
基于改进PSO算法的VSC-HVDC控制器的优化设计
2017-12-18 13:23邓旗张英敏李兴源
电测与仪表 2017年21期
邓旗,张英敏,李兴源
(四川大学电气信息学院,成都610065)
0 引 言
近年来随着海上风电等新能源的大规模开发与接入,传统的电力装备、电网结构的运行技术等在接纳新能源时显得越来越力不从心[1],柔性直流(VSCHVDC)输电以其自身良好的动态无功支撑、潮流翻转时直流电压极性不变、可向弱交流电网以及无源网络供电等优势逐渐引起广泛的关注[2-4]。
控制系统是直流输电的核心,在VSC-HVDC系统中通常采用基于直接电流控制的双闭环控制器,其中内环电流控制器的作用是实现电流的快速跟踪;外环控制器实现系统有功功率和无功功率的解耦控制[5]。在目前投入的工程中,直流控制系统的控制器基本上选用的是PI控制器[6],合适PI参数的选取与否将直接影响系统的动态响应特性和其稳定性。在工程实践中,通常采用试凑法或经验法来对PI参数进行调试,但是在调试的过程中对技巧和经验的要求较高,并且调试后的参数也不一定能使系统的性能达到最优,这使得PI参数的优化成为控制器设计中的一个难点[7]。针对上述方法的不足,文献[8]根据Bode图求出在高压直流输电系统中满足其稳定性要求的PI控制器的参数范围,然后按照一定的步长对其进行划分得到有限组的样本集,再将样本逐一带入PSCAD/EMTDC中进行仿真并通过计算性能指标找到工程意义上的全局最优PI参数。但该方法依赖于步长的选择,步长太大容易使寻优陷入局部最优,优化出来的参数可能不是全局最适合的,甚至找不到合适的稳定参数;步长太小划分的样本集较多,有利于系统全局的寻优,但是同时计算量以及存储数据占用的空间大,该方法存在一定的局限性和盲目性。文献[7,9]基于高压直流输电(HVDC)系统的等效传递函数模型,采用粒子群优化算法对系统控制器的参数进行了优化,通过对电流阶跃响应的仿真结果验证了所优化出来结果的有效性。文献[10-11]通过Simplex算法对VSC-HVDC系统中控制器的参数进行了优化,得到了较为理性的效果。
针对以上方法的不足,文章首先以VSC-HVDC系统的数学模型为基础,建立了VSC整流侧定有功功率的小信号模型,进而推导出其内环电流的开环等效传递函数,基于PSO算法对外环PI参数进行了优化整定,为避免PSO算法过早的陷入局部最优解,在基本的PSO算法基础上对权重的取值进行了改进,使其兼顾“全局的粗略探测”和“局部的精细挖掘”。最后通过仿真验证了该算法的有效性。
1 VSC-HVDC控制系统的数学模型
以图1所示的VSC-HVDC系统整流侧定有功功率为例,其主要由换流变压器、滤波器、相电抗器和直流电容组成,us为公共连接点(Point of Common Coupling,PCC)电压,uc为换流器输出的交流侧电压,Ps为交流系统与VSC交换的有功功率,Is为流入换流器的电流(以流入换流器为正),R为VSC功率损耗的等效电阻,L为总的等效电感包括换流电抗电感和变压器电感。

