不同会遇态势下目标船行为模拟及其特征分析
2021-07-03 07:20杨雪锋
舰船科学技术 2021年5期
杨雪锋,刘 文,徐 鹏,陈 华
(1. 重庆交通大学 航运与船舶工程学院,重庆 400074;2. 内河航运技术湖北省重点实验室,湖北 武汉430063;3. 中国交通通信信息中心 交通安全应急信息技术国家工程实验室,北京 100011;4. 海军航空大学,山东 烟台 264001)
0 引 言
按照《国际海上避碰规则》(以下简称“规则”)的要求,驾驶人员需根据目标船的行为特征,划分其与本船的会遇态势,这是确定船舶避让责任和采取避让行动的重要依据。只有明确了船舶间会遇态势,驾驶人员才能据此做出相应的避让行动[1]。无数船舶碰撞事故的经验表明,对会遇态势的认识不一致是造成船舶间避碰行动不协调,乃至碰撞的重要原因之一[2]。此外,无人船的研究已成为当前水上交通领域研究的热点[3-4],实现无人船自主航行,划分会遇态势是其必须解决的技术问题。
船舶会遇态势可分为在互见中的会遇态势和能见度不良时的会遇态势。其中,互见中的船舶又包括不同类船舶间的避让规定和机动船之间的避让规定。本文仅以互见中机动船之间会遇态势为研究对象。
《规则》第十三、十四和十五条分别定义了追越、对遇和交叉3种会遇态势。追越是指一船从他船正横后大于22.5°的某一方向上赶上他船时,应认为是在追越中,追越船应该给被追越船让路;对遇是指2艘机动船在相反或接近相反的航向上相遇,致有构成碰撞危险的一种会遇局面;交叉会遇是指两机动船在追越和对遇局面以外的航向交叉,致有构成碰撞危险的局面,此时,有他船在本船右舷的船舶为让路船。
从上述定义可以看出,《规则》并未对3种会遇态势进行严格的定义,只对其做了定性的描述,如《规则》中使用了“相反或接近相反”等模糊的概念。基于这一原因,早期研究主要集中在会遇态势的定性划分,这在避碰专家系统中尤为明显,如F.P.Coenen等[5]研发的避碰专家系统,通过专家知识库中的If-then产生式规则,将会遇态势划分为目标船从左舷向右舷穿越、目标船从右舷向左舷穿越、目标船追越本船、本船追越目标船、目标船正对本船驶来、目标船停车6种类型;王敬全等[6]提出的避碰专家系统中,将基本会遇局面划分为对遇、右交叉、左交叉、从左边追越、从右边追越和被追越6种态势。船舶会遇态势的定性划分研究基本确定了会遇态势的类型,如对遇、追越(左舷/右舷)、大角度交叉(左舷/右舷)、小角度交叉(左舷/右舷)等类型,这为后续船舶会遇态势划分方法的研究奠定了基础。
会遇态势的定量划分主要包括两类,第一类会遇态势划分方法是根据目标船的相对方位B划分会遇态势。船员在会遇态势划分时的经验表明,对遇局面与交叉会遇局面以5°舷角为分界线,交叉会遇局面与追越局面以112.5°为分界线较为合理[7-8]。以此为基础,部分研究人员对会遇态势进一步细分。武汉理工大学的朱沁根据避让行动的类型,以相对方位线6°,60°,112.5°,180°,247.5°,292.5°和354°为分界线,将会遇局面划分为11种会遇态势[9]。
