镜柔性支撑设计》一文中,我们研究了另外一种扁平柔性支撑结构,如图4所示。

图4 扁平柔性支撑Fig.4 Flat flexible support
设计的铰链为2个直圆型铰链串联并翻转的铰链形式,再将3个串联翻转铰链并联。由于铰链的变形趋势只有两种形式:两平行串联铰链发生同向或异向弯曲,因此其应力集中位于过渡圆角与直板的接合处。结构的总柔性是各个柔性环节的柔性总和,而应力集中将分别产生于各柔性环节中,使得整个柔性结构对应力集中的适应性更好。
根据有限元分析结果,如图4所示的柔性结构中的应力最大位于图5中的r处,该处的成形质量、材料致密性和加工后的表面粗糙度都会对柔性结构的性能产生较大影响。因此在图5所示的各参数中,r值不宜过小。较大但适当的r值既有利于铰链变形过程中的应力传递,又便于加工手段的实施,还易于对加工所形成的表面进行多种检测手段的实施。

图5 扁平柔性支撑的参数示意图Fig.5 Flat flexible support parameter diagram
这种结构的特点是提供结构柔性的弯曲方向与提供结构刚度的方向垂直,使柔性和结构刚度的改变与结构参数中不同的参数相关联。之前的研究结果表明,图5中的t值对结构柔性的影响程度最大,而b值的大小对结构刚度的影响最大。这就可以实现与柔性关联的结构参数和与刚度关联的结构参数互相分离的结果。
对如图4所示结构的研究和多个项目的实际应用表明,这种结构可对中小口径反射镜提供良好的支撑,对温度环境变化较大的情况适应性良好。
对于超大口径反射镜,根据有限元分析结果,由于在受到温度变化影响时反射镜支撑点间距变化量较大,这种结构由于沿反射镜径向的位移变化量不够大,不足以在提供足够柔性的同时保持较高的结构刚度。
将图2、图4两种柔性支撑结构结合在一起,分别使用不同结构参数的设计进行计算,并分析各次有限元计算的结果,设计了如图6的柔性结构,并获得了满意的分析结果。
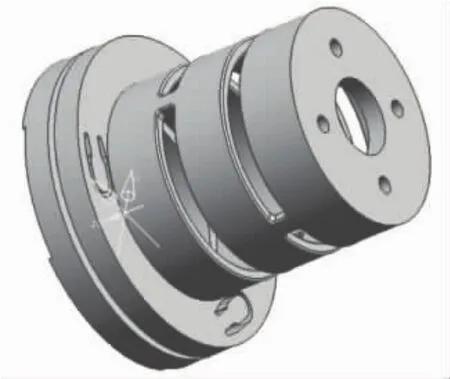
图6 柔性支撑结构图Fig.6 Flexible support structure
4 有限元分析结果
反射镜在地面上加工和装调过程中将受到不同方向的重力作用,其装调和检验环境受控,使反射镜所处的温度环境基本均衡且基本保持一致[12]。相机在装调过程中,受自身重力作用,在轨运行时受到微重力的影响[13]。相机在轨运行过程中,虽然有热控措施进行受控的主动热控调节和被动热控保持,但是由于卫星运动过程中受热面的不断变化,太阳的辐射使相机的温度不能如在实验室中一样保持稳定,而是在一定范围内变化,特别是在运行周期的后半段[14]。空间运行实际情况要求相机中的反射镜及其支撑有能力适应一定量级的力场和温度场的变化[15]。
由于反射镜在装调过程中受1 g的重力,而在轨运行阶段受微重力作用,其周围力场总变化量为1 g。根据总体要求可知,在实验室和运载阶段环境温度的变化量为5℃。
依据上述边界条件,将反射镜组件建模,进行有限元分析。计算得到反射镜面形的最大变化量为31.64 nm,如表2所示,可以满足设计输入要求的 λ/20(λ =632.8 nm)。

表2 全口径范围内三向重力与5℃温度变化引起的主反射镜面形误差Tab.2 Errors of main mirror surface with 5 ℃ temperature change and full-caliber 3-D gravity
随柔性结构的柔性增加,反射镜的动态刚度随之减低。而刚度问题是整个相机结构系统的核心问题,为了保证分辨率及成像质量,相机必须具有良好的结构动态刚度,使其在成像时不会由于外界扰动产生抖动,导致成像质量下降。
为了获取反射镜结构的动态刚度,对其进行模态分析,分析结果如表3所示。

