
TTLD-YOLOv7:非结构化环境下茶树病害的检测算法
2024-07-10 06:00俞淑燕杜晓晨冯海林李颜娥
茶叶科学 2024年3期
俞淑燕 杜晓晨 冯海林 李颜娥
摘要:茶树病害对茶树种植业和相关行业的影响极为严重。在动态而复杂的茶园环境中检测疾病的传统方法效率低下,检测效果不尽人意。本研究提出一种基于YOLOv7-tiny的模型,增强了茶树病害的细微检测能力。通过整合CoordConv和ECA信道关注机制,本模型在卷积特征图中实现了更高的空间识别能力,并降低了背景噪声对特征识别的影响。进一步的改进包括采用归一化瓦瑟斯坦距离度量和去耦头,以提高对小病斑的检测能力。使用K-means算法根据茶树病斑的特殊性生成了新的锚框,提高了模型的精确性和通用性。对比分析表明,该模型优于现有模型Faster R-CNN、SSD、YOLOv5s、YOLO-Tea、YOLOv7-tiny和YOLOv7,平均精确度提高5.39个百分点,达到了93%。改进后的模型可应用于茶树病害监测。
关键词:茶树病害;YOLOv7-tiny;自然环境;目标检测
中图分类号:S571.1 文献标识码:A 文章编号:1000-369X(2024)03-453-16
TTLD-YOLOv7: An Algorithm for Detecting Tea Diseases in An Unstructured Environment
YU Shuyan, DU Xiaochen*, FENG Hailin, LI Yan′e
College of Mathematics and Computer Science, Zhejiang Agriculture and Forestry University, Hangzhou 311300, China
Abstract: Tea diseases have an extremely serious impact on tea plantations and related industries. Traditional methods for disease detection in the dynamic and complex tea plantation environment are inefficient and unsatisfactory. This study proposed that a YOLOv7-tiny-based model enhanced the fine-grained detection of tea tree diseases. By integrating CoordConv and ECA channel attention mechanisms, this model achieved higher spatial recognition capability in convolutional feature maps and reduced the effect of background noise on feature recognition. Further improvements included the use of a normalized Wasserstein distance metric and decoupled heads to improve the detection of small spots. A new anchor frame was generated using the K-means algorithm based on the specificity of tea spots to improve the accuracy and generalizability of the model. Comparative analysis shows that the model outperforms the existing models Faster R-CNN, SSD, YOLOv5s, YOLO-Tea, YOLOv7-tiny, and YOLOv7, with an average accuracy improvement of 5.9 percentage points to 93%. The improved model could be applied to tea disease monitoring.
Keywords: tea diseases, YOLOv7-tiny, natural environment, object detection
