
成山角水域动态自适应自主航行决策方法
2024-01-01 08:12贺益雄于德清刘霄王丰牟军敏
哈尔滨工程大学学报 2023年10期
贺益雄,于德清,刘霄,王丰,牟军敏
(1.武汉理工大学 航运学院,湖北 武汉 430063;2.武汉理工大学 内河航运技术湖北省重点实验室,湖北 武汉 430063)
为减少船舶碰撞事故,在复杂水域设置分道通航制实现单向通行。成山角分道通航制是国内最早在国际海事组织备案的,具有较好典型性,但该水域仍发生过多起人为因素造成的船舶碰撞事故。智能船舶近年来发展迅速,自主航行[1-2]是其核心模块,能根据海上环境进行避碰和跟踪航线,减少人为因素导致的事故,保障航行安全。实现自主航行需要识别航行风险,按照《1972 年国际海上避碰规则》(简称“避碰规则”)和良好船艺要求,符合船舶操纵性地进行决策。
文献[3-4]利用模糊理论研究碰撞危险度。文献[5-6]基于神经网络方法研究碰撞危险度。文献[7]提出了以时间和空间碰撞危险度合成的碰撞危险度模型。碰撞危险判断后,需要合理做出避碰决策。文献[8-9]应用势场理论来解决船舶避碰问题,但不能很好地结合避碰规则和良好船艺的要求。深度强化学习算法也用来解决船舶避碰问题,但耗时多[10-11]。文献[12-13]结合速度障碍理论解决船舶避碰问题,生成不同情形下的操纵方案,但仅适用于开阔水域。文献[14]总结了船舶速度矢量与安全避让间的规律,对避碰方法进行了研究。文献[15]通过局面、阶段划分,研究了各阶段自动避碰行动,提出了开阔水域符合避碰规则和良好船艺要求的自主航行模型。
现有自主航行研究集中于开阔水域,较少考虑成山角等特殊水域。尚未针对分道通航制水域建立适用的数字化交通环境模型,融入避碰规则第10条和良好船艺要求探究避碰机理。因此亟待深入研究该类水域自主航行方法。
通过构建动静态数字环境,结合比例积分微分(proportion integration differentiation,PID)和数学矩阵方程组(mathematical modeling group,MMG)建立船舶运动控制模型推演船舶的非线性操纵运动,结合航线跟踪方法构建自动航行模型。引入船舶领域和基于船舶行为的船位推算方法,量化解析避碰规则,将目标船分类,确定不同局面下的避让要求。研究自动航行模型和避让要求约束条件下的动态避碰机理,设计时序滚动决策框架,提出自适应目标船机动和剩余误差的自主航行决策方法。
1 基于时序滚动的自主航行方法框架
和开阔水域类似[16],分道通航制水域的自主航行系统误差来源于:本船运动模型,控制参数误差和态势感知误差(含风浪流、目标和本船态势数据误差)。可依靠提高传感器精度,选用合适船舶运动数学模型提高适应性,根据先验知识和收敛性准则优化控制器参数补偿系统误差。但误差仍无法完全消除,未消除的定义为剩余误差。此外,成山角分道通航制水域目标船数量和种类多,和本船的会遇态势多变,可能发生不协调避碰且极难预测。为自适应目标船不可预测的机动操纵、自校正剩余误差,可设计信息时序滚动输入、快速更新的自适应反馈校正计算框架,实现自主航行方案决策,如图1所示。其步骤如下:

