基于局部图像纹理计算的隧道裂缝视觉检测技术
2018-05-07 00:34王耀东朱力强史红梅方恩权杨玲芝
铁道学报 2018年2期
王耀东,朱力强,史红梅,方恩权,杨玲芝
(1.北京交通大学 机械与电子控制工程学院,北京 100044;2.北京交通大学 载运工具先进制造与测控技术教育部重点实验室,北京 100044;3.广州地铁集团有限公司 工程技术研发中心,广东 广州 510335)
近年来,国内地铁进入快速发展期,以北京、上海、广州为例,2016年底城市轨道交通总里程已超过1 500 km。早期地铁隧道已经进入养护维修期,而新建成的地铁隧道,也会诱发洞体形变而出现裂缝、漏水等隧道病害隐患[1]。如果对地铁隧道裂缝不及时预警,隧道基础设施会进一步破坏,一旦发生事故,将会带来巨大的生命财产损失,所以隧道裂缝病害成为地铁隧道周期性巡检的重要任务之一。
我国隧道裂缝检测主要依靠人工巡检和手工标记,随着计算机视觉技术的发展,利用图像采集和处理技术,代替人眼完成隧道裂缝的自动检测,成为一个新的发展方向。隧道裂缝图像采集和检测系统,可以实现隧道裂缝图像的快速采集和裂缝区域检测,为隧道衬砌裂缝的检测提供一种准确、便捷的方法,对保证隧道长期安全稳定的运行具有重要意义,也是未来地铁隧道综合检测的研究方向。
目前,地铁隧道表面裂缝图像采集系统往往利用大型车载式结构,针对小型检测车的紧凑型采集系统研究较少。本文基于小型检测车,设计了移动可调节的隧道裂缝图像采集系统。利用多目高速线阵相机,配合大功率激光光源,采集隧道表面的裂缝图像。针对地铁隧道的检测环境,高速线阵相机和激光光源安装于一个可调角度的圆柱形旋转支架上,可以对准局部区域进行灵活的图像采集,整体视觉系统可以在小型移动式检测车上左右滑动,以得到目标分辨率和视场范围的隧道裂缝图像。在裂缝图像处理的算法研究中,本文提出基于分块图像的特征识别算法,在分块图像预处理的基础上,设计图像子区域纹理骨架特征计算模型,滤除伪裂缝纹理图像的干扰,实现裂缝图像的检测。
1 相关工作与研究方案
1.1 隧道裂缝检测技术研究现状
在国外,欧美、日韩等国家和地区在隧道裂缝检测技术的研究起步较早,文献[2]设计了基于线阵CCD相机的图像采集装置,利用传统的图像处理算法进行裂缝检测,但图像分辨率不高,且所支持的运行速度较慢。文献[3]设计了一种裂缝快速检测系统,并提出一种客观的评价裂缝的方法,但在图像识别算法上研究较少,且使用的卤素灯照度较低,难以应用于高速采集。德国和瑞士等研究机构,利用激光扫描技术进行隧道裂缝检测,但像素分辨率和检测精度有待提高[4]。日本研制了公路隧道裂缝检测车,主要利用面阵相机采集图像,但后期需要大量的图像拼接处理,效率较低[5]。
在国内,文献[6]利用数码相机进行定点拍照采集图像,并进行裂缝的边缘提取。文献[7]设计了图像采集方案,并对裂缝图像进行简单的预处理。文献[8]构造了两个分类器分别检测路面裂缝和区分裂缝种类,但针对纹理复杂、噪点较多的地铁隧道裂缝,分类检测算法适用性较差。文献[9]针对衬砌裂缝图像的特征提取,结合边缘检测与通用的OTSU算法,设计了梯度类间阈值法,图像背景简单,不涉及实际隧道中虚假裂缝的识别,所用采集方案为单目低速采集,也没有采集系统的样机介绍。文献[10]利用面阵数码相机拍摄隧道裂缝图像,进行图像处理和参数检测,但不具有自动图像采集功能和硬件系统;所设计的识别算法基于全局纹理检测,对于线阵相机采集的图像,裂缝检测速度慢、噪声较多、识别精度低,需要进行算法改进。文献[11]提出基于最小代价路径搜索的路面裂缝检测算法,通过裂缝种子点提取裂缝,但不适用于地铁隧道裂缝图像。
国内外针对公路、隧道、混凝土结构的裂缝,研制了图像采集系统和算法理论[12]。然而,图像采集系统的分辨率和清晰度有待提高,紧凑型检测设备较少,使用灵活性有待提高,对于复杂的暗光环境,适用性不高。理论研究中,针对路面和混凝土面的裂缝检测算法较多,对于地铁隧道图像处理算法,不适用于噪声多纹理复杂的图像。本研究针对地铁隧道场景,设计了多目高速线阵相机和特殊光源相结合的紧凑型、移动式图像采集系统,并研究了图像识别算法,从而实现隧道裂缝的自动检测。
1.2 裂缝图像采集与检测技术系统方案

