四轮转向车辆转向特性研究
2017-08-07 05:21:00乔建璐晋民杰秦维新
中北大学学报(自然科学版) 2017年4期
乔建璐, 范 英, 晋民杰, 秦维新, 荆 华
(太原科技大学 交通与物流学院, 山西 太原 030024)
四轮转向车辆转向特性研究
乔建璐, 范 英, 晋民杰, 秦维新, 荆 华
(太原科技大学 交通与物流学院, 山西 太原 030024)
为了准确研究四轮转向车辆转向特性, 基于Matlab建立了三自由度4WS模型. 以该模型为基础, 以稳态质心侧偏角为零为控制目标, 推导了三自由度4WS车辆的横摆角速度增益和转向特性的稳定性因素公式. 并分析了质心位置、 簧载质量、 轮胎侧偏刚度、 悬架侧倾角刚度等结构参数对四轮转向车辆转向特性的影响. 仿真结果表明, 质心位置、 簧载质量、 轮胎刚度以及前后悬架侧倾转向系数差的改变都会对4WS车辆的转向特性产生较大影响, 其它车辆结构因素则几乎不会对4WS车辆的转向特性产生影响.
四轮转向; 转向特性; 三自由度
四轮转向(Four Wheels Steering, 4WS)是在传统前轮转向的基础上, 增加后轮转向装置, 以改善汽车低速转向的机动性和高速转向的操纵稳定性[1-2]. 操纵稳定性的评价内容之一就是转向特性, 转向特性主要指过度转向、 中性转向及不足转向的稳态转向特性[3]. 由于转向特性具有复杂性, 考察与之相关的结构参数, 可以为4WS精确建模进而分析汽车的操纵稳定性奠定基础.
近年来, 众多学者大多将研究的重心放在后轮转向控制策略上, 对四轮转向特性影响因素的研究较少[4-7], 且四轮转向车辆的仿真大多是基于传统的线性二自由度模型进行的, 为了研究问题的方便性而作了过多的假定、 忽略或简化, 从而影响了分析结果的精确性[8]. 为了全面研究四轮转向车辆的转向特性, 本文基于三自由度4WS模型, 采用零质心侧偏角控制策略研究了各结构参数对四轮转向车辆转向特性的影响.
1 三自由度4WS数学模型
在汽车实际转向过程中, 会伴随产生车身的侧倾运动, 对汽车的转向特性产生一定的影响. 为了全面分析4WS汽车的转向特性, 本文建立包括侧向、 横摆以及侧倾三自由度的汽车操纵模型, 如图 1 所示.
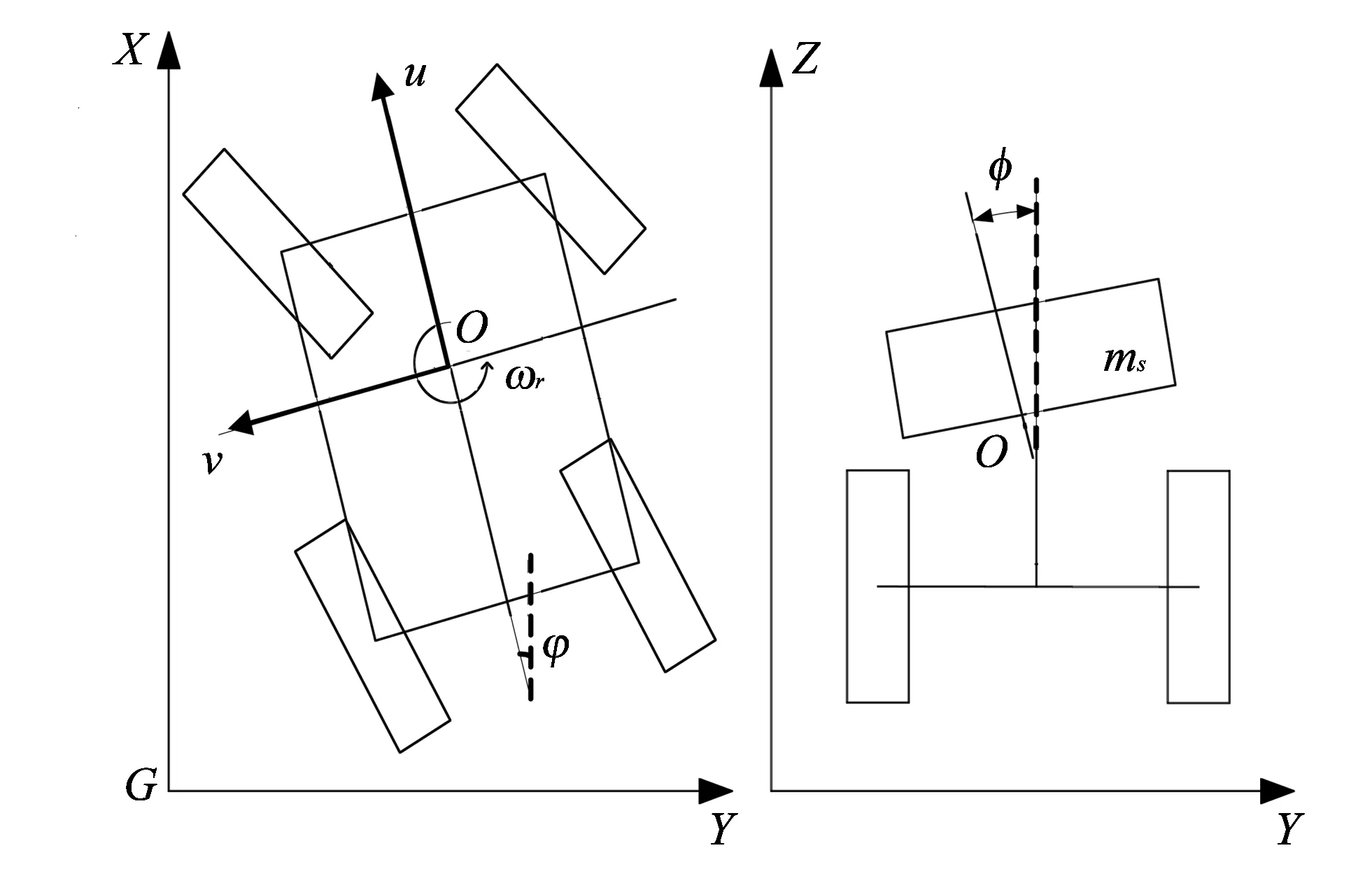
图 1 三自由度汽车操纵模型 Fig.1 Three degrees of freedom vehicle handing model
根据牛顿第二定律及牛顿矢量力学计算得到如下运动微分方程
根据轮胎的侧偏特性, 可以得到轮胎的侧偏力为
式中:u为车辆速度;β为质心侧偏角;ωr为横摆角速度;φ为车身侧倾角;p为侧倾角速度;Ff,Fr分别为前、 后轮侧偏力;δr1,δr2分别为右后、 左后轮的转角;δf1,δf2分别为右前、 左前轮的转角; 式中其它符号名称的说明及各参数的取值情况见表 1.
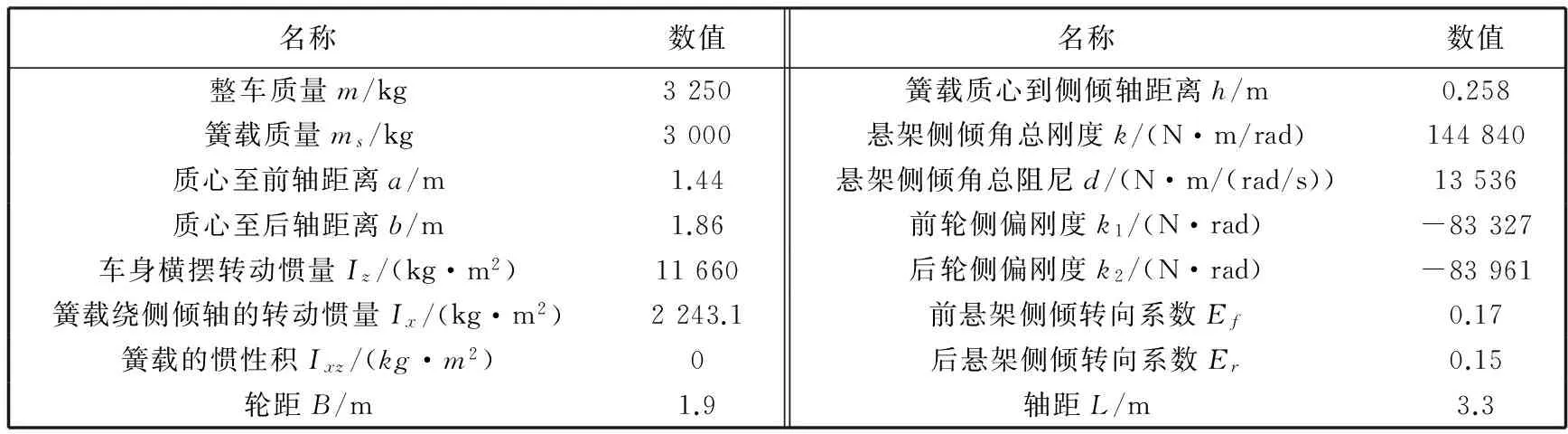
表 1 车辆模型参数

φ
同时消去β, 得到横摆角速度的增益为

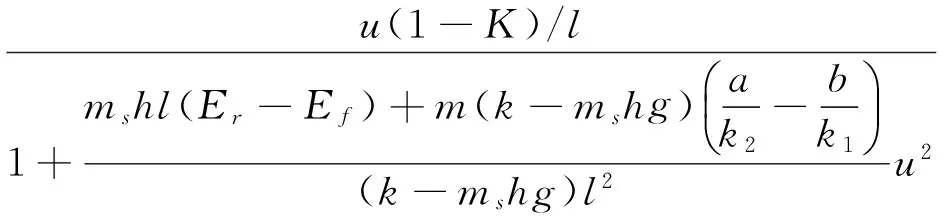
进而, 得到稳定性因素

由式(3)和式(5)可知, 与二自由度4WS车辆相比, 三自由度4WS车辆在转向特性方面的的分析更加深入, 影响参数包括质心位置、 簧载质量、 悬架侧倾角刚度、 簧载质心到侧倾轴距离、 前后轮胎侧偏刚度以及前后悬架侧倾转向系数差值. 其中, 质心位置、 簧载质量、 前后轮胎刚度对转向特性的影响最大.
