直升机脚蹬异常低频振动分析
2023-06-28 02:27沈安澜李广健牛亚巍杨昭奎
直升机技术 2023年2期
沈安澜,李广健,牛亚巍,杨昭奎
(1. 中国直升机设计研究所,江西 景德镇 333001;2. 解放军73602部队,江苏 南京 210000;3.昌河飞机工业集团有限责任公司,江西 景德镇 333000)
0 引言
直升机振动问题一直是制约直升机发展的一个重要问题。直升机振动环境的优劣将直接影响机载设备的寿命、结构的可靠性以及乘员的驾乘舒适性。引起直升机振动的原因较为复杂,影响因素多[1-4],因此当直升机出现异常振动时如何快速准确地确定产生异常振动的原因就显得尤为重要。
针对一次直升机脚蹬异常低频振动故障,为了确定引起脚蹬异常低频振动的原因,本文基于脚蹬处飞行振动实测数据和尾操纵拉杆固有频率实测数据,建立了集中质量模型,计算分析了尾操纵杆系的动力学特性以及对于不同频率振动的传递特性;确定了脚蹬振动主要与直升机尾部振动有关;明确了该起脚蹬异常低频振动的原因,并根据分析结果提出了相应的改进措施。经飞行验证,脚蹬异常低频振动问题明显改善,表明解决措施有效。本文的工作可为后续同类问题的分析处理以及后续直升机设计过程中操纵拉杆的设计提供参考。
1 振动问题描述
据飞行员反馈,该次脚蹬打脚问题的主要表现:飞行全程脚蹬存在高频振动叠加异常低频振动,特别是1秒1下的异常低频振动的振感强烈,影响飞行员正常的飞行操纵。
脚蹬处实测振动水平数据结果如表1和图1所示,脚蹬振动以垂向振动为主。其主要频率成分为主桨一阶通过频率(KΩ),尾桨转速频率(Ωt)以及尾桨一阶通过频率(KtΩt)。
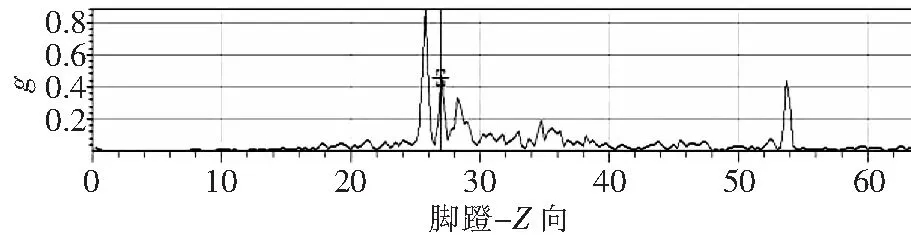