图1 裂缝图像采集与检测技术方案
利用轨道交通的特点,设计可在钢轨上运行的检测车,实现移动式图像采集。由于隧道光照条件差,且需要高质量图像进行后续图像处理,为了避免图像数据冗余,选用高速线阵相机,配合大功率激光源实现裂缝图像的连续采集。设计光源与相机采集模块、可调节支架的机械装置,对裂缝区域进行成像。采集系统安装于移动式检测平台上,进行隧道裂缝图像的连续高速采集,并将图像数据存储于工业计算机中,如图1所示。
在裂缝图像处理算法研究中,针对采集到的连续高分辨率裂缝图像中整图全局检测精度较低的难点,设计隧道图像区域分割算法,将裂缝图像分成子区域,并通过区域裂缝特征分析算法完成检测。
2 隧道裂缝图像处理的检测算法
线阵相机图像采集系统可以连续采集裂缝图像,避免了面阵相机采集图像的重叠和数据冗余。线阵相机分辨率高、图像数据量大,为提高局部检测效果,将图像分块为子区域图像,最后实现裂缝的检测和区域标记。
裂缝检测算法流程如图2所示,对原始图像进行全局图像的预处理操作,并进行分块化处理。对子区域图像进行匀光和增强处理,突出裂缝纹理特征。利用直方图分析法滤除非裂缝区域,减少计算量,并将图像进行二值化分割。对于二值图像,研究纹理提取和特征判断,最后实现裂缝识别。

图2 裂缝图像检测算法流程
2.1 图像预处理与区域分割
隧道衬砌表面纹理不具有RGB三通道的色彩空间分布,线阵相机以8位灰度值采集连续图像,其像素灰度值记为G(w,h),其中图像高度h对应线阵相机的分辨率,宽度w为线阵相机采集定义的连续像素列数,由用户需求定义,一般取w≥h。
线阵相机与激光光源配合采集图像,存在中心与周边图像灰度值的差异,影响图像处理效果,需要进行图像灰度级均衡化和归一化处理。计算图像G(w,h)中灰度值为g的像素的累计概率值PG(w,h)(g)。
( 1 )
式中:n(i)为灰度值为i的像素出现的次数;N=w·h为图像G(w,h)中所有的像素数;L为可能的图像灰度级数目。
利用图像灰度值累计概率值,将所对应的像素灰度值变换到归一化的像素域中,定义H(w,h)为归一化后的图像,则新的图像中每个像素对应的灰度值gH(w,h)为
gH(w,h)=PG(w,h)(g)·(gmax-gmin)+gmin
( 2 )
式中:gmax为原始图像中最大的像素灰度值;gmin为原始图像中最小的灰度值。调整图像灰度值对比度时,会增强一些散点噪声。
利用图像滤波算法降低噪声,本文利用均值滤波进行图像预处理。定义矩形窗口大小为s×t,均值滤波后的图像M(w,h)为
( 3 )
式中:Sw,h为均值滤波窗口的中心点与均衡化图像H(w,h)重合时,窗口内所有像素点的坐标集合。
由于线阵相机采集的图像具有较高的分辨率,对于预处理后的图像M(w,h)直接进行裂缝检测的精度较低,所以,将其进行分块化处理,在分块区域内完成局部裂缝特征的识别。将图像分为大小为x×y的子区域图像,则滤波后的图像M(w,h)可以表示为
M(w,h)=I1(x,y)+I2(x,y)+…+IN(x,y)
( 4 )
式中:下角N为子区域图像的数量,N=w·h/(x·y)。整幅图像分割为区域图像In(x,y),n=1,2,…,N,分块参数取值,保证w,h可被x,y整除,以便后续针对分块图像设计裂缝检测算法。
2.2 图像匀光拉伸处理与背景滤波
试验中发现,对于整幅图像使用匀光处理,往往使图像的局部纹理灰度和对比度降低,影响裂缝特征的分析。本文对分块后的子区域图像进行匀光计算,以保护裂缝纹理在局部区域的灰度表现。基于图像加性模型,光照不均图像In(x,y)可以表示为均匀图像ID(x,y)与背景图像IG(x,y)的和。对于目标得到的均匀图像,可以表示为原始图像与背景图像的差值。
ID(x,y)=In(x,y)-IG(x,y)+λ
( 5 )
为保证运算前后图像灰度值分布的一致性,引入灰度偏移量λ进行补偿。本文的匀光算法利用二维离散高斯平滑得到背景图像IG(x,y),其卷积核函数H(i,j)为3×3离散高斯卷积核;灰度偏移量λ通常取原始图像的全像素灰度均值。
IG(x,y)=In(x,y)*H(i,j)
( 6 )
式中:X,Y为图像In(x,y)的宽度和高度,N(x,y)为图像的像素点个数。因此,可以得到均匀图像ID(x,y)为
ID(x,y)=In(x,y)-In(x,y)*H(i,j)+

