基于GMR和VAR的复杂工况下齿轮箱早期异常检测
2023-09-19 05:45:32左洪福李伟男马新宇
机械设计与制造工程 2023年8期
李 鑫,沈 希,左洪福,李伟男,马新宇
(1.南京工程学院汽车与轨道交通学院,江苏 南京 211167)
(2.南京航空航天大学民航学院,江苏 南京 211106)
旋转机械(齿轮、轴承等)在冶金、电力、船舶、航天、交通等众多领域得到了广泛应用。在实际生产过程中机械设备总是在高性能、满负荷状态下不间断工作,若发生故障会停机影响生产,严重时会造成重大的经济损失甚至发生人员伤亡事故,因此有必要对机械设备运行状态进行实时监测。
国内学者在旋转机械的异常检测和故障诊断方面进行了大量的研究。曾磊[1]对截至目前关于异常检测、寿命预测和维修决策的研究成果进行了总结;武雅文等[2]提出了AR-MOMEDA算法,对齿轮箱的高频信号分量进行降噪,并通过试验进行了验证;王志乐等[3]将时域同步平均算法用于齿轮箱故障诊断的信号降噪处理;雷亚国等[4]研究了机械装备故障的深度迁移诊断方法,并用滚动轴承试验进行了验证;王诗阳[5]提出了基于稀疏滤波和参数化时频分析的旋转设备状态异常检测方法。国外学者在机械系统故障预测和健康管理(prognostics and health management,PHM)方面也进行了大量的研究[6-9]。马里兰大学的先进寿命周期工程中心成立了故障预测与健康管理委员会,进一步对PHM技术进行研究[8-9];Islam等[10]研究了基于最小二乘支持向量机和健康指标的故障预测方法;美国的NASA中心对航空航天领域的关键部件/系统的失效机理、加速失效环境试验设计与实现进行了深入的研究,对某些关键设备如电池系统的关键功率部件、航空发动机等的PHM技术进行了大量试验,并公开发布了相应的退化失效试验数据[11],为齿轮箱剩余寿命预测研究提供了统一的基础数据与评价标准,推动了工程领域PHM研究的进展。
本文基于状态监测数据对齿轮箱进行早期故障诊断,为齿轮箱的智能维护提供支持。将正常运行的齿轮信号作为样本,对去噪后的信号建立时间序列模型用于降低变工况对监测信号的影响,以判断出齿轮箱发生早期异常的时间点,并与现有方法进行比较验证了本文异常检测算法的有效性。
1 数据的获取
1.1 数据来源
本文试验数据来源于宾夕法尼亚大学视情维修部门应用研究实验室的变工况机械诊断试验台,齿轮箱的额定输入轴转速为1 750 r/min,额定输出扭矩为62.715 N·m,额定输入功率为3 475 W,从动齿轮齿数为70,主动齿轮齿数为21。2号和3号振动传感器安装在齿轮箱体上,分别为轴向和水平方向。
1.2 采样过程
试验中采用离散间隔采样,采样频率为20 kHz,采样时间为10 s。整个试验过程共采样生成了323个文件。同时还采集了驱动电机的转速和齿轮箱的扭矩数据,分别存放在V01和V05文件夹,采样频率均为1 kHz。试验共分为两个阶段:1)在一定转速下,齿轮箱在100%额定扭矩(62.715 N·m)下共采样生成173个文件;2)将扭矩逐渐增加至300%额定扭矩,再逐渐减小至50%额定扭矩,循环运行直至故障停机。图1所示为齿轮箱输出扭矩。

图1 齿轮箱输出扭矩
投入试验的齿轮箱在100%额定扭矩下运行正常,因此本文只选取变工况下齿轮箱的振动信号进行分析。在变工况下共采样生成150个文件,2号和3号振动传感器采集的数据文件分别保存在A02和A03文件夹,其在变工况下的原始振动信号如图2所示。从图2可以看出,在文件112处原始信号的幅值有明显变化,但该采样时刻是否是齿轮箱早期异常的发生点还不能确定。对齿轮箱拆机进行故障检查,结果为主动齿轮正常,从动齿轮有5个完全损坏和2个部分损坏的齿。

图2 A02和A03的原始数据
2 基于GMR和VAR的异常检测算法
2.1 时域同步平均算法
时域同步平均(TSA)算法[12]将振动数据划分为与同步信号相关联的长度相等的片段并平均。假设从匀速运转的齿轮箱中收集到的每个振动数据文件中有n个数据点,对于一次完整的齿轮运转所得到的采样点数K由下式得出:
(1)
式中:fs为采样频率;fm为齿轮的啮合频率;Nt为给定齿轮的齿数。
在时域同步平均信号中,振动监测数据的时域同步平均信号VTSA(k)由下式计算:
(2)
式中:M为每一个采样数据文件包含的齿轮旋转周期数,M=|n/K|;V(·)为齿轮在一个完整旋转周期内各点的时域同步平均值。
经计算,齿轮的啮合频率为613 Hz,齿轮一个完整的旋转周期所包含的数据点个数为2 285。变工况下齿轮箱的TSA信号如图3所示。

