基于CAN总线接口的车载操纵杆设计
2023-09-14 12:45李康
现代信息科技 2023年13期
摘 要:在车载半自动发控系统中,操作人员常常通过操纵杆来控制身管的调转,从而实现对目标的跟踪瞄准控制。针对车载发控系统设计了一种基于CAN总线接口的操纵杆,该操纵杆由霍尔传感器输出两轴连续模拟量,经CAN总线接口转换为方位、高低角控制数据,还可以接收上位机的角度误差信息并通过显示屏显示。产品设计过程中充分考虑了在电磁干扰环境下工作的特点,通过在电路和软件方面采取措施,有效提高了产品的各项性能,目前已经在系统中批量应用。
关键词:发控系统;CAN总线;操纵杆;霍尔传感器
中图分类号:TP211 文献标识码:A 文章编号:2096-4706(2023)13-0058-05
Design of on-Board Joystick Based on CAN Bus Interface
LI Kang
(Lianyungang Jari Electronics Co., Ltd., Lianyungang 222006, China)
Abstract: In the on-board semi-automatic launch and control system, the operator usually controls the turning of the barrel through the joystick to realize the tracking and aiming control of the target. A joystick based on CAN bus interface is designed for on-board launch and control system, the Hall sensor in the joystick outputs two-axis continuous analog signals, which is converted into the azimuth, high and low angle control data through the CAN bus interface, and the joystick can also receive the angle error information of the upper computer and display it through the screen. In the process of product design, the characteristics of working in the environment of electromagnetic interference are fully considered, and the performance of the product is effectively improved by taking measures in circuit and software. Currently, it has been applied in batches of system.
Keywords: launch and control system; CAN bus; joystick; Hall sensor
0 引 言
操纵杆是目前控制系统的重要控制部件之一,采用高可靠开关、力敏传感器或霍尔传感器,将各种操控功能集中手/脚上完成,广泛应用于航空、航天、战车、船舶等运动载体操控中,实现对目标的控制、选择、定位和跟踪等[1]。在车载设备的发控系统中,跟蹤系统主要由一个操作者、一个双自由度操纵杆、一个方位和高低电液伺服系统组成[2],操纵杆是实现由单一操作者进行目标跟踪的关键部位。在跟踪过程中,操作者需要通过显示装置获得与设定值的角度误差,进而通过操纵杆控制液压式或机电式随动系统,最终实现对俯仰角、方位角的控制。