原始图像匀光处理后,由于图像相减造成了对比度偏低,所以利用对比度线性拉伸算法,增加图像的反差和细节纹理信息,如式( 9 )所示。
( 9 )
式中:β为处理拉伸参数,根据经验取β=32。对于裂缝图像的纹理特性,其背景图像占据较大面积,而裂缝纹理数据信息较少。基于此特征,可以对分块图像进行直方图分析,初步滤除大面积的背景图像,保留裂缝纹理区域。对区域拉伸图像IE(x,y)进行灰度均值计算。
式中:NE为图像IE(x,y)中所有像素点的个数。计算图像区域内所有像素点灰度值的方差,分析图像区域的纹理特征灰度变化量。
利用背景灰度值分布相似性,根据式(11),可以计算得出图像中每个分块区域的像素灰度方差为VE,定义一幅图像中所有分块图像的灰度方差为Vn,n=1,2,…,N,其中N为一幅图像的分块区域数量。最后,对每一幅待检测图像,利用分块图像灰度值方差的最大值和最小值计算阈值。
TB=f[max(Vn)-min(Vn)]
(12)
式中:f为背景滤波系数。因为图像的背景滤波为初级滤波,所以为了尽可能保留裂缝纹理,滤波系数一般取0.5~0.6,可以去除明显的背景区域。由此,利用式(13)进行背景滤波,简化运算。
对于图像区域像素值大于TB的保留其图像纹理灰度值,进行下一步纹理特征分析,其他区域则视为背景图像,不参与后续计算。
2.3 区域特征判断与裂缝识别
目标图像经过上述算法处理后,按照阈值分割后的二值图像进行裂缝特征判断。利用图像最大类间方差法进行阈值分割,对待测图像IB(x,y)进行二值化处理。对于不同的图像,计算得到对应的最佳阈值kB,则二值化图像为
二值分割后的图像,裂缝纹理灰度值与背景灰度值,分别按照0和255表示。对于图像中灰度值为0的像素点,包括主要的裂缝纹理成分、虚假裂缝及噪点成分,设定其最大外接正方形表示连通区域,即为可能的裂缝纹理像素区域,定义为αk(x,y)。
根据裂缝图像处理试验的经验,候选裂缝像素区域αk(x,y)的噪点主要为离散点状或块状纹理,虚假裂缝则为污渍或水痕,如图3所示。对于点状和块状噪点图像,利用连通区域的二值纹理占空率可以去除虚假裂缝图像。检测过程为
式中:τk为候选裂缝像素区域αk(x,y)的二值目标纹理的像素点个数;Nk为像素区域αk(x,y)的总像素点个数;βk为二值纹理占空率。
对于类似裂缝的隧道表面污渍和水痕等纹理,本文根据真实裂缝和虚假裂缝的特征差异性进行识别。真实裂缝纹理宽度小,而虚假裂缝纹理宽度较大;真实裂缝纹理区域走向单一,而虚假裂缝纹理区域走向复杂;真实裂缝二值纹理的骨架与原图差异小,虚假裂缝二值纹理骨架与原图差异大。
基于以上特性,提出候选裂缝像素区域αk(x,y)的骨架图与二值图的比例,从而自动识别真实的裂缝图像。首先进行连通区域图像纹理的骨架提取[13],设目标像素点标记为1,背景点标记为0。定义边界点是本身标记为1,而其8连通邻域中至少有一个标记为0的点。以边界点为中心的8邻域,定义中心点为P1,其邻域的8个点顺时针分别为P2,P3,…,P9,如图4所示,算法对边界点进行两步处理。