图1 自主航行实现流程Fig.1 Diagram of autonomous navigation
1)构建动、静态数字化交通环境;
2)输入本船、目标船信息;
3)通过基于船舶行为的船位推算方法判断是否存在碰撞风险。存在则基于限制条件下的避碰机理确定避碰方案。不存在则根据本船和计划航线相对位置判断是否需要跟踪航线。需要则根据航线跟踪方法计算改向角并确定跟踪航线是否安全,否则保持当前航向;
4)执行操纵方案;
5)更新信息重复步骤2)、3)和4)。
可暂时不考虑距离太远、离进入本船船舶领域时间长的目标船,当目标距离小于阈值Dd时才进行船位推算。Dd可由船长确定,暂取10 n mile。
2 数字化交通环境
2.1 坐标系转换与船舶领域模型
以(λ0,φ0)为原点建立坐标系XOY,X、Y轴正向指向正东、北。以本船重心为原点建立坐标系xoy,x、y轴正向指向右正横、船艏,如图2。2个坐标系转换关系为:
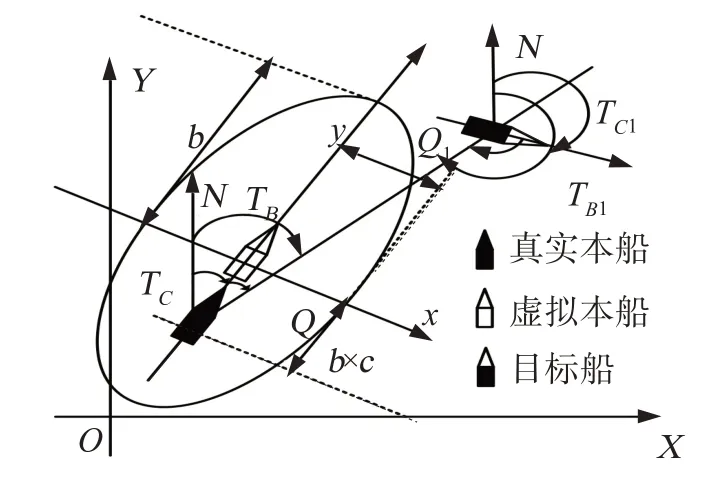
图2 坐标系转换与船舶领域Fig.2 Coordinate system transformation and ship domain model
式中:(X,Y)、(x,y)为某点XOY、xoy坐标;(X0,Y0)为本船重心XOY坐标;A为转换矩阵;
式中TC为本船航向。
船舶领域是船舶周围存在的禁止他船进入的区域[17]。根据避碰规则、良好船艺以及分道通航制的特殊要求,采用如图2 的偏心船舶领域模型。模型中的各种参数大小可由船长根据航行环境和船舶特性选定。研究中,根据几位船长的经验和多次实验结果,取a=2L,b=5L,c=0.3,L为船长。
图2 中,TB和Q为本船看向目标船的真方向和舷角;TC1为目标船的航向,TB1和Q1为目标船看向本船的真方位和舷角。
2.2 分道通航制水域数字化
2.2.1 分道通航制水域数字化通用模型
分道通航制是应用最广泛的船舶定线措施之一,用分隔带/线、明显的地理物标等将航道分隔成左右2 个通航分道,实行单向通航。根据自主航行感知水域交通环境的需求,将分道通航制水域要素分为:通航分道、计划航线、隔离带、警戒区、避航区、沿岸通航带等。
某分道通航制水域共包含M个分道通航制,每个分道通航制包含N个通航分道和D条边界线,每条边界线含有E个点。构成通航分道的2 条边界线的点数量相等,若不相等,则增加构成点使其相等。分道通航制、通航分道、边界线、边界线包含的点、通航分道划分的航段按由东向西、由北向南依次编号。
第m个分道通航制的d条边可由向量Lmd表示为:
式中Fmde为第m个分道通航制的第d条边上的第e个点。
第m个分道通航制的n个通航分道可由Tmn表示为:
式中n与d的对应关系为d=2n-1。
连接通航分道2 条边界线上点连线的中点,构成计划航线。Lmn为第m个分道通航制的第n个通航分道上的计划航线:
式中Pmne为第m个分道通航制的第n个通航分道的2条边界线上第e对点连线的中点。
根据通航分道中船舶位置和流向的不同,将某个通航分道划分为I个航段,Gmni为第m个分道通航的第n个通航分道上的第i个航段:
第m个分道通航制可表示为Km:
警戒区、隔离带、避航区和沿岸通航带等特殊区域可数字化为:
式中:R0为规则圆形;(x,y)、r为区域圆心、半径;θ为参数;Qt为其他形状;P为组成该区域的点,j为点的数量。若区域为规则圆形,如式(8);若为其他形状,可由多个点的连线表示,如式(9),点可根据具体水域环境选取。
自主航行过程中,自动获取船舶所在通航分道的信息。Emn表示第m个分道通航制的第n个通航分道的构成要素:
式中n与d的对应关系为d=2n-1。
矩阵Emn的第1、3 行表示通航分道的2 条边界线;第2 行中Pmne为第1、3 行上对应点连线的中点,Gmni为由对角4个点Fmde的连线围成的航段。
2.2.2 以成山角分道通航制水域为例
将上述分道通航制数字化通用模型应用到成山角分道通航制水域中,M=3,N=2,D=4。当m=1 时E=4,当m=2 时E=5,当m=3 时E=3,如图3。Lmd、Gmn、Lmn、Omni、Km和Emn均可用通用模型表示。Pq为第q个警戒区:

图3 成山角水域数字化Fig.3 Digitization of Chengshanjiao waters
Sw为第w个隔离带:
式中:(X1,Y1)、R分别为警戒区P1中心、半径;θ为参数;Q为分隔带上的点,如图3。
2.3 目标分类与避让要求
将在分道通航制中行驶的船舶分为顺、不顺交通流方向航行的船舶。如按船舶种类,可分为普通机动船和特殊船舶(含渔船、帆船、非机动船、操限船和失控船等)。
本船为在分道通航制中按交通流方向行驶机动船,按照避碰规则第18 条,应尽早避让特殊船舶。对于机动船,根据分道通航制水域的特点,按照会遇局面确定两船的避让关系为:
追越局面:本船为追越船,向安全追越改向幅度小的方向避让;本船为被追越船,开始阶段应保向保速,若让路船一直没有按避碰规则采取让路行动,可从安全通过改向幅度小的方向避让。
对遇局面:向右转向。潜在碰撞危险(potential collision risk,PCR)[15]是指若本船和目标船保向保速,某一时刻目标船会进入本船船舶领域,分道通航制水域中保向的含义包含船舶顺交通流方向改向。如本船距离通航分道边界线小于2倍船长或继续向右避让违反规定,存在PCR 但碰撞危险尚未形成也可向左避让,但碰撞危险形成后,只能向右避让。
交叉相遇:本船是让路船时,应采取尽可能大幅度的右转且避免横越直航船船艏;本船是直航船时,在碰撞危险开始的阶段应保向保速,若让路船一直没有按避碰规则采取让路行动,右转避让。
3 自主航行决策
自动航行是指在无移动物标的环境中,本船沿着计划航线航行。自主航行方法是指基于自动航行模型,能考虑避碰规则和良好船艺避让移动物标,并沿计划航线采取最优方案航行的方法。
3.1 自动航行模型
自动航行模型由航向控制系统和航线跟踪方法组成,航向控制系统包括船舶操纵运动模型和航向控制方法。航线跟踪方法根据计划航线和本船当前位置确定目标航向,由航向控制系统控制船舶转向过程。
3.1.1 航向控制系统
研究中,不需考虑船舶的纵摇、垂荡、横摇,良好天气下可忽略风、浪、流干扰,采用三自由度MMG模型和航向控制方法模拟船舶操纵过程,计算特定改向角度下操纵过程中不同时刻的船位和经历的时间:
MMG 模型参数及符号含义可参阅文献[18]。已知本船位置、航向、航速、转速、船长等信息,可按龙格库塔方法求解MMG 方程,求得任意时刻位置、航向等信息。
船舶保向、改向操纵可采用模糊自适应PID 控制方法,通过模糊推理实时调节PID参数,实时控制舵角、调整航向[19-20],如图4。