图3 #14齿轮箱的TSA信号
2.2 齿轮运行残差信号
齿轮运行残差(gear motion residual,GMR)信号从TSA信号中移除齿轮的基础啮合频率以及谐波得到,该残差信号的主要成分为由局部齿轮故障引起突变的宽频特性,这对于齿轮的早期故障检测具有重要意义[13]。齿轮在一个完整旋转周期内各点的GMR信号R(k)可表示为:
R(k)=VTSA(k)-E(k)
(3)
式中:E(k)为包括齿轮基础啮合频率和谐波的信号。变工况下齿轮的GMR信号如图4所示。
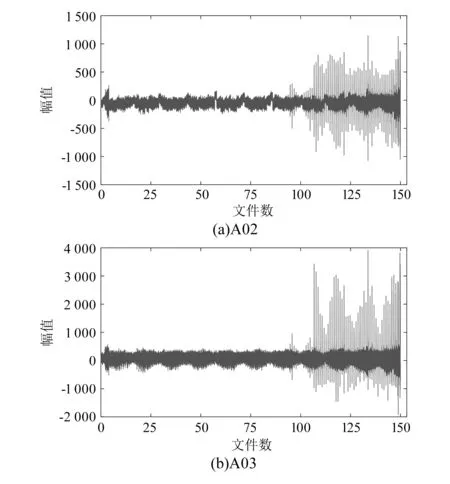
图4 #14齿轮箱GMR信号
2.3 VAR建模及分析
本文选取TSA信号中的健康数据来拟合向量自回归(vector autoregressive,VAR)模型。使用健康数据估计VAR模型中的未知参数,从而获得整个数据集的残差[14-15]。本文使用赤池信息准则(akaike information criterion,AIC)确定VAR模型的滞后阶数[15]。计算方法是在一定范围内让滞后阶数p值由低到高分别计算AIC值,AIC值最小时的滞后阶数为模型的最适合阶数。
本实验将变工况的前5个文件作为VAR模型的定阶根据,使用EVIEWS软件进行VAR建模,得出模型的最佳阶数。表1为A02和A03的单位根检验结果。

表1 A02和A03的单位根检验结果
表1中假设检验P值均小于0.01,可证明健康数据是平稳的,适用于VAR建模。表2中第300组数据中带*的数据有5个,因此确定VAR模型的滞后阶数p为300。