图1 VSC整流侧系统等效模型Fig.1 Equivalent model of VSC rectifier side system
以下将基于VSC直接电流控制,通过对整流侧定有功功率控制的小信号建模推导出外环电流整定值的输出到Ps这一过程的等效传递函数[12]。
1.1 VSC-HVDC系统的控制方式
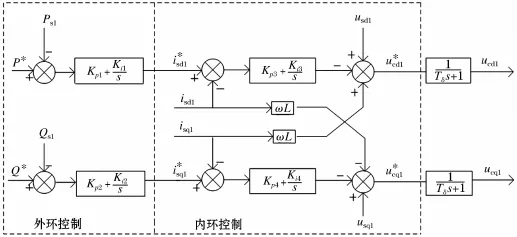
图2 有功功率及无功功率控制器框图(VSC1)Fig.2 Block diagram of active power and reactive power controller(VSC1)
1.2 内环电流控制器的小信号模型
如图1所示,在以下研究中只考虑系统的基波分量,为了实现有功和无功的解耦控制,通常以PCC点电压us为基准来构建同步旋转坐标系[14-15],其稳态数学模型为:
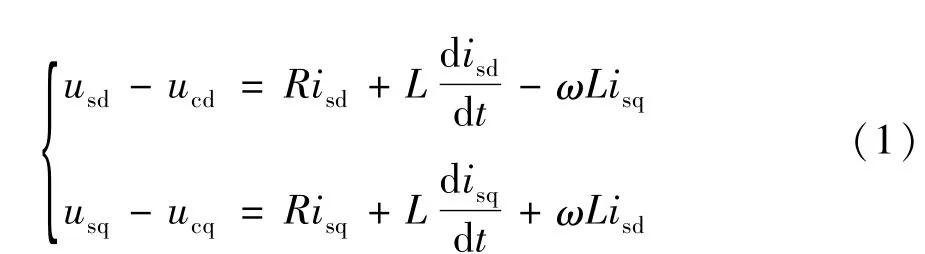
当系统在稳定点发生小扰动时,对式(1)进行线性化[16]并对其进行拉普拉斯变换可得:

式中 usd、usq和 ucd、ucq分别为 PCC点电压 us和VSC交流侧电压uc的d轴和q轴分量;isd、isq为流入换流器电流Is的d和q轴分量;ω为角频率。
而在其内环电流控制器中:
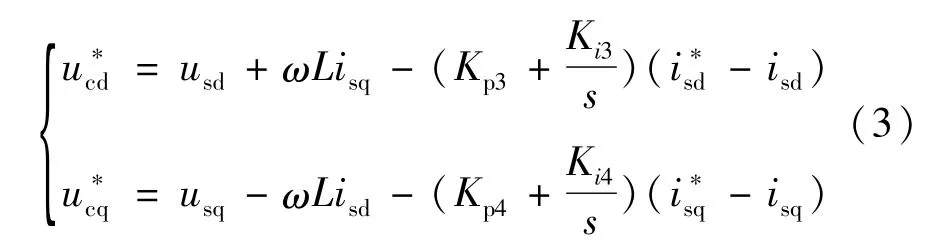
对式(3)进行线性化可得:
通常换流器具有一定的惯性,采用时间常数为Tδ的一阶环节来模拟换流器的延时[17],Tδ为换流器的开关周期,则:

对式(5)在稳定点附近线性化可得:

联立式(2)、式(4)、式(6)可得:
在本文中与VSC相连交流系统的短路比(Short-Circuit Ratio,SCR)较大,为强交流系统,并且以上的线性化是基于在稳定点附近进行的小扰动,因此Δusd≈0;通过对q轴的适当控制也可以使isq在稳态运行点保持不变[18],从而 Δisq≈0;一般换流器的开关频率较高,Tδ较小,所以在式(7)中项 Tδs(Δusd+wLΔisq)可等效为0。在此基础上可得到内环控制的d轴电流的等效闭环传递函数:

1.3 外环电压控制器的小信号模型

当以us为d轴的参考方向时,usq=0。在d-q轴同步旋转坐标系下根据瞬时无功功率理论:

对式(9)线性化可得:

式中isd0、usd0下标含0的物理量代表其在稳态工作点的值。
由式(8)、式(10)可得:从内环输入到交流系统与换流器交换的有功功率这一部分的等效开环传递函数为:

2 粒子群(PSO)优化算法
2.1 PSO算法的基本原理
粒子群优化(PSO)算法[19]是模拟鸟群觅食行为而发展起来的一种基于群体协作的随机搜索算法,在该算法中每个粒子(也就是群体中的每只鸟)都代表所研究待优化问题的一个潜在的解,所有粒子都会由其待优化的函数决定的适应度值,其值大小的程度由目标函数的具体情况来决定应该选取最大值还是最小值。PSO算法首先会在可行解的空间中初始化一群粒子,该粒子的特征由速度、位置、适应度值三项指标来表示,在每一次迭代中,每个粒子通过追踪自身个体极值Pbest和群体中极值Gbest来更新自己的位置和速度,并且在每一次更新后就要重新计算一次适应度值,通过比较新粒子的适应度值和个体极值、群体极值的适应度值来更新个体极值 Pbest和群体极值Gbest。
算法的流程:
(1)初始化:随机产生 Size(粒子群规模)个粒子,随机初始种群产生位置矩阵和速度矩阵;
(2)个体评价:将各个粒子的初始位置作为个体极值,计算每个粒子的适应值BestP,进而产生种群的最优位置以及目前群体的最优适应度值BestS;
(3)以下式来更新粒子的速度和位置,产生新的种群,每更新一次首先要检查新粒子的速度和位置是否越界。

式中 k为当前迭代次数;i=1,2,…,Size;w(t)为惯性权重;Vi为粒子的速度;Xi为粒子的位置;Pi、Pg分别为粒子个体极值和种群极值;c1为局部学习因子,c2为全局学习因子,一般取c2的值要大一些;r1和r2为0-1的随机数;
(4)比较新的粒子当前适应度值和自身历史最优适应度值BestP,如果当前适应度值优于BestP,则该适应度值赋值给BestP,从而更新了该粒子的最优位置以及最优适应度值;同理也可用于比较当前适应度值和种群最优适应度值BestS;
(5)检查结束条件(事先设定的最大迭代次数或计算精度),若满足则结束寻优;否则k=k+1;转至(3)继续搜索。
2.2 PSO算法的改进
惯性权重w体现的是粒子继承先前速度的能力,使得粒子保持运动惯性并逐步扩展搜索空间,能够起到维护全局和局部搜索平衡的作用[20]。较大的惯性权重有利于算法全局的搜索,而一个相对较小的惯性权重则更有利于局部的搜索。为了能更好的平衡算法的全局搜索与局部搜索能力,在迭代的初期使w较大,从而保持算法有较强的全局搜索能力,随着迭代的进行,使w逐渐变小以使算法在全局最优解附近进行更加精确的局部搜索,从而提高寻优的精度。本文以式(13)来定义惯性权重w:

式中wstart为初始惯性权重;wend为迭代至最大次数时的惯性权重;k为当前的迭代次数;Tmax为最大迭代次数。在这里取经验值wstart=0.9,wend=0.4。
2.3 在MATLAB中VSC-HVDC系统PI控制器参数优化的实现
PSO算法求解控制器的最优动态响应的前提是需要给出一个能表征系统性能指标的目标函数,在本文中以时间乘绝对误差积分(Integral of time multiplied by the absolute value of error,ITAE)为寻优的性能指标函数,定义为:

式中t为时间,T为仿真结束时间,对于VSCHVDC整流侧定有功功率来说e(t)即为有功功率在动态调整过程中的实际输出值与整定值的差值。该指标综合考虑了稳态误差与调节时间的关系,可使系统具有动态响应过程快速,超调量小,波动小等优点。基于该目标函数在MATLAB中进行控制器优化设计的流程图如图3所示。