图1 脚蹬测点垂向典型频谱图

表1 飞行振动实测结果
图1所示的脚蹬振动的频谱曲线中,并没有发现存在异常的低频振动频率成分。为了分析脚蹬异常低频振动的具体频率特征,进一步对脚蹬振动时域数据进行低通滤波分析,发现脚蹬处也并不存在异常的低频振动成分。进一步通过带通滤波分析发现,主桨KΩ和尾桨Ωt振动合成了频率为1.3 Hz振幅为1.0g的拍频振动,如图2所示。拍频振动的主要原因是当两个相近频率的振幅相当时,振幅的包络线形成了一种特殊的低频振动[5-8]。结合该机出现脚蹬异常低频振动的时机,确认该机脚蹬异常低频振动是因脚蹬处主桨KΩ和尾桨Ωt振动合成1.3 Hz的拍频振动所致。
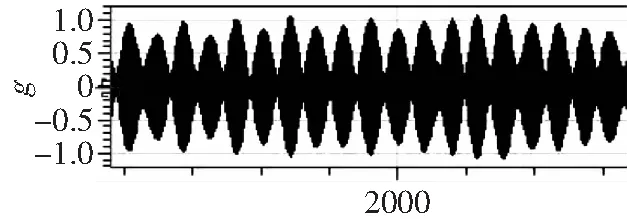
图2 脚蹬测点垂向滤波后时域曲线图
脚蹬实测结果显示,脚蹬处KΩ和Ωt振幅分别为0.82g和0.45g,这两个主要频率下的振动水平均偏大。因此,为了解决脚蹬处的低频拍振问题,基于拍频振动的形成机理,就必须要降低脚蹬处主桨KΩ以及尾桨Ωt的振幅,并且两者的幅值需要尽可能地差得远。而为了降低脚蹬处主桨KΩ以及尾桨Ωt振幅,需要先行确定脚蹬处主桨KΩ和尾桨Ωt振动的主要传递路径以及该传递路径上的振动传递特性,从而确定相应的解决措施。
2 动力学建模分析
如表1所示,脚蹬、座舱和尾减的振动实测结果表明,脚蹬处KΩ、Ωt和KtΩt等主要振动频率下的振动水平均远高于座舱的振动水平。对比脚蹬主要频率下的振动幅值与尾减处的振动幅值发现:脚蹬处主桨KΩ振动水平略大于尾减;脚蹬处尾桨Ωt振动水平略小于尾减;脚蹬处尾桨KtΩt振动水平明显小于尾减。进一步对比分析脚蹬、座舱和尾减主要频率下振幅的变化趋势,结果如图3和图4所示。