茶树(Camellia sinensis)是世界上重要的农作物之一,被广泛种植和消费,茶产业的健康和可持续发展对于许多国家和地区至关重要。随着经济水平的不断增长,茶叶的需求量也随之增加,消费者对茶叶的品质要求也越来越高[1]。然而,茶树病害不仅对茶产业和经济构成威胁,还对环境、生态系统和社会产生了广泛的负面影响[2]。目前茶树病害检测存在多种弊端,限制了有效的茶树病害检测和品质控制。传统的茶树病害检测方法通常依赖于人工巡检,这涉及到主观判断和经验,不同的检查员可能会对茶树病害的识别结果不一致[3]。人工巡检方法只能覆盖有限的茶树植株和茶园面积且需要定期巡查茶园,这意味着病害的早期发现和诊断可能会延迟,导致病害扩散和加重[4]。茶树病害检测通常受到自然环境变化的影响,如不同的气象条件和光照情况,因此传统方法易受干扰,难以适应多样化的环境[5]。因此,开发一种更准确、高效、方便应用的茶树病害检测方法对茶产业的可持续发展至关重要。
随着计算机技术的飞速发展,机器学习(ML)和深度学习(DL)逐渐代替人工检测方法,实现对茶树病害的检测[6]。Nath等[7]通过融合注意力机制和SVM在构建的茶数据集上得到了99.28%的准确率。Sun等[8]融合SLIC与SVM,利用SVM分类器对SLIC得到的超像素块进行分类,最终提取图像中的茶树病害。林彬彬等[9]通过HSV提取病斑颜色特征,并使用K近邻算法对3种茶树病害分类,识别率达到93.33%。然而,ML在特征提取上需要花费大量时间,在复杂环境下的识别效果不尽人意。
近年来,DL因具有自动学习和特征提取的优势,受到了学术界的广泛关注,在对植物病害识别的研究中取得了许多进展[10]。孙道宗等[11]对YOLOv4替换主干网络与卷积以减少模型参数量,并插入卷积注意力模块提升对茶树病斑的识别精度。Xue等[12]提出用改进后的YOLOv5s对患病的茶树叶片进行检测,其结果与原始模型相比,提高了0.3%~15.0%。叶荣等[13]提出YOLOv5s-ECA-ASFF算法,通过引入高效通道注意力(Efficient channel attention,ECA)机制和自适应空间特征融合技术,提高模型在检测茶树病害时的抗干扰能力。Bao等[14]对YOLOv5增加二维混合注意力和多尺度RFB模块,使用RCAN重构后的茶树枯萎病图像进行训练,改进后模型的平均精度均值较原始模型提高了3.8%。Soeb等[15]首次尝试将YOLOv7应用于检测茶树病害,与以往的植物病害检测算法相比取得了出色的结果。
目前,互联网上有许多关于蔬果、粮食作物的病害数据集,但茶树病害的数据集很少,且较少涉及对复杂环境下茶树病害的目标检测。尽管深度学习技术在目标检测方面表现出色,但在自然环境下进行茶树病害检测仍然具有一定挑战[5]。茶园中的背景可能包括树木、土壤和其他植被,这些都会干扰茶树病害的检测。光照变化也会影响检测精度,因为茶树叶片在不同的天气和光照条件下会产生不同的图像特征。此外,叶片相互遮挡也会增加检测难度。
针对上述茶树病斑检测存在的难点,本研究旨在为茶园提供一种高效、自动化的病害检测方法,有助于提高茶产量和品质,降低资源浪费,促进茶产业的可持续发展。
1 试验数据
1.1 数据采集与处理
本研究选择杭州市西湖区的龙坞茶村和杭州市临安区浙江农林大学东湖校区作为数据主要采集地点,通过智能手机(型号:iPhone 11)后置摄像头(双摄:1 200万像素)以多个方向、角度和距离采集自然条件下的茶树病害图像,图像分辨率为3 024像素×4 023像素,以.jpg格式保存。本研究特意选择在不同的时间(2022年9—10月和2023年3—6月)、光照(9:30—16:00)和距离(10~50 cm)条件下拍摄,且在拍摄时特别聚焦于病斑的位置,以确保病害清晰可见,有利于后续模型的特征提取。此外,图像的背景包括了茶树枝干、枯叶、土壤和杂草等,这些元素的存在使得数据集更具自然真实性。
1.2 茶树病害数据集制作
1.2.1 数据集划分
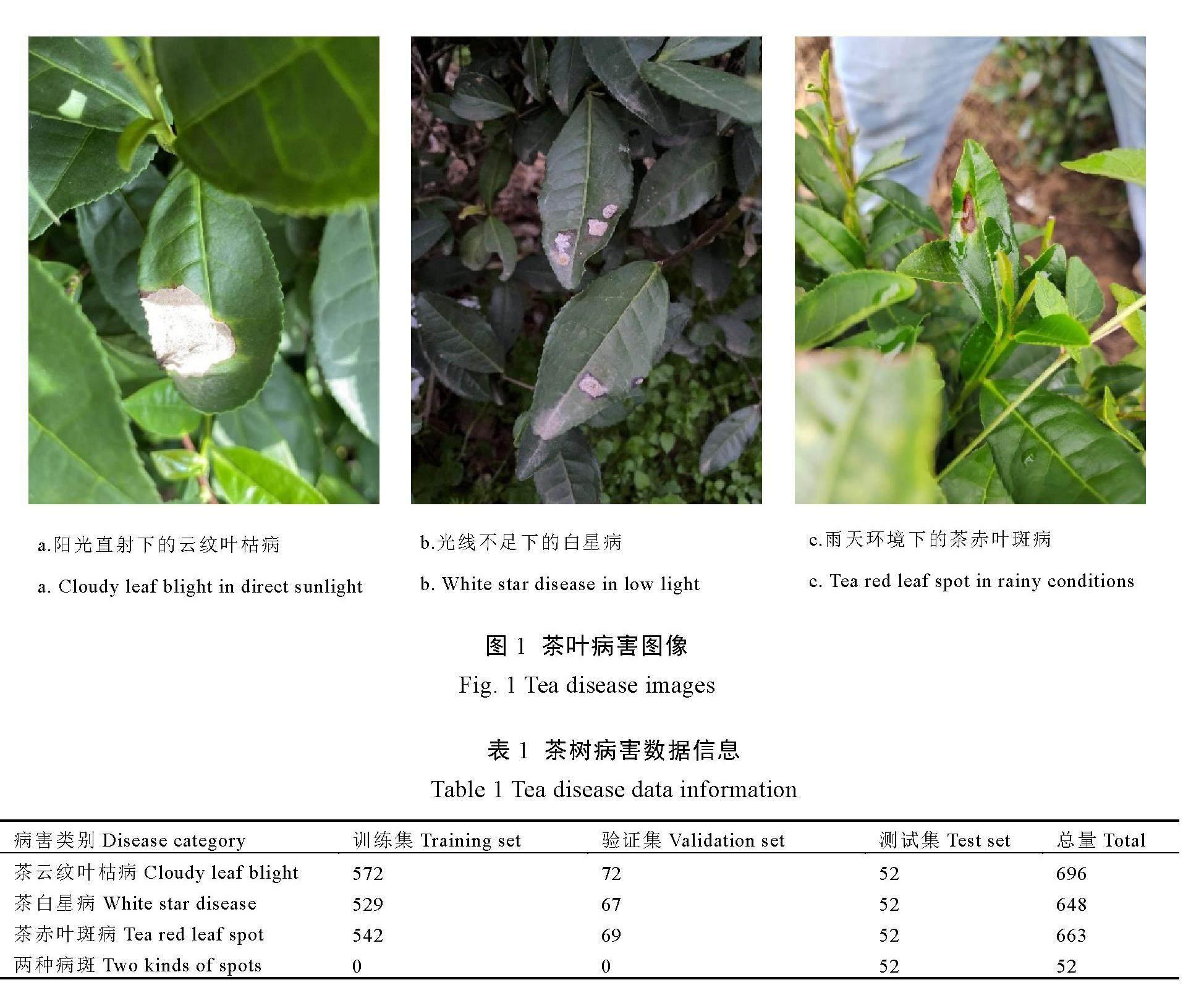
对采集到的图像进行数据清洗,共得到2 059张图像,其中包括了3种常见的茶树病害,分别是云纹叶枯病(696张)、白星病(648张)和茶赤叶斑病(663张)。另外,还有同时患有上述两种病害的52张叶片图像。图1展示了在自然环境下采集的3种茶
叶病害的图像示例。
本研究采用了Labelme工具对数据集进行手工标注,以获得茶树病斑的类别和位置信息,最终生成相应的JSON格式标注数据。由于本试验需要使用YOLO格式的数据集,因此将JSON格式进行相应转换,以确保数据能够与YOLO算法相兼容。