令状态向量X=[βωrφp], 控制向量U=[δf1δf2δr1δr2], 将三自由度4WS模型转化为状态方程, 即
其中
2 约束条件
2.1 稳态质心侧偏角为零
为了使稳态质心侧偏角恒为零, 采用前后轮转角比例为定值的控制模式, 即右后轮与右前轮的比值为定值[9], 即
式中:a,b分别为质心到前、 后轴的距离;L为轴距;m为汽车总质量;k1,k2分别为前后轮的侧偏刚度;u为车辆速度.
2.2 阿克曼原理
阿克曼原理[10-12]的核心是车轮与地面间只有纯滚动, 不存在滑移, 即4个车轮围绕同一旋转中心转动, 由此得到其它车轮的转角[13].
2.2.1 低速转向
四轮转向汽车的低速转向时的转角关系如图 2 所示.
由图 2 可知, 四轮的转角分别为
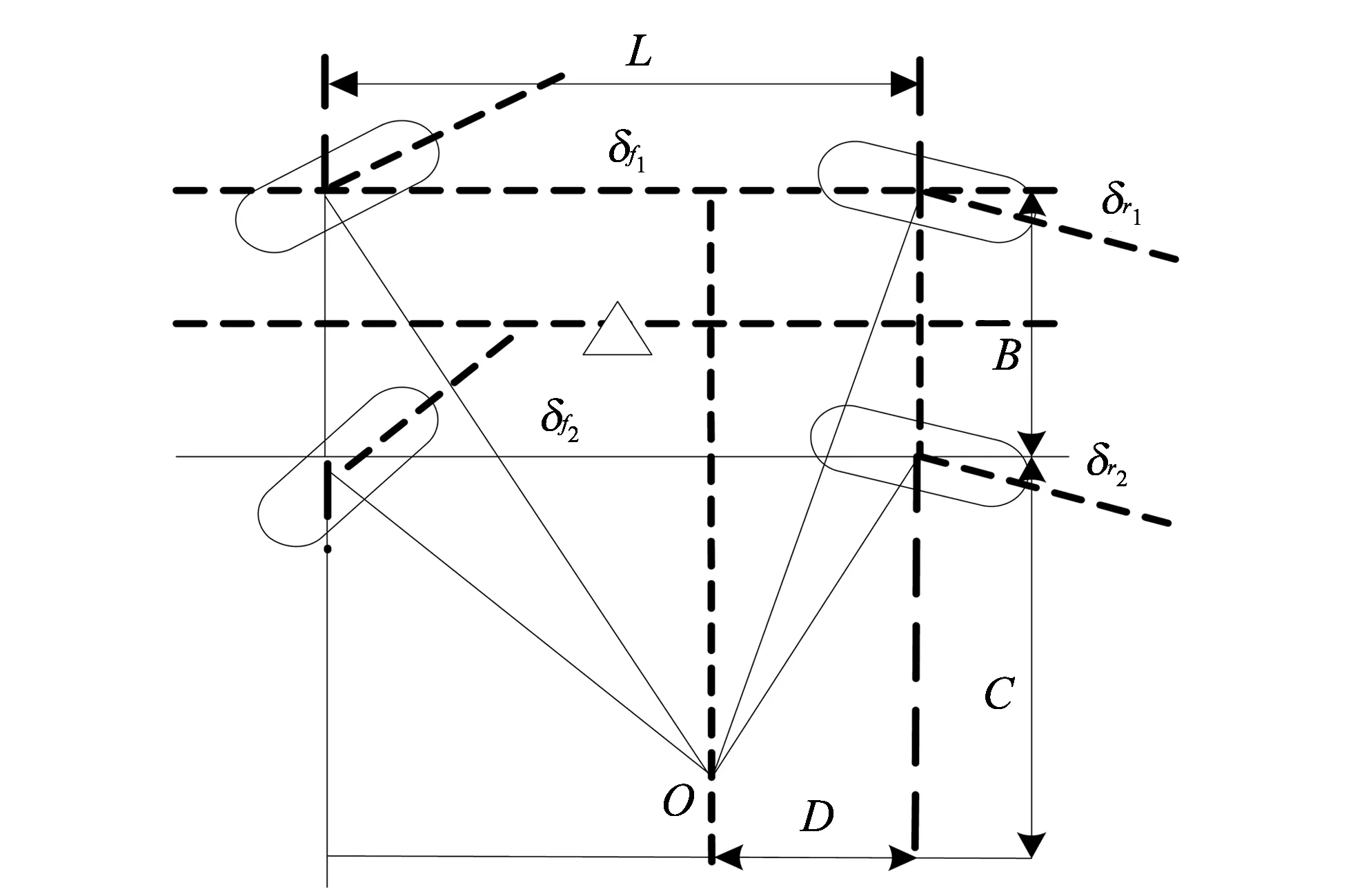
图 2 低速的四轮转角关系 Fig.2 Four wheel rotation angle relation at low speed
2.2.2 高速转向
四轮转向汽车的高速转向时的转角关系如图 3 所示.
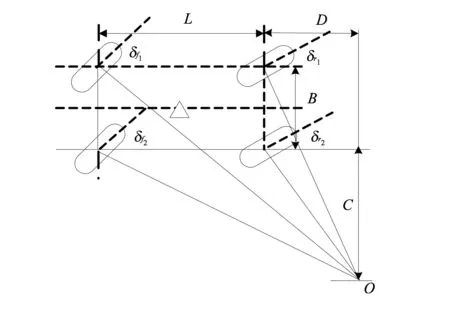
图 3 高速的四轮转角关系Fig.3 Four wheel rotation angle relation at high speed
由图 3 可知, 四轮的转角分别为
既而, 得到4WS车辆的Simulink仿真图, 如图 4 所示.
