一种基于STM32单片机的手部运动机能康复训练系统设计
2024-06-03 10:20:00陆薇谭英丽王文君樊劲辉
现代信息科技 2024年5期
关键词:动作示范
陆薇 谭英丽 王文君 樊劲辉
收稿日期:2023-07-15
基金项目:2020年河北省高等学校科学研究项目(Z2020126);2022年河北省大学生创新创业训练计划项目(S202210082063)
DOI:10.19850/j.cnki.2096-4706.2024.05.013
摘 要:针对脑卒中等疾病引起的手部运动机能减退以及由于长期活动不畅可能导致肌肉萎缩甚至手部功能逐步丧失问题,提出一种基于STM32单片机的手部康复训练系统,该系统由运动辅助训练模块和康复训练动作示范模块组成。STM32处理器通过设定、保存并记录一个训练周期的康复示范动作全过程,并由带高精度编码器的直流伺服电机配合减速器完成各关节设定动作的执行。利用所提出的从动式康复训练方法,经过阶段性训练,可以在一定程度上保持或者增强手部各关节的运动机能,达到防止肌肉萎缩或关节功能退化等问题的产生,有效提升手部功能康复的效果。
关键词:运动机能减退;手部康复;辅助训练;动作示范;从动式康复训练
中图分类号:TP368 文献标识码:A 文章编号:2096-4706(2024)05-0059-05
Design of a Hand Movement Function Rehabilitation Training System Based on STM32 Single-Chip Microcomputer
LU Wei1, TAN Yingli1, WANG Wenjun2, FAN Jinhui2
(1.Shijiazhuang Medical College, Shijiazhuang 050599, China;
2.Hebei University of Science and Technology, Shijiazhuang 050018, China)
Abstract: A hand rehabilitation training system based on STM32 Single-Chip Microcomputer is proposed to address the issue of hand movement dysfunction caused by moderate stroke and the possibility of muscle atrophy or even gradual loss of hand function due to long-term poor activity. The system consists of a motion assistance training module and a rehabilitation training action demonstration module. The