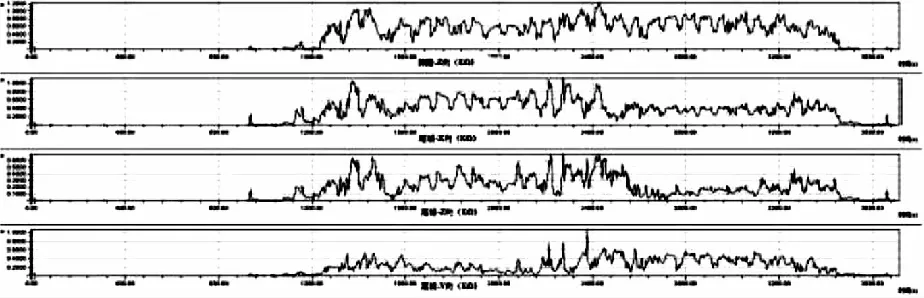
图3 脚蹬与尾减KΩ振动变化趋势对比图
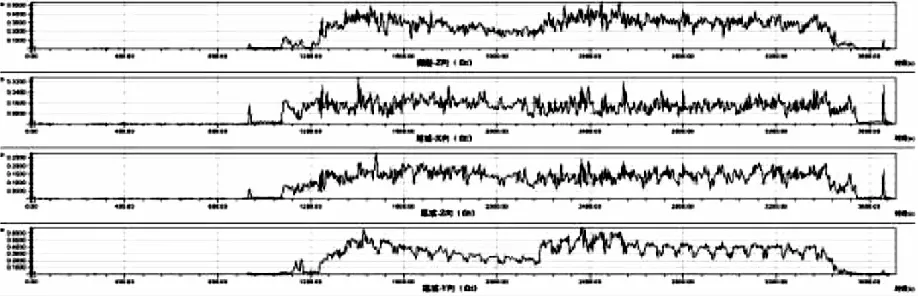
图4 脚蹬与尾减Ωt振动变化趋势对比图
该机地面操纵拉杆动特性测试结果显示,尾操纵拉杆固有频率均已经避开了主要激励频率,因此可以排除是由于单根操纵拉杆存在共振导致脚蹬振动偏大。另外,通过飞行实测结果分析,初步确定该起脚蹬振动大一方面与直升机尾部振动有关,另外还与尾操纵杆系振动传递特性不佳有关。
之前有学者曾对直升机操纵拉杆振动特性进行分析研究[9],但也仅限于对操纵拉杆固有频率靠近旋翼激励频率的情况进行了分析,缺少操纵杆系对不同频率振动水平的传递特性的研究。目前对于由不同固有频率拉杆组成的操纵杆系的振动传递特性问题,在工程上并没有进行系统的研究和分析。因此,为了解决该起脚蹬异常低频振动问题,需要对操纵杆系对不同频率振动的传递特性进行研究和分析。
直升机操纵杆系大多采用硬式连杆设计,由多段不同尺寸的中空拉杆组成,如图5所示。

图5 尾操纵杆系结构示意图
本文基于集中质量模型[10-13]建立动力学分析模型,开展参数化计算分析,得到了尾操纵杆系的对特定频率振动的传递特性,并进一步分析得到不同位置的操纵拉杆主要动力学参数对不同激励频率振动传递特性的影响的趋势。基于分析结果制定了相应的解决措施。
2.1 参数化建模分析
直升机尾操纵杆系大多采用多段不同尺寸的长直中空杆通过拉杆接头和拉杆摇臂联接组成的。由于操纵拉杆侧向和垂向边界约束有较大区别,而且操纵杆系航向操纵运动为自由状态,因此本文主要针对直升机尾操纵杆系的垂向和侧向振动传递特性进行分析。将直升机操纵杆系简化为集中质量模型,并对其进行离散化,将操纵杆系的无限自由度降阶为有限自由度。如图6所示,模型中mi(i=1,2,…,n)表示第i个节点的集中质量;ki(i=1,2,…,n)表示第i段拉杆的弯曲刚度。