图4 模糊自适应PID控制器Fig.4 Fuzzy adaptive PID controller
模糊控制器有2 个输入:航向偏差E和航向偏差变化率EC,3 个输出为PID 比例系数Kp、积分系数KI和微分系数Kd。利用模糊控制实时对PID 的3 个参数Kp、KI、Kd进行调节并控制船舶运动,下一时刻将实际航向返回输入端,与目标航向比较生成偏差,循环使用偏差控制航向,实现在不同航向偏差和航向偏差变化率下对PID 参数进行调整,消除前一时刻计算和预测误差,从而可以更好地控制船舶的航向。
3.1.2 航线跟踪方法
船舶沿计划航线航行时,需自动确定下一个转向点和目标航向。当船舶偏离计划航线时,应尽早恢复沿计划航线航行。本船距离计划航线距离小于150 m 且航向与所在航段交通流方向的差值小于1°时,认为船舶沿计划航线航行。
1)确定转向点。如图5,船舶所在通航分道的计划航线设有S个转向点,计算本船与S个计划航线点的距离,找出最近的计划航线点记为Ps。以Ps-1点到Ps点连线的方向为计划航迹向,计算下一时刻本船到Ps点距离与当前到Ps点距离的差值ΔD1,计算下一时刻本船到Ps-1点距离与当前到Ps-1点距离的差值ΔD2。ΔD1ΔD2为正时,Ps+1点为下一个转向点。ΔD1ΔD2为负时,若D3小于0.3 n mile,Ps+1点为下一个转向点,否则Ps为下一个转向点。

图5 航线跟踪方法Fig.5 Route tracking method
2)计算目标航向(以Ps为下一个转向点为例)。根据本船航向与计划航线方向的夹角和Ps点相对本船的真方位来确定目标航向为:
式中:m为靠拢系数,m值过大或过小都不利于本船完成航线跟踪,当m=1 时本船的运动轨迹为L1,当m>1 时本船的运动轨迹为L2,如图5;路径L2更符合实际航行中的运动轨迹,经多次实验最终m取值为1.5。
3.1.3 自动航行模型仿真实验
实验中预设船舶的计划航线为L21,模型自动提取L21所在通航分道的构成要素并进行识别。计划航线L21如图6(a),船舶实际航行轨迹如图6(b)。通过计划航线与船舶运行轨迹对比可得出:提出的自动航行模型可控制本船按计划航线航行并模拟船舶实际转向过程。

图6 航线跟踪方法仿真实验Fig.6 Simulation experiment of route tracking
3.2 避碰机理
避碰机理是指船舶运动矢量和避碰效果之间的规律[16]。通过研究分道通航制水域避碰机理,计算可让清所有目标船的最小改向角。
3.2.1 船位推算方法
分道通航制水域中,通航分道以外可能存在浅点和障碍物等碍航物标,同时防止船舶驶出边界线违反分道通航制规则,船舶应尽可能靠中心线航行。研究中在通航分道内设置位置控制边界线(距离隔离带或通航分道边界线的距离为2L)。成山角水域可航行水域较宽广且碍航物较少,船舶一般定速航行。研究中本船定速航行,并根据避碰规则第10 条合理预计所有顺交通流方向航行船舶在推荐交通流方向变化时将沿新方向航行。
顺、不顺交通流方向目标船进行船位推算为:
式中:(x0,y0)为船舶初始时刻位置;v为航速;TC为航向;αi为船舶当前所在航段的交通流方向;αi+1为下一航段的交通流方向;t1为船舶顺交通流方向航行时到达下一航段所需时间;(x1,y1)为船舶到达下一航段时的船位。
若本船在航道外时按式(16)进行船位推算。在航道内时本船按照自动航行模型推算船位,如船位到达设定的位置控制线时,向推荐的交通流方向改向,直至抵达下一个航段并沿新的推荐方向航行。
3.2.2 碰撞危险度
碰撞危险度(collision risk index,CRI)是根据两船操纵特性、位置、运动等关系所确定的反映碰撞危险是否存在和采取避让措施紧迫程度的物理量。可分解为空间碰撞危险度(space collision risk index,SCRI)和时间碰撞危险度(time collision risk index)[21]:
式中:u为CRI 的 值;ut为TCRI 的 值;us为SCRI的值。
定义分道通航制水域中碰撞危险形成条件为:存在潜在碰撞危险且到目标船进入本船船舶领域的时间Tis小于Tt,Tt可由船长确定,研究中取1 800。
1)空间碰撞危险度。
SCRI 表示两船是否存在PCR,目标船与本船SCRI为:
式中:(X t k,Y tk)为第k艘目标船在t时刻的船位;Dm表示本船船舶领域内的点集;∄表示不存在。
2)时间碰撞危险度。
TCRI是指存在碰撞危险两船采取避让措施紧迫程度的物理量。在分道通航制水域中,定义TCRI为表示目标船进入本船船舶领域紧迫程度的物理量:
式中Tis为目标船进入本船船舶领域的时间。
根据避碰规则第16、17 条的要求。研究中,本船与目标船构成碰撞危险时(u>0),本船为让路船时应立刻采取避碰行动。本船为直航船时,若让路船一直没有按避碰规则采取让路行动且u>0.2,本船可以采取避碰行动。
3.2.3 可行避让幅度求取
若存在PCR 或碰撞危险,按照3.2.2 节模型,确定CRI需要采取的避让行动和幅度,步骤如下:
1)计算SCRI。对本船和距离小于Dd的目标船进行一定时长(暂定2 400 s)的船位推算,若目标船进入本船船舶领域,保存该目标船的信息以及进入本船船舶领域的时间。目标船是否进入本船船舶领域可判断为:
式中:TC t为本船t时刻航向;(Xt,Yt)为t时刻本船船舶领域中心位置;a和b为本船船舶领域短半轴和长半轴。将t时刻目标船位置代入计算,若成立,目标船在t时刻进入本船船舶领域。
2)若存在SCRI,根据步骤1)中保存的目标船信息计算TCRI 和CRI,判断是否存在碰撞危险,若存在,找出最危险目标船(CRI最大)。
3)根据表1 辨识会遇局面类型。第1 类:存在PCR且u>0,第2类:不存在PCR或u=0。