P9P2P3P8P1P4P7P6P5
图4 细化算法示意
步骤1标记同时满足下列条件的边界点。
式中:N(P1)为P1的非零邻点的个数;S(P1)为以P2,P3,…,P9,P2为序时,这些点的值从0到1变化的次数。当对全部边界点都检验完毕后,将所有标记的点去掉。
步骤2标记同时满足下列条件的边界点。
式(18)的前面两个条件同式(17),后两个条件不同。同理,对全部边界点计算完成后,将所有标记点删除。式(17)、式(18)组成一次迭代运算,对连通区域αk(x,y)进行反复迭代运算,直至没有满足标记条件的像素点出现,此时剩下的点成为本图像区域的二值骨架图φk(x,y)。
如图5所示,骨架提取算法对于裂缝纹理的整体形态影响不大,二值分割后的图像与骨架图像的像素点总数差异较小。对于虚假裂缝,由于其自身的纹理复杂性,骨架提取后的整体形态有明显改变。故利用此纹理特征进行裂缝识别。

图5 裂缝纹理与虚假裂缝纹理的骨架示意
计算二值图像中目标点个数τk与骨架图像中目标点个数ωk的比值。
利用式(20)结合地铁隧道图像进行试验判断,对于裂缝纹理图像,裂缝宽度一般在5个像素以内,宽度变化均匀,其比值γk不超过5。对于虚假裂缝纹理,连通区域形态复杂,其比值γk一般在5以上,所以此方法可以较好地判断辨别裂缝的真伪。
3 移动式裂缝图像采集系统
移动式裂缝图像采集系统可在轨道上运行,并对隧道表面进行快速图像采集,主要包括隧道图像采集系统和移动式轨道小车两部分。图像采集系统将成像设备集成于可调节支架上,设备支架安装于轨道小车上,可以根据不同的隧道尺寸调节。
3.1 多目相机图像采集方案设计
线阵相机每次采集一列一维像素,通过相机的定向移动形成二维图像。对于地铁隧道的定向移动式特点,图像采集方案选用线阵相机。
(1)线阵相机具有连续采集性能。隧道中检测设备为轨道上定向移动,选用线阵相机可以进行连续拍摄形成二维图像,避免了图像重叠和数据冗余。
(2)隧道中照明不佳,面阵相机需要大面积的强光源进行补光,但仍存在暗角现象。大功率激光光源具有稳定聚集的特点,适用于弱光下的图像采集。
(3)线阵相机具有高分辨率采集性能,通过设备的定向运动,对隧道表面进行扫略式图像采集,分辨率和采样速率高于面阵相机,可用于宽度细小隧道裂缝的图像采集和分析。
结合以上线阵相机的特性,本系统采用多目高速线阵相机,如图6、图7所示,利用线阵相机与大功率线光源交替安装,高速相机采用图像采集卡进行设置和实时数据的传输、存储。工控机采用固态硬盘配合Raid卡实现图像数据的快速存储。
1941年4月4日,熊式辉向蒋介石进言:“领袖只宜以思想领导干部,功名利禄,只能奔走一般中下之士,凡为革命奋斗冒险犯难而不辞者,皆思想上信仰力之驱使,故把握正确的思想路线是第一要务。”㊾实则亦是针对蒋以功名利禄笼络干部的做法提出的改进意见。

图6 多目相机图像采集方案设计

图7 多目相机图像采集装置
3.2 多目相机图像采集系统设计
3.2.1 多目相机采集装置
本文利用3个高速线阵相机,配合两个特制激光光源进行图像采集,对于隧道裂缝病害集中部分,可以调节相机位置,采集重点裂缝区域,如图7所示。
图7(a)中的旋臂装置,可间隔安装三个相机和两个光源,对于不同尺寸的隧道断面和不同距离的裂缝病害,可以调节成像位置。图7(b)中旋臂装置为可以左右平移和绕轴心旋转的导轨支架,用于线阵相机与线状光源的对齐调节。整体采集装置可以安装于检测车上,实现横向和纵向的位置调节。采集装置参数见表1。