为建立一个均衡的数据集,按照8∶1∶1的比例将上述几种病害图像随机分为训练集、验证集和测试集,以确保不同类型的茶树病害在训练、验证和测试阶段都有足够的样本来保证模型的全面性和性能评估的可靠性。具体分配如表1所示。
1.2.2 数据增强
YOLOv7-tiny中的数据增强是一项重要的技术,旨在扩充训练数据集,提高模型的泛化能力和稳健性。首先,从训练数据集中加载原始图像,这些图像通常包含目标物体以及相应的标签信息。然后通过随机缩放、裁剪、旋转、翻转、色彩和对比度调整、马赛克、混合数据增强等方式对数据集进行扩充[16],通过上述方法增强后得到的一批训练图像如图2所示。这些操作帮助模型更好地泛化到未见过的数据,使其更好地适应不同的数据分布和场景,以增加训练数据的多样性,提高了模型的性能和稳健性。
2 研究方法
2.1 YOLOv7-Tiny目标检测模型
YOLO算法,作为单阶段目标检测算法的杰出代表,以其深度神经网络实现的目标物体识别和定位能力脱颖而出,并以出色的实时性能而闻名[17]。其中,YOLOv7-tiny是YOLO系列中的一种轻量级目标检测模型[18],由3个主要部分构成,分别是Input层、Backbone层和Head层。首先,Input层对输入的图像进行预处理,将其标准化为640像素×640像素的RGB图像,然后将其传递到Backbone层。Backbone层包括CBL模块、
ELAN模块和MP模块,它们共同负责从处理后的图像中提取有用的特征信息,并输出3个不同尺寸的有效特征层用于后续的检测。接下来,Head层通过对Backbone网络输出的特征进行融合,并生成边界框,同时进行物体类别的预测。最终,YOLOv7-tiny算法将综合这些信息,并输出最终的检测结果。
2.2 改进的YOLOv7-Tiny网络
直接将YOLOv7-Tiny应用于茶树病害检测时,由于茶园环境的复杂性,检测性能存在一定程度的不足,容易出现误检和漏检等问题。为了应对这些挑战,本研究提出了一种适用于非结构化茶园环境下的茶树病害检测模型TTLD-YOLOv7,结构如图3所示。
2.2.1 CoordConv卷积
CoordConv坐标卷积通过引入额外的坐标信息通道来增强卷积层的功能[19],其结构如图4所示。坐标通道的计算通常包括将图像的x和y坐标值标准化到特定范围,例如
[-1,1]或[0,1],然后将它们作为额外的通道添加到输入图像中。这样,每个像素点都包含了其x和y坐标的信息,从而有助于网络更好地理解物体的空间排列、大小和方向等方面的信息[20]。
CoordConv的引入能够提供更丰富的特征表示,提高模型在应对目标位置变化时的泛化能力,对于处理多样性的数据集和现实中的复杂场景非常有用。在目标检测任务中,CoordConv还可以减轻数据标注的负担。由于模型能够更好地理解物体的位置信息,因此标注物体的边界框可能不需要那么精确,从而减少了标注的要求。CoordConv可以嵌入到神经网络的不同层中,作为卷积层或者注意力层的一部分。在卷积操作中,CoordConv的坐标通道会与输入图像的通道进行连接,从而形成具有额外位置信息的特征图。本研究将CoordConv卷积应用于FPN(特征金字塔网络)结构中,并将LeakyRelu替换为Silu以适应CoordConv卷积,有助于模型更好地对弱目标的位置信息进行建模,提高了模型的泛化性能。
2.2.2 ECA注意力机制
ECA注意力是在挤压激励注意力(Squeeze-and-excitation,SE)机制基础上进行改进的,它是一种轻量级的注意力机制,引入的参数数量相对较少,因此不会显著增加模型的复杂性[21]。其通过使用大小为k的快速一维卷积来生成通道注意力,而k的值可以依靠通道维度的非线性映射进行自适应调整,从而增强了每个通道的特征提取能力[22]。其结构如图5所示。
茶树病斑检测任务通常需要处理不同光照和环境条件下的图像变化。ECA注意力可以帮助模型更好地适应这些变化,提高了模型的鲁棒性。ECA注意力允许模型自动学习哪些特征通道对于疾病斑点检测最为关键,这有助于模型集中精力关注与任务相关的特征通道,而忽略与任务无关的通道。通过ECA注意力,模型能够更好地感知关键信息,包括疾病斑点的形状、颜色和纹理等特征,可以提高疾病斑点的检测结果,减少误检和漏检的情况。
2.2.3 损失函数优化