图6 集中质量模型
将直升机操纵杆系根据操纵拉杆数量离散为有限个部段,并得到系统的质量矩阵M和刚度矩阵K;基于振动分析的机械阻抗基本方法[14],得到系统的位移阻抗Z;同时,为了简化分析,不考虑阻尼的影响,则系统的位移阻抗为:
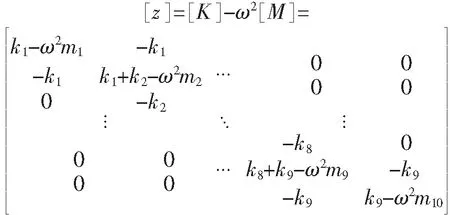
(1)
系统的动力学方程为:
[z][x]=[f]
(2)
由系统的固有频率满足阻抗的行列式为零,即可求得系统的自身圆频率ω,如下式:
|z|=|K-ω2M|
(3)
在正弦激励条件下,式(2)的稳态解呈正弦形式。进一步计算得到系统的位移响应和加速度响应。
2.2 参数影响分析
本文基于各操纵拉杆固有频率测试结果得到各操纵杆的垂向和侧向抗弯刚度,如表2所示。根据操纵杆系中各根操纵拉杆的刚度和质量建立集中质量参数化分析模型,并计算得到操纵杆系前3阶整体固有频率,如表3所示。分析得到了脚蹬处典型频率下的振动加速度传递率结果,如图7、图8以及表4所示。进一步分析了各操纵杆质量和刚度对操纵杆系前3阶固有频率的影响,结果如图9-图20所示。
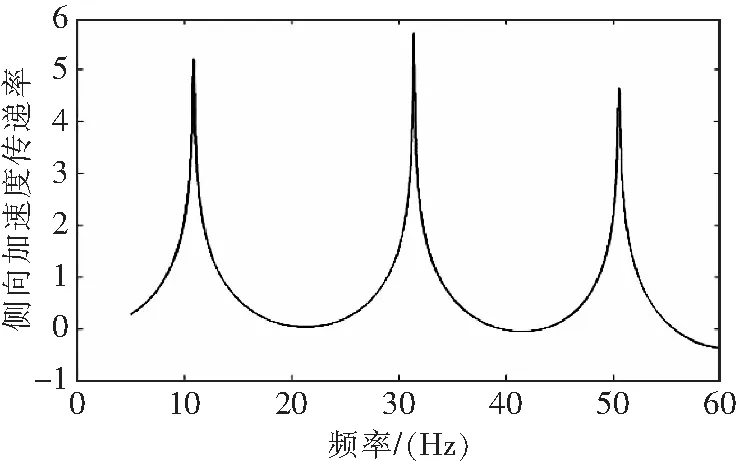
图7 侧向加速度传递率变化对数曲线
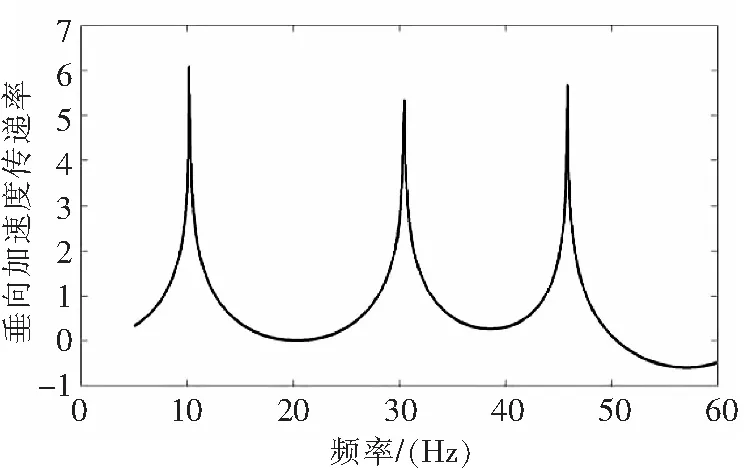
图8 垂向加速度传递率变化对数曲线
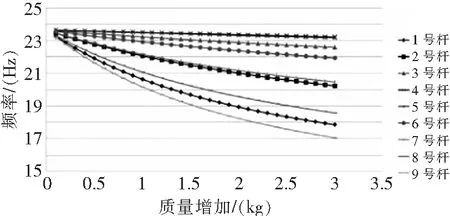