表3 反射镜组件模态分析结果Tab.3 Modal analysis results of main mirror subassembly
不可转动铰链的柔性结构是通过改变材料截面和长度,依靠材料本身的抗弯曲特性调节铰链的柔性的,其在振动中承受的应力是否超过材料的许用应力,并是否留有足够安全裕度,是考核柔性结构是否能够满足设计要求的又一关键指标。
根据以上分析结果,提取柔性结构中支撑薄弱环节的应力最大值,与材料许用应力比较,结果如表4所示。
从表4的结果可以看出,在柔性结构最为薄弱的位置,距离其材料许用应力仍有较高的安全系数,完全可以满足系统对Ф2 020 mm口径反射镜结构刚度的要求。
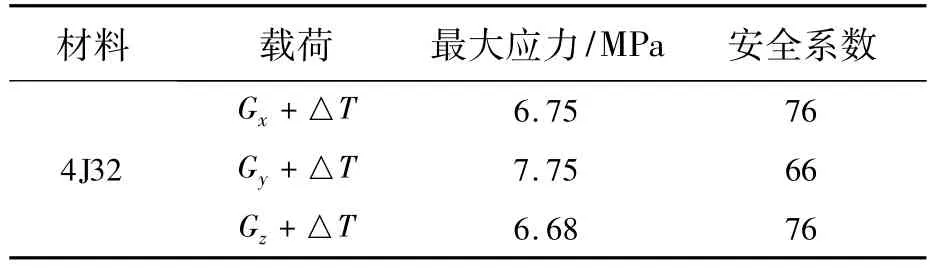
表4 主反射镜组件应力响应Tab.4 Stress response of main mirror subassembly
将主反射镜模型以设计的安装形式装入整机模型中,由12个连接点与框架对应点联接,每个连接点的约束方式模仿螺钉联接的方式设定,为一个沿螺钉轴线的轴向约束和一个绕螺钉轴线的转动约束。根据相机的工况不同,分为装调检测姿态和装星姿态两种,分析结果如表5和表6所示。

表5 全口径范围内装调检测姿态主镜在整机中的面型分析结果Tab.5 Analysis results of full main mirror surface caliber range in adjustment detection attitude in the complete machine
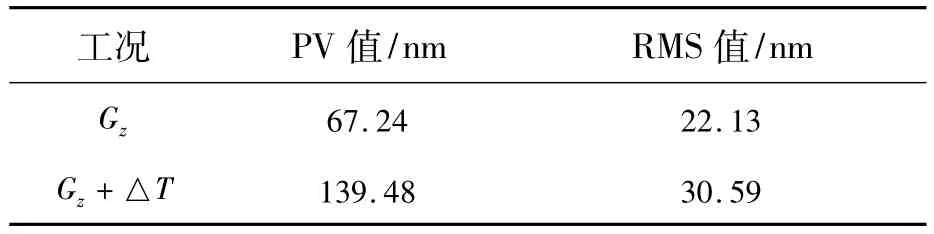
表6 全口径范围内装星姿态主镜在整机中的面型分析结果Tab.6 Analysis results of full main mirror surface caliber range in larding star attitude in the complete machine
5 结 论
本文针对某大口径主反射镜进行了详细的镜体及其支撑结构设计。为满足大口径反射镜的刚度和尺寸稳定性要求,在支撑结构中设置了双层柔性支撑环节。通过对反射镜组件的有限元分析,主反射镜在3个方向重力及5℃ 均匀温降载荷下全口径面形误差的RMS值不超过λ/20(λ=632.8 nm),且反射镜组件一阶固有频率为95.87 Hz,说明反射镜组件动态刚度足够高,柔性支撑结构在动力学环境中的最大应力响应远小于材料屈服应力,结构强度足够大。通过对整机环境下的主反射镜的有限元分析,主反射镜分别在装调检测姿态、装星姿态及5℃ 均匀温降载荷下全口径面形误差的RMS值不超过 λ/20(λ =632.8 nm),满足总体对主反射镜的设计要求。大口径反射镜应用于空间红外遥感相机,可有效提高相机的分辨率,是红外遥感相机的一个重要发展方向,本文为大口径反射镜结构设计提供了一定的借鉴意义。
猜你喜欢
新能源科技(2022年9期)2022-11-20
航天返回与遥感(2022年3期)2022-07-07
环境技术(2020年1期)2020-03-06
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
航天返回与遥感(2018年2期)2018-05-17
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
光学精密工程(2016年7期)2016-08-23