IoU是被最广泛使用的用于测量边界框之间相似性的度量,其只考虑了边界框的重叠情况,对物体的形状和轮廓不太敏感,并且在基于锚的检测器中使用时会大大降低检测性能[23]。为了改善这种情况,本研究选择结合NWD(Normalized gaussian wasserstein distance)指标和IoU指标,按照0.5∶0.5比例替换标准的IoU,以测量边界框的相似性,由于IoU更适用于中大型目标,故本研究选择对其进行保留。NWD方法对物体的位置、尺度和旋转具有一定的鲁棒性,适用于各种不同形状和尺寸的目标,因此在非结构化茶园环境中对茶树病害的检测效果更好。由于茶树叶片中的病斑几乎不可能是标准的矩形,它们的边界框中难以避免存在一些背景像素,且背景像素多集中在边界框的边界,前景像素多集中在边界框的中心。为了更好地为边界框中的像素分配权重,将边界框建模为二维高斯分布,其中心像素享有最高权重,且权重大小沿着中心向边界逐渐降低,边界上的像素所分配到的权重最低[24]。具体描述,边界框中心点的坐标为(c_x,c_y),其宽度和高度分别表示为w和h。边界框的内切圆可以表示为:
··························(1)
二维高斯分布的概率密度函数可由下式表示:
··········(2)
上式中X、、分别表示高斯分布的坐标(x,y)、平均向量和协方差矩阵。当=1时,公式1中的内切圆即为二维高斯分布的密度等值线。因此边界框R可以建模为高斯分布N():
····················(3)
使用Wasserstein来计算预测框与真实框之间的损失,对于两个二维高斯分布的Na和Nb,其之间的二阶Wasserstein距离定义为:
·······································(4)
然而,是距离度量,并不能直接用作相似性度量。因此,使用其指数形式归一化,并获得称为NWD的新度量:
····(5)
在上述公式中,C是与数据集密切相关的常数,其数值大小为12.8。
2.2.4 解耦头
传统的目标检测模型通常采用一个统一的头部来同时执行分类和边界框回归任务,这种设计在实践中可能会引发一些问题。Song等[25]提出在目标检测的定位和分类任务中,存在空间偏差问题,即在对目标进行定位和分类过程中所聚焦和感兴趣的地方不同,定位主要关注于GTBox的位置坐标进而对边界框参数进行修正,而分类则更加关注所提取到的特征与现有类别中的哪类最为相似。Wu等[26]重新针对目标检测中的定位和分类两个任务进行解读,通过试验发现在进行分类任务时全连接头更具优势,尤其是对于小目标,卷积头则更适合于定位任务。综上所述,针对目标检测中定位和分类任务之间存在的矛盾,引入解耦头以替换原始模型中的标准检测头。解耦头的基本思路是分别设计两个头部,一个用于分类,一个用于回归,其结构如图6所示,先使用一个1×1的卷积进行降维,将分类与回归问题分离,使其由串行计算变为并行计算,并在两个分支中均添加两个3×3卷积,最后将预测结果整合在一起[27]。通过试验可知,将分类与定位任务独立优化,更容易调整和优化每个任务的损失函数,达到弱化分类和定位之间矛盾的作用,从而提高了目标分类和定位的性能。
2.2.5 基于K-means的初始锚框改进
在YOLO模型中,锚框是用来检测不同大小和纵横比目标的关键元素之一,可以通过对其进行调整来提高模型检测性能,若先验框与真实框越相近,则检测效果越好[28]。YOLOv7-tiny具有的初始锚框值是通过对COCO数据集聚类得到的,共有9个锚框,分别为[10,13]、[16,30]、[33,23]、[30,61]、[62,45]、[59,119]、[116,90]、[156,198]、[373,326],
然而COCO数据集中所包含的图像类型多样,目标大小差异很大,若直接应用在茶树病害数据集上会对检测结果造成影响。因此,为了模型能更好地检测病斑,避免盲目学习目标物体的尺寸和位置,根据试验数据集的特征,使用K-means聚类算法对训练集中的目标边界框进行聚类分析。K-Means算法将边界框分成若干个群组,每个群组代表一组具有相似大小和纵横比的锚框。在聚类完成后,通常会选择一些代表性的边界框作为锚框[29],因此[7,7]、[15,15]、[27,29]、[47,48]、[73,72]、[81,112]、[124,104]、[118,170]、[179,225]被选择作为本模型的锚框。这些锚框通常是每个聚类群组中的中心点,或者是聚类群组中包含的一些具有代表性的边界框。
2.3 参数设置与评价指标
2.3.1 试验环境与模型参数
本模型是在Windows操作系统下使用PyTorch 1.13.0深度学习框架进行训练的,编程语言采用Python 3.10。计算环境包括了CUDA 11.6.1版本,搭载了NVIDIA GeForce RTX 4090 GPU处理器,同时使用了13th Gen Intel(R) Core(TM) i7-13700KF CPU处理器。在模型训练过程中,采用了自动处理输入图像的方式,将其调整为固定大小的640像素×640像素。此外,根据网络模型的复杂性、数据集的样本数量以及GPU性能等因素,进行以下参数设置:训练epoch数设置为120,Batch size为8,优化器采用了随机梯度下降(SGD),初始学习率设定为0.01,最终学习率为0.001,学习率衰减系数为0.000 5,动量参数为0.937。