STM32 processor sets, saves, and records the entire process of rehabilitation demonstration actions for a training cycle, and is executed by a DC servo motor with a high-precision encoder in conjunction with a reducer to complete each joint setting action. By utilizing the proposed passive rehabilitation training method and undergoing phased training, it is possible to maintain or promote the motor function of various joints in the patient's hand to a certain extent, thereby preventing muscle atrophy or joint function degradation, and effectively improving the effectiveness of hand function rehabilitation.
Keywords: movement dysfunction; hand rehabilitation; assistance training; action demonstration; passive rehabilitation training
0 引 言
近年來,随着中国经济和社会的快速发展,中国人口结构发生了明显的变化,开始逐渐步入老龄化社会。在老年人群体中,脑卒中等疾病的发病率非常高,且患病后由于脑卒中或其他并发症等导致的患者手部运动功能退化、甚至手部运动机能丧失的比例也相对较大[1,2]。另一方面,随着我国工业化进程的加快和规模扩大,由于各类交通事故、工业现场不规范操作等导致的肢体伤残,尤其是手部伤残的比例也在不断上升。在脑卒中患者或者外部原因导致的肢体机能受损者中,手部运动机能下降或者部分功能丧失人数可观,因此,手部康复训练设备的市场需求也在日益增加。
对于手部康复训练而言,手指和手腕关节的康复是手部运动机能治疗和恢复过程中最关键的环节[3]。研发手部运动机能康复训练设备的主要目的,就是通过有计划的增加手部各关节单位时间的运动量、适度增加运动频次,逐步改善和提升手指、手腕和相关肌肉的活力和耐力,在促进血液循环的同时,改善手部神经感知机能和关节、肌肉的运动机能。手指、手腕关节及手部肌肉机能的康复训练系统,广泛适用于各种疾病或外部原因导致的手指关节功能障碍患者、手部肌肉功能障碍患者、手术后上肢手指功能需康复患者等人群。因此,手部康复训练设备在医疗机构、社区医院、养老院、康复机构等行业均有大量的社会和市场需求,并已经逐步成为普及型的理疗康复产品[4,5]。