图3 PSO优化PI控制器的过程示意图Fig.3 Flow chart of optimizing PI controller with PSO
在图3中,PSO将产生的粒子群(初始和更新后的种群)中的粒子依次赋值给PI控制器的参数Kp,Ki然后运行控制系统中的Simulink模型,得到该组参数对应的性能指标,其指标传递到PSO中作为该粒子的适应度值,最后判断是否退出算法。
3 电磁暂态时域仿真分析
3.1 仿真中的直流系统
为了研究整流侧定有功功率控制系统中外环PI控制器参数的优化,把在MATLAB中优化出来的控制器参数,输入到数字仿真软件PSCAD/EMTDC的模型中进行验证所优化的有效性。在本文中所使用的模型为两端的VSC-HVDC系统,左右两端成对称分布,其中换流器VSC1为整流站,采用定有功功率和定无功功率控制,VSC2为逆变站,如图4所示。
图4中的仿真参数:系统采用电压源换流器,双极运行;直流系统的额定电压为±160 kV;换流器采用SPWM调制,其开关的频率为1 980 Hz;整流侧定有功功率为200 MW;两侧交流系统的频率为工频50 Hz;交流系统的额定电压为220 kV;两侧连接变压器的变比为220/160,其额定容量均为1 000 MVA;两端的等效电阻R1、R2为1Ω;等效电感 L1、L2为0.072 4 H。

图4 两端VSC-HVDC系统结构Fig.4 System structure of two-terminal VSC-HVDC


3.2 改进PSO算法整定PI控制器参数
由上述推导出的控制器传递函数G(s)以及以式(14)为优化目标的性能指标函数,可以在MATLAB中进行参数的寻优。在粒子群算法的程序中取c1为1.3,c2为1.7;粒子群的规模为100;最大迭代次数Tmax为100。本文中待优化的参数只有整流侧定有功功率的外环PI参数Kp和Ki,其中在搜索时控制器参数 Kp的范围为[0.03,1];Ki的范围为[1,100],仿真时间设为20 s。
用粒子群算法按图3所示的流程对控制器进行优化,经过100次的迭代,最终得到整流侧定有功功率控制的最优PI参数为Kp=0.245 5,Ki=95.558 7,其性能指标JITAE=2.535 9×10-4。而初始系统外环的PI参数为Kp=0.05,Ki=50,其性能指标JITAE=4.207 7×10-4。优化前后的PI参数和性能指标值如表1所示。
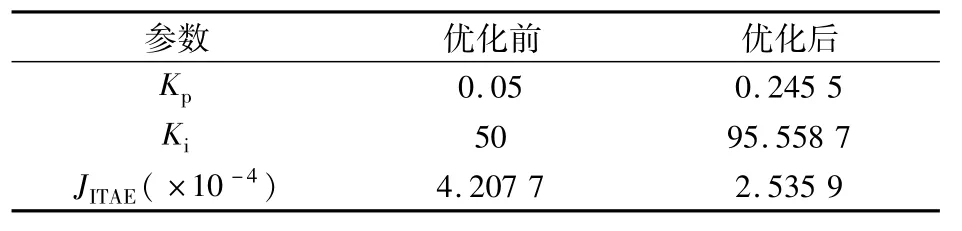
表1 优化前后的PI参数以及目标函数值的比较Tab.1 Comparison of PI parameters and objective function values before and after optimization
3.3 有功功率阶跃响应的比较
为验证优化后的PI参数的有效性,在1 s时将有功功率的整定值降低50 MW到150 MW,以观察有功功率跟踪其整定值的情况。图5为在1 s时有功功率的整定值发生变化后在不同参数情况下所对应的阶跃响应曲线。

图5 整流侧有功功率阶跃响应曲线(150 MW)Fig.5 Step response curve of the rectifier active power(150 MW)
仿真结果表明:用粒子群算法优化后得到的控制器参数,能够使柔性直流输电系统的有功功率整定值在发生阶跃变化时快速的跟踪其值,以满足动态响应性能的要求。与原始PI参数相比,优化后的控制器参数使得振荡周期从6个减小到2个,在暂态过程中系统的振荡能量明显降低,从而证明了用粒子群算法优化控制器参数的有效性。
3.4 最优PI控制器的鲁棒性检验
为验证这组最优控制器参数的鲁棒性,使系统运行在不同的工作点,观察有功功率的阶跃响应特性的变化。在仿真开始前,取整流侧定有功功率的原始整定值为100 MW,在1 s时使有功的整定值变为70 MW,图6为有功整定值为100 MW时不同控制器参数所对应的阶跃响应曲线。