2.3.2 模型评价指标
本研究采用精确率(Precision,P)、召回率(Recall,R)、平均精度均值(Mean average precision,mAP)、F1值(F1 score)和权重大小作为评估模型性能的指标。以上指标的具体公式如下所示:
························(6)
···························(7)
·································(8)
······················(9)
式中,TP表示模型正确识别的病害目标数,FP表示模型将目标误识别为特定病害的数量,FN表示模型漏识别的病害数,m表示病害类别数。
3 结果与分析
3.1 使用迁移学习的性能比较
为了验证迁移学习对提升茶树病斑识别模型性能的影响,进行了未使用预训练权重和使用预训练权重两种情况下的试验比较,并将结果总结如表2所示。从表2中可以观察到,未使用预训练权重的模型具有较高的精确率,但召回率较低,导致其F1分数低于使用预训练权重的模型。进一步比较mAP0.5的数值,发现使用迁移学习训练的模型相对提高了1.1%的性能。
3.2 使用数据增强的性能比较
为了验证数据增强对茶树病斑识别结果的影响,在使用预训练权重的前提下,分别使用原始数据集和经过数据增强处理的数据集训练了YOLOv7-tiny网络,结果如表3所示。可以明显看出,使用经过数据增强处理的数据集训练生成的模型,在精确率、召回率、mAP0.5和F1分数等性能指标上均远远
优于使用原始数据集训练生成的模型。这表明,如果不使用数据增强的数据集进行训练,模型将难以实现对自然环境下茶树病害的准确检测。
这一结果强调了数据增强在提高模型性能方面的关键作用,尤其在应对自然环境多变性的情况下,数据增强可以帮助模型更好地适应光照、角度和背景等变化,从而提高了模型的稳健性和准确性。因此,在茶树病斑检测任务中,使用数据增强策略是非常重要的。
3.3 不同注意力机制的对比
CoordConv的引入确实能够提高模型的检测能力,但模型在特征提取方面仍有进一步的潜力可挖掘。在头部的SPPCSP结构中,依次在4个卷积层后引入了7种不同的经典注意力机制,包括SE、Simam、Biformer、CBAM、CoordAtt、CotAtt和ECA。试验结果如表4所示,其中A代表YOLOv7-tiny+CoordConv模型,从试验结果来看,不同的注意力机制对模型性能有不同程度的影响。
根据表4的测试结果,可以明显看出,在测试的所有注意力机制中,ECA表现出色,取得了最高的mAP0.5和mAP0.5:0.95得分,与Simam注意力机制相比,两者的mAP0.5均达到90.0%,虽然Simam的召回率在所测试的注意力机制中排名第一,比ECA略高0.8个百分点,但其精确率和mAP0.5:0.95得分相对较低,分别低于ECA 1.3个百分点和0.8个百分点。当引入CBAM注意力机制时,精确率最高,达到95.8%,但召回率、mAP0.5和mAP0.5:0.95得分均不及ECA,分别低了3.4个百分点、1.6个百分点和1.8个百分点。
这些试验结果强调了在目标检测中,针对不同任务和数据集,选择合适的注意力机制可以显著改善模型的性能。在茶树病斑检测中,ECA注意力机制在提高模型性能方面表现出色,为进一步改进模型性能提供了有力的参考。
3.4 消融实验
为了验证改进的模型在茶树病害检测中的有效性,进行了一系列消融实验,使用相同的平台和参数设置,相同的数据集进行训练、验证和测试。结果如表5所示,其中B、C、D、E和F分别表示在前一个基础上的改进。
从表5的结果可以看出,通过引入CoordConv坐标卷积,成功提高了模型的精确率、召回率、mAP0.5、mAP0.5:0.95和F1分数,分别比基准模型YOLOv7-tiny提高了3.4个百分点、0.7个百分点、1.7个百分点、1.7个百分点和2.0个百分点。这表明CoordConv的使用有助于增强模型对目标位置信息的学习能力。在模型中引入ECA注意力机制后,观察到模型提取目标特征的能力显著提高,mAP0.5提高到90.0%,mAP0.5:0.95提高到79.3%,同时精确率、召回率和F1分数也有所提升。通过结合NWD度量与IoU来替代传统的IoU度量,mAP0.5提升了1.3个百分点。这一改进有效地减轻了模型在小目标检测方面的困难。引入解耦头后,mAP0.5和mAP0.5:0.95分别提升了1.2个百分点和1.6个百分点。最后,通过使用聚类方法重新计算本数据集的锚框,进一步提高了模型性能。最终,本模型在mAP0.5和mAP0.5:0.95方面达到了93.0%和80.2%,
