
两级行星齿轮传动非线性啮合力频率耦合与动态特性研究
2016-01-15 02:58:34刘辉,蔡仲昌,项昌乐
振动与冲击 2015年19期
关键词:非线性
两级行星齿轮传动非线性啮合力频率耦合与动态特性研究
刘辉1,2,蔡仲昌3,项昌乐1,2
(1.北京理工大学机械与车辆学院,北京100081; 2.北京电动车辆协同创新中心,北京100081;3.中国航天三江集团特种车辆技术中心,武汉430023)
摘要:利用拉格朗日方程推导了两级行星齿轮传动的平移-扭转非线性振动模型,模型考虑了齿侧间隙、时变啮合刚度及其相位差、综合啮合误差、行星轮位置角时变性以及各行星排级间连接件的弯曲和扭转刚度。从行星排级间连接轴的力与变形耦合关系出发,研究了两个行星排啮合力产生的啮合频率耦合现象。通过数值仿真对不同激励条件下啮合频率耦合的表现形式进行了研究,对不同行星排的动载系数、均载系数、连接轴转矩的动态特性进行了分析,为多级行星齿轮传动系统动力学分析与设计提供指导。
关键词:行星齿轮传动;非线性;啮合力;啮频耦合;动载系数;均载系数
中图分类号:TH132.41; TB123
文献标志码:A
DOI:10.13465/j.cnki.jvs.2015.19.003
Abstract:Based on Lagrange’s equation, the translational-torsional coupled nonlinear dynamic model of two stage planetary gears was established considering backlash, time-varying mesh stiffness and its phase difference, gear mesh composite errors, time-varying planet wheel position angle, and torsional and bending stiffnesses of connectors among different stages. According to the relationship among torques of connection shafts and vibration displacements of parts, the meshing frequency coupling phenomenon of mesh force for different stages was studied. Under different excitation conditions, the forms of meshing frequency coupling were analyzed. At the same time, the dynamic load coefficient and the load sharing coefficient of meshing force for different stages, and the dynamic characteristics of torques of connection shafts were calculated. The results provided a reference for design and dynamic analysis of multi-stage planetary gears.
基金项目:国家自然科学基金(11232003, 91315302); 国家基础性发展规划项目(2010CB832704); 国家高技术研究发展计划(2012AA050901)资助; 教育部博士点基金(20130041110050)
收稿日期:2014-06-30修改稿收到日期:2014-10-17
Frequency coupling and dynamic characteristics of nonlinear meshing force for two-stage planetary gears
LIUHui1,2,CAIZhong-chang3,XIANGChang-le1,2(1. School of Mechanical and Engineering, Beijing Institute of Technology, Beijing 100081, China;2. Collaborative Innovation Center of Electric Vehicles in Beijing, Beijing 100081, China;3. Special Vehicle Technology Center of China Space Sanjiang Group, Wuhan 430023, China)
Key words:planetary gears; nonlinear; meshing force; meshing frequency coupling; dynamic load coefficient; load sharing coefficient
多级行星齿轮传动在车辆、船舶、航空、风力发电、工程机械等各种工业领域的传动系统中得到了广泛应用。在动态条件下,当动力在各级行星排中传递时,振动也在不同行星排、不同部件之间传递并相互影响,造成各行星排之间动力学的耦合。目前研究以单级行星齿轮传动为主,多级行星齿轮传动振动特性研究尚不够深入,分析行星排级间耦合原因和表现形式是研究多级行星齿轮传动振动特性区别于单级行星传动的一个重要内容。
近几十年来,国内外学者对多级行星齿轮动力学开展了许多有益的研究。Kahraman[1]建立了用于功率流分析的行星传动系统转速转矩分析模型。Deur等[2]建立了包含离合器摩滑过程控制模型的某车辆行星传动系统动力学模型。Kiracofer[3]、Kahraman[4]、Guo[5-6]、李瑰贤[7]、蔡仲昌[8]各自针对不同形式的多级行星传动对固有振动的建模方法、振动模式特点、参数灵敏度特性进行了研究。Inalpolat等[9-10]在线性振动范围内分析了车辆多级行星传动在不同挡位下的共振转速和振幅响应。秦大同等[11-12]研究了盾构机三级行星齿轮减速器在外部激励作用下构件振动位移和动态啮合力的动态响应和频谱特性。Al-shyyab等[13]采用一种改进的谐波平衡法推导了两级行星齿轮传动纯扭模型的半解析解,并研究了系统非线性响应特性。朱自冰等[14]研究了两级星型齿轮传动的非线性振动响应以及分岔、混沌特性。孙智民等[15]研究了两级轮系组成的封闭行星齿轮传动的啮合力动载荷特性和中心轮浮动轨迹。刘辉等[16-17]建立了多间隙、多时变参数的单级行星传动非线性动力学模型,研究了其在不同外界激励条件下啮合力、扭振角位移的频谱特性。目前有关多级行星齿轮传动的动力学研究以振动响应特性为主,对行星排之间动力学耦合特性的研究还不够深入。
本文以两级受载行星传动非线性振动模型为基础,分析了两个受载行星排之间啮合力在频域内产生耦合的原因,对定值驱动转矩和单频时变驱动转矩作用下两个行星排的啮合力进行了频谱特性分析,研究了啮合频率耦合现象的各种存在形式。对不同行星排啮合力的动载特性、均载特性、连接轴转矩动态特性进行了分析,为车辆行星齿轮传动动态性能分析与设计提供了参考。
1动力学建模
1.1模型描述与假设
本文研究对象是车辆自动变速箱中常用的一种两级行星传动,其结构简图见图1。系统有两个普通行星排,每个行星排包含四个行星轮,动力从一排太阳轮轴输入,从二排行星架输出。当一排齿圈制动时,两个行星排都处于受载状态。

