3D导板联合混合现实在后交叉韧带重建隧道定位中的应用*
2023-07-04 09:19谢旭华范顺云李靖龙罗浩天
云南医药 2023年3期
谢旭华,范顺云,李靖龙,罗浩天,张 俊,王 锋
(1.云南省第一人民医院骨科/云南省骨科与运动康复临床医学研究中心/云南省数字骨科重点实验室/云南省吕维加专家工作站/云南省数字骨科创新团队,云南 昆明 650000 2.云南省临沧市人民医院骨科,云南 临沧 677000;3.云南省第一人医院/昆明理工大学医学院,云南 昆明 650000)
后交叉韧带(posteriro cruciate ligament,PCL)损伤常见于高能量损伤,导致膝关节后向不稳。Ⅰ度及Ⅱ度的PCL损伤通常采取保守治疗即可获得较好的疗效,而部分Ⅱ度和Ⅲ度损伤严重具有手术指征,关节镜下PCL重建是治疗此类损伤的常用方法[1,2]。
由于PCL胫骨侧止点位于胫骨近端后侧面、胫骨内外髁后缘当中凹陷处,距离胫骨后方关节面约1~1.5cm,关节镜下行胫骨隧道制备时,常规前方入路难以直接观察。另一种为双后入路技术,此方法可直接观察到止点,但技术难度大,需对后叉止点进行较广泛的清理显露,仍有一定局限性。随着数字技术的到来,3D打印、混合现实技术的发展,笔者将两种技术结合用于胫骨隧道的制备,初步验证了该技术的可行性,取得了准确的定位,现报告如下。
1 资料与方法
1.1 一般资料
2022年6月-2023年1月应用3D打印导板联合混合现实技术完成5例患者胫骨骨隧道制备,其中男4例,女1例;年龄18~52岁,平均 32.8岁。左侧2例,右侧3例。致伤原因:运动伤3例,交通事故伤2例。病程5~135 d,中位数 35.5 d。后抽屉试验均为阳性,其中Ⅱ度1例、Ⅲ度4例,合并多韧带损伤3例。纳入标准:(1)临床检查及影像学检查明确初次PCL损伤者(可合并其它韧带损伤);(2)后抽屉试验阳性(Ⅱ-Ⅲ°);(3)有手术指征者,均接受关节镜下PCL重建手术治疗,移植物使用目前公认可靠的自体肌腱或人工韧带[3]。排除标准:(1)局部感染;(2)严重心肺功能受限及内科疾病;(3)下肢有严重静脉血栓形成、下肢畸形或合并骨折等;(4)研究期间不服从研究协议,自行选择出组者。该研究已经医院伦理委员会同意。
1.2 术前准备
1.2.1 建模
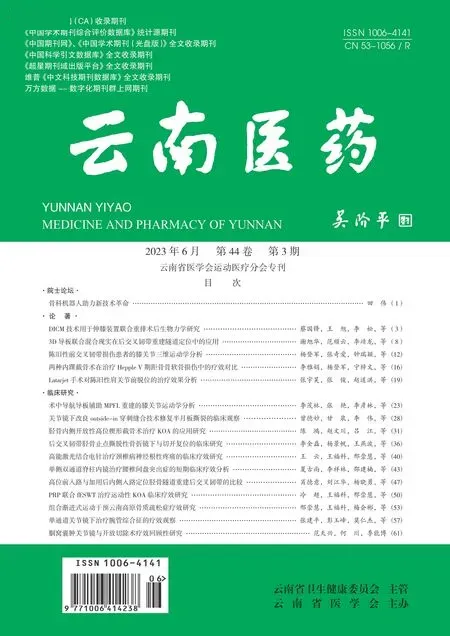