表明新的锚框更适用于茶树病害数据集,有助于更好地学习目标物体的尺寸和位置。
3.5 改进前后模型性能对比
为检测模型的改进效果,在同一训练条件下将TTLD-YOLOv7模型与原始YOLOv7-tiny模型进行损失曲线对比,对比图如图7所示。
从图7可知,两个模型在训练到10轮次时,损失值下降速度逐渐减慢,70轮次时损失值趋于平稳。改进后模型的训练和验证损失曲线始终位于原始YOLOv7-tiny损失曲线下方,表明在120次迭代中本模型损失值均
低于原始模型,模型的收敛速度更快,性能更稳定。试验对比了模型改进前后对云纹叶枯病、白星病和茶赤叶斑病的检测性能结果,如图8所示。
从图8可以看出,改进后的模型与原始模型相比,对云纹叶枯病、白星病和茶赤叶斑病检测的平均精度分别提高了4.1个百分点、9.3个百分点和4.2个百分点,达到了88.6%、93.2%和97.1%。这一结果表明,通过改进后,模型对茶树病害的检测效果显著提升,进一步增强了其在实际应用中的可靠性和准确性。
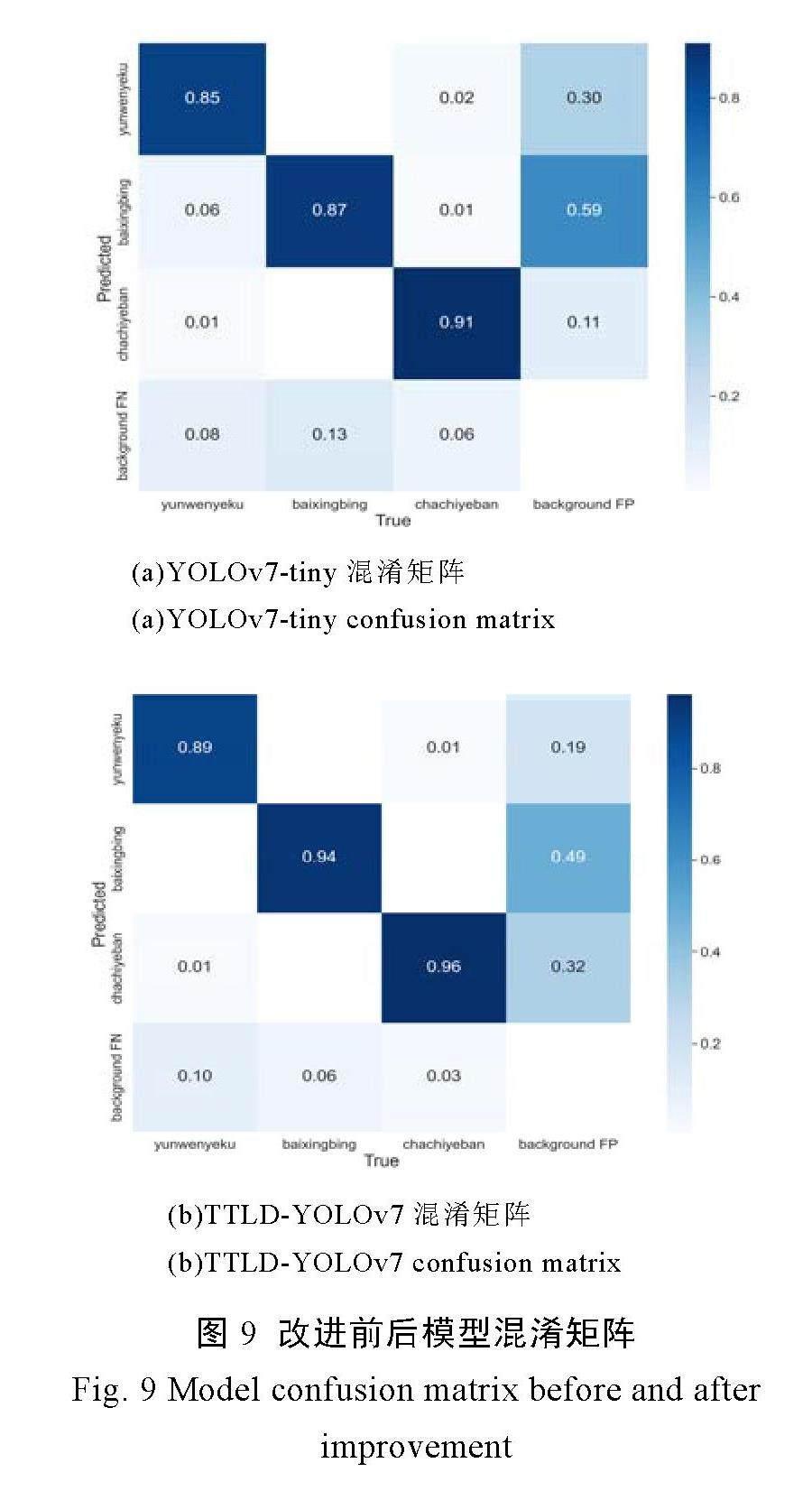
为进一步验证改进后模型的性能提升,使用测试集为改进前后模型绘制其相应的混淆矩阵,如图9所示。混淆矩阵能直观的展现各目标类别被错误分类为其他类别的比重,其中对角线代表某一目标被正确分类的比重。通过对比,可明显看出改进后模型对3种病斑的识别精度均得到了一定程度的提升。
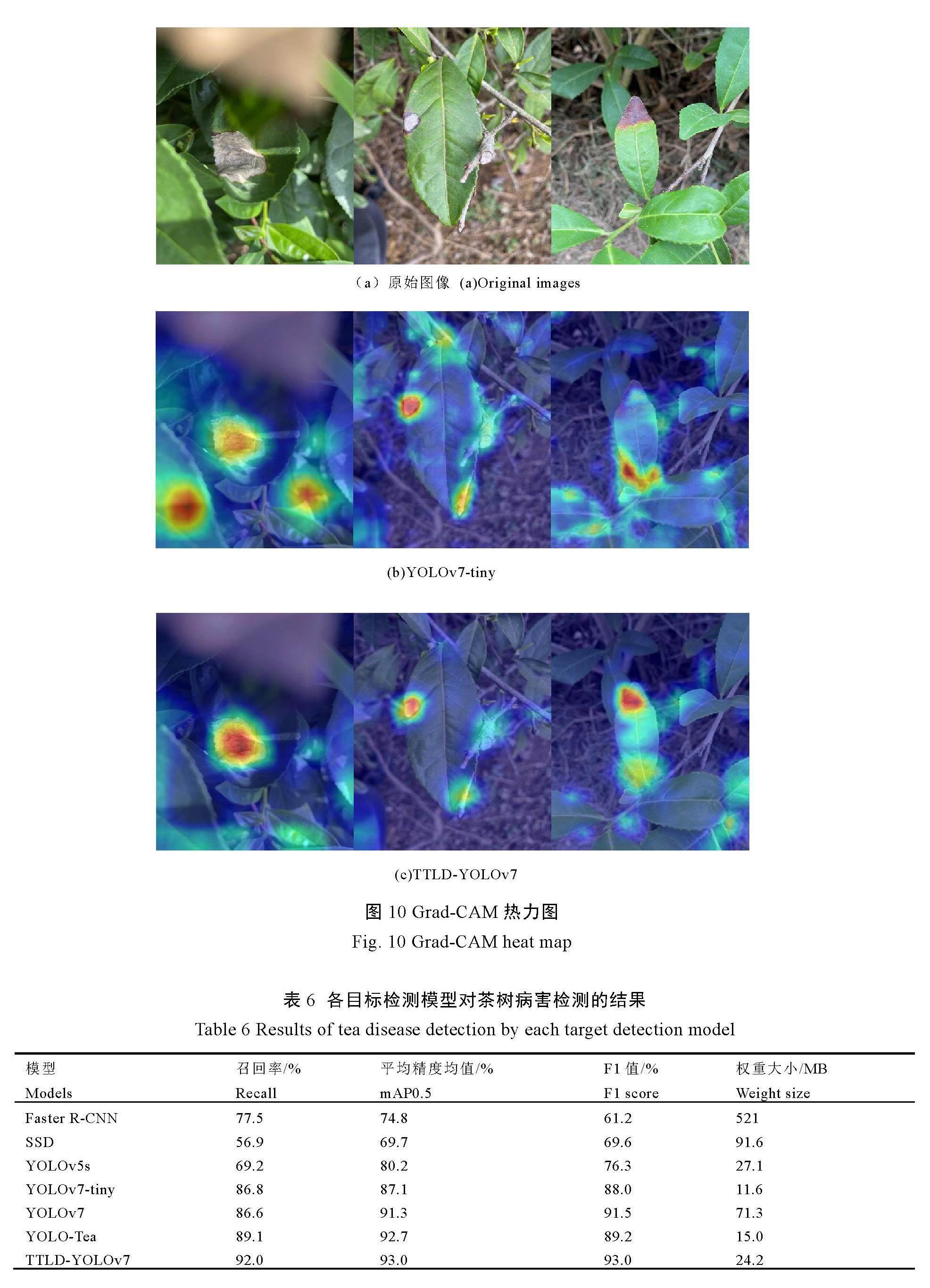
为了直观地评估改进后算法的有效性,使用Grad-CAM方法生成热力图并与原图叠加呈现,热力图中红色部分的颜色越深,表示模型对该区域的关注程度越高,据此分析模型的关注区域,以确定其是否学习了正确的特征信息。图10表明原始YOLOv7-tiny网络在识别茶树病斑时具有不精确与错误的焦点区域。相比之下,改进后的模型在面对遮挡、光线问题和小目标病斑时,能更好地聚焦到目标信息。这些结果验证了改进后算法的有效性。
3.6 不同模型的对比
为了深入探究不同模型在茶树病害检测方面的表现,并验证本研究提出的模型的有效性,在相同的试验条件下,选择了单阶段和双阶段目标检测中的几个经典模型,包括Faster R-CNN、SSD、YOLOv5s、YOLOv7-tiny和YOLOv7,并复现了YOLO-Tea[12],与本模型进行了对比。各模型在茶树病害测试集上的性能表现如表6所示。
根据表6的结果,在本数据集上,改进后的模型与其他6种模型相比,召回率、平均精度均值和F1值最高,分别为92.0%、93.0%和93.0%。与原YOLOv7-tiny模型相比,本模型的召回率、平均精度均值和F1值分别提高了5.2个百分点、5.9个百分点和5.0个百分点。通过对YOLOv7-tiny的改进,提高了模型的检测性能,但也增加了模型的复杂度,但仍比YOLOv7和Faster R-CNN少47.1 MB和496.8 MB。以上结果证明本模型在茶树病害检测任务中的卓越性能,尤其是在具有挑战性的非结构化环境下,能够提供高精度的检测,满足嵌入式移动终端等实际应用场景的需求。
3.7 检测效果对比
为更直观展现本模型的检测效果,采用了SSD、Faster R-CNN、YOLOv5s、YOLOv7-tiny、YOLOv7、YOLO-Tea[12]以及本模型对茶树病害测试集进行检测,检测效果如图11所示。
在图像采集的过程中,由于茶树叶片的随机空间分布,当焦点集中于离摄像头较近的病斑时,远离摄像头的病斑可能会出现模糊。图11中观察可见,YOLOv7和本研究提出的模型在检测云纹叶枯病时能够识别到较为模糊的远距离病斑,而其他模型则出现了漏检情况。SSD、Faster-RCNN和YOLOv5s
在检测白星病时漏检较多,可能是由于这些模型在处理小目标时无法充分捕捉到病斑的细节特征,从而在小病斑检测方面存在局限性。在实际的茶园环境中,同一叶片或同一区域可能同时存在多种病害,这为病害检测增加了挑战。正如图11所示,同一图像中可能包含多种不同类型的茶树病害。在这种情况下,SSD、YOLOv5s、YOLOv7-tiny、YOLOv7和YOLO-Tea等模型均出现了漏检现象,而初始模型YOLOv7-tiny甚至只检测到1个目标病害。相比之下,本模型不仅能够正确检测到所有病斑,而且在目标定位方面表现出色,更适用于自然环境下茶树病斑的检测。