表2 不同滞后阶数p下的计算结果
此外,对VAR模型还要进行平稳性判断,图5为VAR模型的特征根图,图中在线段上的点为实数,不在线段上的点为复数。从图5大致可以看出,这些点均落于半径为1的单位圆内,证明该VAR模型是平稳的。
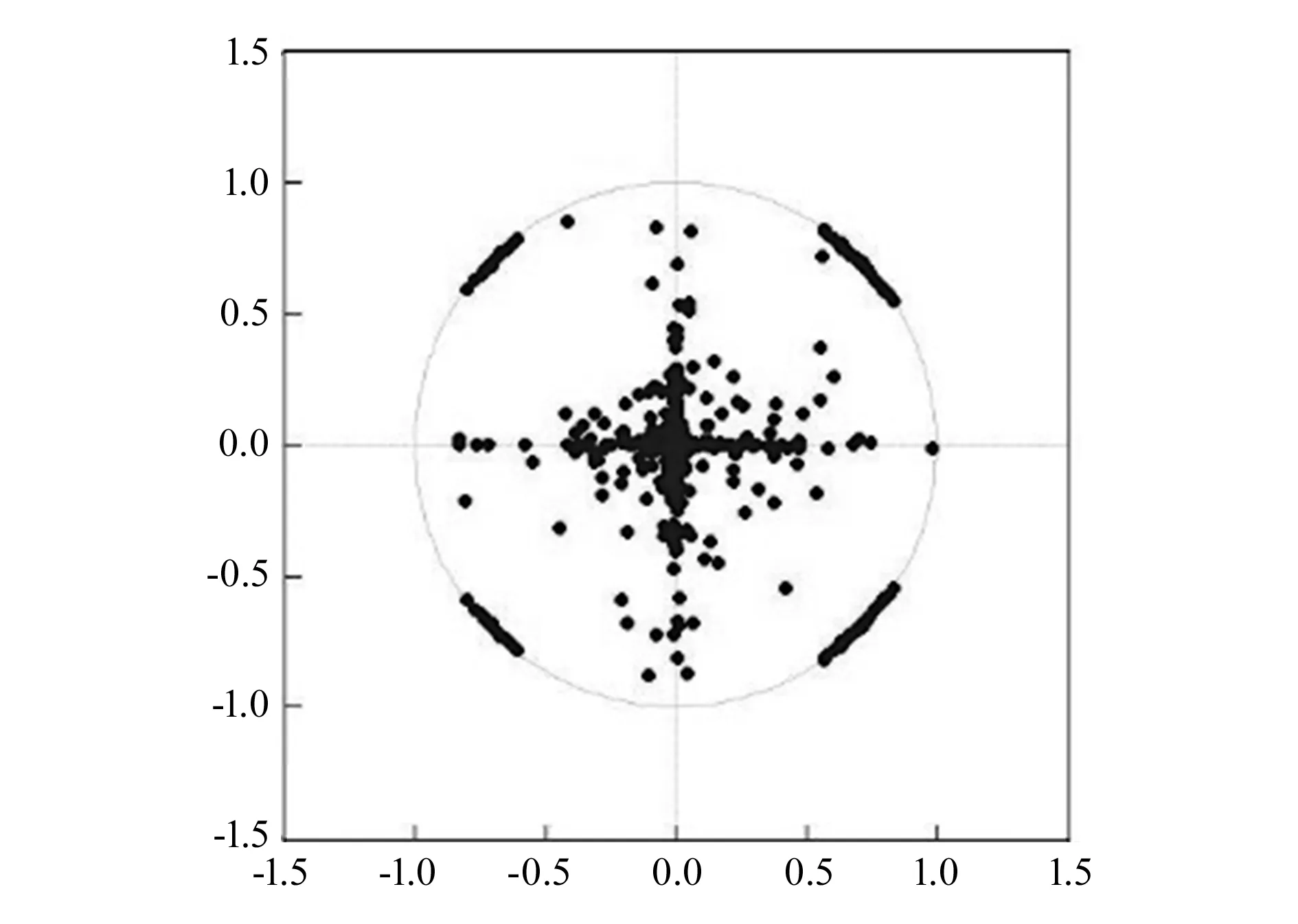
图5 TSA信号VAR模型的特征根图
齿轮TSA信号的残差如图6所示。使用常用的统计量指标如峭度、标准差、均方根等来压缩庞大的数据量。图7~图9分别为A02和A03的TSA信号的峭度、标准差、均方根图。

图6 A02和A03的TSA信号的残差

图7 TSA信号残差的峭度
峭度值越高,表示齿轮发生故障的概率越高。
由图7可知,全部150个文件的峭度值都不为零,故难以判定齿轮箱故障发生的位置。在图8中,齿轮信号振幅都偏小,整体无明显变化,因此也难以判定齿轮箱故障发生的位置。通过对图9的均方根曲线图分析发现,在第129号文件即原始文件为第308号文件处发生明显振幅变化,因此该指标可以在齿轮箱发生明显故障时提前预警,提示齿轮箱发生故障。

图8 TSA信号残差的标准差

图9 TSA信号残差的均方根
同样,对GMR信号的健康部分拟合一个VAR模型,从而获取GMR信号的残差。使用GMR信号进行建模的最佳阶数为400,且VAR模型是平稳的。
齿轮的GMR信号的残差如图10所示。同样使用常用的统计量指标如峭度、标准差、均方根等来压缩庞大的振动数据量。图11~图13是A02和A03的GMR信号的峭度、标准差、均方根图。

图10 A02和A03的GMR信号的残差

图11 GMR信号残差的峭度
同样是峭度值越高,表示齿轮发生故障的概率越高。由图11可知,150个文件的峭度值都不为零,难以判定齿轮箱故障发生的位置。在图12中,齿轮信号振幅都偏小,整体无明显变化,也难以判定齿轮箱故障发生位置。通过对图13中A02和A03的GMR信号残差的均方根曲线图进行分析发现,在第109号文件处发生明显振幅变化,因此该指标可以在齿轮箱发生明显故障时提前预警。

