竞技健美操跳跃类难度动作C477运动学分析
2013-08-15 12:17詹晓梅袁文丽
湖北体育科技 2013年10期
刘 红,詹晓梅,袁文丽
随着竞技健美操运动的不断发展,对运动员难度动作的要求也越来越高[1]。高质量地完成难度动作是运动员取得比赛成绩的关键所在。本文从运动学角度对我国优秀男子竞技健美操运动员转体180°屈体跳再转体180°成俯撑动作技术进行研究,运用三维实验测量等方法,对该动作进行运动学分析,从而改进我国优秀竞技健美操运动员完成难度动作的技术水平和完成质量。
1 研究对象和方法
1.1 研究对象
寿旻超,国际健将,2011年世界杯健美操系列赛法国站男子单人操冠军;潘芑骥,健将,2012年世界杯健美操系列赛法国站六人操亚军;席延峰,国家一级,2012年世界杯健美操系列赛法国站六人操亚军。
1.2 研究方法
1.2.1 文献资料法
通过中国知网、万方数据库、Pubmed、Spinger等数据库及江西师范大学图书馆,广泛查阅和收集有关竞技健美操难度动作和运动生物力学方面的资料,把握目前有关竞技健美操运动中难度动作技术运动学研究的状况,并对有关资料全面阅读,加以归类、分析。
1.2.2 实验测量法
测试仪器及测试要求:实验使用两台日本索尼摄像机在健美操训练馆的标准比赛场地(竞赛木地板)进行拍摄,摄像机拍摄速度25 s/帧,摄像机高度为1.20 m,两台摄像机主光轴夹角约为90°,到定标架距离约为8.5 m,摄像机之间的距离约为10 m。拍摄前,用三维标定框架对拍摄动作范围进行标定并录制,再定点同步拍摄,拍摄时采用德国进口SI MI-motion三维动作解析系统软件拍摄三位运动员三组共计9次难度动作。
数据采集与处理:将现场拍摄的材料运用美国ARIEL公司的APAS系统进行解析,从三组难度动作中取每个运动员较好的一个作为分析对象,截取所要分析的视频,对人体每格画面关节打点,共17个关节点和26个环节控制点,然后将2D转换成3D,最后对所获得的数据进行平滑处理,获得难度动作运动学参数。
1.2.3 数理统计法
对实验所得的相关数据运用Excel2003进行统计处理。
2 结果与分析
根据国际体操联合会(FIG)2013—2016健美操评分新规则中对“转体180°屈体跳再转体180°成俯撑”动作的描述为:垂直起跳转体180°空中完成一次屈体,空中再转体180°前倾准备落地,成俯撑姿态落地。动作属于C组难度动作中跳与跃—C477,分值为0.7分。对“转体180°屈体跳再转体180°成俯撑”的要求为:躯干和双腿的夹角不得大于60°。根据“转体180°屈体跳再转体180°成俯撑”技术竞赛规则将难度动作划分为三个阶段:起跳阶段即起跳脚着地时刻至起跳脚离地时刻;腾空阶段即起跳脚离地时刻至手脚落地时刻;落地时刻即手脚落地时刻至缓冲成静止姿态。
2.1 重心相关运动学参数的描述与分析