1 系统总体设计方案
在手部康复训练系统的总体设计上,其核心是康复训练功能模块,另外,系统还配备了康复训练的示教手套模块,该模块可以配合康复训练功能模块,完成示教式的康复动作示范,并保存示教的参数,以供康复训练者按照示教的过程和运动强度进行康复训练。
1.1 康复训练主模块设计
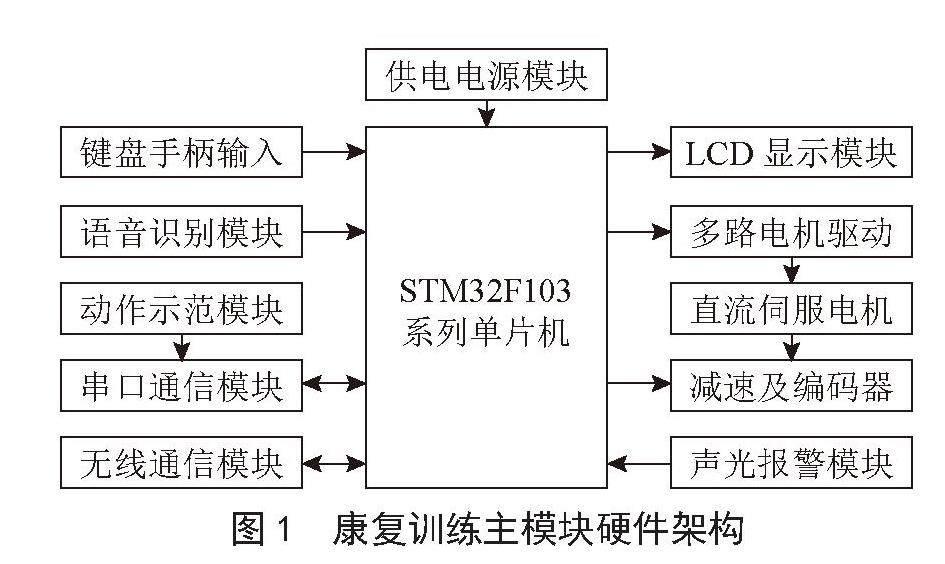
手部运动康复训练设备的相关研究和设计较多[6-8],在综合考虑主要功能与技术参数的基础上,系统主模块在控制架构的设计上,进行了如下的几个功能模块的划分主要包括:1)STM32F103系列单片机为系统的主控单元模块;2)多路电机驱动实现对电机或舵机的驱动单元;3)直流伺服电机或舵机作为预设动作的执行机构模块;4)编码器用于电机或舵机输出的速度检测;5)减速器实现直流伺服电机转速输出与关节驱动之间的速度与力矩转换;6)供电电源模块2个,分别实现主控单片机模块供电和驱动设备供电;7)串口通信模块和无线通信模块,分别用于有线和无线输入的两种不同的人机交互接口;8)语音输入与识别模块,可实现对语音动作指令的识别与执行;9)键盘及手柄输入接口、功能设定及显示报警模块等,分别作为常规的参数输入方式和信息的显示与提示等。康复训练的主模块硬件架构、各功能模块之间的物理连接关系及电路逻辑关系,如图1所示。
图1 康复训练主模块硬件架构
在图1中,对于手部各关节康复的运动训练的参数设置,可以选择语音输入、动作示范手套输入,或者也可以选择键盘手柄输入等多种输入方式。系统提供的多种训练参数人机交互设置方式中,用户可以进行定制化的功能套件选配,其优势主要在两方面:首先,适度选配可以在一定程度上节约和降低成本,减小系统输入模式的冗余度;其次,考虑到手部康复训练者自身的行动能力和手部运动能力受限的实际,选择适合训练者自身的参数设置方式,可以最大程度上提升系统的可用性和易用性,在产品化时有利于扩大康复训练者的受众范围,从而提升产品的适用对象范围和产品竞争力。
1.2 康复训练示教手套模块设计
康复训练动作示教手套模块,同样采用STM32为控制核心,结合外围功能电路,并配合机械结构设计模块而共同搭建组成。该模块的功能相对独立,可以在训练模式设定为示教手套设定的前提下,借助示范手套捕获手部各关节的动作实时信息,并进行运动关键点的记录和保存。其中,数据信息主要包括动作幅度以及速度变化等参数,并系统中的有线和无线通信方式,与康复训练主控模块之间建立信息交互。手部各关节的信息以实时或离线通信方式,传输给主控模块后,完成对训练动作细节的关键参数设定,可避免由于参数设置不当导致的对患者在康复训练过程中造成二次伤害等问题。其中的动作示教模块硬件结构,如图2所示。
图2 康复训练示教模块硬件架构
2 硬件模块设计
2.1 主控芯片供电电路