表1 会遇局面辨识模型Table 1 Identification model of ship encounter
4)按不同会遇局面避让要求确定改向幅度。
根据避碰规则第8 条,改向幅度不宜太小,设置初始改向角为5°。根据会遇局面确定改向方向,将改向方向、改向角和本船船位等信息输入航向控制系统中计算出船舶改向完成时刻的位置、航速、航向等信息,据此进行船位推算判断是否存在碰撞危险。若存在,以1°为间隔增大改向角,重新判断,直到找到可行改向角。若改向角达到45°仍存在碰撞危险,则认为无可行方案,如图7。若本船到达位置控制边界线,本船航向更新为当前航段交通流方向,沿航道边界航行,避免驶出通航分道造成其他航行风险。

图7 可行改向角计算Fig.7 Calculate the feasible alter angle
5)若找到可行改向角,本船开始避碰行动。
3.2.4 恢复航线跟踪
本船由于避让目标船偏离计划航线到本船恢复沿计划航线航行的过程称为恢复航线跟踪(复航),本船偏离计划航线后应当尽可能早地恢复沿计划航线航行。目标航向可通过航线跟踪方法求得。最早恢复航线跟踪时间可通过离散方法求得,自本船完成改向时起,开始判断是否能够复航。计算流程如图8。

图8 恢复航线跟踪时间计算Fig.8 Calculate time to route tracking
3.3 自主航行方法
在时变环境中,固定步长1 s 获取信息,实时判断目标船运动状态,自适应地生成自主航行方案,实现目标船机动状态下自适应自主航行。首先通过船位推算识别有碰撞危险的目标船,根据动态避碰机理求取改向角,最后确定恢复航线跟踪时间。基于MMG、模糊自适应PID 和航线跟踪等模型,以任意初始条件避让目标的自主船航行模型如图9。