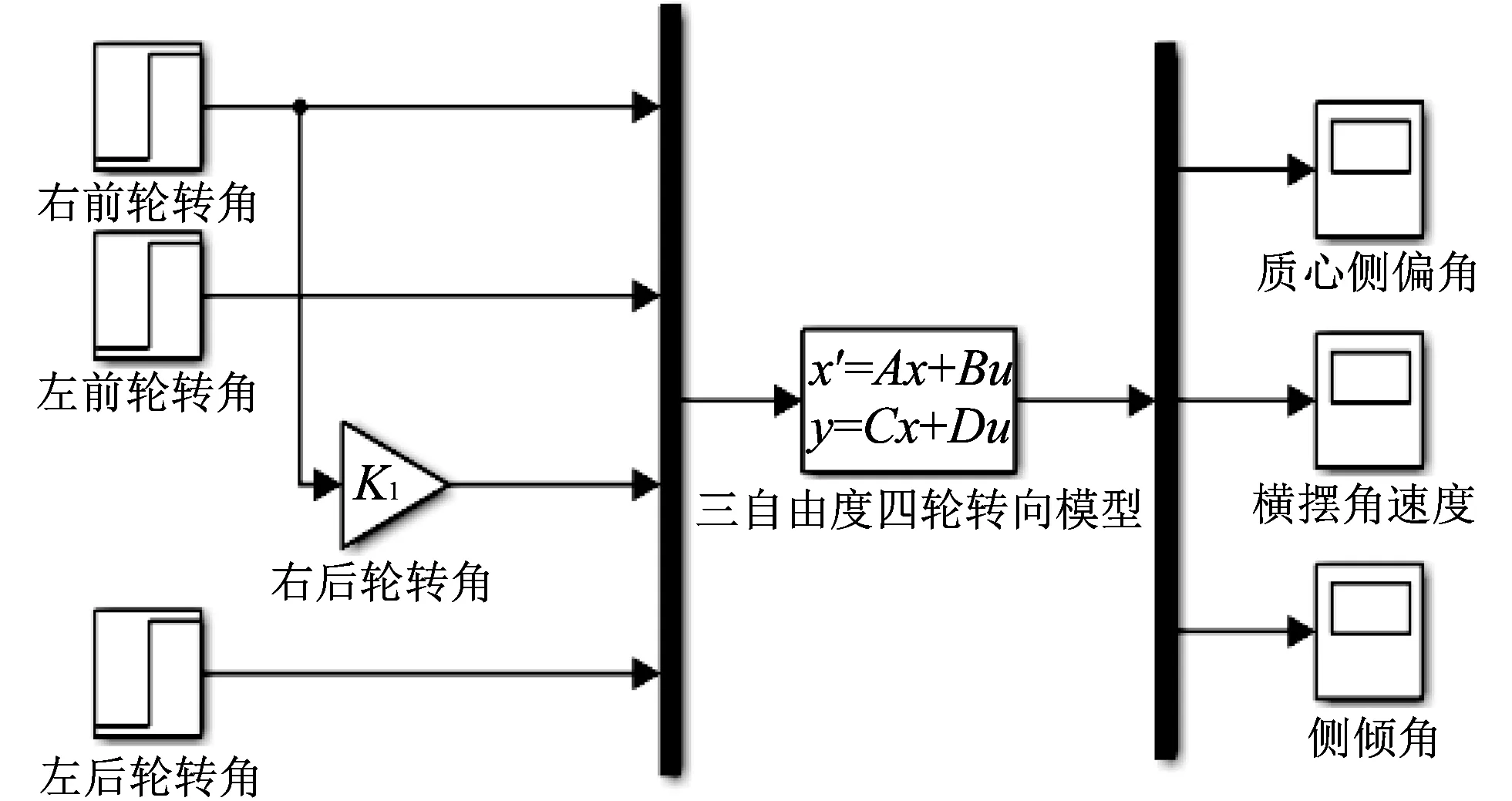
图 4 Simulink仿真图Fig.4 Simulation chart
3 转向特性分析
3.1 不同转向模式的转向特性分析
由K=0, 计算得到临界速度u=10.5 m/s, 分别在低速5 m/s和高速20 m/s对四轮转向汽车和前轮转向(Front Wheels Steering, FWS)汽车进行角阶跃仿真分析[14], 得到横摆角速度和侧倾角响应曲线, 如图 5 和图 6 所示.
由图 5 可知, 低速转向时, 4WS车辆的横摆角速度稳态值大于FWS车辆的横摆角速度值. 由转弯半径公式R=u/ωr可知, 4WS车辆具有更小的转弯半径, 机动性较好; 高速转向的结果与之相反, 此时的4WS车辆具有更小的横摆角速度稳态值, 从而增加车辆不足转向趋势, 提高操纵稳定性.
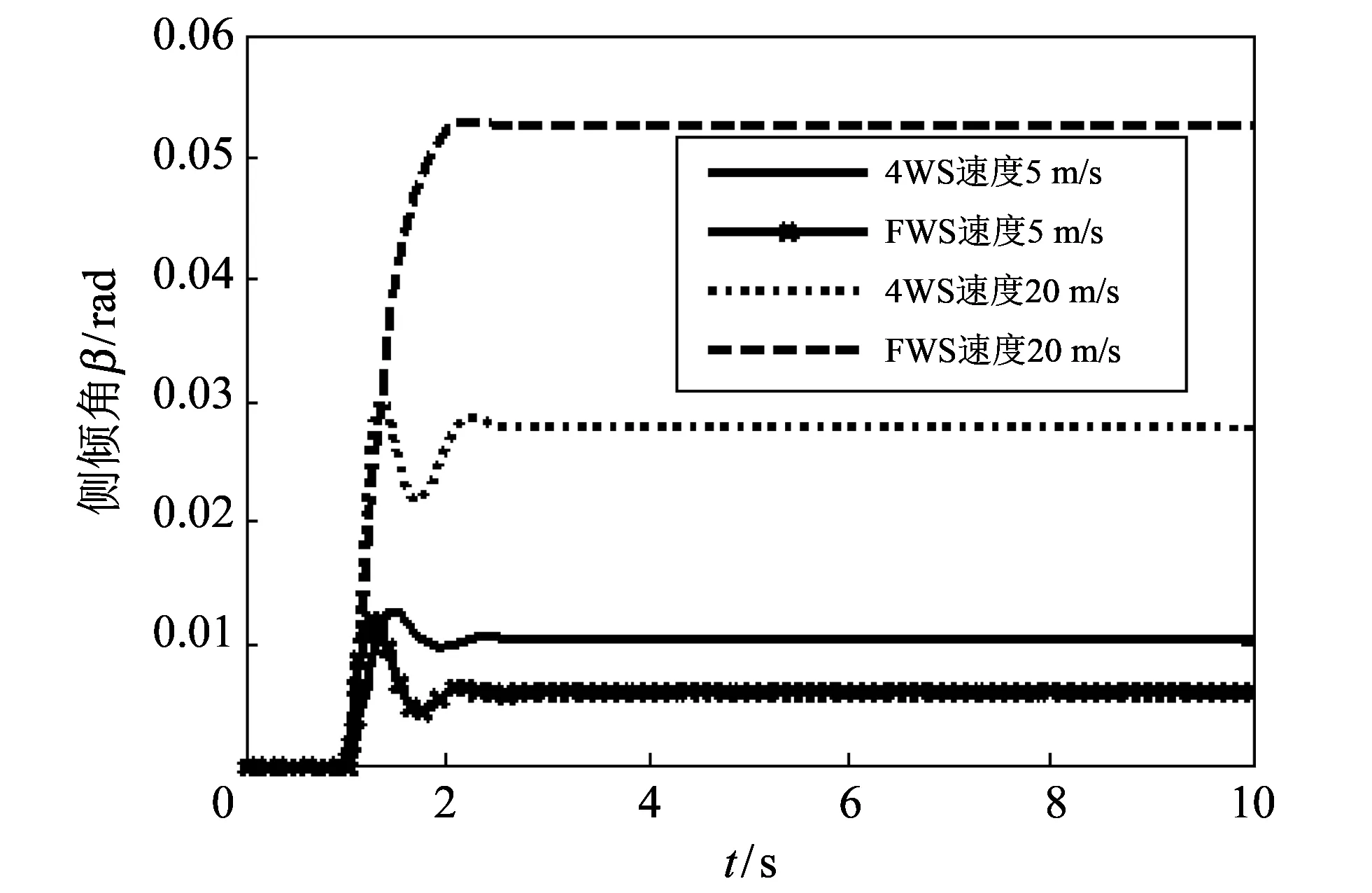
图 6 不同转向模式对应的侧倾角图Fig.6 The roll angle of the different steering modes
由图 6 可知, 低速转向时, 4WS车辆的稳态侧倾角大于FWS车辆的稳态侧倾角; 高速转向的结果与之相反, 此时的4WS车辆具有更小的稳态侧倾角, 表明4WS车辆高速工况下的稳定性更好.
3.2 质心位置变化对转向特性的影响
为了分析质心位置对转向特性的影响, 设定质心位置前移、 不变和后移[15], 移动值为0.3 m, 并在低速5 m/s和高速20 m/s进行角阶跃仿真分析, 得到横摆角速度和侧倾角响应曲线, 如图 7 和图 8 所示.