考虑到手部康复设备的使用环境,单独为系统的主控芯片以及外围功能电路设计了独立的供电电源,这样可以最大限度地确保主控芯片的稳定运行,并且使系统的供电电压不受负载电机或舵机的启停的影响,从而避免系统供电电源电压出现大幅波动。在供电电路模块中,MP1584是高性能的降压开关转换器,其开关频率在100 kHz到1.5 MHz之间调节。在输入电压范围为4.5~28 V时,其输出的供电电压可根据需要在规定的范围进行调整。另外,MP1584芯片其内部自带欠压锁定和热关断功能,能有效提高芯片的稳定运行能力。主控模块供电电路如图3所示。
2.2 伺服电机供电电路
为确保驱动关节的直流伺服电机在系统的运行过程中,系统中的直流伺服电机或者舵机等执行机构,在运行时,尤其是电机或舵机的启停时,其产生的电流冲击不对主控单片机和其他关键芯片等供电造成波动,故采用直流伺服电机独立供电模式。供电电压采用了XL4015作为DC-DC降压开关电源,在输入端可在8~36 V的宽电压范围输入,输出电压在1.25~
32 V之间可调。为降低实验成本,样机中采样舵机代替了直流伺服电机。该电源模块电路如图4所示。
2.3 主控模块
根据手部康复设备的功能需求,选择STM32F103C8T6单片机作为康复训练系统及动作示教系统的控制器,其I/O接口丰富,能满足系统的输入输出数量要求。另外,STM32系列单片机具有数据处理功能强大、运行的工作频率高的特点,能充分满足手部康复训练系统在实时性、安全性和可靠性方面的技术指标要求。主控模块部分的硬件电路,以STM32单片机最小系统为核心,主要包括外部晶振、复位电路及电源上电指示等。将主控模块与外围的数据采集检测以及控制电路等功能结合,能夠完全满足系统的功能需求。最小系统电路如图5所示。
2.4 串口通信电路
STM32系列单片机支持USART接口传输数据,能够满足系统与上位机通信或其他功能模块进行数据通信,或者利用上位机进行单片机的程序下载、上传或调整下位机程序的参数等操作。串口通信方式属于传统的通信方式之一,其传输数据具有所需的接线少、数据传输距离长且扩展方便等优点,因此在工业领域得到了广泛应用。但现有计算机在预留的接口形式中,包括串口的品牌和型号均较少,而提供较多的是常用的是USB接口形式。因此,为了提高系统连接上位机进行通信的便利性,设计了数据通信转换功能模块,即将串口通信转USB通信形式。USB转串口通信电路如图6所示。
图6 串口通信转换电路
2.5 Wi-Fi无线通信模块
为便于在设计过程中进行调试,同时提升与康复训练动作示教模块之间进行通信,系统设计了基于Wi-Fi的无线通信模块。Wi-Fi采用芯片ESP12F为核心设计了一个完整的Wi-Fi解决方案。该芯片的Wi-Fi无线通信功能,既可以作为主机独立运行,也可以作为从机附属运行,服务于其他主机实现物联网连接。该芯片的外围电路设计具有接线简单、可靠性高等特点,并且无线通信的数据传输效率也可得到充分保障,提升了网络通信的实时性和可靠性。Wi-Fi无线通信模块的电路如图7所示。