图1 行星传动简图 Fig.1 Sketch map of planetary transmission
本文采用以统一固定参考系为基准的方法描述各部件振动位移。对于中心旋转部件,直接采用固定参考系下的绝对位移描述其平移运动和旋转运动;对于行星轮,其固定参考系中的绝对运动分解为与行星架同步运动的动坐标系的牵连运动和相对于该动坐标系的相对运动的矢量和。该描述方法在一个统一的固定参考系中进行动力学分析,避免了不同旋转参考系间的坐标转换。
本文采用集中参数法建模,采用如下假设:
(1)轴承刚度、制动件切向支承刚度、行星排连接件刚度均为线性,行星排连接件具有扭转和弯曲弹性,齿轮本体、行星架、行星轮轴为刚体;
(2)忽略啮合线方向由于齿轮轴系振动引起的瞬态变化,啮合力的方向始终沿着啮合线方向;
(3)每个部件有三个自由度,分别是在垂直于自身旋转轴线的平面内的平移振动和绕自身旋转轴线的扭转振动;
(4)各行星轮沿行星架圆周方向均匀分布,其质量、惯量、误差、支撑刚度等参数均相同;
(5)系统阻尼与部件的相对运动速度成正比。
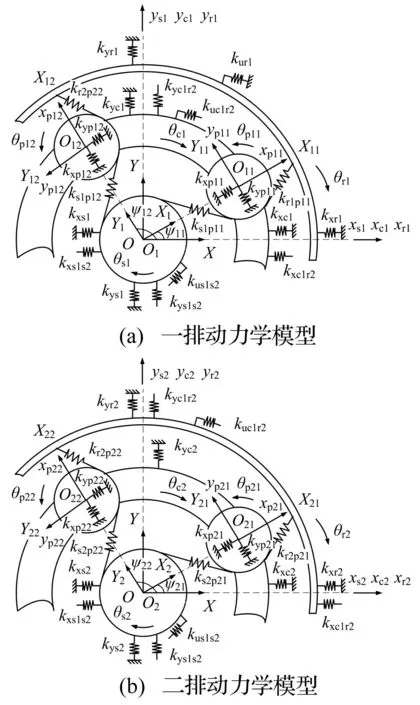
图2 两级行星齿轮传动动力学模型 Fig.2 The dynamic model of two stage planetary transmission
两级行星传动中各行星排的集中参数模型如图2所示。图中OXY为系统公用的固定坐标系,OiXiYi为第i级行星排自己的旋转坐标系,OijXijYij为第i级行星排中第j个行星轮的坐标系。下标si、ri、ci、pij分别为第i级太阳轮、齿圈、行星架以及第i级中第j个行星轮。xa、ya、θa分别为部件a在各自相关坐标系中沿横、纵坐标轴的微小平移位移以及绕该坐标原点旋转轴的微小角位移,a=si、ri、ci、pij。太阳轮、齿圈、行星架的微小振动位移是相对固定参考系的绝对运动量,行星轮的微小振动位移是相对行星架旋转参考系的相对运动量。ksipij、csipij、bsipij分别为第i级行星排中太阳轮和第j个行星轮之间轮齿的时变啮合刚度、啮合阻尼、齿侧间隙一半,kripij、cripij、bripij的含义与此类似,不再赘述。kur1为第1级齿圈沿旋转方向的切向支承刚度,kxa、kya为各部件在各自坐标系中沿横、纵坐标轴的轴承支承刚度,kxhiql、kyhiql、kuhiql为第i级行星排中部件h与第l级行星排中部件q的连接件的弯曲刚度和扭转刚度,i、l为整数,i≠l;h、q=s,r,c。ψij为第i级行星排中第j个行星轮在固定坐标系中的位置角,ψij=ωcit+2π(j-1)/n,n为第i级中行星轮个数。Ja、ma、Ra分别为部件a的转动惯量、质量、等效半径。α为压力角。
综合啮合误差是随时间变化的函数,由制造误差、安装误差、齿形误差组成。各误差在内、外啮合线上产生的当量累积啮合误差为
(1)
式中:Ea、Aa分别为各部件制造误差幅值、安装误差幅值,Esipij、Eripij分别为各啮合副的齿形误差幅值,ωa分别为各部件理论角速度,ωmi、Ti分别为第i级行星排的啮合频率、啮合周期,βa、γa分别为各误差的相位角,γsipij、γripij为各行星轮外、内啮合副之间的啮合相位差,γsri为同一个行星轮上外啮合副与内啮合副之间的啮合相位差,t为时间。
时变啮合刚度通常假设为周期矩形波,它们之间的相位差计算方法见文献[18]。将时变啮合刚度展成Fourier级数,取六次谐波项时其表达式为
(2)