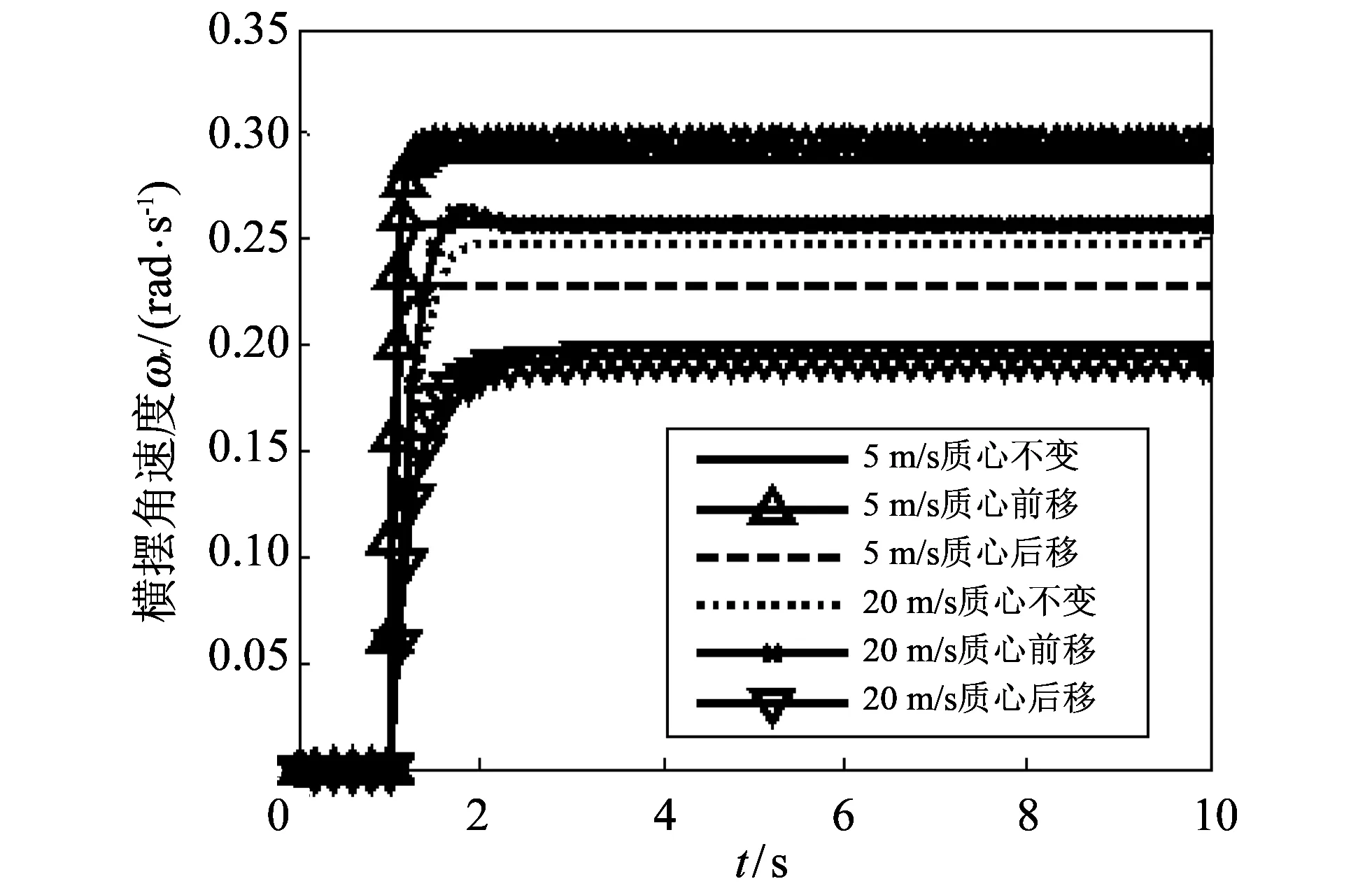
图 7 不同质心位置对应的横摆角速度图Fig.7 The yaw rate of the different centroid position
由图 7 知, 随质心位置的前移, 横摆角速度稳态值增加, 超调量加大, 反应时间延长, 趋向于减小不足转向量; 质心位置后移的结果与之相反. 且质心位置变化0.3m时, 横摆角速度的变化量大约为8.3%~25%.
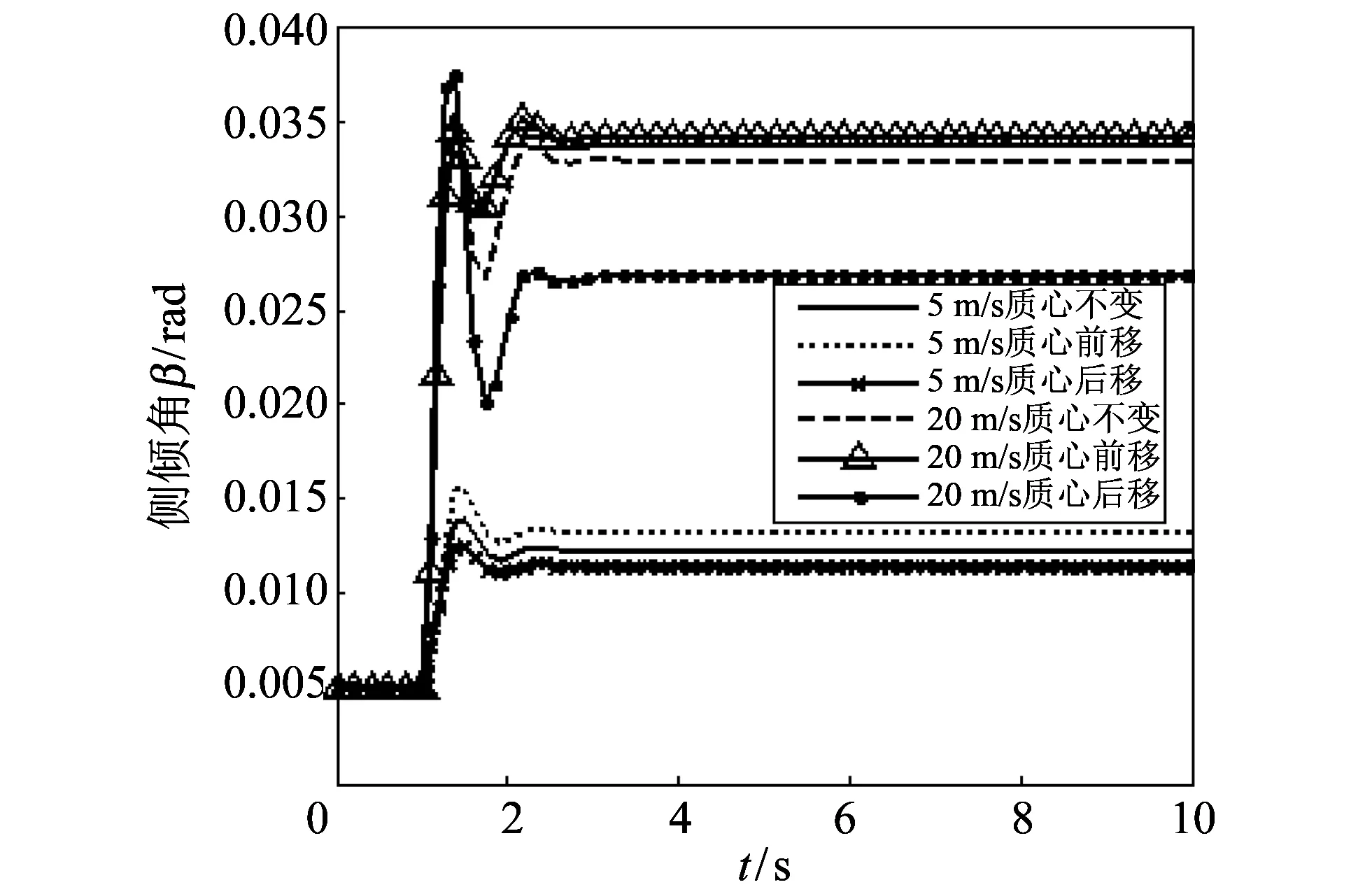
图 8 不同质心位置对应的侧倾角图Fig.8 The roll angle of the different centroid position
由图 8 知, 随着质心位置前移, 4WS车辆的稳态侧倾角加大, 超调量减小, 反应时间缩短, 稳定性变差; 质心后移的结果与之相反. 随车速的增加, 稳态侧倾角增加, 稳定性变差. 且质心位置变化0.3 m时, 侧倾角的变化量大约为7.4%~21.4%.
3.3 簧载质量变化对转向特性的影响
分别设定簧载质量减小、 不变和增加, 改变值为1 000 kg, 并在低速5 m/s和高速20 m/s进行角阶跃仿真分析, 得到横摆角速度和侧倾角响应曲线, 如图 9 和图 10 所示.