图7 Wi-Fi无线通信电路
2.6 关节驱动电路
手部动作主要包括五指屈伸、手腕的旋转及屈伸,合计7个自由度,设计7个直流伺服减速电机作为驱动设备,控制手部对应关节的屈伸或旋转运动。为了确保在康复训练过程中的运行安全性和可靠性,通过在机械结构上增加物理限位机构,使手指或手腕关节的弯曲角度限定在规定的范围内,提升了系统运行的安全性,在最大程度上避免异常情况或设置错误导致对使用者造成二次伤害。此外,为降低试制成本,在设计样机实物时,选用了舵机替代直流伺服电机,提供低成本的动力驱动设计方案,而伺服电机的驱动控制方案,可作为用户定制化的高配版本产品。选择STM32的PWM输出端口实现对舵机或直流伺服电机的转速驱动单元,通过定时器结合PWM输出实现控制舵机的转速的目的[9]。驱动电路如图8所示。
图8 舵机驱动电路
3 软件程序设计
3.1 主控模块程序设计
主程序将手部各关节的基本动作控制与数据获取等操作,均设定在循环流程中,通过读取标志寄存器中的控制方式标志位,根据条件判断并选择使用何种外部参数读取和系统参数的设定方式。在选择外部参数设定方式的前提下,对应的外部指令根据条件调用舵机运动控制子程序,实现按预定的设定方式进行各关节动作的逻辑控制。主程序流程图如图9所示。
图9 主控模块程序流程图
3.2 无线通信程序设计
无线通信用于主控模块与示教模块或者上位机之间进行数据信息的通信等功能,主要目的是确保信息能够在主模块与其他模块或上位机之间进行可靠的数据传输。其中,设计的语音识别模块[10],可依据语音执行指定的康复训练基本动作。无线通信程序的流程图如图10所示。
图10 无线通信程序流程图
3.3 舵机驱动控制程序
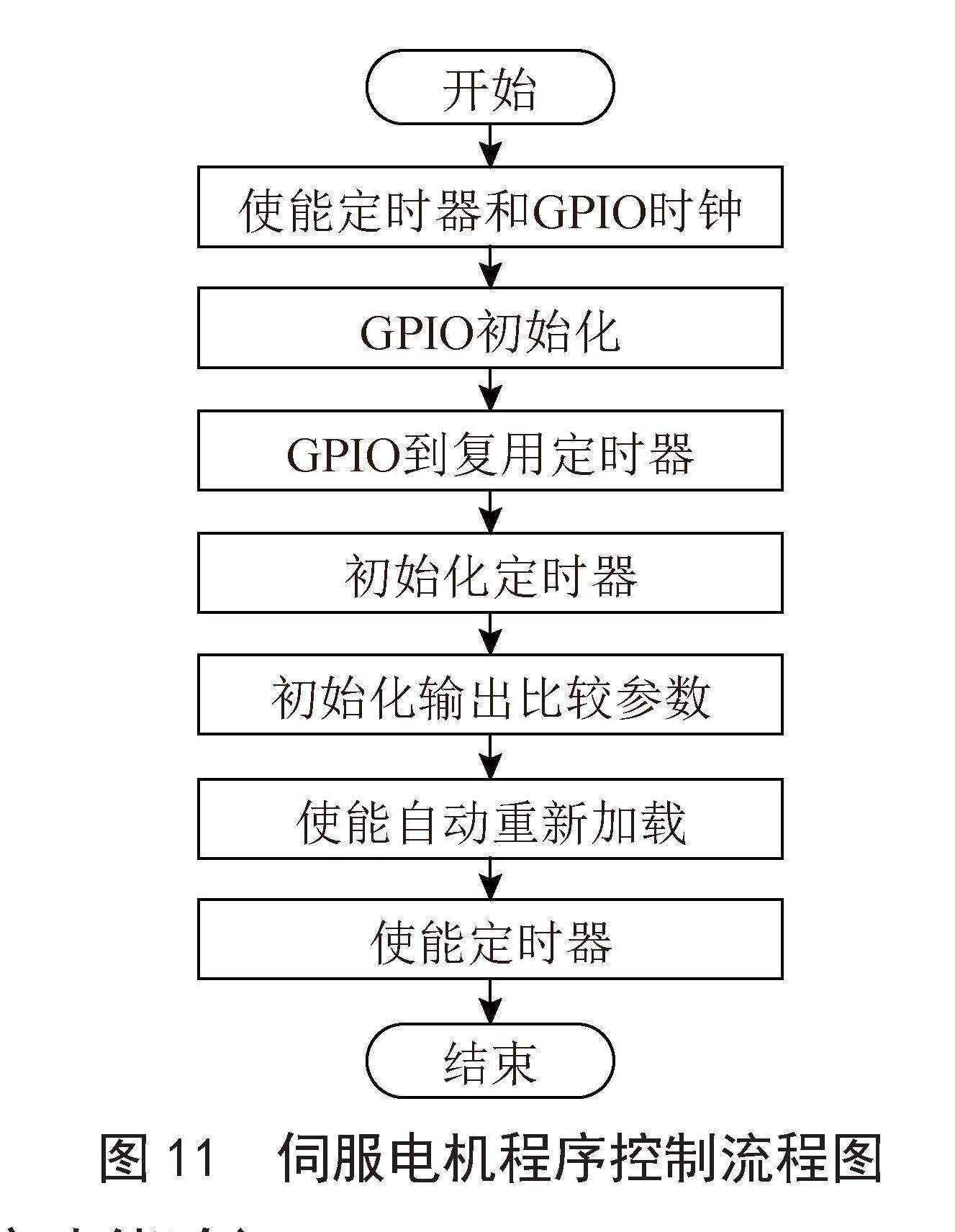
舵机的驱动控制程序主要是通过STM32单片机的GPIO信号输出端口进行多路的PWM波形输出控制。舵机的动作控制与系统定时器相结合,通过高低电平保持时间计算后,在输出端口得到所需的PWM输出波形,从而实现对舵机的旋转角度和速度进行控制。其中对舵机的控制程序流程,如图11所示。
图11 伺服电机程序控制流程图
3.4 系统功能验证
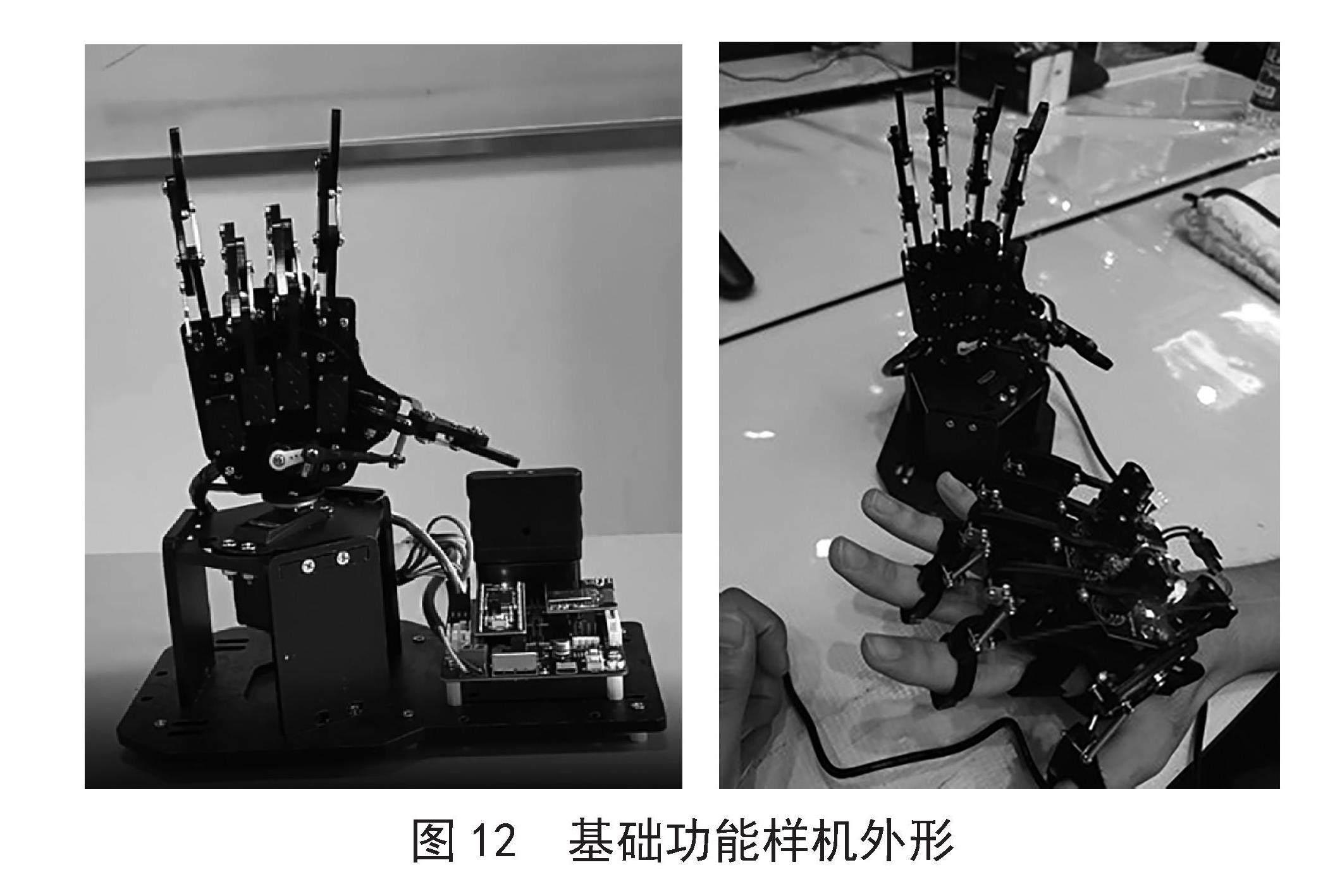
根据手部康复训练系统的功能设计要求,完成了样机基础功能的设计,如图12所示。在设计的样机平台上,对手部康复的所有设计功能均在平台上进行了验证。设计的康复训练主控模块、康复训练示教手套模块功能,以及有线和无线通信功能等,也均在平台上进行了逐一验证。在样机上,使用者能够通过选择采用同步示教手套的训练模式,或选择提前存入的示教动作模式,进行手部关节动作的康复训练参数设定,康复训练的控制精度等各项性能和技术参数等均达到了预期的设计要求。上述的实验结果表明,所提的结构和功能设计均能够满足用户的手部康复训练实际需求,康复训练效果良好。
图12 基础功能样机外形
4 结 论