表1 采集装置参数
3.2.2 高速线阵相机与配套光源的选型
本系统选择高速工业线阵CMOS相机ral6144,水平/垂直分辨率为6 144 pixels,最大线速率80 kHz,理论上可以满足检测小车最大20 km/h的运行速度,并预留外触发接口用于不同速度的图像采集。图像采集中,间隔1 024行像素保存图像,即图像尺寸为6 144×1 024 pixels,分块图像为384×256 pixels。本系统选择波长808 nm、最大功率50 W的线状激光光源。该光源利用特制镜头将光集中成一条线状光带,提供稳定的强光源用于高速线阵相机的拍照。
为保证通光量和成像稳定性,选择机械固定的大光圈定焦镜头FL-YFL5028工业镜头,焦距为50 mm,光圈范围F2.8~F22,可以满足线阵相机的成像要求,对于不同尺寸的隧道,需要计算手动调试参数。试验中,本样机利用不超过2 m/s的速度进行图像采集,后续可基于自主运行的轨道小车进行编码器外触发图像采集。
4 试验结果与分析
4.1 检测系统软硬件参数设置
线阵相机与光源通过手动调节与配准,设置相机与采集卡参数:增益为600,对比度为2,曝光时间为300 μs,采样频率(行频)为3 000 Hz,镜头光圈F4,在人工手推速度下可获取清晰的裂缝图像。本文利用Matlab软件的GUI功能设计界面,对图像进行离线处理,图8表示处理前后的图像结果。系统处理6 144×1 024 pixels的裂缝图像,平均处理时间为2.6 s。本系统利用线阵相机进行高速图像采集,算法软件在后期离线处理裂缝图像。

图8 裂缝图像处理软件界面
4.2 裂缝图像检测算法分步验证试验
分步试验如图9所示,其中图9(a)为原始图像,图9(b)为背景滤波与二值化分割后的图像,即图像中裂缝纹理和灰度值接近裂缝的噪声纹理像素点灰度值是0,呈现黑色;背景呈白色,像素值是255。图9(c)为基于分块区域裂缝特征分析后的图像,可将图像中的噪声大部分滤除掉。图9(d)为裂缝纹理识别后的图像,即将滤除噪声后的图像中的裂缝骨架提取出来,完成真伪裂缝的辨别,可清晰地观察到裂缝的纹理走势。图9(e)为使用红色矩形框将裂缝标注出来的图像,将裂缝区域从识别的图像区域中自动标记,可为裂缝参数计算提供数据支持。

(a)原始裂缝图像

(b)预处理后的二值图像

(c)分块区域特征分析图像

(d)裂缝纹理细化骨架图像

(e)裂缝特征提取与标注图像图9 典型裂缝图像的检测试验
从结果看出,对于图像背景和裂缝对比度较好、灰度值差异较大的图像,在匀光算法和二值化分割后,图像中裂缝特征明显,背景干扰少,可快速实现裂缝区域的识别与标记。而对于图像中裂缝纹理与背景灰度接近的图像,会出现较多的噪点,通过区域分析算法,也可以较好地滤除背景噪声,识别裂缝区域。然而对于细小裂缝纹理,存在一部分像素点灰度值与背景灰度值相近的情况,导致裂缝区域分析和骨架提取的过程中产生一定的裂缝区域断裂情况,但是仍可以分段识别标记裂缝区域。
4.3 裂缝图像检测试验
为了验证本文设计算法的适用性,选取了50幅混凝土表面裂缝图像进行检测试验。图10所示为6幅选取的裂缝图像,其裂缝纹理区域具有不同的宽度、长度和走向,图像背景的噪声干扰较小。本算法可以正确地检测普通混凝土表面裂缝图像,对于50幅背景简单的图像,裂缝识别率达到0.92,由于分块处理的细节像素点损失,存在一定的裂缝断裂现象,但不影响整体裂缝的判断。