跳跃类难度动作要表现出高质量,主要在于空中能准确、优美地完成动作[2]。在空中完美的展现动作,必须要有足够的腾空高度,才能有足够的空中时间完成与控制好各种空中动作,并且让人在视觉上能产生飘逸的感觉。表1可见,寿旻超的腾空高度最高为0.82 m,其次是潘芑骥为0.81 m,席延峰的腾空高度最低,只有0.56 m;腾空时间上,席延峰的腾空时间为0.56 s,与寿旻超相比较,腾空时间少了0.1 s,导致他的腾空高度不高,在空中停留的时间较短,空中姿态展示不充分。数据表明运动水平越高,其腾空高度越高、时间越长,空中姿态展示越充分。
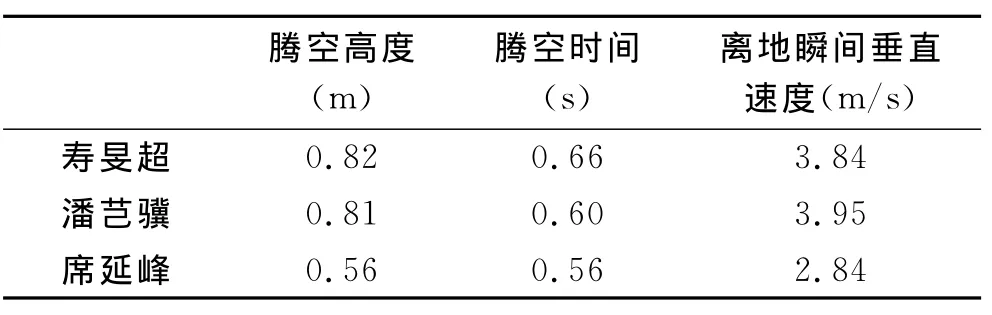
表1 C477难度动作重心运动学参数
竞技健美操规则要求跳跃类难度动作必须最大极限地展示爆发力和最大的动作幅度。表1显示,寿旻超的离地瞬间垂直速度为3.84 m/s,潘芑骥的离地瞬间垂直速度为3.95 m/s,席延峰的离地瞬间垂直速度为2.84 m/s,其中席延峰的垂直速度比潘芑骥小了1.11 m/s,导致其没有足够的腾空时间去完成空中动作。但是潘芑骥的离地瞬间垂直速度比寿旻超要快0.11 m/s,腾空时间却比寿旻超的腾空时间少了0.06 s,腾空高度也少了0.01 m,说明并不是离地瞬间垂直速度越大腾空时间就越长,这可能说明运动员要完成C477难度动作,必须具有较好的爆发力素质,空中姿势的平衡、动作完成幅度和技术规范程度都可能导致腾空时间缩短,影响整个难度动作的完成。
2.2 起跳阶段运动学参数描述与分析
起跳分为缓冲和蹬伸两个阶段。缓冲是下肢各关节伸肌(踝关节屈肌)屈髋、屈膝和伸踝作离心收缩完成退让工作的过程,为后续蹬伸动作的完成储备弹性势能为蹬伸创造必要工作条件。蹬伸是整个起跳过程中最关键的阶段,肌肉由退让性收缩变成主动性收缩,通过下肢关节依次伸髋、伸膝和屈踝对地面产生作用力与反作用力,使人腾起。表2显示,三位运动员在起跳阶段踝关节的缓冲幅度是最大的,其次是膝关节,可见,三位运动员起跳阶段主要是靠增大股四头肌、小腿三头肌的初长度储备弹性热能。席延峰的踝关节缓冲幅度比其他两位运动员要小,只有31.8°,在蹬伸阶段用时比另外两位少,离地瞬间垂直速度也是最小的,由此说明一级运动员应加强屈膝伸踝肌群的的伸展性和爆发力训练。三位运动员髋关节的缓冲幅度按运动水平呈递减态势,分别为6.5°、5.4°、4.2°,从表面上看是髋关节不参与缓冲活动,其实髋关节的缓冲方式和膝、踝关节缓冲的不同。谭吟月、王玉君等在对竞技健美操弹动技术中髋关节的运动学分析中指出:髋关节是在髂腰肌、阔筋膜张肌、缝匠肌、骨直肌、臀大肌、臀中肌、臀小肌和股后肌群等肌肉群的协同作用下,迅速制动,做伸展运动或弯曲运动,但都是为保持髋关节的稳定性和维持上体的姿态。所以,在起跳阶段髋关节的缓冲幅度最小[3]。
2.3 腾空阶段运动学参数描述与分析