图9 自主航行模型Fig.9 Autonomous navigation model
4 仿真实验与结果分析
实验中取(37°11′.60N,122°35.00E)作为XOY原点,本船和目标船初始参数如表2。
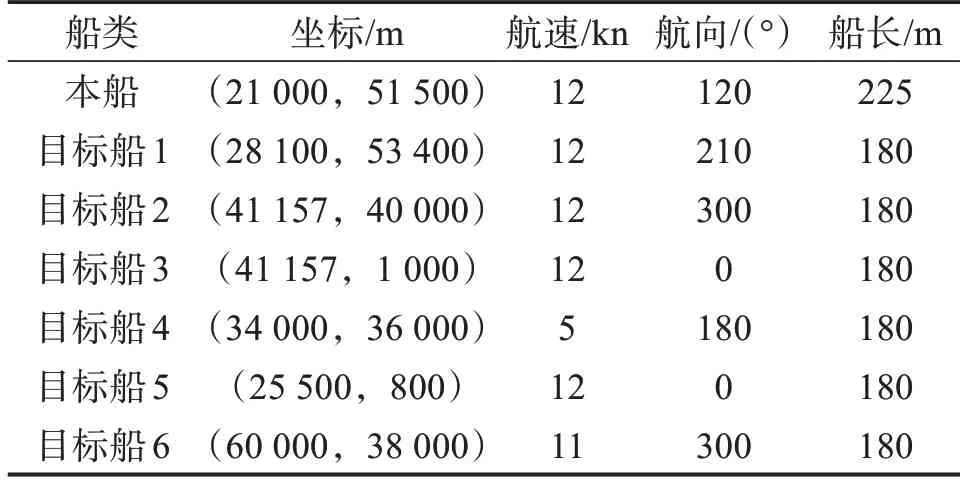
表2 船舶初始参数Table 2 Initial ship parameter
T=4 140 s,目标船5 航向更新为330°,航速更新为11 kn;T=7 601 s,目标船3 航向更新为300°,航速更新为11 kn;目标船1、目标船2、目标船4、目标船6不涉及变向变速。
本船和目标船初始位置如图10。图11 显示了仿真的开始阶段。T=0 s 时,目标船1 的碰撞危险度为0.185,目标船2 的碰撞危险度为5.98×10-6,目标船1为最危险目标船,本船与目标船1局面辨识为左舷交叉且碰撞危险度小于0.2,本船为直航船保向保速。T=31 s 时,目标船1 的碰撞危险度为0.201,目标船2 的碰撞危险度为4×10-5,目标船1 为最危险目标船,本船与目标船1 局面辨识为左舷交叉且碰撞危险度大于0.2,本船右转14°避让目标船。T=858 s时,本船开始复航。

图10 初始船位Fig.10 Ship position at initial time

图11 仿真实验过程1Fig.11 Simulation experiment procedure 1
图12显示了仿真的中间阶段,T=3 762 s时,目标船4的碰撞危险度刚好大于0,本船与目标船4局面辨识为追越局面,本船右转5°避让目标船。T=5 814 s,本船开始复航跟踪。

图12 仿真实验过程2Fig.12 Simulation experiment procedure 2
图13 显示了仿真的结束阶段,T=9 311 s 时,本船到达终点。

图13 船舶轨迹Fig.13 Ship trajectory
综上,当前操纵决策方案为:T=31 s 时,本船右转14°;T=858 s 时,本船开始复航;T=3 762 s 时,本船右转5°;T=5 814 s 时本船开始复航(1 s 时间后根据新的本船、目标船的信息重新判断,生成新的操纵方案)。
5 结论
1)本文提出的自主航行方法能动态自适应系统剩余误差和目标船随机运动,符合避碰规则与良好船艺的要求,满足在成山角水域安全航行的需求,为后续分道通航制限制水域自主航行的实现提供理论基础。
2)本文提出的自动航行模型可以控制本船按计划航线航行并模拟船舶实际运动过程。提出的自主航行方法能动态自适应系统剩余误差和目标船随机运动,符合避碰规则与良好船艺的要求,满足在成山角水域安全航行的需求,为后续分道通航制限制水域自主航行的实现提供理论基础。
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
舰船科学技术(2021年5期)2021-07-03
宁夏医学杂志(2020年4期)2021-01-21
交通信息与安全(2020年3期)2020-11-13
武汉理工大学学报(交通科学与工程版)(2020年3期)2020-07-27
中国水产(2019年9期)2019-10-16
现代消化及介入诊疗(2019年4期)2019-05-28
中国航海(2015年3期)2015-11-29
重庆交通大学学报(自然科学版)(2015年4期)2015-06-07
世界海运(2015年7期)2015-04-05