啮合阻尼较为复杂,其影响因素很多,不易准确求得,本文采用的啮合阻尼经验公式为
(3)
式中:ma为各齿轮等效质量,ζ为阻尼比,取为0.07。
齿侧间隙是轮齿啮合力描述中的强非线性项,齿侧间隙非线性函数f的表达式为
(4)
式中:Lsipij为啮合线变形量,bsipij为单边齿侧间隙。内啮合情况与此类似。
各外、内啮合线变形量Lsipij、Lripij包括各部件扭转振动、平移振动引起的线位移变形量和综合啮合误差引起的等效变形量,其表达式为
(5)
式中:Ra为各部件的等效半径。
第i级行星排第j个行星轮与太阳轮、齿圈在各自啮合线上的啮合力Fsipij、Fripij分别为
(6)
各部件的轴承支反力Fxa、Fya为
(7)
一排太阳轮与二排太阳轮连接轴的扭转转矩Ts1s2和弯曲平面内的横向力Fxs1s2、Fys1s2为
(8)
一排行星架与二排齿圈连接轴的扭转转矩Tc1r2和弯曲平面内的横向力Fxc1r2、Fyc1r2为
(9)
发动机波动转矩是车辆行星传动的动力来源,本文中发动机为V型12缸4冲程柴油机,通过简谐分析得出主要谐次[17],为对比分析发动机转矩波动对系统响应的影响,将驱动转矩划分为定值驱动转矩、单频时变驱动转矩两种,其表达式分别为
Tin=T0
(10)
Tin=T0+μT0sin(2πfet+φe)
(11)
式中:T0为发动机输出转矩平均值,fe为发动机波动转矩频率,取为曲轴6倍转频,φ为波动转矩的初始相位,μ为波动转矩幅值与平均值之比,取0.3。
本文采用定步长四阶Runge-Kutta法求解系统非线性方程组的数值解,系统主要参数如表1~表3所示。

表1 两级行星传动系统主要参数

表2 两级行星传动系统啮合刚度和齿形制造误差

表3 两级行星传动系统弯曲刚度和扭转刚度
1.3动力学模型
将非线性啮合力和输入轴驱动转矩视为广义作用力,根据Lagrange方程,推导得系统各部件的动力学方程见式(12)至式(19)。
一排太阳轮的振动微分方程为
Fxs1+Fbxs1s2=0
(12a)
Fys1+Fbys1s2=0
(12b)
(12c)
一排齿圈的振动微分方程为
(13a)
(13b)
(13c)
式中:Tur1为第一排齿圈所受到的制动转矩。
一排行星架的振动微分方程为
(14a)
(14b)
一排行星轮的振动微分方程为
sinαFr1p1j+Fxp1j=0
(15a)
cosαFr1p1j+Fyp1j=0
(15b)
(15c)
二排太阳轮的振动微分方程为
Fxs2-Fbxs1s2=0
(16a)
Fys2-Fbys1s2=0
(16b)
(16c)
二排齿圈的振动微分方程为
Fxr2-Fbxc1r2=0
(17a)
Fyr2-Fbyc1r2=0
(17b)
(17c)
二排行星架的振动微分方程为
(18a)
(18b)
(18c)
二排行星轮的振动微分方程为
(19a)
(19b)
(19c)
2两级行星排啮合力特性分析
2.1不同行星排啮合力频率耦合成因
本文以一排太阳轮与二排太阳轮连接轴为例,从连接轴内力与变形耦合关系出发,说明两个行星排啮合力产生啮合频率耦合现象的原因,其耦合过程示意图见图3。图中实线箭头为耦合前的啮合频率传递方向,虚线表示耦合后增加的啮合频率传递方向。连接轴两端的太阳轮具有各自不同的振动频率,包括各自转频、行星排啮频、外激励频率以及它们的倍频。连接轴的扭转内力、弯曲内力分别把不同频率的振动位移耦合到一起,再以作用力与反作用力的形式分别作用到两个被连接部件上。耦合后的被连接部件将含有新频率的振动位移以等效啮合线变形量的形式反馈回该级行星排啮合力,从而造成不同级行星排啮合力之间的相互耦合。本文将不同行星排啮频及其相关频率同时出现在啮合力中的耦合振动称为双啮频耦合振动现象,相对于本级行星排啮频而“新”出现的其它级行星排啮频称为耦合啮频。