空中动作是跳跃类难度动作中的重要部分,空中动作完成的好坏,决定整个技术的成功与否[4]。表3可见,三名运动员的躯干与双腿夹角分别为:24.8°、47.3°、31.9°,都符合竞技健美操规则对躯干与双腿的夹角不大于60°的要求,整体动作完成质量较高。潘芑骥的左右髋关节角度为170.7°、173.1°,寿旻超的左右髋关节角度为160.9°、167.5°,几乎是以直体方式完成转体180°,而席延峰的左右髋关节角度为149.3°、170.4°,髋关节左右两边角度相差较大,导致身体向左边倾斜,转体时没有以直体方式完成,加大了身体纵轴的转动半径,不利于身体绕纵轴转动;髋角大有利于缩短身体纵轴转动的半径,提高转动角速度,有利于身体垂直转动,减少能量损失,为下一步技术环节的完成创造良好的条件[5]。身体控制的实质是通过骨骼肌力量控制身体的稳定和平衡,特别是腰背肌对核心位置的稳定,在四肢动作的衔接过程中,起着承上启下的作用[6]。所以,在今后训练中应加强对腰腹肌的训练,例如两头起、转体等辅助性练习。

表3 腾空阶段主要技术参数(单位:°)
踝关节角度和膝关节角度都属于运动员姿态的细节问题。竞技健美操中要求运动员最大可能的绷直脚面来体现姿态美,但由于踝关节特有的生理结构,是不可能完全达到180°,只能以越接近180°来作为判断姿态是否优美的标准[7]。表3中数据显示,寿旻超的踝关节姿态最好,席延峰和潘芑骥的踝关节角度过小,且潘芑骥的左踝角度只有65.2°,说明他的脚面在空中没有绷直,从录像中也可以看出,潘芑骥在腾空过程中身体过早的往后倒,影响了空中姿态,在平时训练中要加强对动作细节的重视。三位运动员的膝关节角度都接近180°,说明三位运动员在转体180°时膝关节都保持了直膝状态。
2.4 落地阶段运动学参数与分析
落地阶段是整个动作的结束部分,动作好坏直接影响整个难度动作的完成情况,且易对运动员造成身体的损伤。所以,落地阶段的上下肢缓冲是结束部分的关键。俯撑落地是手指触地同时脚尖触地,迅速屈腕、屈肘、肩关节外展、屈脚趾缓冲的过程[8]。表4中上肢关节运动学指标可知,落地缓冲阶段主要是靠肘关节和肩关节的缓冲来完成动作,肘关节的缓冲幅度最大,其次是肩关节。腕关节的缓冲幅度最小,主要是用来支撑身体的作用。寿旻超肘关节的缓冲幅度最大,左右肘关节缓冲幅度分别为60.9°、42.1°,说明他在落地时积极缓冲,减少了地面对肢体的反作用力,不容易受伤;潘芑骥左右肘关节的缓冲幅度分别为:10.7°、12.3°,没有积极屈腕,容易造成对手腕的冲击力过大而导致腕关节受伤。表4数据显示:寿旻超落地时肘关节左右最大屈角为101.5°、104.7°,关节角度在90-110°之间。章旌红、严发本在对肘关节角度与外负荷的关系中得出结论:肘关节在做屈伸运动时,当角度为90-110°时,肌力的运动效果最佳,最省力,克服的阻力最大[9]。可见,落地时肘关节的缓冲幅度最大,其次是肩关节,腕关节的缓冲幅度最小,肘关节屈角在90-110°之间,运动员完成难度动作效果最佳。
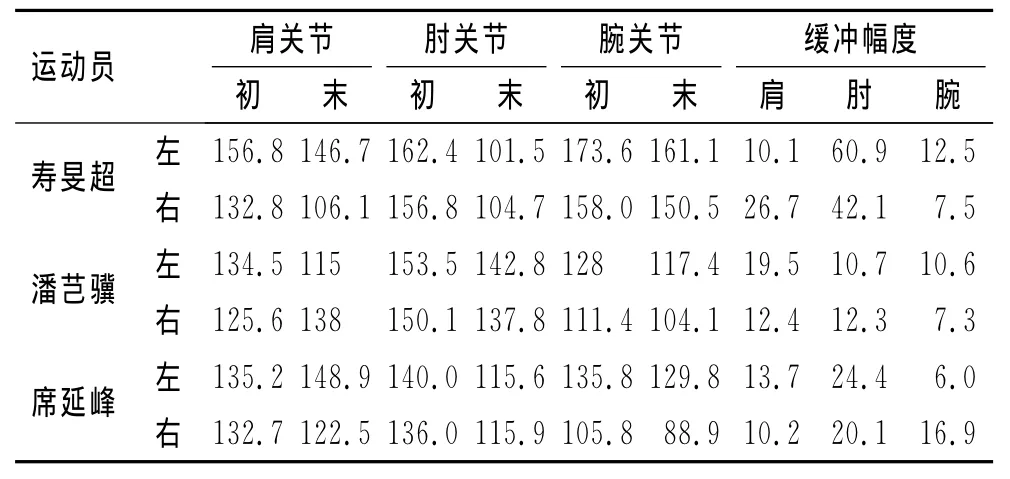
表4 落地缓冲阶段肩、肘、腕关节角度(单位:°)
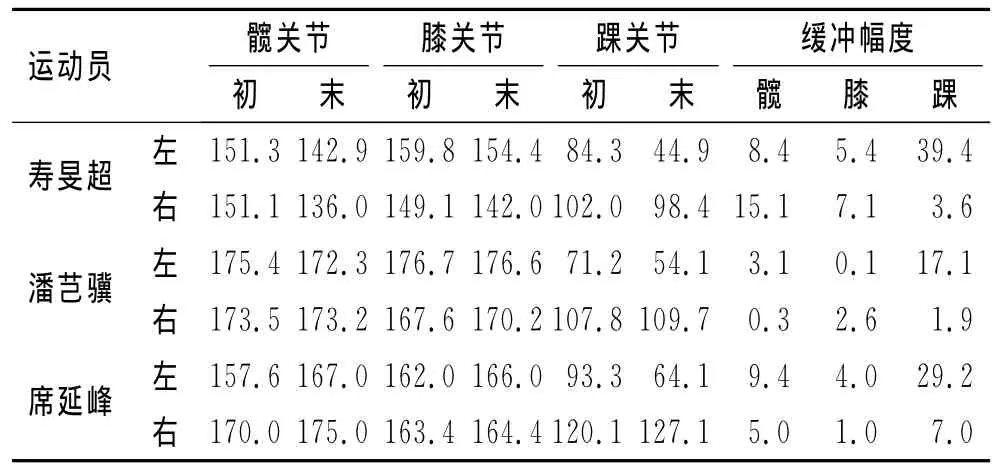
表5 落地缓冲阶段髋、膝、踝关节角度(单位:°)