图9 侧向1阶频率随操纵杆质量变化曲线
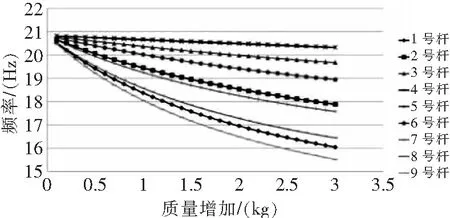
图10 垂向1阶频率随操纵杆质量变化曲线
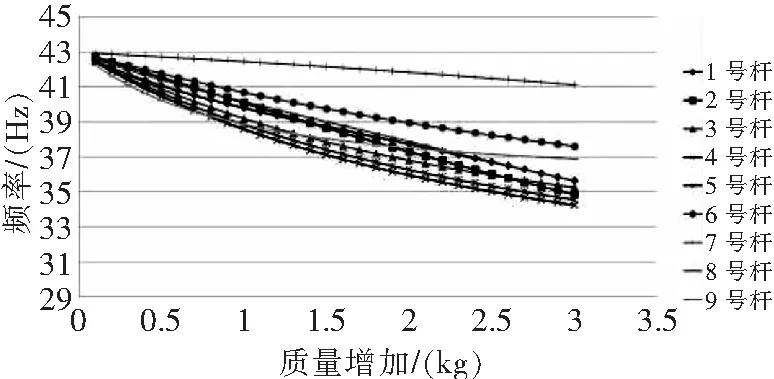
图11 侧向2阶频率随操纵杆质量变化曲线
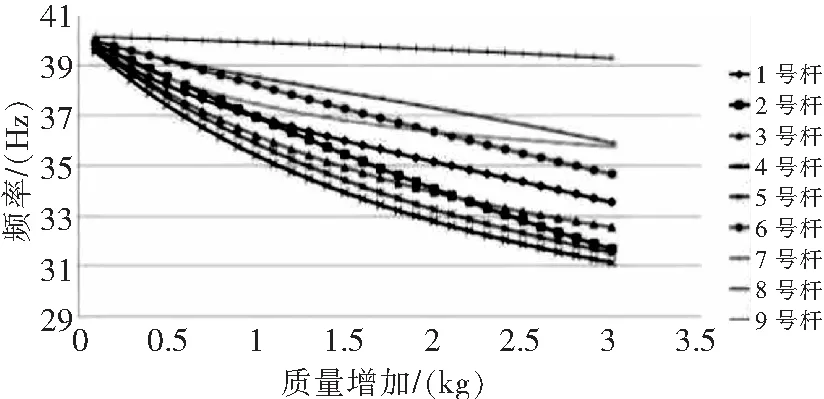
图12 垂向2阶频率随操纵杆质量变化曲线
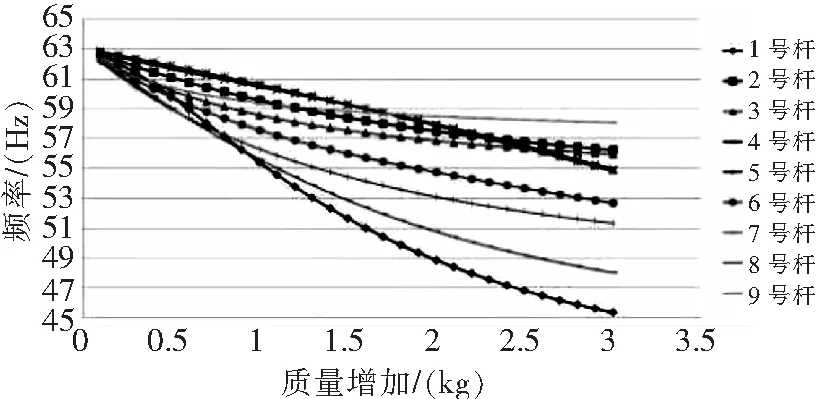
图13 侧向3阶频率随操纵杆质量变化曲线

图14 垂向3阶频率随操纵杆质量变化曲线
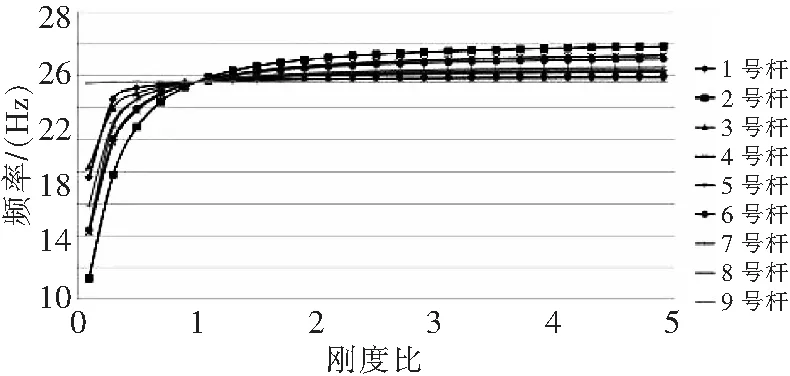
图15 侧向1阶频率随操纵杆刚度变化曲线
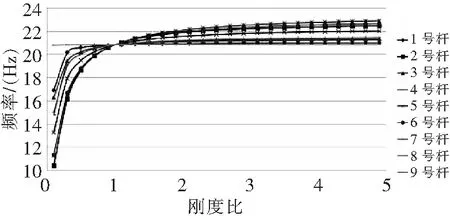
图16 垂向1阶频率随操纵杆刚度变化曲线
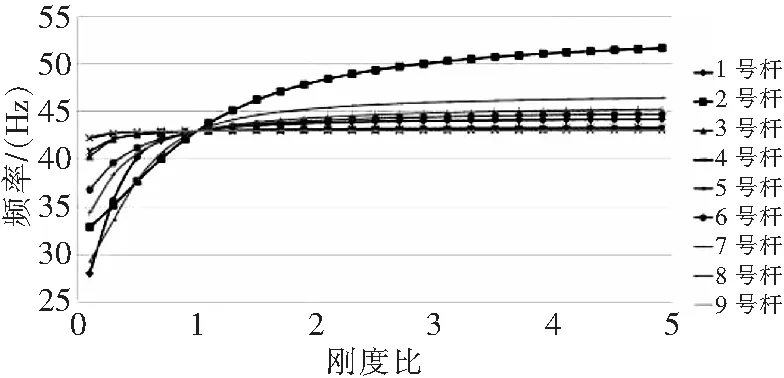
图17 侧向2阶频率随操纵杆刚度变化曲线
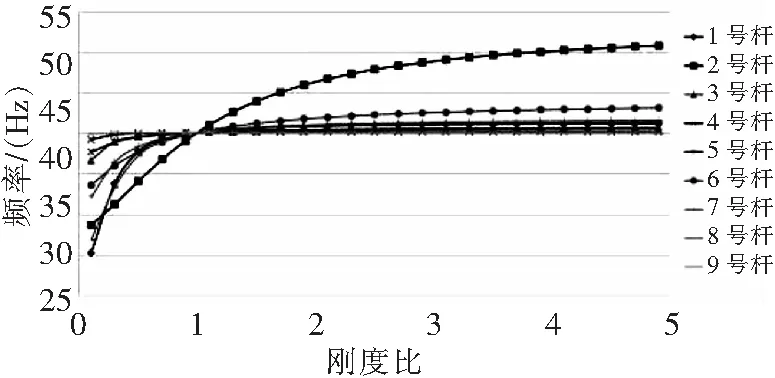
图18 垂向2阶频率随操纵杆刚度变化曲线
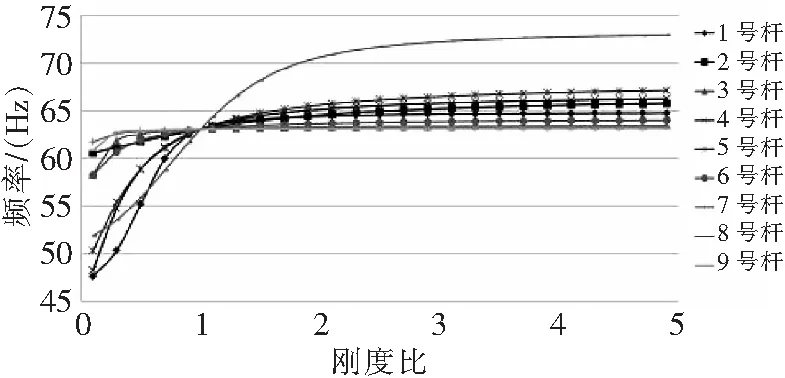
图19 侧向3阶频率随操纵杆刚度变化曲线
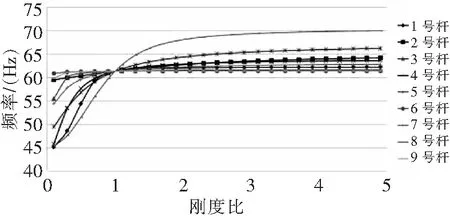
图20 垂向3阶频率随操纵杆刚度变化曲线
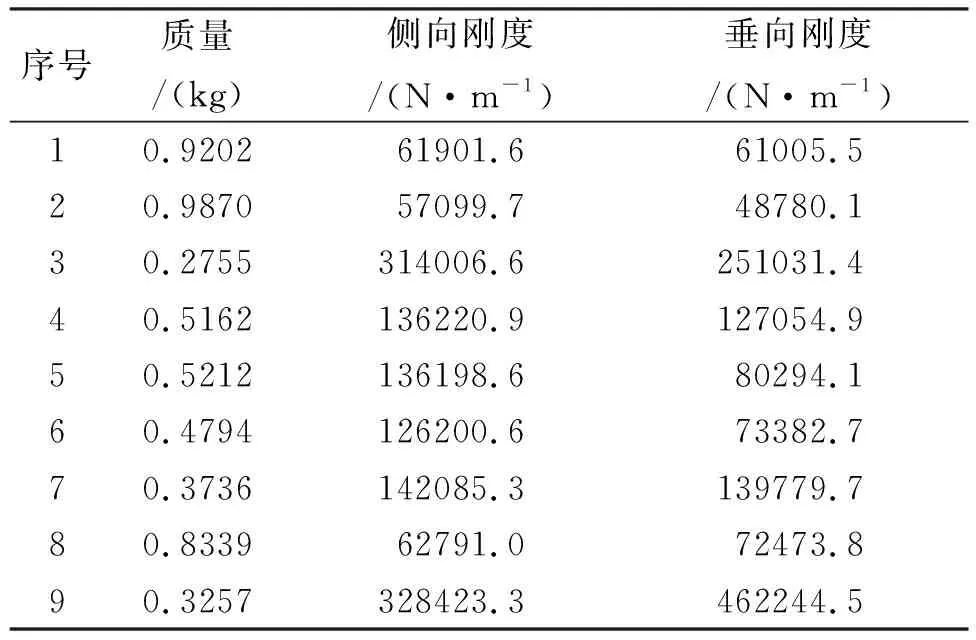
表2 操纵拉杆基本参数
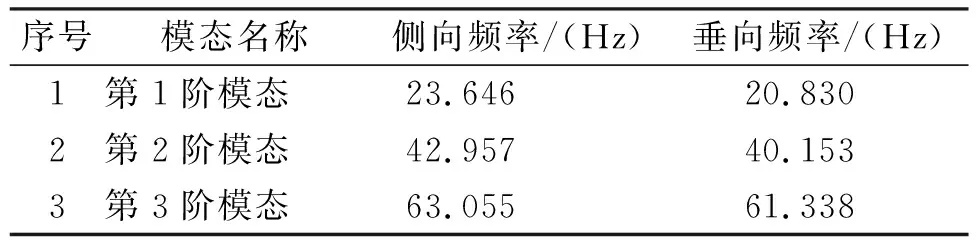