图10 普通裂缝图像检测试验
地铁隧道表面图像纹理多样,图像背景噪点干扰较多。为了验证算法对隧道纹理图像检测的有效性,对50张实际地铁隧道的裂缝图像进行试验,裂缝区域的检测率为0.84。图11为选取的6幅地铁隧道裂缝图像试验效果图,其中图像背景简单的裂缝图像,本算法可以快速准确地检测出裂缝区域;对于背景噪点干扰多、背景灰度值接近的裂缝图像,其裂缝纹理出现一定的断裂情况,但同样不影响整体裂缝纹理区域的识别。

图11 复杂纹理的隧道裂缝图像检测试验
4.4 试验讨论
采集系统按照成像方式分为面阵和线阵,按照尺寸分为大型车和小型车。本文研究目标为小型车线阵成像方式,此方案更加紧凑稳定。而大型车的采集则具有更高的复杂度和速度,对图像质量要求更高,本团队也正在进行此检测技术的研究。
理论算法的研究,对于背景简单、噪点少的裂缝图像,识别效果基本满足需求,见表2,基于采集的图像样本数据,试验的识别率达到0.96。然而,真实隧道图像存在更多的干扰,特别是老旧线路中渗漏水、噪点和低对比往往降低了检测精度,本文所用50张裂缝样本的检测精度为0.84。在图像处理算法上,为了达到更高的识别率,避免漏检裂缝,通常会造成一定的误检,将图像中部分虚假裂缝误识别为真实裂缝,本文所提算法对综合裂缝图像样本的误检率为0.19。对于实际中遇到的识别精度问题,未来在算法研究上,我们将引入深度学习理论和半监督学习理论,努力改进以提高真实裂缝图像的识别率,并降低虚假裂缝的误检率。

表2 试验结果分析