基于车载发控系统的功能控制需求,和在复杂电磁环境下工作的特点,本文介绍了其操纵杆的主要软硬件设计内容。该产品使用了稳定的电源电路和接口电路设计,以CS32F系列微控制器实现霍尔传感器模拟量的高精度采集,通过CAN总线进行数据输出[3]。目前该操纵杆已在系统中安装应用,性能稳定、运行良好。
1 总体设计
操纵杆采用CAN总线接口与发控系统进行通信,其具有接口连接简单、可靠性高、抗干扰能力强、数据传输速度快等特点,在工业生产控制等诸多领域广泛使用[4]。CAN的电路结构简单,用双线串行通信方式可以使得各控制单元能够通过CAN总线共享所有的信息和资源,达到简化布线、减少传感器数量、避免控制功能重复的效果。
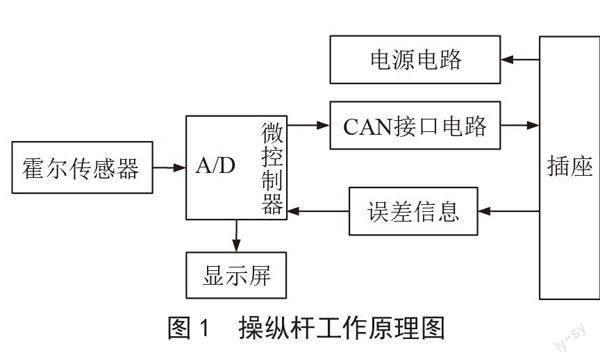
操纵杆由霍尔传感器、微控制器电路、电源电路、CAN接口电路、显示屏等组成。操作人员通过操作霍尔传感器输出两轴连续变化的0~+3.3 V模拟量[5],经CS32F系列微控制器数据处理后转化为12位数据量进行输出。与此同时,CAN总线将系统反馈的角度误差信息在微控制器内进行处理,并在显示屏上进行直观显示。操纵杆工作原理如图1所示。
2 硬件设计
2.1 电源电路
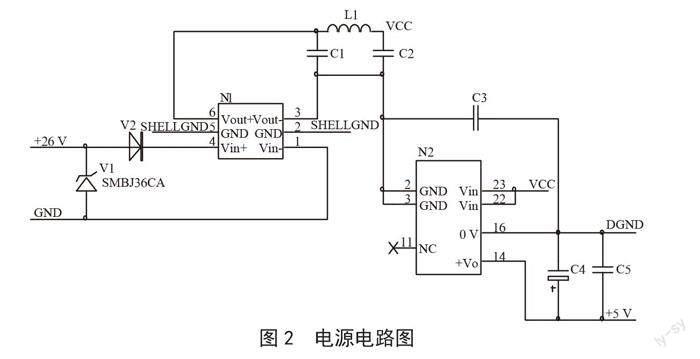
操纵杆的电源设计是整个电路板PCB设计最重要的一环。操纵杆由+26 V直流电源供电,经滤波器和稳压模块处理得到传感器和控制器供电电源[6],如图2所示。针对前级电压变化大、线路板空间非常小、输出电压稳定度要求较高、电磁兼容性苛刻等要求,采取的措施主要包括:
1)电源端遵循先防护后滤波的原则,增加双向TVS管SMBJ36CA,同时增加二极管V2防止电源反接。
2)在电源端增加一个小型PCB滤波器N1,额定电流1 A,将金属外壳进行接地处理,对抑制直流电源线干扰具有较好效果。
3)在滤波器后端增加EMI滤波电路,L1为差模电感,C1、C2为滤波电容(4.7 μF/100 V)。
4)采用DC/DC隔离电源N2,支持+9~+36 V直流供电输入,+5 V直流电压输出,5%到100%负载条件下输出精度达到1%,具备输出短路保护功能。
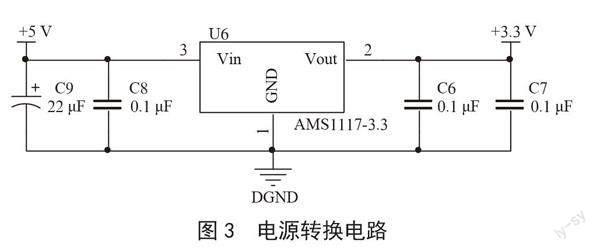
DC/DC隔离电源N2输出的+5 V电压可以供霍尔传感器、CAN接口电路使用,而微控制器的供电电压为+3.3 V,所以设计DC/DC电源转换电路将+5 V电压降压到+3.3 V,电源转换芯片使用AMS1117-3.3,其最大输入电压可支持+12 V,输出电压范围为+3.267~+3.333 V,电压线性度为0.2%,负载线性度为0.4%,可以提供1 A的输出电流。电源转换电路如图3所示。
2.2 霍尔传感器
操纵杆选用了Melexis公司生产的MLX90333KGO型传感器,该传感器是一款三维绝对位置式传感器,具有绝对式位置输出、可编程线性传输特性,采用磁集中感应器和霍尔感应技术,可输出12位精度角度模拟信号,鲁棒性强、稳定性高。该传感器通过检测
X、Y、Z轴磁通量变化,进而由三个方向磁通量变化计算出磁铁相对于传感器的变化角度,并将角度通过芯片内部数字-模拟转换电路转换成模拟电压输出,实现了机械运动量到电信号的转换。该传感器同时具有断线诊断、片上诊断、过压保护、欠压检测等功能。该电路使用+5 V供电,外围电路设计如图4所示。
MLX90333KGO傳感器的配置使用专用编程器PTC04,按图5示意图连接后,通过Melexis Programmable Toolbox配置软件将模拟电压输出设置为0~+3.3 V,即操纵杆在-X、-Y方向最大位移时的电压输出0 V,+X、+Y方向最大位移时的电压输出为+3.3 V,满足微控制器的模拟电压输出范围要求。
2.3 微控制器电路
操纵杆采用CS32F103CB微控制器,该芯片具有以下特点:
1)时钟频率最高可达72 MHz。