图3 啮合力频率耦合过程示意图 Fig.3 Schematic diagram of meshing force frequency coupling process
2.2定值驱动转矩时啮合力频谱
T0=500N·m的定值驱动转矩下啮合力频谱瀑布图见图4。与单级行星排啮合力的最大区别是,在一排啮合力频谱图中出现了两个二排啮频:fm2和2fm2,而在二排啮合力频谱图中一排啮频却只出现在一部分转速中,说明不同行星排啮合力之间的啮频耦合关系并不是对等的,其产生的影响是强弱不同的。本文中每个行星排有四个外啮合力和四个内啮合力,从计算结果可以看出,不仅四个外(内)啮合力的频谱是相似的,而且内、外啮合力的频谱也是相似的。本文以各级行星排第一个行星轮的外啮合力为例作分析,其他啮合力的情况类似,限于篇幅不再赘述。

图4 T 0=500N·m时定值驱动转矩下啮合力频谱瀑布图 Fig.4 The meshing force spectrum waterfall chart under the action of constant torque T 0=500N·m
部分转速下的啮合力频谱见图5和图6。在一排啮合力频谱中,二排啮频的存在形式较复杂,主要有倍频、分数频、倍频与转频的调制边频、以及二排啮频与一排啮频的组合频率,在5000r/min时存在诸如μfm1+4(fm1-fm2),μ=2,8,10,这样的复杂组合形式。在二排啮合力频谱中,3000r/min和4000r/min时没有出现一排啮频,5000r/min时才出现两个一排啮频:2fm1和3fm1,说明转速升高引起频率耦合作用增强。

图5 T 0=500N·m的定值驱动转矩下不同转速的一排啮合力频谱图 Fig.5 The meshing force spectrum of the first planetary under the action of constant torque T 0=500N·m and different rotating speed

图6 T 0=500N·m的定值驱动转矩下不同转速的二排啮合力频谱图 Fig.6 The meshing force spectrum of the second planetary under the action of constant torque T 0=500N·m and different rotating speed
T0=2000N·m的定值驱动转矩下啮合力频谱瀑布图见图7。与T0=500N·m时的区别是在一排啮合力频谱中出现了更高谐次的二排啮频:4fm2,在二排啮合力频谱中新增了两个一排啮频:2fm1和4fm1,说明载荷增大也会导致频率耦合作用增强。
部分转速下的啮合力频谱见图8和图9。与T0=500N·m时相比,耦合啮频的存在形式相对简单,但出现了更高谐次的耦合啮频,如8倍频和10倍频。不同啮频的组合形式也发生改变,μ(fm1+fm2),μ=2,3,成为主要组合形式。

图7 T 0=2000N·m时定值驱动转矩下啮合力频谱瀑布图 Fig.7 The meshing force spectrum waterfall chart under the action of constant torque T 0=2000N·m

图8 T 0=2000N·m的定值驱动转矩下不同转速的一排啮合力频谱图 Fig.8 The meshing force spectrum of the first planetary under the action of constant torque T 0=2000N·m and different rotating speed