第二类会遇态势划分方法除了考虑了目标船的相对方位,还将目标船与本船的航向差ΔC(目标船航向—本船航向)作为划分依据。因为,根据目标船的相对方位划分会遇态势没有考虑船舶的运动趋势[10],忽略了《规则》中“致有构成碰撞危险”的要求。为弥补不足,任亚磊[11]、肖潇[12]等利用本船和目标船的航向差ΔC来划分船舶的会遇态势,将船舶会遇局面划分为追越(ΔC<67.5°或者ΔC>292.5°)、对遇(175°<ΔC<185°)、交叉会遇(185°<ΔC<292.5°或者67.5°<ΔC<175.5°)。不难发现,目标船的相对方位和航向差都是划分会遇态势的重要依据,东昉[2]、吴春杰[13]等,综合考虑了这两方面的因素,将互见中船舶的会遇态势划分为本船追越目标船、目标船追越本船、对遇、对驶、交叉(本船为让路船)、交叉(本船为直航船)6种会遇态势。
可见,第一类会遇态势划分方法所需要的划分依据单一,数据容易获取,但没有考虑目标船的运动趋势;第二类会遇态势划分方法的特点恰好相反,考虑了目标船的运动趋势,但需要获取目标船舶的航向,用于计算航向差。
为验证上述两类会遇态势划分方法的有效性,明确相对方位和航向差与会遇态势的关系,掌握船舶在不同会遇态势下的运动特征和视觉特征变化情况,本文利用计算机模拟船舶在会遇过程中距离、方位和视觉特征变化情况,归纳不同会遇态势下,目标船的运动特征和视觉特征。
1 船舶行为模拟
在船舶行为模拟中,本船和目标船均匀速直线航行,航行过程中船舶的航向不发生变化,目标船和本船位置的变化情况计算如下:
其中:xt和yt为t时刻船舶的x坐标和y坐标,m;vt-1为t-1时刻船舶的航速,kn;θt-1为t-1时刻船舶的航向(介于0°~360°之间),(°);Δt为相邻2次船舶运动模拟的时间间隔,min,本文取Δt=0.5 min。
本船的初始位置为(x0,y0)=(0,0),航向为θorg-0=000°。
根据《规则》对船舶灯光的光力射程规定,许多学者认为海上两船大概接近到6 n mile,若两船的DCPA(distance to closest point of approach, DCPA)小于安全值,则船舶间的碰撞危险正在形成[14]。因此,在船舶运动模拟其中,初始条件下目标船与本船的距离Range取6 n mile。
本船与目标船会遇过程的行为模拟终止条件有2个:
条件1 当前模拟结果中,本船与目标船的距离大于上一次模拟结果中的距离,即本船与目标船的距离正在逐渐增大,目标船与本船的TCPA(time to closest point of approach, TCPA)为负数。
条件2 模拟次数超过最大模拟次数max_sim,本文取max_sim=200,结合相邻2次模拟的时间间隔Δt=0.5 min,200次模拟所代表的船舶会遇时间为100 min,几乎不会有船舶的会遇时间超过这个数值。
以上2个条件满足一个,则本次会遇过程模拟结束。
2 目标船行为特征分析
文献[2]系统地将机动船的会遇态势分为本船正在追越目标船、目标船正在追越本船、本船与目标船对遇、目标船在本船左舷的交叉会遇、目标船在本船右舷的交叉会遇5种类型,综合考虑了目标船的相对方位B、目标船与本船的航向差ΔC、两船之间的距离R、目标船的速度Vt和本船的速度V0等多方面的因素,对会遇态势划分较为合理。以此为基础,利用计算机模拟这5类会遇态势下典型的会遇情况,获取目标船的运动特征和视觉特征,并对其进行分析。
1)本船追越目标船
目标船与本船的初始距离为3 n mile,本船航速V0=20 kn,目标船航速Vt=15 kn,模拟结果如图1所示。