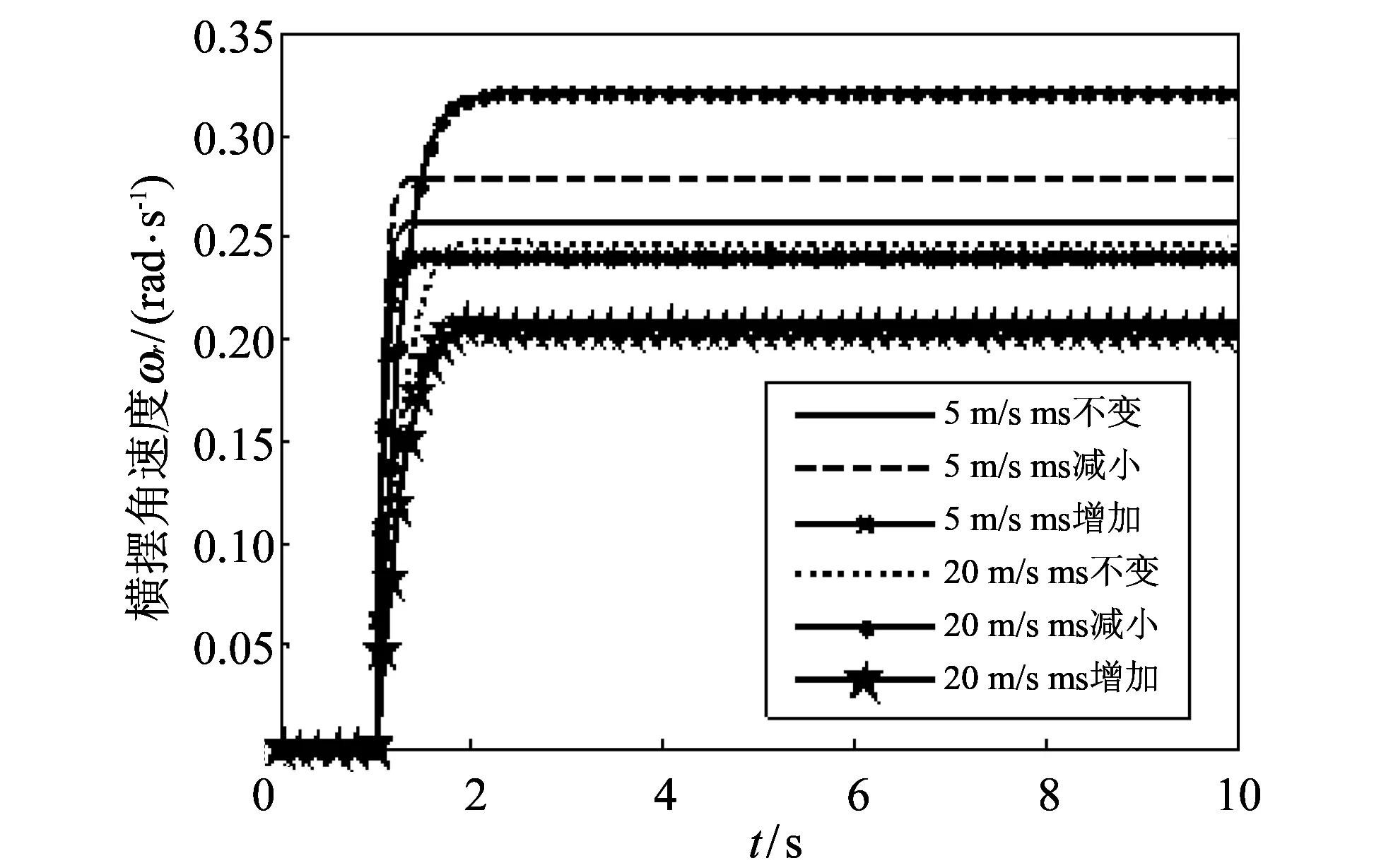
图 9 不同簧载质量对应的横摆角速度图Fig.9 The yaw rate of the different sprung mass
由图 9 知, 随着簧载质量的减小, 横摆角速度稳态值增加, 超调量减小, 反应时间缩短, 车辆不足转向量有减小的趋势; 簧载质量增加的结果与之相反. 且簧载质量变化33%时, 横摆角速度的变化量为4.16%~17.8%.
由图 10 知, 随着簧载质量减小, 4WS车辆的稳态侧倾角减小, 反应时间缩短, 稳定性提高; 簧载质量增加的结果与之相反. 且簧载质量变化33%时, 横摆角速度的变化量为14.3%~28.6%.
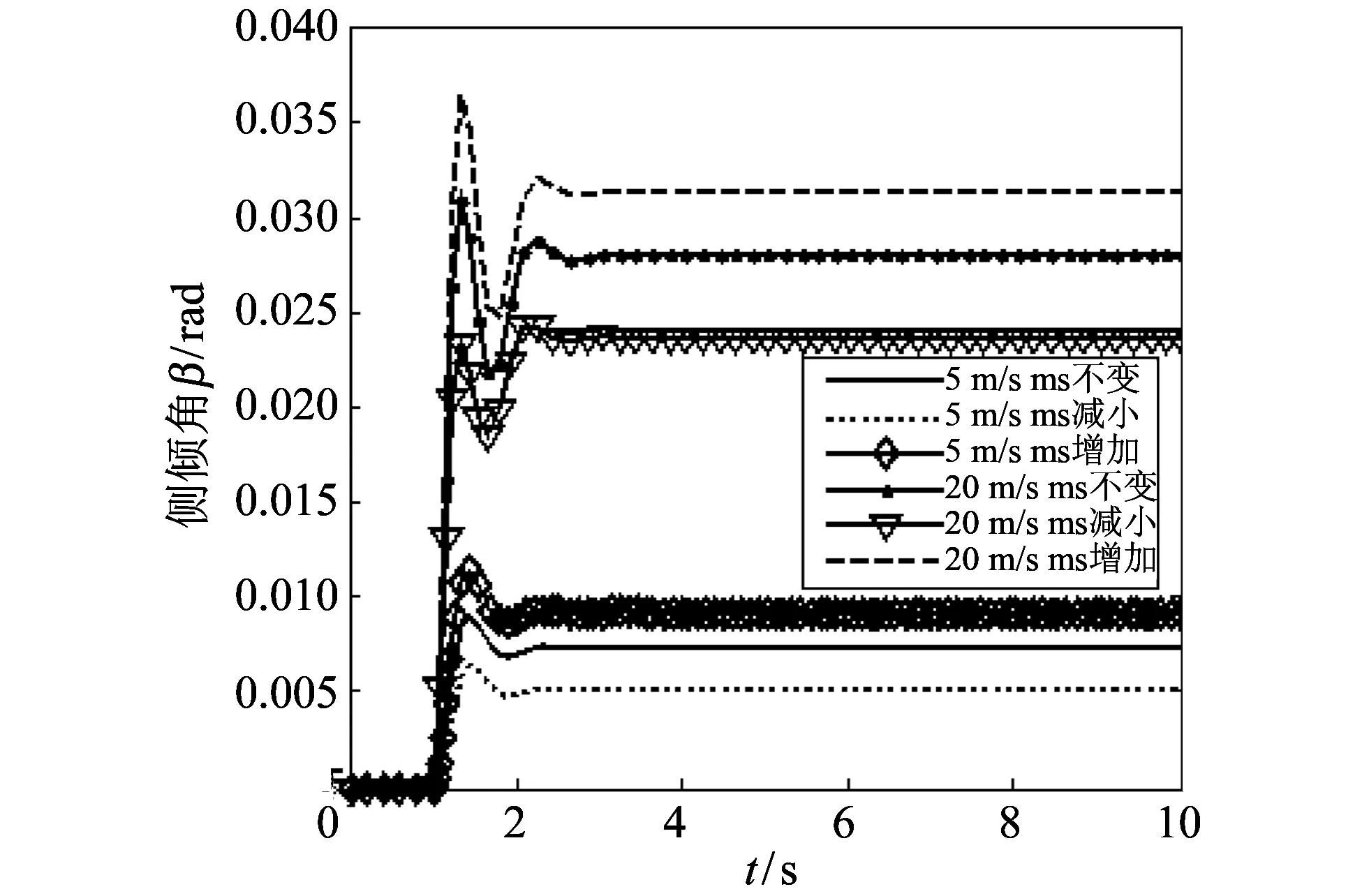
图 10 不同簧载质量对应的侧倾角图Fig.10 The roll angle of different spring mass
3.4 轮胎刚度变化对转向特性的影响
分别将前后轮的轮胎刚度减小、 不变和增加, 改变值为2 kN/rad, 并在低速5 m/s和高速20 m/s 进行角阶跃仿真分析, 得到横摆角速度和侧倾角响应曲线, 如图 11 和图 12 所示.
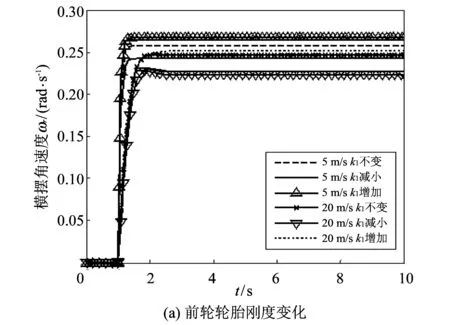
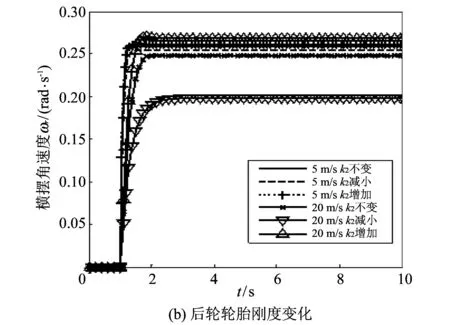
图 11 不同轮胎刚度对应的横摆角速度图Fig.11 The yaw rate of different tire stiffness
由图 11 可知, 低速时, 轮胎刚度对横摆角速度的影响不大; 高速时, 随轮胎刚度的减小, 横摆角速度稳态值减小, 超调量增加, 反应时间延长, 汽车不足转向量有减小趋势; 轮胎刚度增加的结果与之相反. 且轮胎刚度改变值为2 kN/rad时, 横摆角速度的变化量为1.9%~25%.