表5中C477难度动作落地缓冲阶段过程中下肢各关节的运动学参数可见,踝关节的缓冲幅度最大,在25-40°之间,其次是髋关节,5-20°之间。有研究指出:人体从高空成俯撑落地,膝关节在落地时缓冲幅度较小,脚部的缓冲主要靠踝关节以勾脚落地支撑来缩短小腿骨与脚踝之间的距离,达到加强固定的作用和加强支撑力的作用,而绷脚落地支撑容易因落下的冲力与地面反支撑力的相互作用而损伤脚踝部[10]。表5数据显示:寿旻超踝关节缓冲幅度为39.4°,席延峰踝关节的缓冲幅度为29.2°,都主动勾脚面来支撑缓冲落地,而潘芑骥落地时踝关节的缓冲幅度为17.1°,没有充分缓冲,加大了踝关节与地面的冲击力。因此,在C477难度动作中,高空落地支撑应保持合理的勾脚(伸踝)角度,以达到加固和支援作用。
3 结论
1)高重心和爆发力强是大幅度完成C477难度动作的前提。起跳阶段踝关节角度在40-50°之间、膝关节角度在30-45°之间的充分缓冲将为后续蹬伸动作的完成储备较大的弹性势能,以保证运动员充分展示空中姿态。2)完成C477腾空时,水平越高的运动员,其髋、膝、踝关节角度越大,说明其起跳充分并且有利于身体绕纵轴转动;踝关节度角大,绷直脚面可体现竞技健美操的姿态美。3)C477落地缓冲阶段,主要是靠肘关节的缓冲和踝关节勾脚的支撑来完成,肘关节屈角为90-110°、踝关节缓冲角度为25°~40°时,运动员完成落地效果最佳。
[1] 王 敏.对竞技健美操“屈体分腿跳成俯撑”动作的运动学分析[D].上海:上海体育学院,2010.
[2] 杨 宏.我国优秀男子竞技健美操运动员难度动作的三维运动学分析[D].南昌:江西师范大学,2008.
[3] 谭吟月,王玉君,谈 强.竞技健美操弹动技术中髋关节的运动学分析[J].苏州市职业大学学报,2007(3).
[4] 赵卓然.健美操剪式变身跳转体180°动作的运动学研究[D].长春:东北师范大学,2006.
[5] 彭 亮.竞技健美操剪式变身跳转360°动作运动学分析[J].西南石油大学学报(社会科学版),2012(5).
[6] 吴丽华.健美操课程中运动损伤的解剖学分析与思考[J].黄山学院学报,2011(5).
[7] 马凌波.不同水平竞技健美操运动员完成C467和C477的技术诊断[D].北京:北京体育大学,2009.
[8] 章旌红,严发本.肘关节角度与外负荷的关系[J].武汉体育学院学报,2000(2).
[9] 周全权.落地成俯撑动作运动学分析[J].黑龙江科技信息,2009(35).
猜你喜欢
中华肩肘外科电子杂志(2020年1期)2020-12-20
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
中华肩肘外科电子杂志(2019年4期)2019-01-03
制造技术与机床(2018年11期)2018-11-23
中华肩肘外科电子杂志(2016年3期)2016-01-23
海军航空大学学报(2015年1期)2015-11-11
城市道桥与防洪(2015年3期)2015-03-20
现代企业(2015年2期)2015-02-28
都市快轨交通(2014年1期)2014-02-27