4 讨论
本研究的核心目标在于为自然环境下的茶树病害开发一种高效的检测模型。为了迎接这一挑战,引入CoordConv以替代传统Conv层,嵌入特征金字塔网络,获取茶树病斑的准确位置信息。为了增强模型应对环境变化的能力和对小病斑的检测能力,采用ECA注意力机制和NWD度量方法。此外,引入解耦头以独立优化分类和定位任务,提升目标分类和定位性能。最后,通过K-means生成适用于本数据集的新锚框,提高了模型在非结构化茶园环境下检测茶树病斑的性能。
与多个经典目标检测模型比较,结果表明,改进后的模型在茶树病害数据集上表现出色,更具有竞争力。其在召回率、平均精度均值和F1分数3个关键指标上均为最优,这证明了本模型的有效性。通过直观展现各模型的检测结果,针对茶树病斑面积较小、外界环境干扰大等复杂情况,本模型具有较高的鲁棒性。
本研究提出的方法能够有效改善模型在非结构化茶园环境下的茶树病斑检测效果,可以完成茶树种植场景下的病害监测工作,其在实际茶园中的部署与维护成本较低,操作简便。对于服务端,该模型可部署于具有公网IP的云端服务器或托管于租赁服务器,提供开放API接口调用模型进行识别。客户端则可以多样,例如开发小程序,APP或网页,使农户能通过使用智能手机进行病害检测。对于硬件资源更加丰富的公司,可以部署本地模型,安装固定摄像头,实时监控茶园的病害状况。这些特点确保了模型的易用性和可访问性,大大方便了茶农对茶树病害的及时诊断与管理,有利于茶园管理与茶叶生产,也为农作物病害检测领域提供了新的方法。
参考文献
191Du M J, Li X X, Cai D S, et al. In-silico study of reducing human health risk of POP residues direct (from tea) or indirect exposure (from tea garden soil): improved rhizosphere microbial degradation, toxicity control, and mechanism analysis [J]. Ecotoxicology and Environmental Safety, 2022, 242: 113910. doi: 10.1016/j.ecoenv.2022.113910.
192张洪, 张孟婷, 王福楷, 等. 4种间作作物对夏秋季茶园主要叶部病害发生的影响[J]. 茶叶科学, 2019, 39(3): 318-324.
Zhang H, Zhang M T, Wang F K, et al. Effect of four intercrops on the occurrence of major foliar diseases in summer and fall tea plantations [J]. Journal of Tea Science, 2019, 39(3): 318-324.
193边磊, 何旭栋, 季慧华, 等. 基于机器视觉的小贯小绿叶蝉智能识别的研究与应用[J]. 茶叶科学, 2022, 42(3): 376-386.
Bian L, He X D, Ji H H, et al. Research and application of intelligent identification of Empoasca onukii based on machine vision [J]. Journal of Tea Science, 2022, 42(3): 376-386.
194Yang N, Yuan M F, Wang P, et al. Tea diseases detection based on fast infrared thermal image processing technology [J]. Journal of the Science of Food and Agriculture, 2019, 99: 3459-3466.
195杨奉水, 王志博, 汪为通, 等. 人工智能识别茶树病虫害的应用与展望[J]. 中国茶叶, 2022, 44(6): 1-6.
Yang F S, Wang Z B, Wang W T, et al. Application and prospect of artificial intelligence identification of tea Pests and diseases [J]. China Tea, 2022, 44(6): 1-6.