模拟结果中,图1(a)表示目标船距离R的变化情况,图1(b)表示目标船相对方位B的变化情况,图1(c)表示本船观察目标船的视角Vision-angle变化情况,该视角的变化决定了会遇过程中目标船舶的视觉特征。例如,本船追越目标船时,观察目标船的视角Vision-angle在180°左右,那么,本船的驾驶员在瞭望过程中只能从目标船的船尾方向去观察目标船。实际上,观察目标船视角Vision-angle就是以目标船的航向为基准,本船的相对方位。

图1 本船追越目标船Fig. 1 The ship overtook the target ship
从模拟结果可以看出,在本船追越目标船的初期(时间小于20 min),目标船相对方位B和观察目标船视角Vision-angle均变化较小,B从0°左右缓慢地增加,或者缓慢地减小,变化量小于40°,Vision-angle从180°左右缓慢地增加,或者缓慢地减少,变化量小于50°,本船驾驶人员首先看到目标船的尾部,然后逐渐能够看到目标船的左舷或者右舷。
2)目标船正在追越本船
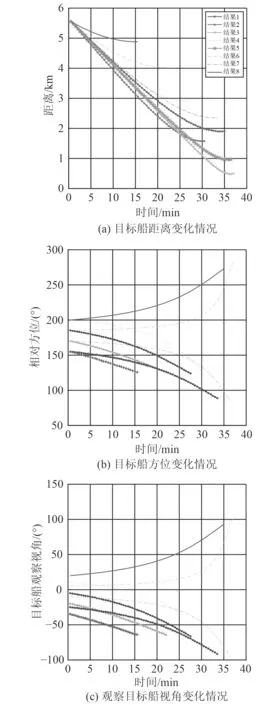
图2 目标船追越本船Fig. 2 The target ship overtook the ship
目标船与本船的距离为3 n mile,本船航速V0=15 kn,目标船航速Vt=20 kn,模拟结果如图2所示。从模拟结果可以看出,此时目标船的行为特征与本船追越目标船时类似,区别在于B从180°左右开始变化,Visionangle从0°左右开始变化,本船驾驶员先看到目标船的船首,然后逐渐看到目标船的右舷或者左舷。
3)对遇局面
本船航速V0=15 kn,目标船航速Vt=20 kn,目标船的行为模拟结果如图3所示。从模拟结果可以看出,整个模拟过程持续时间较短,距离R变化快,相对方位B和视角Vision-angle变化速度缓慢,且均在0°左右变化,目标船的视觉特征变化较小,会遇过程中,本船驾驶员始终能看到目标船的船首。

图3 对遇态势Fig. 3 The head-on situation
4)目标船在本船右舷的交叉会遇
本船航速V0=15 kn,目标船航速Vt=20 kn。右舷交叉会遇时,目标船的行为特征如图4所示。可以看出,多数情况下目标船的相对方位B逐渐减小,从90°逐渐减小到0°,即目标船超本船船首方向移动;Vision-angle也逐渐减小,从-50°逐渐减小到-150°,目标船的视觉特征变化较大,会遇过程中本船驾驶员始终能看到目标船的左舷。

图4 目标船位于本船右舷的交叉会遇Fig. 4 Crossing situation of target ship on starboard side
5)目标船在本船左舷的交叉会遇
目标船在本船左舷交叉会遇时,本船为直航船,本船航速V0=15 kn,目标船航速Vt=20 kn,目标船的行为特征如图5所示。可以看出,多数情况下目标船的相对方位B逐渐增大,从300°逐渐减小到360°,即目标船朝本船船首方向移动;目标船的观察视角Visionangle也逐渐增大,从50°逐渐减小到150°,目标船的视觉特征变化较大,会遇过程中本船驾驶员始终能看到目标船的右舷。
6)模拟结果分析
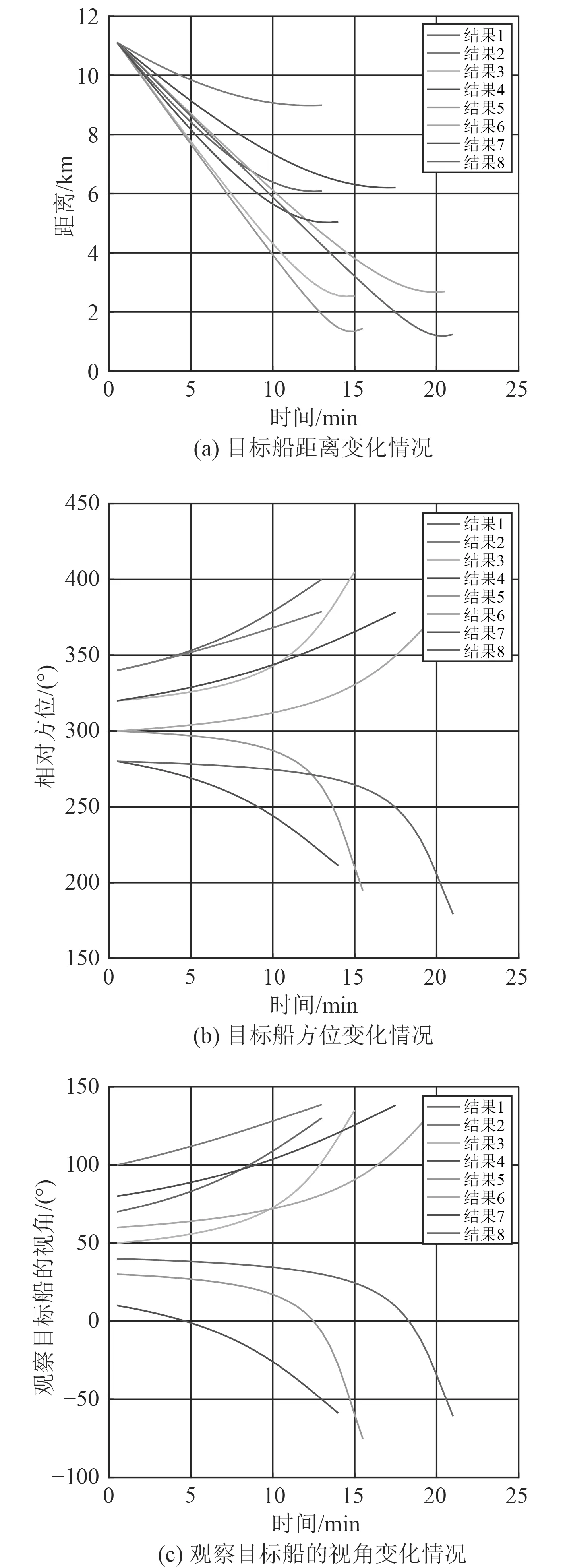
图5 目标船位于本船左舷的交叉会遇Fig. 5 Crossing situation of target vessel on port side