表3 操纵杆系固有频率计算结果
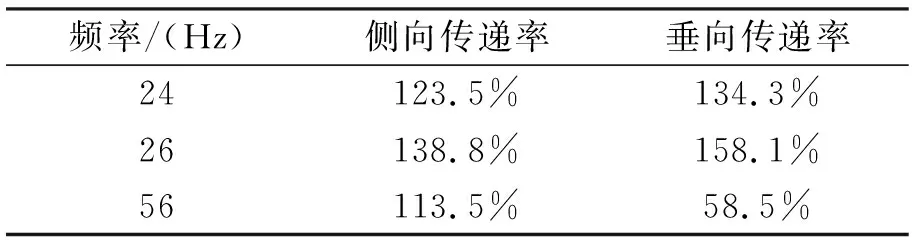
表4 脚蹬处典型频率振动加速度传递率
根据图7、图8以及表4所示,脚蹬对直升机尾部振动的传递率在10 Hz、30 Hz以及50 Hz附近出现大幅增加,这与尾操纵杆系固有频率相关。对直升机尾部20 Hz左右频率的传递率处于120%左右,基本没有衰减,甚至还有一定的放大;只有对50 Hz以上的高频才有一定的隔振作用。分析结果与飞行振动实测结果基本符合。
计算分析结果结合飞行振动实测结果说明,脚蹬处KΩ和Ωt频率下的振动幅值偏大主要是由于尾操纵杆系动力学特性不佳,导致出现振动传递过程中衰减量小,甚至出现一定程度的放大。
对比图9-图14可见,各操纵拉杆对操纵杆系固有频率均有影响。随着操纵杆质量增加,操纵杆系侧向和垂向各阶频率降低。但不同位置操纵杆质量变化对操纵杆系固有频率的影响不同:两端操纵杆(1号和9号杆)的质量变化对垂向和侧向1阶固有频率影响较大;中间的操纵杆质量变化对尾操纵杆系1阶固有频率影响较小,而对垂向和侧向2阶固有频率影响较大;两端的操纵杆质量变化对操纵系统2阶固有频率影响较小;操纵杆系3阶固有频率则受到1号、8号、4号和5号杆操纵拉杆质量变化影响较大;其他操纵杆质量变化对操纵系统前三阶固有频率影响较小。
对比图15-图20可见,各操纵拉杆刚度对操纵拉杆的固有频率存在一定的影响。同时,安装装配等因素会对操纵拉杆的安装刚度产生影响[15],因而导致对操纵杆系各阶固有频率存在不同程度的影响。当操纵杆刚度较低时,各操纵拉杆刚度对操纵杆系固有频率影响较大;当达到一定值后,随着操纵拉杆刚度增加,操纵杆系各阶固有频率逐步趋近于某一频率,处于操纵杆系不同位置的操纵拉杆的刚度对操纵杆系各阶频率的影响不同。