本文在试验中对比了几种典型的隧道图像检测算法,包括基于图像匀光处理的裂缝检测算法[14],基于SVM的裂缝识别算法[15],基于最大熵分割的裂缝检测算法[16]。基于图像匀光的算法可以保留裂缝特征,但对噪声的滤除效果最差。基于最大熵分割的检测算法对普通裂缝图像检测精度为0.76,对复杂裂缝图像的检测精度为0.71。基于SVM的裂缝识别算法对于普通裂缝图像的识别率达到0.97,但其主要针对线型结构噪声具有良好的滤除效果,对地铁隧道裂缝图像的识别率为0.82。本算法对隧道裂缝图像的识别率为0.84,效果最好,但对普通裂缝图像以及线型噪声的滤除效果低于基于SVM的识别算法。
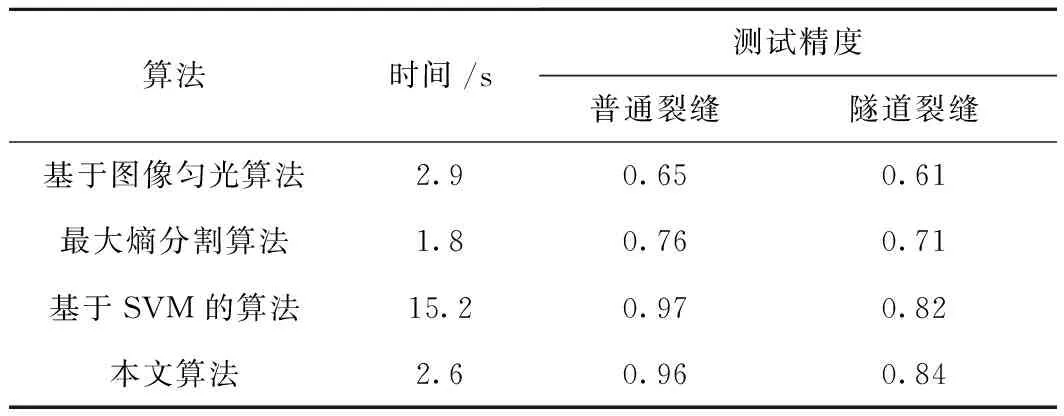
表3 试验结果对比
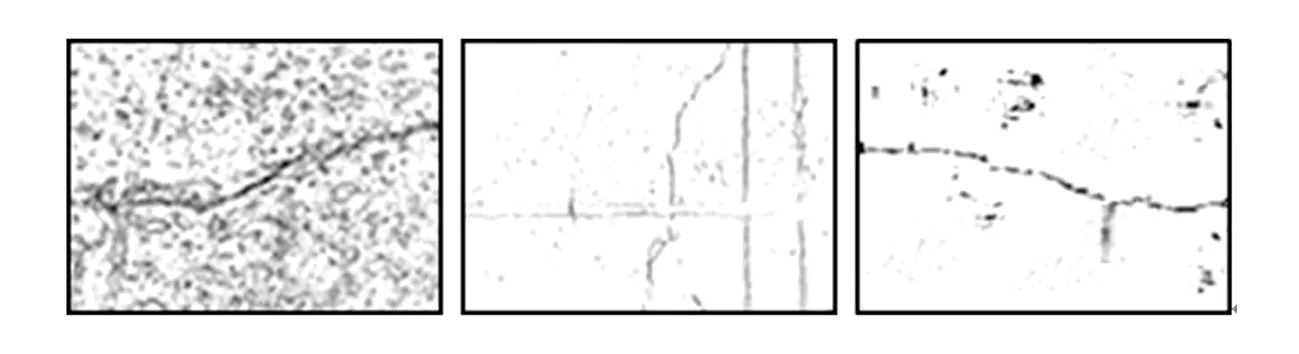
在图像处理时间上,基于图像匀光的检测算法处理时间为2.9 s;基于最大熵分割的算法处理时间为1.8 s;基于SVM的裂缝检测算法对每幅图像的处理时间平均为15.2 s,时间最长;本文提出的分块处理算法的平均处理时间为2.6 s。从计算时间和检测精度上分析,本算法的处理时间适中,后续可在提升算法性能的同时,利用GPU平行处理提高运算速度。以上算法对隧道表面裂缝图像进行检测,结果对比如图12所示。其中,图12(a)为原始图像,包括典型裂缝图像、对比度较低的裂缝图像和线型噪声裂缝图像;图12(b)为基于图像匀光算法的处理结果,由于匀光算法对相似灰度值的像素整体均衡,造成低对比图的较多噪声干扰;图12(c)为基于最大熵分割的算法,其对高对比的裂缝纹理具有较好的增强作用,噪声抑制好于匀光算法,但对大块噪声的滤出效果不佳;图12(d)为基于SVM的裂缝检测算法,对裂缝特征提取准确,滤除线型噪声效果最好,但对于块状噪声,不能完全滤除;图12(e)为本文算法,对于普通裂缝的检测效果最好,但对于线型噪声干扰存在一定的误检现象,需要后期持续改进。