图9 T 0=2000N·m的定值驱动转矩下不同转速的二排啮合力频谱图 Fig.9 The meshing force spectrum of the second planetary under the action of constant torque T 0=2000N·m and different rotating speed
2.3单频时变驱动转矩时啮合力频谱
T0=500N·m的单频时变驱动转矩下啮合力频谱瀑布图见图10。与定值驱动转矩时的主要区别是在一排、二排啮合力频谱中都没有明确地出现耦合啮频的轨线。当时变驱动转矩平均值较小时,外激励频率和本级行星排啮频是啮合力的主要频率,耦合啮频的影响是次要的。
T0=500N·m的单频时变驱动转矩下部分转速的啮合力频谱图见图11和图12。与定值驱动转矩时的主要区别是,在一排、二排啮合力频谱中耦合啮频零星分布,其作用十分有限。外激励频率分别与不同行星排啮频、各部件转频发生调制关系。由于二排同时从太阳轮和齿圈输入动力,且它们都是一排非线性啮合力作用后的结果,所以其频谱中存在更高谐次啮频和外激励频率的调制频率。
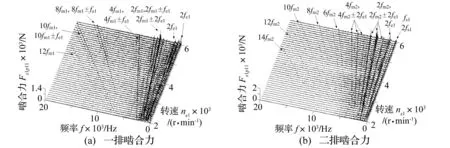
图10 T 0=500N·m时单频时变驱动转矩下啮合力频谱瀑布图 Fig.10 The meshing force spectrum waterfall chart under the action of single frequency time-varying torque T 0=500N·m

图11 T 0=500N·m的时变驱动转矩下不同转速的一排啮合力频谱图 Fig.11 The meshing force spectrum of the first planetary under the action of time-varying torque T 0=500N·m and different rotating speed

图12 T 0=500N·m的时变驱动转矩下不同转速的二排啮合力频谱图 Fig.12 The meshing force spectrum of the second planetary under the action of time-varying torque T 0=500N·m and different rotating speed
T0=2000N·m的单频时变驱动转矩下啮合力频谱瀑布图见图13。与T0=500N·m时的区别是在一排、二排啮合力频谱中不仅明确地出现耦合啮频、不同啮频的组合频率,还有耦合啮频与外激励频率的调制频率。这说明时变驱动转矩平均值增大时,啮合力频谱出现了新的耦合形式,不仅不同行星排啮频的耦合作用增强,而且各啮频与外激励频率的调制作用也增强。
部分转速下的啮合力频谱见图14和图15。在一排啮合力频谱中出现了2(fm1+fm2)形式的组合频率,2fm2±2fe1、2fm2±2fc1形式的调制频率。在二排啮合力频谱中,耦合频率形式则以μfm1,μ=2,3,4,为主要。这说明啮频耦合作用对一排啮合力的影响大于对二排啮合力。
通过以上在定值驱动转矩、时变驱动转矩不同工况下的啮合力频谱分析可以看出,耦合后啮合力除了本级行星排各部件的转频与啮频之外,还出现四种新频率:非本级行星排啮频、两个行星排啮频的组合频率、非本级行星排啮频与本级行星排部件转频的调制频率、非本级行星排啮频与外激励频率的调制频率。
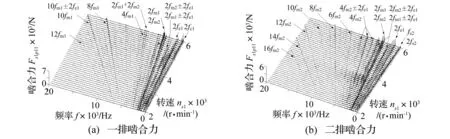
图13 T 0=2000N·m时单频时变驱动转矩下啮合力频谱瀑布图 Fig.13 The meshing force spectrum waterfall chart under the action of single frequency time-varying torque T 0=2000N·m

图14 T 0=2000N·m的时变驱动转矩下不同转速的一排啮合力频谱图 Fig.14 The meshing force spectrum of the first planetary under the action of time-varying torque T 0=2000N·m and different rotating speed

图15 T 0=2000N·m的时变驱动转矩下不同转速的二排啮合力频谱图 Fig.15 The meshing force spectrum of the second planetary under the action of time-varying torque T 0=2000N·m and different rotating speed
2.4动载特性与均载特性
在多级行星齿轮传动中,不仅啮合状态不同会造成同一级行星排的多个外、内啮合力之间存在差异,而且各连接轴质量、刚度特性的不同也会形成每一级行星排啮合力不同的动态特性。本文采用动载系数和均载系数评价啮合力的动态特性。
外啮合力动载系数Gsipij定义为
(20)

不同行星排连接轴的动载系数Thiql定义为
(21)