196Liu Q, Zhang Y, Yang G. Small unopened cotton boll counting by detection with MRF-YOLO in the wild [J]. Computers and Electronics in Agriculture, 2023, 204: 107576. doi: 10.1016/j.compag.2022.107576.
197Nath M, Mitra P, Kumar D. A novel residual learning-based deep learning model integrated with attention mechanism and SVM for identifying tea plant diseases [J]. International Journal of Computers and Applications, 2023, 45: 471-484.
198Sun Y Y, Jiang Z H, Zhang L P, et al. SLIC_SVM based leaf diseases saliency map extraction of tea plant [J]. Computers and Electronics in Agriculture, 2019, 157: 102-109.
199林彬彬, 邱新法, 何永健, 等. 茶树病害智能诊断识别算法研究[J]. 江苏农业科学, 2019, 47(6): 85-91.
Lin B B, Qiu X F, He Y J, et al. Research on Intelligent diagnosis and recognition algorithm of tea tree diseases [J]. Jiangsu Agricultural Sciences, 2019, 47(6): 85-91.
200Yin C H, Zeng T W, Zhang H M, et al. Maize small leaf spot classification based on improved deep convolutional neural networks with a multi-scale [J]. Agronomy, 2022, 12: 906. doi: 10.3390/agronomy12040906.
201孙道宗, 刘欢, 刘锦源, 等. 基于改进YOLOv4模型的茶叶病害识别[J]. 西北农林科技大学学报(自然科学版), 2023, 51(9): 145-154.
Sun D Z, Liu H, Liu J Y, et al. Tea Disease Recognition Based on Improved YOLOv4 Modeling [J]. Journal of Northwest A&F University (Nature Science Edition), 2023, 51(9):145-154.
202Xue Z Y, Xu R J, Bai D, et al. YOLO-Tea : a tea disease detection model improved by YOLOv5 [J]. Forests, 2023, 14: 415. doi: 10.3390/f14020415.
203叶荣, 马自飞, 高泉, 等. 基于改进YOLOv5s-ECA-ASFF算法的茶叶病害目标检测[J]. 中国农机化学报, 2024, 45(1): 244-251.
Ye R, Ma Z F, Gao Q, et al. Tea disease target detection based on improved YOLOv5s-ECA-ASFF algorithm [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(1): 244-251.
204Bao W X, Zhu Z Q, Hu G S, et al. UAV remote sensing detection of tea leaf blight based on DDMA-YOLO [J]. Computers and Electronics in Agriculture, 2023, 205: 107636. doi: 10.1016/j.compag.2023.107637.
205Soeb J A, Jubayer F, Tarin T A, et al. Tea leaf disease detection and identification based on YOLOv7 (YOLO-T) [J]. Scientific Reports, 2023, 13(1): 6078. doi: 10.1038/s41598-023-33270-4.
206Chen J Y, Liu H, Zhang Y T, et al. A multiscale lightweight and efficient model based on YOLOv7 : applied to citrus orchard [J]. Plants, 2022, 11: 3260. doi: 10.3390/plants11233260.
207Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection [C]//IEEE. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 779-788.
208Wang C Y, Bochkovskiy A, Liao H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors [C]//The Institute of Electrical and Electronics Engineers. 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver: IEEE, 2023: 7464-7475.
209Liu R, Lehman J, Molino P, et al. An intriguing failing of convolutional neural networks and the CoordConv solution [J]. Advances in Neural Information Processing Systems, 2018, 31: 1-12.
210Zhang H T, Tian M, Shao G P, et al. Target detection of forward-looking sonar image based on improved YOLOv5 [J]. IEEE Access, 2022, 10: 18023-18034.
211IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, WA, USA: IEEE, 2020: 11534-11542.
212Ni H J, Shi Z W, Karungaru S, et al. Classification of typical pests and diseases of rice based on the ECA attention mechanism [J]. Agriculture, 2023, 13: 1066. doi: 10.3390/agriculture13051066.
213Xu C, Wang J W, Yang W, et al. Detecting tiny objects in aerial images: a normalized Wasserstein distance and a new benchmark [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 190: 79-93. doi: 10.1016/j.isprsjprs.
2022.06.002.
214Wang J W, Xu C, Yang W, et al. A normalized gaussian Wasserstein distance for tiny object detection [J]. arXiv preprint arXiv:2110.13389, 2021: 1-12. doi: 10.48550/ arXiv.
2110.13389.
215Song G L, Liu Y, Wang X G. Revisiting the sibling head in object detector [C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, WA, USA: IEEE, 2020: 11563-11572.
216Wu Y, Chen Y P, Yuan L, et al. Rethinking classification and localization for object detection [C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, WA, USA: IEEE, 2020: 10186-10195.
217Meng C X, Wang Z N, Shi L, et al. SDRC-YOLO : a novel foreign object intrusion detection algorithm in railway scenarios [J]. Electronics, 2023, 12: 1256. doi: 10.3390/electronics12051256.
218Li G B, Shi G L, Jiao J. YOLOv5-KCB : a new method for individual pig detection using optimized K-means, CA attention mechanism and a Bi-directional feature pyramid network [J]. Sensors, 2023, 23: 5242. doi: 10.3390/s23115242.
219Xue J L, Cheng F, Li Y Q, et al. Detection of farmland obstacles based on an improved YOLOv5s algorithm by using CIoU and anchor box scale clustering [J]. Sensors, 2022, 22: 1790. doi: 10.3390/s22051790.
猜你喜欢
软件(2016年4期)2017-01-20
作文成功之路·教育教学研究(2016年11期)2017-01-14
未来英才(2016年13期)2017-01-13
科教导刊·电子版(2016年28期)2017-01-10
合作经济与科技(2017年1期)2017-01-03
考试周刊(2016年99期)2016-12-26
文学教育·中旬版(2016年11期)2016-12-19
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年5期)2016-04-14
科技视界(2016年4期)2016-02-22