(a)原始图像
(b)基于图像匀光的检测算法

(c)基于最大熵分割的检测算法

(d)基于SVM的检测算法

(e)本文提出的检测算法图12 裂缝图像检测算法对比试验
5 结束语
本研究针对地铁隧道裂缝病害,设计了轨道移动式隧道表面图像采集系统,并针对隧道裂缝纹理特性,研究了裂缝自动识别检测算法。本文设计的图像采集设备装置,可以绕中心旋转、调节角度,对感兴趣区域进行图像采集,且该采集装置可整体安装于轨道检测小车上。提出的图像处理算法,将图像分块化处理,利用连通区域的骨架纹理特性,设计了虚假裂缝纹理的识别算法。
基于研制的样机和图像处理算法,利用Matlab编制了裂缝区域自动识别软件界面,可以对裂缝图像进行自动识别和裂缝特征标记。通过对普通裂缝图像和实际地铁隧道裂缝图像的检测试验,可以达到0.96的普通裂缝检测识别率,以及0.84的真实裂缝图像检测率。未来在检测算法上需要加强对不同类型纹理噪声的适用性,在运算速度上,利用高性能服务器进行多线程平行处理设计,提高图像处理的计算效率。在图像采集装置的研制中,将简化机械结构尺寸,可以更加灵活、便捷地适于地铁隧道实际应用。
参考文献:
[1]郭一诗.融合摄影测量与激光扫描技术的隧道全断面高速动态检测技术研究[D].北京:北京交通大学,2011.
[2]YU S,JANG J,HAN C.Auto Inspection System Using a Mobile Robot for Detecting Concrete Cracks in a Tunnel[J].Automation in Construction,2007,16(3):255-261.
[3]LEE S Y,SANG H L,DONG I S,et al.Development of an Inspection System for Cracks in a Concrete Tunnel Lining[J].Canadian Journal of Civil Engineering,2007,34(8):966-975.
[4]肖书安.隧道测量技术的发展新方向[C]//2006中国高速铁路隧道国际技术交流会论文集,2006:653-657.
[5]铁信.日本新干线隧道衬砌检测车[J].现代城市轨道交通,2012,1(2):101.
TIE Xin.Japan Xinganxian Tunnel Lining Detection Train[J].Modern Urban Transit,2012,1(2):101.
[6]刘学增,叶康.隧道衬砌裂缝的远距离图像测量技术[J].同济大学学报:自然科学版,2012,40(6):829-836.
LIU Xuezeng,YE Kang.A Long-distance Image Measuring Technique for Crack on Tunnel Lining[J].Journal of Tongji University:Natural Science,2012,40(6):829-836.
[7]刘晓瑞,谢雄耀.基于图像处理的隧道表面裂缝快速检测技术研究[J].地下空间与工程学报,2009,5(S2):1624-1628.
LIU Xiaorui,XIE Xiongyao.Rapid Crack Inspection of Tunnel Surface Based on Image Processing[J].Chinese Journal of Underground Space and Engineering,2009,5(S2):1624-1628.
[8]OLIVEIRA H,CORREIA P L.Automatic Road Crack Detection and Characterization[J].IEEE Intelligent Transportation Systems Society,2013,14(1):155-168.
[9]王睿,漆泰岳,雷波,等.隧道衬砌裂缝特征提取方法研究[J].岩石力学与工程学报,2015,34(6):1211-1217.
WANG Rui,QI Taiyue,LEI Bo,et al.Study on the Characteristic Extraction of Tunnel Lining Cracks[J].Chinese Journal of Rock Mechanics and Engineering,2015,34(6):1211-1217.
[10]BAI B,ZHU L,WANG Y.Subway Tunnel Crack Identification Algorithm Research Based on Image Processing[C]//International Conference on Digital Image Processing,2014.
[11]李清泉,邹勤,毛庆洲.基于最小代价路径搜索的路面裂缝检测[J].中国公路学报,2010,23(6):28-33.
LI Qingquan,ZOU Qin,MAO Qingzhou.Pavement Crack Detection Based on Minimum Cost Path Searching[J].China Journal of Highway and Transport,2010,23(6):28-33.
[12]钱彬,唐振民,沈肖波,等.基于多特征流形学习和矩阵分解的路面裂缝检测[J].仪器仪表学报,2016,37(7):1639-1646.
QIAN Bin,TANG Zhenmin,SHEN Xiaobo,et al.Pavement Crack Detection Based on Multi-feature Manifold Learning and Matrix Factorization[J].Chinese Journal of Scientific Instrument,2016,37(7):1639-1646.
[13]ZHANG T Y,SUEN C Y.A Fast Parallel Algorithm for Thinning Digital Patterns[J].Communications of the ACM,1984,27(3):236-239.
[14]李清泉,胡庆武.基于图像自动匀光的路面裂缝图像分析方法[J].公路交通科技,2010,27(4):1-5.
LI Qingquan,HU Qingwu.A Pavement Crack Image Analysis Approach Based on Automatic Image Dodging[J].Journal of Highway and Transportation Research and Development,2010,27(4):1-5.
[15]朱力强,白彪,王耀东,等.基于特征分析的地铁隧道裂缝识别算法[J].铁道学报,2015,37(5):64-70.
ZHU Liqiang,BAI Biao,WANG Yaodong,et al.Subway Tunnel Crack Identification Algorithm Based on Feature Analysis[J].Journal of the China Railway Society,2015,37(5):64-70.
[16]洪霞,周牧,田增山,等.基于二维最大熵阈值分割的SIFT图像匹配算法[J].半导体光电,2013,34(4):156-160,172.
HONG Xia,ZHOU Mu,TIAN Zengshan,et al.SIFT Image Matching Algorithm Based on Two-dimensional Maximum Entropy-aided Threshold Segmentation[J].Semiconductor Optoelectronics,2013,34(4):156-160,172.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年6期)2022-07-02
房地产导刊(2022年4期)2022-04-19
曲阜师范大学学报(自然科学版)(2021年3期)2021-08-26
天津医科大学学报(2021年1期)2021-01-26
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
中山大学学报(自然科学版)(中英文)(2018年4期)2018-08-08
Coco薇(2017年8期)2017-08-03
自动化学报(2017年5期)2017-05-14