外啮合力的均载系数Bsipij定义为
(22)
内啮合力的均载系数与外啮合力的定义类似。
本文将一排啮合力Fs1p11、二排啮合力Fs2p21、一排太阳轮与二排太阳轮连接轴扭矩Ts1s2、一排行星架与二排齿圈连接轴扭矩Tc1r2的动态特性进行对比分析。不同定值驱动转矩下各啮合力、转矩的动载系数见图16和图17,可以看出,动载系数从大到小依次是:一排啮合力,二排啮合力,一排行星架与二排齿圈连接轴,
一排太阳轮与二排太阳轮连接轴。在两个行星排中,内啮合动载系数大于外啮合。从整体看,在T0=500N·m时的系统动载系数大于T0=2000N·m时。在T0=500N·m时,各啮合力在ns1=3000r/min出现共振,从ns1=4000r/min开始随转速升高有增大趋势;而连接轴转矩在ns1=3700r/min时出现共振。在T0=2000N·m时,各啮合力和扭矩同时发生共振,共振转速为ns1=3800r/min,共振最明显的是一排行星架与二排齿圈连接轴的扭转转矩。


图16 T0=500N·m的定值驱动转矩下系统动载系数Fig.16ThedynamicloadcoefficientundertheactionofconstanttorqueT0=500N·m图17 T0=2000N·m的定值驱动转矩下系统动载系数Fig.17ThedynamicloadcoefficientundertheactionofconstanttorqueT0=2000N·m图18 T0=500N·m的定值驱动转矩下啮合力均载系数Fig.18ThemeshingforceaverageloadcoefficientundertheactionofconstanttorqueT0=500N·m
不同定值驱动转矩下啮合力均载系数见图18和图19,可以看出,二排啮合力均载系数大于一排啮合力。各行星排的内、外啮合力均载系数变换趋势基本一致。在T0=2000N·m时的系统均载系数小于T0=500N·m时的均载系数。驱动转矩平均值增大有利于改善行星轮载荷分配情况。在T0=500N·m时,一排啮合力均载系数在ns1为2900r/min和3700r/min时出现峰值。在T0=2000N·m时,一、二排啮合力均载系数在ns1为3500r/min和4000r/min时出现峰值。
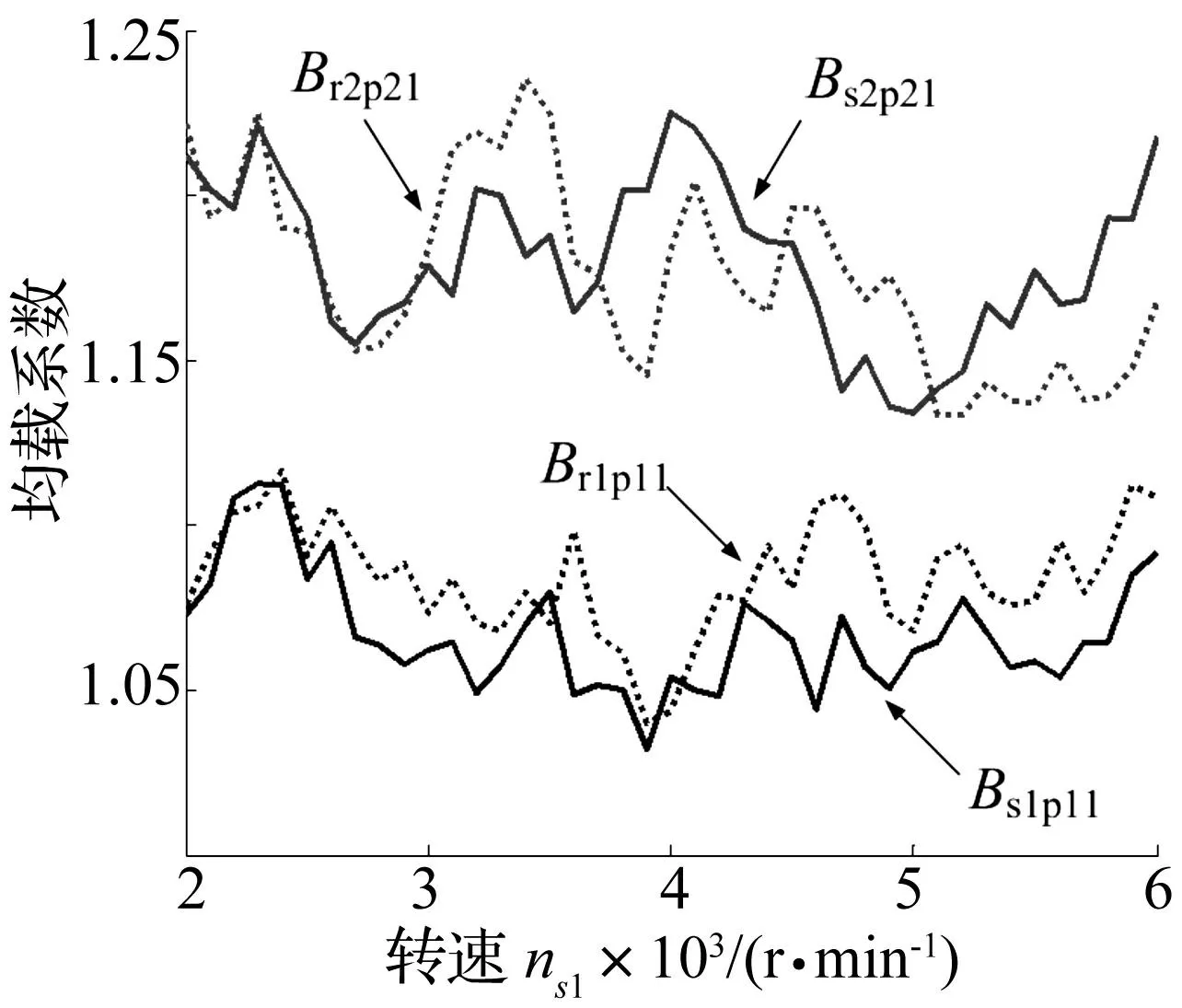
图19 T 0=2000N·m的定值驱动转矩下 啮合力均载系数 Fig.19 The meshing force average load coefficient under the action of constant torque T 0=2000N·m
3结论
本文考虑齿侧间隙、时变啮合刚度及其相位差、制造误差、安装误差、行星轮位置角时变性以及各行星排级间连接件的弯曲和扭转刚度,在统一的固定参考系中建立了两级行星齿轮传动的平移-扭转非线性振动模型。
以一排太阳轮与二排太阳轮连接轴为例,从连接轴内力与变形耦合关系出发,阐述了两个行星排啮合力产生啮合频率耦合的过程。解释了不同行星排啮频及其相关频率同时出现在啮合力频谱中的双啮频耦合振动现象。
通过数值方法计算了两级行星排在不同形式驱动转矩作用下的动态啮合力。从频谱分析看出,啮合频率耦合的表现形式与外激励条件有密切关系。时变驱动转矩作用时的耦合频率表现形式比定值驱动转矩时的更加复杂。转速升高、平均载荷增大都会引起频率耦合作用增强。耦合后的啮合力除了本级行星排各部件的转频与啮频之外,还出现了四种新频率:非本级行星排啮频、两个行星排啮频的组合频率、非本级行星排啮频与本级行星排部件转频的调制频率、非本级行星排啮频与外激励频率的调制频率。同时,啮频耦合产生的影响对各级行星排啮合力频谱并不是对等的,其对一排啮合力的影响大于对二排。
对各行星排啮合力、连接轴转矩的动态特性进行了分析。动载系数从大到小依次是:一排啮合力,二排啮合力,一排行星架与二排齿圈连接轴,一排太阳轮与二排太阳轮连接轴。而二排啮合力均载系数大于一排啮合力均载系数。
参考文献
[1]Kahraman A. A kinematics and power flow analysis methodology for automatic transmission planetary gear trains [J]. Journal of Mechanical Design, 2004, 126(6): 1071-1081.
[2]Deur J, Asgari J, Hrovat D, et al. Modeling and analysis of automatic transmission engagement dynamics-linear case [J]. Journal of Dynamic Systems, Measurement, and Control, 2006, 128: 263- 277.