图12 GMR信号残差标准差
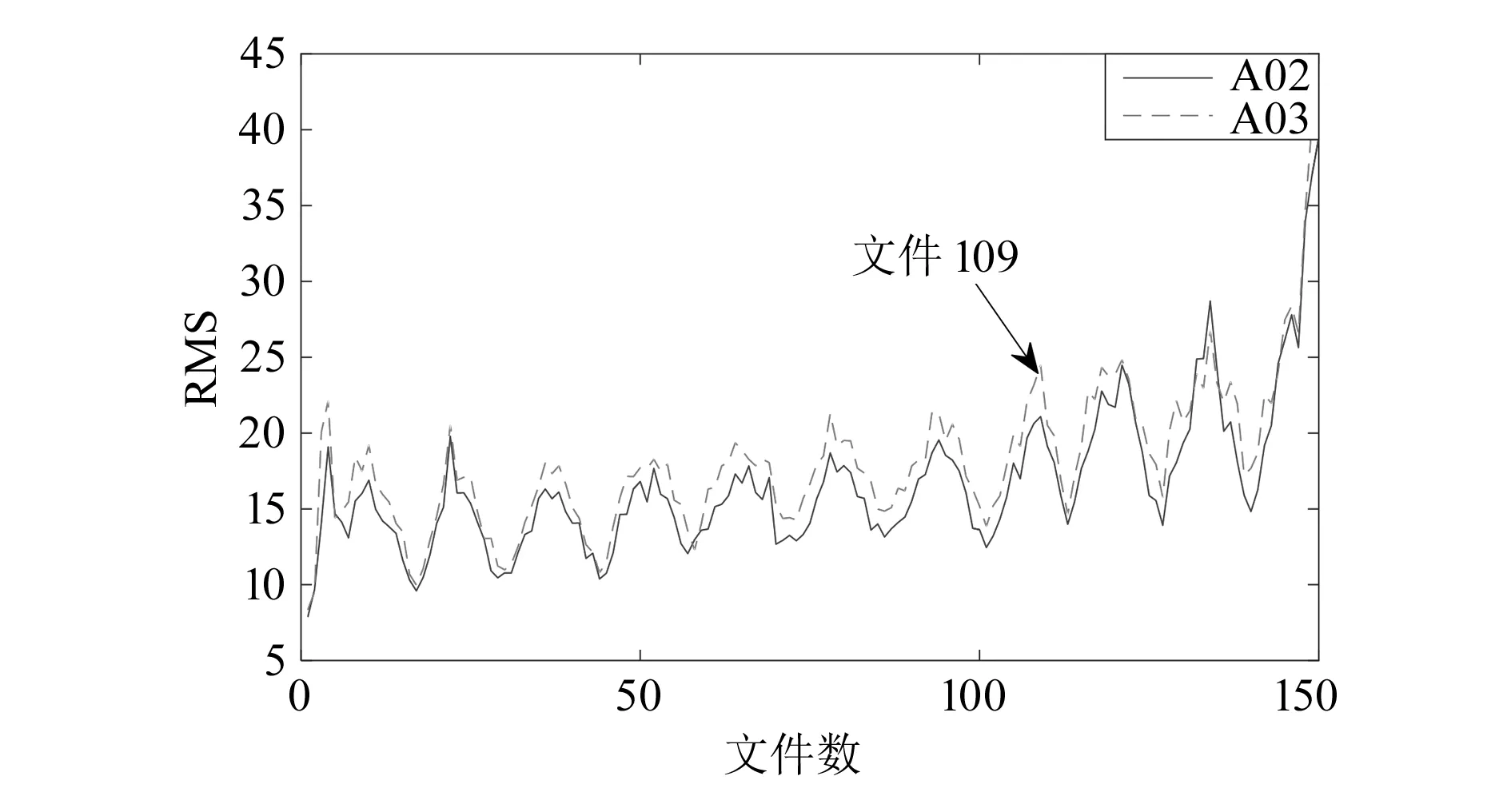
图13 GMR信号残差的均方根
3 结论
1)TSA算法和GMR在齿轮箱故障诊断中起到重要作用,GMR能有效去除齿轮的基础啮合频率以及谐波,为齿轮箱的故障诊断提供依据。
2)VAR模型可对多维数据进行建模分析并计算残差,选取合适的统计量指标能够反映齿轮箱的退化趋势,为进一步故障诊断和寿命预测提供依据。
3)通过统计量指标中的均方根的变化,发现在第109号文件处齿轮箱发生故障,相比TSA信号中得到的在第129号文件处齿轮箱发生故障,提前了20个文件发现异常,证明了本文算法的有效性。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
机床与液压(2023年1期)2023-02-03 10:14:18
大学数学(2021年5期)2021-10-30 09:01:04
华东师范大学学报(自然科学版)(2021年3期)2021-06-03 09:30:10
铁道机车车辆(2020年2期)2020-05-20 02:15:40
电子世界(2018年12期)2018-07-04 06:34:38
自动化学报(2017年2期)2017-04-04 05:14:28
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
振动、测试与诊断(2016年1期)2016-04-13 07:11:18
电讯技术(2014年1期)2014-09-28 12:25:26