3 解决措施
该起脚蹬异常低频振动故障的主要原因为直升机尾部KΩ和Ωt振动经尾操纵杆系传递至脚蹬处,脚蹬处KΩ和Ωt幅值偏高,并且因KΩ和Ωt频率接近从而合成了低频拍频振动,导致飞行员感受到了高频振动的同时也感受到了约1秒1下的低频振动。因此,为了改善脚蹬异常低频振动,需要将脚蹬处KΩ和Ωt振动幅值降低并避免形成拍频振动。
参数化模型计算分析结果显示,脚蹬振动的来源为直升机尾部的振动。另外,组成尾操纵杆系的操纵拉杆数量较多,各个操纵拉杆的质量和刚度不仅影响其自身的固有频率,而且对操纵杆系整体的固有频率也有一定的影响,并且不同位置的操纵拉杆对操纵杆系整体频率的影响程度不同。为了解决该脚蹬异常低频振动问题,需要对相应操纵拉杆的安装固有频率进行调整,从而改善尾操纵杆系对特定频率的传递特性。由于尾操纵拉杆安装力矩对操纵拉杆安装固有频率有一定的影响[15],因此通过调整相应操纵拉杆的安装螺栓拧紧力矩来改变操纵拉杆的安装固有频率,从而改善尾操纵杆系对特定频率的传递特性。
根据当时现场实际情况,采取的解决方案主要为:一方面降低直升机尾部主要振源的振动水平(主要为尾桨的振动水平);另外对相应的操纵拉杆的安装力矩进行调整,改善尾操纵杆系对特定频率的传递特性。
为了验证改进措施的有效性,完成调整后开展了试飞验证,结果如表5和图21所示。
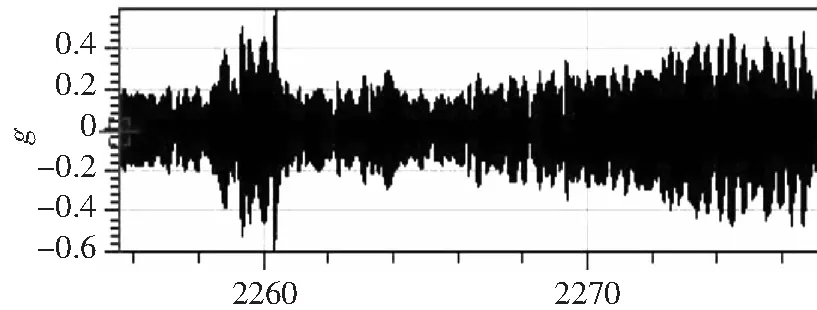
图21 调整后脚蹬测点垂向滤波后时域曲线
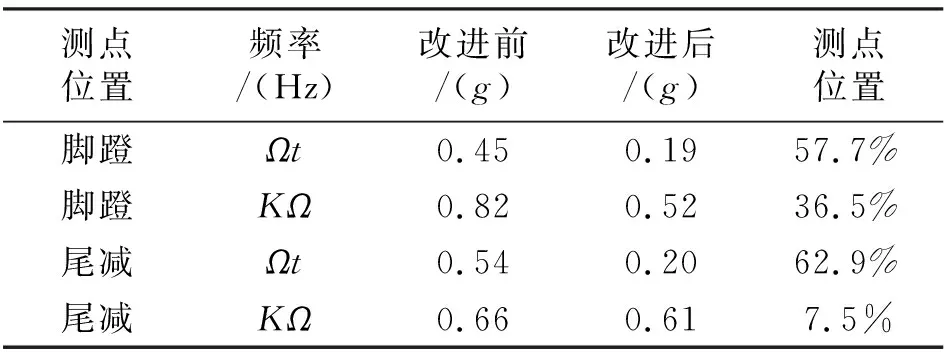
表5 改进前后脚蹬处振动水平对比