[3]Kiracofe D R, Parker R G. Structured vibration modes of general compound planetary gear systems [J]. Journal of Vibration and Acoustics, 2007, 129:1-16.
[4]Kahraman A. Free torsional vibration characteristics of compound planetary gear sets[J]. Mechanism and Machine Theory, 2001, 36(6): 953-971.
[5]Guo Yi-chao, Parker R G. Purely rotational model and vibration modes of compound planetary gears[J]. Mechanism and Machine Theory, 2010, 45: 365-377.
[6]Guo Yi-chao, Parker R G. Sensitivity of general compound planetary gear natural frequencies and vibration modes to model parameters[J]. Journal of Vibration and Acoustics 2010, 132(1)011006.
[7]李瑰贤,赵永强,常山,等. 船用两级双排斜齿行星齿轮系统动力学方程的建立[J]. 船舶力学,2011,15(5):530-537.
LI Gui-xian, ZHAO Yong-qiang, CHANG Shan, et al. Study on dynamic governing equations of two stage double helical tooth planetary gear train used in ship[J]. Journal of Ship Mechanics, 2011, 15(5): 530-537.
[8]蔡仲昌,刘辉,项昌乐,等. 车辆行星传动系统扭转振动固有特性及灵敏度分析[J]. 中国机械工程,2011,22(1):96-101.
CAI Zhong-chang, LIU Hui, XIANG Chang-le, et al. Research on natural characteristics and sensitivity for torsional vibration of a vehicle multistage planetary gears[J]. China Mechanical Engineering, 2011, 22(1): 96-101.
[9]Inalpolat M, Kahraman A. Dynamic modelling of planetary gears of automatic transmissions[J]. Multi-body Dynamics, 2008, 138(222): 229-242.
[10]蔡仲昌,刘辉,项昌乐,等. 车辆多级行星传动系统强迫扭转振动与动载特性[J]. 吉林大学学报:工学版,2012,42(1):19-26.
CAI Zhong-chang, LIU Hui, XIANG Chang-le, et al. Characteristics of forced torsional vibration and dynamic load for vehicle multistage planetary transmission[J]. Journal of Jilin University:Engineering and Technology Edition, 2012, 42(1): 19-26.
[11]秦大同,肖正明,王建宏. 基于啮合相位分析的盾构机减速器多级行星齿轮传动动力学特性[J]. 机械工程学报,2011,47(23):20-29.
QIN Da-tong, XIAO Zheng-ming, WANG Jian-hong. Dynamic characteristics of multi-stage planetary gears of shield tunnelling machine based on planet mesh phasing analysis[J]. Journal of Mechanical Engineering, 2011, 47(23): 20-29.