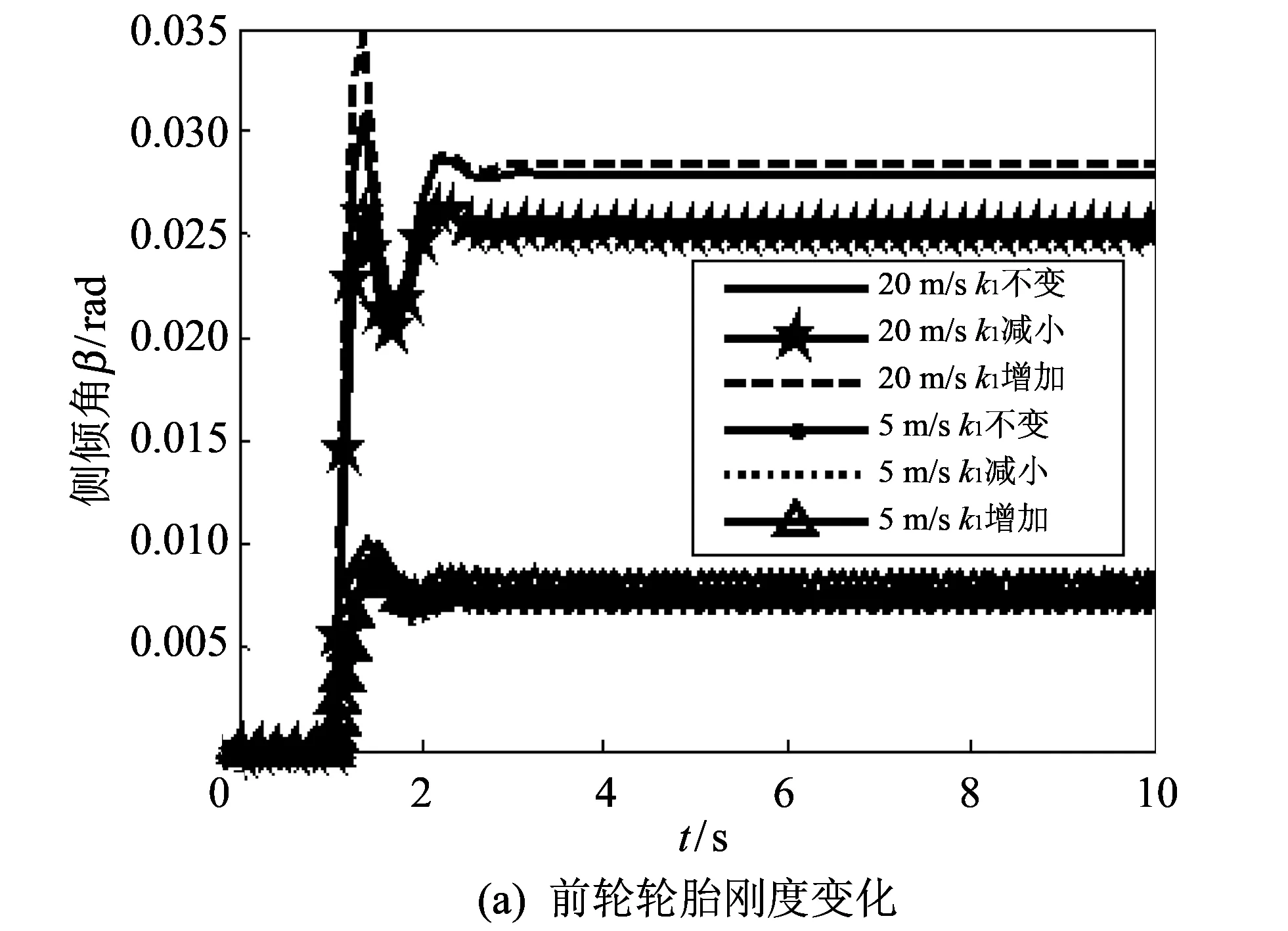

图 12 不同轮胎刚度对应的侧倾角Fig.12 The roll angle of different tire stiffness
由图 12 可知, 低速时, 轮胎刚度对侧倾角的影响不大; 高速时, 随着轮胎刚度减小, 四轮转向车辆的稳态侧倾角减小, 反应时间延长, 稳定性提高; 轮胎刚度增加时的结果与之相反. 且轮胎刚度改变值为2 kN/rad时, 侧倾角的变化量为1.3%~18.5%.
3.5 悬架侧倾角刚度变化对转向特性的影响
将悬架侧倾角刚度减小、 不变和增加, 改变值为4 kN/rad, 并在低速5 m/s和高速20 m/s进行角阶跃仿真分析, 得到横摆角速度和侧倾角响应曲线, 如图 13 和图 14 所示.
由图 13 可知, 悬架侧倾角刚度对4WS车辆横摆角速度几乎没有影响.
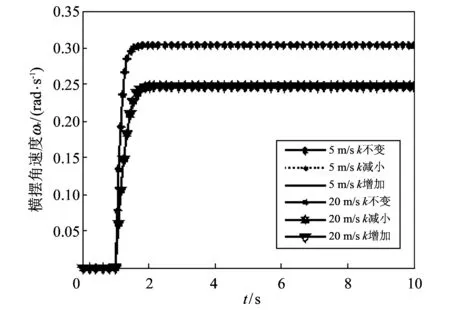
图 13 不同悬架侧倾角刚度对应的横摆角速度Fig.13 The yaw rate of different suspension roll angle stiffness
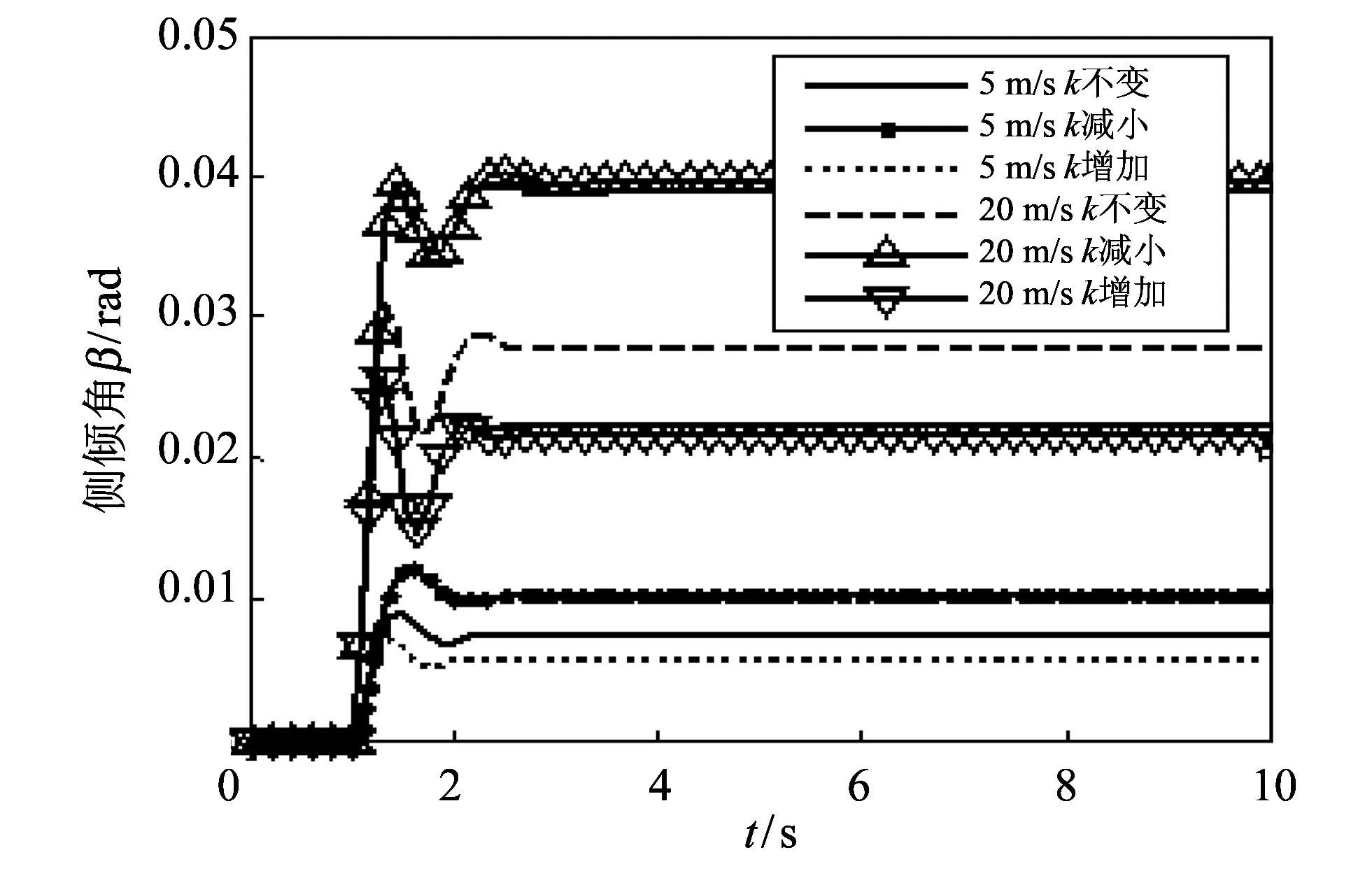
图 14 不同悬架侧倾角刚度对应的侧倾角Fig.14 The roll angle of different suspension roll angle stiffness
由图 14 可知, 随着悬架侧倾角刚度的减小, 稳态侧倾角增加, 超调量加大, 反应时间延长, 稳定性减弱; 悬架侧倾角刚度增加的结果与之相反. 且悬架侧倾角刚度改变值为4 kN/rad时, 侧倾角的变化量为14%~39%.