根据表5和图21结果可知,降低尾桨叶振动以及调整尾操纵拉杆的力矩后,尾减处Ωt的振动水平以及脚蹬KΩ和Ωt的振动水平均明显降低,拍频现象得到明显改善;同时飞行员反映调整后该机脚蹬异常低频振动现象明显改善,脚蹬异常低频振动问题解决。
4 结论
本文分析并解决了直升机脚蹬异常低频振动问题。通过建模计算分析,准确定位了问题原因,并依据计算结果,制定了相应的解决措施,并经过了试飞验证。得出如下结论:
1)直升机采用多段硬式拉杆设计的尾操纵杆系,其尾部振动是脚蹬振动的主要来源,而操纵杆系是脚蹬振动的主要传递路径;
2)在进行尾操纵拉杆设计时,不仅需要考虑单根拉杆固有频率,还应该考虑由不同尺寸操纵拉杆组成的操纵杆系的动力学特性,必要时需要进一步确定操纵杆系对机体主要激励频率振动的传递特性;
3)本文建立了集中质量模型,计算分析了操纵杆系对不同频率的振动传递特性,计算结果基本符合实际情况;
4)本文根据飞行振动数据分析结果,结合尾操纵杆系动力学特性和振动传递特性计算分析结果,确定了故障原因,同时从外场排故的实际情况出发提出了相应的解决措施,经飞行验证,解决措施有效。
猜你喜欢
现代信息科技(2023年13期)2023-09-14
青少年科技博览(中学版)(2023年1期)2023-03-17
工业设计(2022年9期)2022-10-13
教练机(2022年4期)2022-03-13
锻压装备与制造技术(2021年3期)2021-08-13
新生代·上半月(2019年6期)2019-09-10
中国自行车(2018年7期)2018-08-14
农机使用与维修(2018年5期)2018-07-05
中小企业管理与科技·下旬刊(2016年4期)2016-11-19
铁道机车车辆(2016年3期)2016-10-25