[12]肖正明,秦大同,王建宏,等. 盾构机主减速器三级行星传动系统扭转动力学[J]. 中国机械工程,2010,21(18):2176-2182.
XIAO Zheng-ming, QIN Da-tong, WANG Jian-hong,et al. Study on torsional dynamic of 3-stage planetary gears of main reducer used in driving cutterhead of shield tunnelling machine[J]. China Mechanical Engineering, 2012, 21(18): 2176-2182.
[13]Al-shyyab A, Alwidyan K, Jawarneh A. Non-linear dynamic behaviour of compound planetary gear trains: model formulation and semi-analytical solution[J]. Journal of Multi-body Dynamics, 2009, 223:199-210.
[14]朱自冰,朱如鹏,鲍和云. 两级星型齿轮传动系统非线性动力学研究[J]. 航空动力学报,2007,22(11): 1963-1970.
ZHU Zi-bing, ZHU Ru-peng, BAO He-yun. Non-linear dynamic study of 2-stage star gear train[J]. Journal of Aerospace Power, 2007,22(11): 1963-1970.
[15]孙智民,沈允文,李素有. 封闭行星齿轮传动系统的动态特性研究[J]. 机械工程学报,2002,38(2):44-48.
SUN Zhi-min, SHEN Yun-wen, LI Su-you. Study on dynamic behavior of encased differential gear train[J]. Chinese Journal of Mechanical Engineering, 2002, 38(2):44-48.
[16]刘辉, 蔡仲昌,朱丽君,等. 多工况条件下单级行星传动非线性振动特性研究[J]. 兵工学报,2012,33(10):1153-1161.
LIU Hui,CAI Zhong-chang, ZHU Li-Jun, et al. Study on nonlinear vibration behavior of simple single stage planetary gears in multiple work conditions[J]. Acta Armamentarii, 2012, 33(10): 1153-1161.
[17]刘辉,蔡仲昌,项昌乐.发动机激励下行星传动非线性啮合力的动态特性研究[J]. 振动、测试与诊断,2014, 34(1):83-89.
LIU Hui, CAI Zhong-chang, XIANG Chang-le. Study on nonlinear meshing force dynamic behavior of planetary gears on engine excitation[J]. Journal of Vibration, Measurement & Diagnosis, 2014, 34(1): 83-89.
[18]Parker R G, Lin J. Mesh phasing relationships in planetary and epicyclic gears[J]. Journal of Mechanical Design, 2004, 126: 365 -370.

第一作者陈玉震男,博士,1987年生
通信作者陈飙松男,博士,教授,1973年生
猜你喜欢
中国人口·资源与环境(2016年11期)2017-02-17 09:25:59
财经理论与实践(2016年6期)2017-02-09 09:13:18
价值工程(2017年2期)2017-02-06 21:35:20
汽车科技(2016年5期)2016-11-14 08:03:52
科技视界(2016年23期)2016-11-04 08:14:28
现代经济信息(2016年21期)2016-10-25 13:22:39
科学与财富(2016年28期)2016-10-14 00:06:31
科技视界(2016年24期)2016-10-11 12:53:13
中国市场(2016年29期)2016-07-19 04:01:57
电脑知识与技术(2016年14期)2016-06-30 19:45:18