术前扫描所有患者三维CT,将三维CT数据通过MIMICS软件进行膝关节仿真建模设计骨隧道。本研究将骨隧道出口中心点中线位置定为:在CT冠状位影像上应位于两侧髁间嵴中线略偏外侧(占胫骨中内侧总直径的52%处)、关节面远侧1.5cm 处。矢状位上骨道经过髓腔顶点近侧>6mm(保证移植肌腱位于胫骨近端髓腔上方松质骨区),并距离胫骨近端后侧皮质7mm(假设移植肌腱直径9mm,保证胫骨近端后侧保留2mm完整皮质),隧道与胫骨平台关节线矢状夹角在50°,见图1。
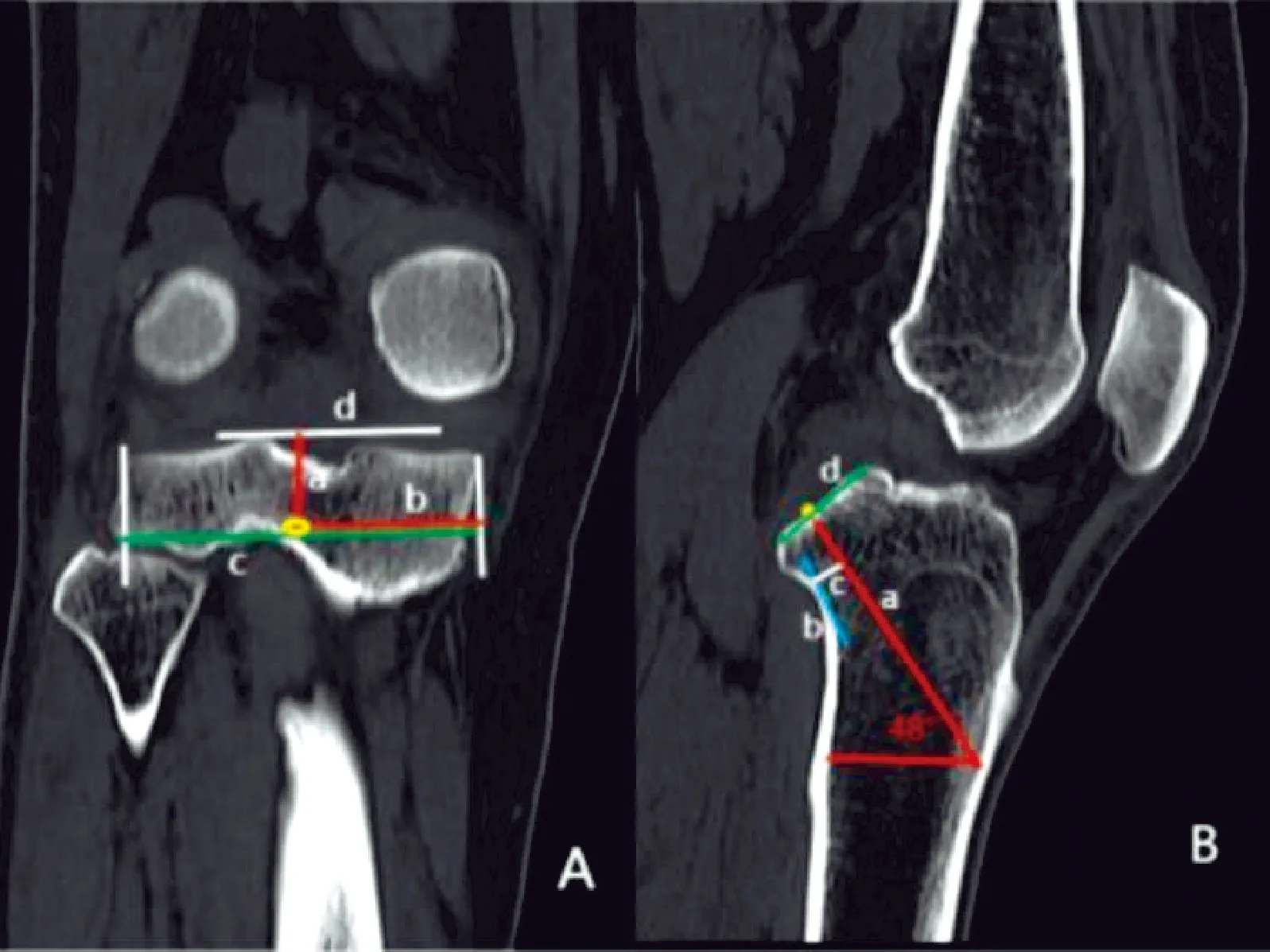
图1 A图为骨隧道在CT冠状位设计情况:c为该处胫骨平台总直径,b为中内侧距离,止点中心占胫骨中内侧总直径的50%,即b/c=50%,a线为距胫骨平台面的距离,为1.5cm,a、b线交点(黄点)为骨隧道中点定位。B图为骨隧道在CT矢状位设计情况:a为骨道中点线,距离胫骨后侧皮质线(b)距离为7mm(c),与胫骨平台的角度为48°,隧道出口点(黄点)位于胫骨平台后侧骨质斜面(d)中下1/3处,并保证a线位于胫骨骨髓腔上方的松质骨区。
1.2.2 制备3D导板
根据设计的骨隧道打印3D定位导板,导板上连接可用红外追踪的示踪球,以及可插入克氏针的指示套筒套,见图2,以便术中通过光学定位系统注册、配准,获取器械、摄像头的空间位置,设置虚拟参数与摄像头进行匹配,让虚拟模型与摄像头捕捉到的真实物体画面实现重叠,达到混合现实效果,以实现三维实时手术导航。

图2 A图中a为3D打印导板,其上带有示踪球,b为胫骨近端三维模型,c为带着示踪球的指示套筒。B图中导板置于胫骨近端模型上模拟定位。
1.3 手术方法
全麻下,患者取仰卧位;患肢驱血后止血带加压(45 kPa)止血,并自然下垂于手术台边缘或屈曲90°于手术台上。常规取关节镜前内、外侧入路,行关节探查明确 PCL断裂;取半腱、股薄肌、2/3直径腓骨长肌做为自体移植物,处理编织肌腱,直径达9mm,长度一般达12cm,用人工韧带者省略上述操作。对半月板等结构处理后,常规制备股骨侧骨道,再从前外侧或中间入路观察,由前内侧入路置入胫骨止点定位器,适度剥离,能将定位器勾到胫骨平台下约1.5cm处胫骨止点处实施保护即可,此时运用3D打印导板联合混合现实技术辅助胫骨隧道制备。骨道制备好后,通过钢丝常规将后叉移植物引入骨隧道,收紧后常规后续操作,固定肌腱。
1.3.1 术中配准
于胫骨结节内侧常规取腱切口处适当显露出胫骨结节内侧、内侧平台下缘,能顺利安装带有示踪球的3D打印导板即可,用克氏针临时固定,利用光学定位设备红外追踪3D导板上的示踪球,进行配准,获取器械、摄像头的空间位置。设置虚拟参数与摄像头进行匹配,让虚拟模型与摄像头捕捉到的真实物体画面实现重叠,达到混合现实效果,实时手术导航见图3。