图6 整流侧有功功率阶跃响应曲线(100 MW)Fig.6 Step response curve of the rectifier active power(100 MW)
图6的仿真结果表明,优化出来的控制器参数在系统运行于不同的工作状态时,对系统振荡的首摆和后续摆动都有良好的阻尼作用,使震荡幅值减小,稳定收敛的速度加快。
为了进一步验证这组参数的鲁棒性,取原始的有功功率的整定值为100 MW,在1 s时令潮流翻转,即整流侧有功功率的整定值由100 MW变为-100 MW,持续时间为0.5 s,图7为系统潮流翻转时,在不同参数状态下的系统阶跃响应曲线。
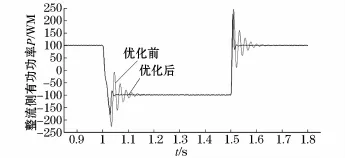
图7 整流侧有功功率阶跃响应曲线(-100 MW)Fig.7 Step response curve of the rectifier active power(-100 MW)
由图7的仿真结果可以得到,经过优化后的控制器参数,在系统潮流翻转时,跟踪整定值的速度加快,超调量减小,系统性能得到改善,测试结果表明采用优化后的PI控制器参数具有良好的鲁棒性。
3.5 优化算法的性能对比
采用文献[8]的传统优化算法,对处于稳定运行区域内的可行解进行划分,最终得出整流侧定有功功率控制的最优PI参数为:Kp=0.18,Ki=58.27,其性能指标JITAE=3.641×10-4。从目标函数性能指标上可以看出文献[8]的优化效果劣于本文所提改进粒子群算法。为了进一步验证两种优化算法的特性,对整流侧有功功率的阶跃响应进行了比较:在1 s时有功功率的整定值由200 MW减少到150 MW;在1 s时有功功率发生潮流翻转,由100 MW变为-100 MW。其仿真结果如图8所示。
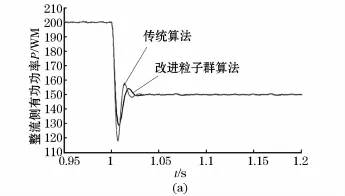
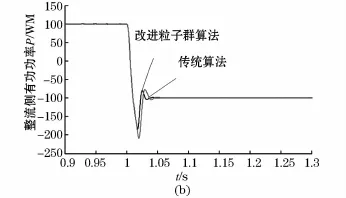
图8 两种算法下整流侧有功功率阶跃响应曲线Fig.8 Step response curve of the rectifier active power by two different algorithms
由图8可知,文献[8]中的传统算法取得了较为理想的效果,但是与本文所提改进粒子群算法相比,其振荡首摆的幅值较大,振荡的能量也较高,控制的效果相对较差。
4 结束语
根据推导出的VSC-HVDC控制系统的内环电流等效传递函数的表达式,利用改进的PSO算法对控制系统的PI参数进行了优化,在PSCAD/EMTDC仿真环境下,对系统在不同运行状态下进行了有功功率阶跃响应的测试,得到以下结论:
(1)以VSC-HVDC系统的动态性能评价指标作为粒子群优化算法目标函数的控制器参数优化方法,其控制量与整定值有很好的契合度,系统动态性能得到很大的提高;
(2)与原始的PI参数相比,本文中的粒子群优化算法使系统的动态性能指标值JITAE降低了39.7%,系统的响应特性明显提高了;
(3)优化出来的控制器参数具有良好的鲁棒性,这为PI控制器参数的寻优提供了一种系统化的方法。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
电子制作(2019年11期)2019-07-04
天津教育·下(2018年9期)2018-07-13
郑州大学学报(工学版)(2018年2期)2018-04-13
中国塑料(2016年11期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中国学术期刊文摘(2016年2期)2016-02-13
电测与仪表(2014年5期)2014-04-09
电力自动化设备(2013年11期)2013-09-18
电气电子教学学报(2012年1期)2012-10-12