2)内置64 KB程序Flash。
3)+2.0~+3.6 V供电和I/O引脚。
4)2个12位ADC,1 μs转换时间,转换范围:0~+3.3 V。
5)串行单线调试(SWD)和JTAG接口。微控制器电路采用了+3.3 V供电和8 MHz外部晶振,将对操纵杆的操纵位移转换为霍尔传感器的X、Y两轴电压输出并连接微控制器13、14引脚,进而进入内嵌的2个12位的ADC并转化为可以处理的数字量[7],如图6所示。
2.4 CAN接口电路
CAN接口电路用于实现微控制器到CAN接口的信号转换,设计如图7所示。为了抑制内部单板高频噪声通过接口向外传导辐射,同时也为了增强单板对外部干扰的抗扰能力,在CAN接口处增加防护和滤波器件[8],采取的措施主要包括:
1)增加共模电感L2,用于滤除差分线上的共模干扰,其阻抗选择范围为120 Ω/100 MHz。
2)CANH、CANL端与地之间并联2个47 pF的小电容,滤除总线上的高频干扰,防止电磁辐射。
3)V3为双向瞬态抑制二极管,反向关断电压
3.5 V以上,结电容小于100 pF。
3 软件设计
3.1 软件功能
操纵杆软件功能模块主要包括:初始化功能模块、数据采集模块、数据处理模块、通信输出模块。各模块实现的功能主要包括:
初始化功能模块:上电初始对各个功能块进行初始化,主要有系统时钟初始化,参考电压初始化,晶振初始化,IO口初始化,A/D功能初始化。
数据采集模块:通过微控制器A/D模块采集霍尔传感器输出的X轴和Y轴模拟信号,每1 ms采集一次,输出的数字信号范围:0×000~0×FFF。
数据处理模块:检测数字信号的合法性并进行上下限设置,采用IIR滤波器进行滤波,保证操纵杆驻停时的数据跳码不大于5 LSB,同时该模块会接收上位机发送的角度误差信息,处理后发送至显示屏。
通信输出模块:通过CAN接口按照传输协议输出,使用CAN2.0标准信息帧格式,数据位传输率为250 Kbit/s,通信周期为10 ms。
3.2 IIR滤波设计
操纵杆需要采集模拟信号,采集模拟信号的信号链中难免引入干扰,输出数据容易发生抖动进而造成跟踪或控制不稳[9]。为保证操纵杆控制目标跟踪的稳定性,在数据处理模块中设计IIR低通滤波器进行滤波处理[10]。IIR数字滤波器,也称为递归滤波器,其运算结构通常由延迟、乘法和加法等基本运算组成,具有精度高、可靠性好、易于集成的特点。IIR滤波器设计工作量相对较小,可以利用模拟滤波器的设计结果,一般先设计一个合适的模拟滤波器,然后利用复值映射把模拟滤波器变换成数字滤波器。
常用的模拟滤波器有很多种,比如巴特沃斯滤波器、切比雪夫滤波器、贝塞尔滤波器等,操纵杆软件设计采用巴特沃斯滤波器,它的特点是通频带内的频率响应曲线最大限度平坦,没有起伏,而在阻频带则逐渐下降为零,在线性相位、衰减斜率和加载特性三个方面具有特性平衡的优点。根据操纵杆输出数据特征,对IIR数字滤波进行了仿真验证,其中通带最大衰减RP、组带最大衰减RS分别设置为1.4、20。验证参数及代码如下:
fs=100;
Wp=1*2/fs;
Ws=4*2/fs;
Rp=1.4;
Rs=20;
t=0:(1/fs):10;
[n,Wn]=buttord(Wp,Ws,Rp,Rs);
y=sin(2*3.14*10*t)+sin(2*3.14*1*t);
[b,a]=butter(n,Wn);
yo=filter(b,a,y);
plot(t,y,t,yo,'r')
通过以上仿真及微控制器内的代码验证,数字输出在加入滤波功能后得到了较大改善,操纵杆驻停和输入变化时的改善效果分别如图8、图9所示。
综上分析,操纵杆驻停时的输出数据波动范围最大为15 LSB,经IIR滤波后,数据波动范围达到最大5 LSB,当操控操纵杆时,其输出数据变化最大同样达到5 LSB,且滤波前后几乎没有延时,满足了数据处理要求。
3.3 异常检测设计
操纵杆软件在数据采集模块、数据处理模块、通信输出模块内加入了异常检测和防护功能,包括以下内容。
