对基于模糊PID的足球机器人电机控制系统设计研究
2014-05-28 06:19董娜娜
商 2014年42期
董娜娜
摘 要:针对机器人运动的时变、非线性、干扰大、不确定等特性,本文在传统PID控制基础上提出了一种与模糊控制器相结合的混合型模糊PID控制方法。该方法弥补了传统PID控制所需精确数学模型、参数整定困难等不足,保证了系统的快速性、稳定性和灵活性。
关键词:模糊PID;角度控制;仿真
1.控制系统结构
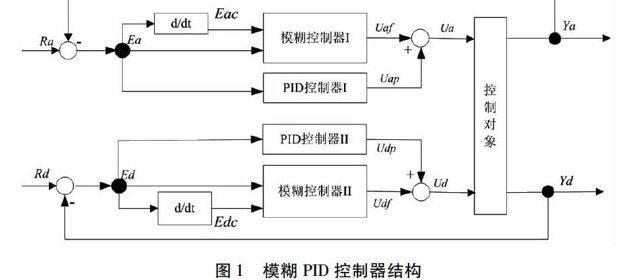
本系统中由于机器人的运动涉及到角度及距离两个方面,所以本文中的模糊PID控制器具體设计为两组控制器构成:一组用于控制机器人的角度转动,一组用于机器人的位置移动。具体结构图如图1所示。
其中Ra、Ya为角度的输入输出,Ea、Eac为角度误差及其变化率,Uaf、Uap为角度模糊控制器和PID控制器输出,Ua为角度控制器总输出。同理,位置的控制输出也是如此。下面进一步以电机角度的模糊PID控制为例来说明系统的可行性。
2.模糊控制器的设计
设在采样时刻t,误差和误差的变化分别为:
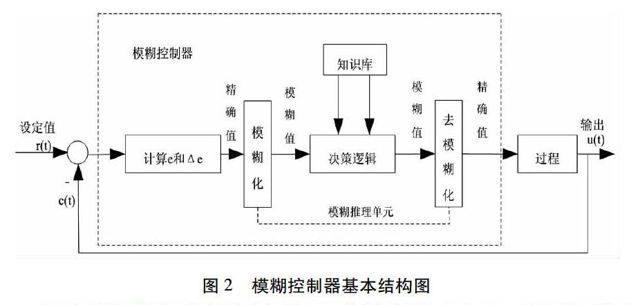
本模糊系统设计为二维控制器:et、Δet为两个输入变量,ut为输出变量。模糊控制器的基本结构如下图2所示。
从上述控制器的系统设计中知道PID控制器的输出为Uap,模糊控制器的输出为Uaf,故总输出为Ua=Uap+Uaf=KP×et+Ki×∫etdt+Uaf 。
根据模糊控制规律本文设计系统中没有微分环节,而参数Kp、Ki是通过实验方法确定的。从角度和距离的实际情况中我们可以看出,不同范围的误差变化,系统要取得好的控制效果,Kp、Ki参数是不同的。例如,在角度控制中,Kp适合于误差为10o到20o的中等角度,但它对5o以下的小角度调节时,Kp×et就会过小,从而使得调节时间较长、稳态误差增大;但在对40o以上的大角度调节时,Kp×et就会过大而出现较大的超调,调节时间也相应延长。所以针对这样的情况,在本论文中的PID控制器的设计针对不同范围的误差,采用了多组参数值的方法。将角度误差范围分为小(0-5o),中(5o-25o)、大(25o以上)3个区域,每个区域对应不同的参数值。经过实验,本论文中的小角度误差时Kp取0.65,Ki取0.0015;中角度时Kp取0.35,Ki取0.0015;大角度时Kp取0.15,Ki取0.001。
3.实验结果分析
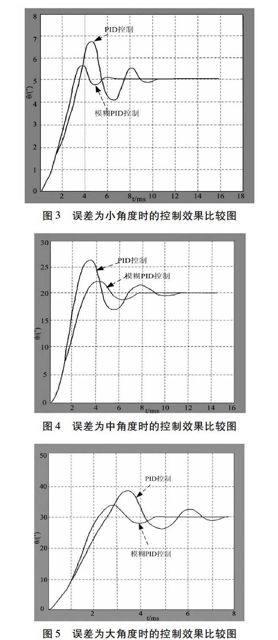
本系统的实验是利用MATLAB的Simulink仿真环境对系统进行的。下图3、4、5就是角度范围划分不同情况下单一的PID控制与模糊PID控制的效果对比图。
实验结果分析:
(1)从图3和图4可以看出,在单一的PID控制输出超调量较大时,引入模糊控制后,确保快速性的情况下能够减小系统输出的超调量。
(2)从图5可以看出,在单一的PID控制输出调节时间过长时,引入模糊控制后,确保不损失控制精度的情况下,能迅速减小调节时间。
4.总结
通过实验对本文所提出的模糊控制器与单一PID控制器相结合构成的模糊PID控制算法进行了测试,并通过仿真曲线图形显示了模糊PID控制算法能够保证机器人足球系统运动控制的准确性和稳定性,又缩短了动态调整时间,取得了较好的控制效果。(作者单位:长春工业大学人文信息学院)
参考文献:
[1] 诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005.
[2] 李琳,曾孟雄.模糊PID控制在运动控制中的应用[J].机械与电子,2006(2).
[3] 田琦,李琪,姚鹏,赵媛.基于模糊PID的全方位移动机器人运动控制[J].电子科技,2011(9).
猜你喜欢
中国新通信(2017年3期)2017-03-11
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年23期)2016-11-04
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21
科技视界(2016年5期)2016-02-22
现代电子技术(2015年11期)2015-07-28