图3 A图为术中将带有示踪球的3D导板在PST光学定位设备上注册,B图为将3D导板置于胫骨近端并固定,C图在电脑屏幕中可见3D导板已于术前CT影像匹配融合。
此时带有示踪球的指示套筒套所指示的延长线(即骨隧道走行)即可在胫骨CT图像上呈现立体动态显示效果。
1.3.2 3D打印导板联合混合现实技术辅助下胫骨隧道制备
顺导板上的定位钻入克氏针,套入指示套筒,即可在视频中动态观察到指示套筒套所指方向的骨隧道三维全貌,用常规定位器技术定位后,利用指示套筒套实时观察比较两骨道位置,发现两骨道位置基本一致,遂按导板定位位置制备胫骨骨隧道,见图4。
图4 指示套筒套调整角度和位置,可实时在电脑的术前CT三维影像中观察到所指示骨道的位置情况。
1.4 数据处理
2 结果
在纳入研究的5例膝关节中,按隧道中心线与术前规划线的距离对骨隧道的位置进行评估,优:≤2.5mm;良:>2.5mm且≤5mm;合格:>5mm且≤7.5mm;无效:>7.5mm。其中优4例,良1例。术前规划矢状角度(50±2.32)°,术后实测(50.55±2.75)°,误差(0.16±1.9)°,骨隧道的制备时间平均35±5分钟。通过该技术实际制备的骨隧道与术前设计高度一致,见图5。

图5 A、B、C、D图为术前CT、MRI冠状位、矢状位影像,a、b、c、d图为术后CT、MRI冠状位、矢状位影像对比图,术前设计的骨道与最终制备的骨道基本一致。
3 讨论
由于PCL止点位置较深,周围神经血管丰富,传统前入路下无法直视PCL止点,故无法精确定位胫骨隧道内口[4],且增加腘窝血管神经损伤风险[5]。为此,不少术者选择双后入路重建PCL,该术可较好的观察后叉残端,但在清理腘窝后侧组织及残端时也会增加血管、神经损伤风险[6],不利于移植肌腱的再韧带化,术后甚至发生膝关节旋转功能障碍和本体感觉缺失的风险[7]。移植物植入时应考虑以下3个方面:(1)“杀手转弯”效应;(2)骨隧道位置;(3)移植物长度。移植物与胫骨隧道口之间相互磨损,导致移植物强度下降,隧道口扩大,即“杀手转弯”效应[8],为减小该效应,术者会选择较大的隧道角度以减少磨损[9],这样会使移植肌腱进入胫骨髓腔区。有研究发现移植物与骨质的愈合强度在以松质骨为主导的股骨隧道要明显优于以骨髓为主导的胫骨隧道[10]。
此外,当胫骨隧道角度过大时,还会增加近端胫骨后皮质与 PCL附着斜面之间“凹陷区”处后皮质破裂风险。针对该问题,Lee等[11]对10具新鲜的尸体胫骨进行CT测量,发现胫骨隧道相对于胫骨干垂线的最大角度不宜超过 52°。王智慧等[12]研究发现在骨道矢状位方面,当隧道与胫骨平台成 50°时被认为是最适宜的角度。