3.3.1 电压漂移或掉线检测
在数据采集模块内,微控制器能够实时检测霍尔传感器零位电压大小和电压跳变范围,若不操作操纵杆时的模拟电压超出正常工作范围或发生电压极值跳变,可以判定霍尔传感器出现电压漂移、操縱杆的手柄位置不居中或霍尔传感器至微控制器的导线断开[11],微控制器通过CAN接口向上位机上报故障并切断霍尔传感器的数据采集。
3.3.2 防止显示屏熄灭和倒转
当操纵杆在进行电磁兼容或ESD静电试验时,显示屏容易发生熄灭故障。为了避免屏幕熄灭,在数据处理模块内增加定时刷屏指令,每隔1 s对屏幕进行刷新,保证在屏幕异常熄灭后能重新显示。同时,因屏幕具有翻转功能,在实际ESD试验过程中极易误触发该翻转指令从而造成屏幕显示的内容倒转,因此在软件中加入了屏幕倒转后的自动恢复功能。
3.3.3 通信中断的报错
通信输出模块内,微控制器定时检测CAN通信协议是否正常收发,当CAN通信出现包括CAN通信线缆断开、CAN通信芯片失效等问题时,微控制器会向显示屏发送报错指令,当接收标志位恢复则报错消失、与上位机通信恢复正常,如图10所示。
4 结 论
针对车载发控系统的操纵杆使用需求,本文设计了一种基于CAN总线接口的多功能操纵杆,该操纵杆使用了CS32F系列微控制器作为主控芯片,硬件电路在实现控制功能的同时充分考虑了静电防护、抗干扰等防护措施,软件设计时加入了IIR滤波、异常检测等功能,能较好地实现对发控装置俯仰和方位角度的控制,提高了发控系统的可靠性。同时操纵杆还可以接收发控角度误差信息并进行显示,进一步提高了操控过程的准确度。
参考文献:
[1] 陈碧海,程宝进,李勇.基于C8051F060单片机的精密数字压力表设计 [J].遥测遥控,2019,40(4):71-74.
[2] 赵晓娜,蒋洁.一种双传感器操纵杆的设计实现 [J].电子质量,2021(5):12-14.
[3] 王烁.对基于STM32的CAN总线通信节点设计分析 [J].中国新通信,2018,20(18):32.
[4] 卞子丹.自行火炮CAN总线实时数据采集与故障诊断 [D].西安:西安工业大学,2020.
[5] 蔚道嘉.低噪声线性霍尔传感器的研究与设计 [D].西安:西安电子科技大学,2020.
[6] 李海宝,杜雪珍.一种4冗余高可靠双轴输出操纵杆的设计与实现 [J].电子质量,2018(11):16-20.
[7] 屠晓伟,俞润超,杨庆华.基于STM32和USB的多通道数据采集系统设计与实现 [J].自动化仪表,2020,41(5):84-87.
[8] 王聪,魏文娟,王超.基于CANScope的CAN总线故障诊断及改进设计 [J].中国测试,2018,44(S1):166-171.
[9] 麻召普,张振庄,王小宇,等.船载卫通天线自抗扰控制方法研究 [J].河北省科学院学报,2022,39(2):59-63.
[10] 万小川.一种基于STM32的巴特沃斯带阻ⅡR滤波算法的实现 [J].电子技术与软件工程,2018(13):81-83.
[11] 龙玮洁,高文政.一种操纵杆的死区处理电路设计 [J].电子质量,2018(10):87-89.
作者简介:李康(1990—),男,汉族,江苏徐州人,工程师,硕士研究生,研究方向:人机操控技术。
收稿日期:2023-02-18
猜你喜欢
工业设计(2022年9期)2022-10-13
儿童文学选刊(2019年2期)2019-09-10
时代农机(2019年5期)2019-08-17
农机使用与维修(2018年5期)2018-07-05
现代商贸工业(2016年21期)2016-12-26
现代电子技术(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
中小企业管理与科技·下旬刊(2016年4期)2016-11-19
科技视界(2016年18期)2016-11-03
轴承(2010年12期)2010-08-01