3.6 簧载质心到侧倾轴的距离变化对转向特性的影响
将簧载质心到侧倾轴的距离减小、 不变和增加, 改变值为0.1 m, 并在低速5 m/s和高速20 m/s 进行角阶跃仿真, 得到横摆角速度和侧倾角响应曲线, 如图 15 和图 16 所示.
由图 15 可知, 侧倾距离对四轮转向车辆横摆角速度的稳态和瞬态响应几乎没有影响.
由图 16 可知, 随着侧倾距离的减小, 稳态侧倾角降低, 最大超调量减小, 反应时间缩短; 侧倾距离增加的结果与之相反. 且簧载质心到侧倾轴的距离改变值为0.1 m时, 侧倾角的变化量为20%~39.2%.
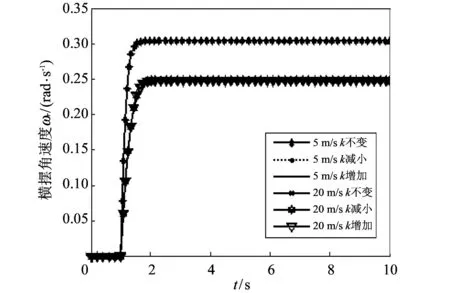
图 15 不同簧载质心到侧倾轴距离对应的横摆角速度Fig.15 The yaw rate of different distance from sprung mass center spring to roll axis
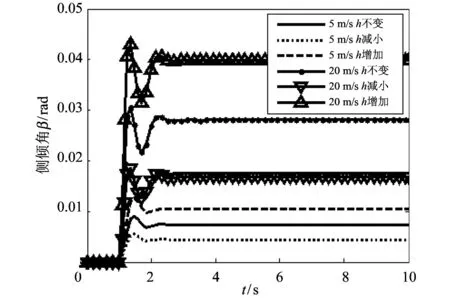
图 16 不同簧载质心到侧倾轴的距离对应的侧倾角Fig.16 The roll angle of different distance from sprung mass center spring to roll axis
3.7 前后侧倾转向系数差的转向特性分析
将前后侧倾转向系数差减小、 不变和增加, 其改变量为0.06, 并在低速5 m/s和高速20 m/s进行角阶跃仿真分析, 得到横摆角速度和侧倾角响应曲线, 如图 17 和图 18 所示.
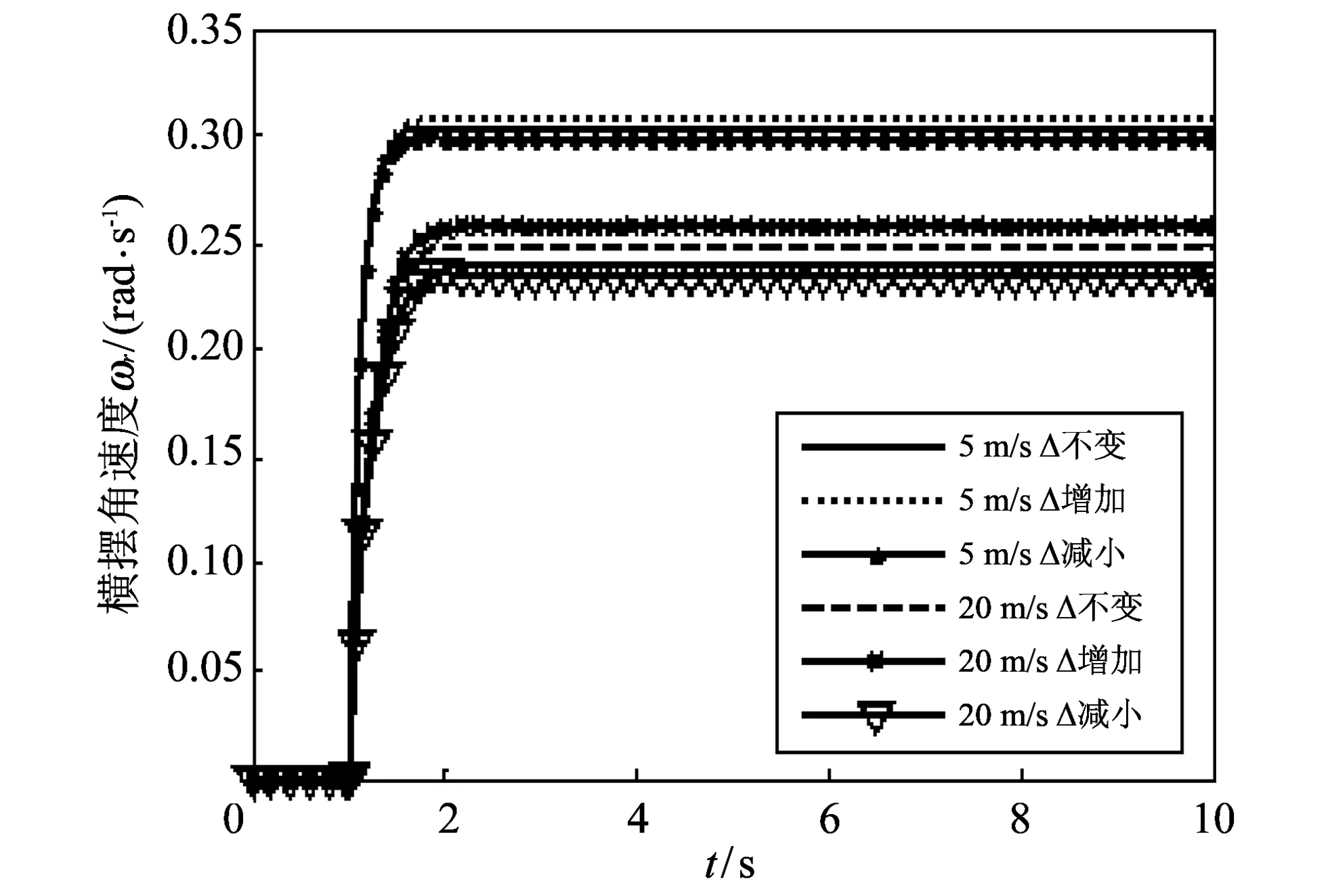
图 17 不同侧倾转向系数差对应的横摆角速度Fig.17 The yaw rate of different roll steer coefficient difference
由图 17 可知, 随着前后侧倾转向系数差值的减小, 稳态横摆角速度值减小, 汽车的不足转向量增加; 悬架前后侧倾转向系数差值增加的结果与之相反. 且前后侧倾转向系数差改变值为0.06时, 横摆角速度的变化量为0.28%~4.2%.