此外,移植物长度也是决定其生物力学性能的重要因素,有效长度的增加反而会导致移植物拉伸刚度降低和抗变形能力减弱[13]。受限于关节镜视野、二维视效及手术操作者的经验、技术的差异,如何解决上述问题仍是一个技术难点。笔者通过术前骨隧道模拟规划,术中利用3D导板和混合现实技术将设计的骨隧道还原到实体上,术中可在电脑显示屏上实时监视隧道情况,从而精准定位骨隧道。初步结果证实了该技术的可行性,并体现出精准性高的优势。
本究中发现,混合现实技术会出现“漂移”现象[14],即手术对象的解剖位置在三维空间内相对移动,这是因为配准有较大难度。配准就是把虚拟的3D数字模型与真实环境下的人体进行配准,保证实时环境下的虚实联动。笔者在人体和器械上同时放置Mark点标记,通过(point source transmittance,PST)定位仪捕捉数据并输入到本研究设计的手术导航系统中实时操作,即可实时配准,实现术中实时观察的效果。
本研究也存在一些不足:(1)CT无法直接观察到韧带止点情况,难以达到个性化和精准化的解剖重建;(2)为避免影像漂移,术中直接将标记物钻入胫骨的特定位置做为Mark点,利用移动CT行三维扫描获得胫骨数据,现场建模进行骨道设计并引导制备骨道,但该方法对设备及技术人员的要求高;(3)跨关节活动后股骨侧骨隧道定位难以用胫骨导板完成;(4)样本数量小。针对上述问题,未来我们准备进行以下改进:(1)MRI能更好的观察软组织情况,若以健侧PCL止点的镜像为参照点进行数字建模设计骨隧道,能有效提高骨隧道放置的准确性;(2)集成现代化人工智能技术探寻经济、简单、可靠的方法以解决配准问题,完善股骨侧隧道定位的导航研究;(3)增加样本量,对骨隧道的相关数据进行进一步的统计学分析,从而得出更客观、全面的结果。
综上所述,当前证据表明,3D导板联合混合现实技术辅助PCL重建可有效提高骨隧道位置的准确性。期待随着计算机辅助系统的软硬件进一步完善,计算机导航辅助下的关节镜手术将会为PCL重建提供全方位个性化、精准化的解决方案。
猜你喜欢
实用器官移植电子杂志(2021年3期)2021-11-30
中国中医骨伤科杂志(2021年9期)2021-09-06
冶金设备(2021年1期)2021-06-09
中华骨与关节外科杂志(2018年9期)2018-12-11
中国运动医学杂志(2017年4期)2017-05-03
山东医药(2016年37期)2016-12-05
实用皮肤病学杂志(2015年4期)2015-12-22
现代冶金(2015年4期)2015-02-06
山东冶金(2014年4期)2014-02-09
中国骨科临床与基础研究杂志(2012年6期)2012-08-15