对5类会遇态势模拟结果进行统计分析,得到目标船与本船的距离R、相对方位B以及观察目标船视角Vision-angle如图6所示,其中图6(a)展示了不同会遇态势下,目标船与本船的距离R、相对方位B以及观察目标船视角Vision-angle三个因素的分布情况,图中的单个标记表示一个特定时刻目标船与本船的距离、相对方位和观察视角;图6(b)表示不同会遇态势下,目标船与本船的距离和方位分布情况;图6(c)表示不同会遇态势下,目标船的相对方位和距离的分布情况;图6(d)表示不同会遇态势下,目标船的观察视角和距离的分布情况。

图6 目标船行为特征分析Fig. 6 Characteristics analysis of target ship
从图中可以看出,单纯依据目标船的相对方位划分会遇态势是不合理的。例如,当目标船相对方位B=250°时,真实的会遇态势可能是除了右舷交叉会遇之外的任何一种情况,既可能是目标船追越本船,也可能是左舷交叉会遇。利用目标船与本船的相对方位角和距离,能够较好地区别本船被追越和左舷交叉会遇,对另外3类会遇态势识别能力较差;利用观察目标船的视角和距离,能够较好地区别本船追越目标船和右舷交叉会遇,对遇其他3类会遇态势识别能力差。
在图6(b)中,代表各种会遇态势的标记进行了较好地聚集,不同会遇态势的标记重合较少,这说明利用目标船的相对方位和观察目标船的视角能够很好地进行会遇态势地划分,观察目标船的视角可作为划分船舶会遇态势的重要依据。观察目标船的视角之所以能够用于划分船舶的会遇态势,是因为它的大小受目标船舶的航向和相对方位两方面因素的影响,其本质也是利用目标与本船的航向差和相对方位来划分会遇态势。
目前,船舶获取目标船舶航向的技术手段只有AIS,如果目标船没有安装AIS或者AIS处于关闭状态,在划分会遇态势时则需要进行雷达标绘。观察目标船视角的变化则可以在船载视频监控图像中方便地获取,同时视频图像中目标船所占像素的个数也能反映本船与目标船之间的距离变化情况,这对于驾驶人员和无人船进行会遇态势划分是比较有利的。
3 结 语
通过计算机模拟了不同会遇态势下本船和目标船的运动情况,统计分析了会遇过程中目标船与本船之间的距离、目标船的相对方位、观察目标船视角的变化情况,经过对统计结果的分析,总结归纳了不同会遇态势下目标船的运动特征和视觉特征。统计结果同时表明,单纯利用目标船所处的相对方位划分会遇态势是不合理的。在进行船舶会遇态势划分时,不仅要考虑目标船的相对方位,还应考虑目标船与本船的航向差、距离等因素。
除了考虑传统的用于会遇态势划分的两船距离、相对方位和航向差等因素,本文还重点分析了不同会遇态势下观察目标船视角的变化情况,模拟结果表明Vision-angle这一因素与船舶的会遇态势密切相关,结合目标船的相对方位,可用于基于视觉技术的船舶会遇态势的划分,如基于船载视频分析的会遇态势划分。
在进行船舶行为模拟时,针对一种会遇态势,本文只选取了8种典型的情况,且目标船和本船的速度、航向等参数均固定不变,这些理想假设或许会对模拟结果有一定的影响,但不会影响最终结论的正确性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
社会科学战线(2022年4期)2022-06-15
今日农业(2022年1期)2022-06-01
汽车与安全(2020年1期)2020-05-14
当代陕西(2019年17期)2019-10-08
师道(2018年6期)2018-07-16
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16