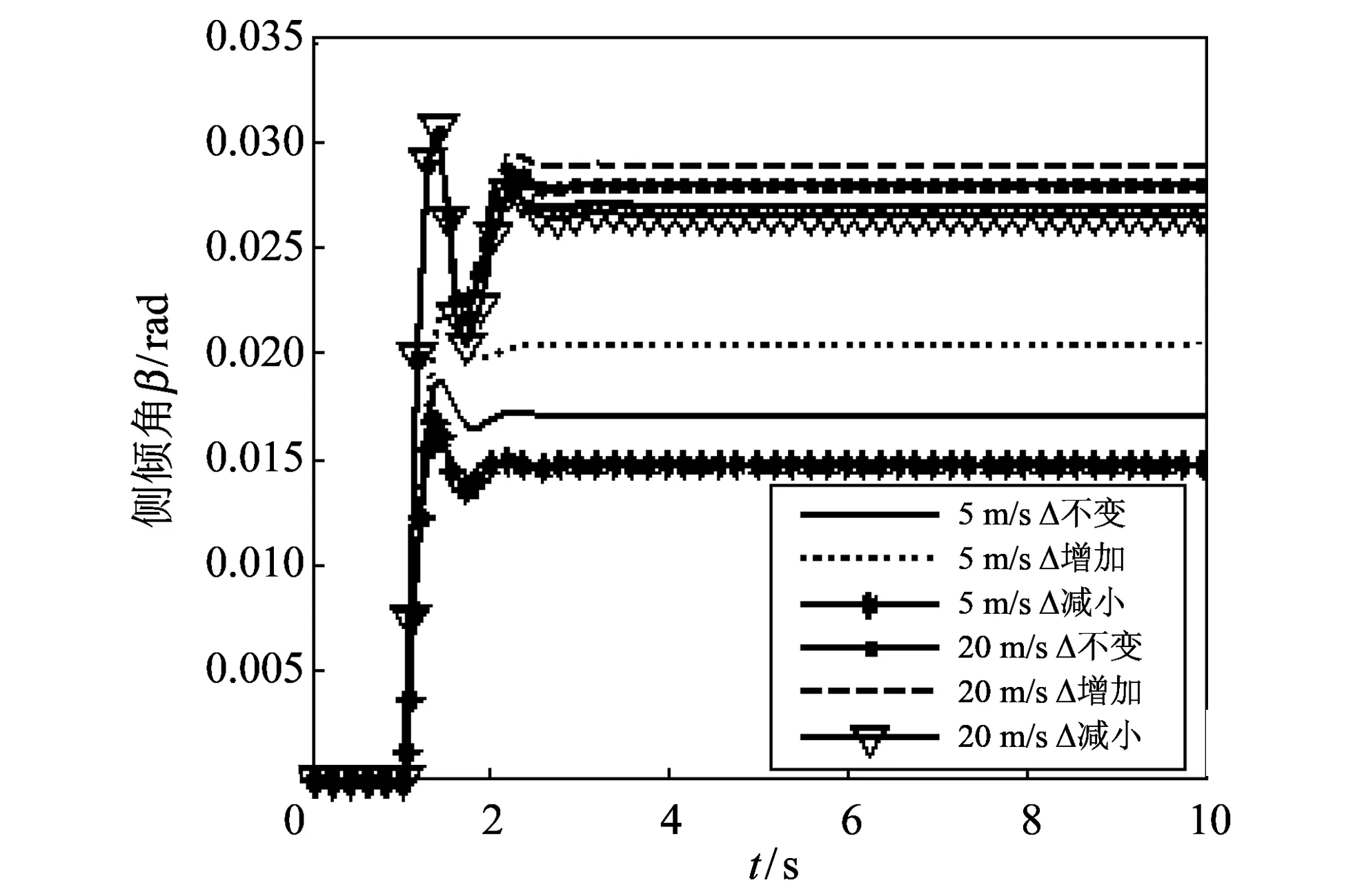
图 18 不同侧倾转向系数差对应的侧倾角Fig.18 The roll angle of different roll steer coefficient difference
由图 18 可知, 随着侧倾转向系数差值的减小, 稳态侧倾角减小, 最大超调量减小, 反应时间延长, 车身侧倾的可能性降低; 悬架前后侧倾转向系数差值增加的结果与之相反. 且前后侧倾转向系数差改变值为0.06时, 侧倾角的变化量为3.7%~17%.
4 结 论
以三自由度4WS汽车模型为基础, 采用稳态质心侧偏角为零为控制策略, 根据阿克曼转向原理, 基于车辆变结构参数, 进行转向盘角阶跃仿真分析, 得到以下结论:
1) 较FWS车辆, 低速行驶的4WS车辆具有更小的转弯半径, 机动性好; 而高速行驶的4WS车辆的不足转向特性趋势增强, 稳定性高.
2) 质心位置的后移, 簧载质量的增加, 轮胎刚度的减小以及前后悬架侧倾转向系数差的增加, 都有助于提高4WS车辆的不足转向特性, 而悬架侧倾角刚度和簧载质心到侧倾轴的距离发生变化时, 几乎不会对4WS车辆的横摆角速度产生影响, 但对4WS车辆的侧倾角的影响较大, 易导致4WS车辆侧翻.
[1]余志生. 汽车理论[M]. 北京: 机械工业出版社, 2009.
[2]吕佳琪. 侧风环境下的乘用车操纵稳定性研究[D]. 长春: 吉林大学, 2015.
[3]喻凡, 林逸. 汽车系统动力学[M]. 北京: 机械工业出版社, 2005.
[4]谭运生, 沈桓, 黄满洪, 等. 基于滑模控制的4WS汽车闭环操纵稳定性研究[J]. 重庆理工大学学报(自然科学版), 2014, 28(11): 12-17. Tan Yunsheng, Shen Huan, Huang Manhong, et al. Closed- loop handling and stability study of four- wheel steering vehicle based on sliding mode control [J]. Chongqing University of Technology (Natural Science Edition), 2014, 28(11): 12-17. (in Chinese)
[5]刘启佳. 四轮转向汽车侧向动力学最优控制和内外环联合控制研究[D]. 北京: 北京理工大学, 2014.
[6]Li Mingxing, Jia Yingmin, Matsuno F. Attenuating diagonal decoupling with robustness for velocity-varying 4WS vehicles[J]. Control Engineering Practice, 2016, 56: 49-59.
[7]于金波. 四轮转向车辆的控制策略研究[D]. 太原: 太原理工大学, 2013.
[8]周佳. 四轮转向系统控制策略对比研究[D]. 北京: 北京理工大学, 2015.
[9]Sano S, Furukawa Y, Shlralshi S. Four wheel steering system with rear wheel steer angle controlled as a function of steering wheel angle[J] . SAE International Congress and Exposition, 1986: 860625.
[10]陶胜飞. 后轮转向机构的运动学和动力学分析[D]. 武汉: 武汉理工大学, 2014.
[11]张辉. 基于主动四轮转向系统的高速汽车侧风稳定性控制研究[D]. 浙江: 浙江大学, 2014.
[12]曾锦锋, 陈晨, 杨蒙爱. 基于阿克曼转向原理的四轮转向机构设计[J]. 轻工机械, 2013, 31(3): 13-16. Zeng Jinfeng, Chen Chen, Yang Mengai. Design of four-wheel steering mechanism based on ackerman steering principle[J]. Light Industry Machinery, 2013, 31(3): 13-16. (in Chinese)
[13]魏冬. 后轮独立控制的四轮转向系统研究[D]. 重庆: 重庆交通大学, 2011.
[14]杨鄂川, 王腾, 张勇, 等. 汽车转向盘角阶跃下的瞬态响应仿真分析与优化[J]. 西南大学学报(自然科学版), 2016, 38(6): 165-171. Yang Echuan, Wang Teng, Zhang Yong, et al. Simulation analysis and optimization of vehicle transient response characteristics under steering angle input[J]. Journal of Southwest University (Natural Science Edition), 2016, 38(6): 165-171. (in Chinese)
[15]胡国强. 汽车四轮转向系统转向特性的研究[D]. 武汉: 武汉理工大学, 2012.
Study on the Steering Characteristics of Four Wheel Steering Vehicle
QIAO Jian-lu, FAN Ying, JIN Min-jie, QIN Wei-xin, JING Hua
(School of Traffic and Logistics, Taiyuan University of Science and Technology, Taiyuan 030024, China)
In order to accurately study steering characteristic of four wheel steering vehicle, a 4WS model with three degrees of freedom is established based on Matlab. On the basis of the model, taking steady-state sideslip angle is zero as the control target to derive the yaw rate gain and the stability factor formula of steering characteristic of 4WS vehicle with three degree of freedom, and analysis the influence of the structural parameters such as centroid position, sprung mass, tire lateral stiffness, roll stiffness of the suspension on steering characteristics. Simulation results show that the center-of-mass position, sprung mass, tire stiffness, and the difference of the front and rear suspension roll steering coefficients all have a significant effect on the steering characteristics of the 4WS vehicle. Other vehicle structural factors will have little impact on the steering characteristics of the 4WS vehicle.
four wheel steering; steering characteristics; three degrees of freedom
1673-3193(2017)04-0458-08
2016-11-16
山西省太原科技大学研究生科技创新项目; 山西省创新教研项目
乔建璐(1993-), 女, 硕士生, 主要从事载运工具的研究.
U461.6
A
10.3969/j.issn.1673-3193.2017.04.011
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
天津教育·下(2018年9期)2018-07-13 08:25:47
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
航天器工程(2014年5期)2014-03-11 16:35:53
电力自动化设备(2013年11期)2013-09-18 02:55:14
电气电子教学学报(2012年1期)2012-10-12 03:27:48