设计了一种基于STM32系列单片机的手部康复训练系统,能够选择通过预先设定动作参数、示教动作预先录入或者实时同步示教与训练三种不同的康復训练的参数设置方式,实现对各种原因造成的手部运动机能下降人群实施有效的康复训练。最后,设计了能够满足康复训练的精度和可靠性要求的样机,进行了设计功能的验证。实验结果进一步表明,所设计的手部康复训练系统性价比较高,且能够满足用户的康复训练需求,在一定程度上缩短手部康复运动训练的周期,有效提升康复训练效果。
参考文献:
[1] 滕丽婷,谢小华,曹思敏,等.老年脑卒中病人失能影响因素的研究进展 [J].循证护理,2023,9(10):1809-1813.
[2] 童晓轩,周艳,贾献福,等.职业康复技能训练对脑卒中后就业年龄段肢体残疾患者的治疗效果分析 [J].按摩与康复医学,2020,11(13):38-40+35.
[3] 红梅.肢体残疾患者的康复护理训练研究 [J].世界最新医学信息文摘,2016,16(76):236.
[4] 郑稣鹏.适老企业创新机会形成与创新影响机理研究 [D].大连:大连理工大学,2021.
[5] 王开放,曹慧,邢蒙蒙,等.康复外骨骼机器人在肢体康复中的应用进展 [J].机械传动,2022,46(4):10-21.
[6] 徐文超,沈雪,张峰,等.一种可拆卸式手功能康复训练器的设计 [J].医疗装备,2022,35(9):29-32.
[7] 戴欢,李嘉濠,杨圣奥,等.手部康复训练示教手套的设计与实现 [J].工业控制计算机,2021,34(10):38-40.
[8] 葛伟,宋爱国,赖健伟.具有手指外展辅助功能的康复机器人系统 [J].测控技术,2023,42(4):75-81.
[9] 杨蒙蒙,邓三星,李帅,等.基于STM32单片机的双足竞走机器人设计 [J].物联网技术,2022,12(5):123-126.
[10] 吴云龙,程武山.基于STM32的语音识别机械手智能系统设计 [J].单片机与嵌入式系统应用,2020,20(1):37-41.
作者简介:陆薇(1979.07—),女,汉族,河北定州人,副教授,本科,研究方向:智能康复医疗与医学影像设备。
猜你喜欢
文山学院学报(2019年6期)2019-12-27 11:20:33
今日财富(2018年2期)2018-05-14 21:18:18
山东工业技术(2017年11期)2017-06-13 13:34:22
读写算·教研版(2016年19期)2017-04-17 14:11:27
体育时空(2016年12期)2017-04-14 21:24:42
艺术评鉴(2016年19期)2016-12-24 08:57:59
中学课程辅导·教学研究(2016年14期)2016-12-23 17:48:32
体育教学(2016年10期)2016-12-01 00:15:05
读写算·教研版(2016年9期)2016-05-07 20:46:44
小学教学参考(综合)(2015年1期)2015-01-27 16:30:07