
操纵杆控制电路在轴承表面轮廓仪中的应用
2010-08-01 02:48:12江纯清胡英贝洪泽熙
轴承 2010年12期
杨 晨,江纯清,江 玮,胡英贝,洪泽熙
(1.洛阳轴研科技股份有限公司,河南 洛阳 471039;2.北方工业大学 信息工程学院,北京 100041)
轴承表面轮廓测量仪已广泛应用于轴承表面轮廓、波纹度与表面粗糙度的检测,本公司2008年研制了CR-05型表面轮廓测量仪,其采用触针式测量原理,通过传感器四棱锥测头沿工件表面以0.5 mm/s的速度平稳滑动进行测量,传感器信号经处理后送计算机进行计算和显示。其特点是测量精度高,分辨率最高可达0.003 μm,测量范围大,最大量程为±4 mm。
仪器主要由机械工作台、电气控制箱和计算机3部分组成。测量工件时,需将传感器测头平稳、准确地移动到工件表面被测起始位置,这就要求测头相对工作台在x,y方向做二维运动。若仅采用计算机控制,既要通过显示控制界面操作仪器,又要观察传感器测头与工件的接触状态,操作相对不方便,且只能单维运动,效率不高,位置控制不好容易损坏传感器。
为提高工作效率和安全性,专门设计了一种操纵杆控制电路。其与计算机控制方式配合,均可对传感器位置进行控制,且相对互锁。该控制电路具有操作简单、无级变速、二维同时驱动、超量程自动保护及直观性强的特点,相对鼠标、键盘更符合人的操作习惯,可大大提高仪器操作的灵活性、便利性和安全性。
1 工作原理
CR-05型表面轮廓测量仪机械结构如图1所示,在传感器驱动箱上安装x向驱动电动机,控制传感器左、右位置;立柱上安装y向驱动电动机,控制传感器上、下位置。本电路利用操纵杆控制x,y向电动机进行正、反向运动实现传感器位置控制,并和计算机数字控制信号形成双路控制且互不干扰。两路电动机均选用永磁直流齿轮减速电动机,工作电压为4~18 V,转速随工作电压变化,对应的转速范围为5.3~24 r/min。

1—多维工作台;2—被测工件;3—传感器测头;4—立柱;5—传感器驱动箱;6—传感器;7—大理石工作台图1 机械结构
R系列微型工业操纵杆上分别装有x,y向10 kΩ电位器,自由状态时电位器处于中间位置。在每个电位器两端施加±15 V的直流电压,当操作者推动操纵杆做上、下、左、右方向移动时,相应方向的电位器就会随推移角度(最大25°)的大小分别且同时输出电压在0~±4 V连续变化的模拟信号,利用该信号的正负极性和电压大小分别控制电动机的旋转方向和速度,从而实现位置控制。
如图2所示,操纵杆输出的模拟信号分为两路。一路经绝对值电路变为正极性信号(即速度信号),通过信号放大电路将其绝对值电压放大至驱动直流电动机所需要的工作电压,然后经起步门限开关输入驱动电压无极调速器,该调速器最大可输出+18 V,5 A的直流电流驱动电动机。在绝对值电路后设计了一个单值电压比较器,用来判断操纵杆是否有明显动作,避免误动作,即当操纵杆推移角度大于±3°时,才认为操纵杆确实有动作,输出+15 V,逻辑为1。其输出的“操纵杆已动作”逻辑信号分别送起步门限开关电路和互锁电路。在起步门限开关电路中,当控制逻辑信号为1时,门限开关闭合,放大后的电压输入驱动电压无级调速器;反之,门限开关断开,无电压输入无极调速器。无极调速器输出送至译码选择器。

图2 电路框图(单路)
操纵杆输出的另一路模拟信号经过过零比较器,被转换为两个单值电压。当操纵杆输入信号大于0 V时,过零比较器输出+15 V,逻辑为1;当输入信号小于0 V时,过零比较器输出-15 V,逻辑为0。经过双半波整流器转换成一组两位的数字信号,这组数字信号根据操纵杆的推移方向而变化即构成操纵杆方向信号,该信号送至数据选择器。
在互锁电路中,操纵杆动作信号与计算机方向信号形成互锁,互锁后的输出信号送至译码选择器和数据选择器分别作为速度和方向的选择控制信号。其中,译码选择器对无级调速器输出的操纵杆驱动电压和有极调速器输出的计算机驱动电压进行选择,从而控制直流电动机的速度;数据选择器对操纵杆方向信号和计算机方向信号进行选择,从而控制直流电动机的方向。
此外,考虑到操纵杆控制速度范围较大,为避免人为误操作引起的测头或传感器损坏,专门设计了动作保护电路。当传感器测头接触到被测工件表面后,操纵杆向下控制的动作便受到限制,只允许利用计算机控制进行步进微调,这样既提高了工作效率,又保证了控制精度。同时还设计有急停保护电路,其由与门封锁电路构成,当按下急停开关时,测量仪所有的机械运动立即停止,直至故障解除后急停开关被再次旋起。
2 主要电路的实现
2.1 绝对值电路
绝对值电路又称全波整流电路,其输出电压是输入电压的绝对值,本电路为全波整流正极性输出电路。如图3所示,IC1为反相输入、负极性输出半波整流电路;IC2为反相求和电路。该电路的输出为输入电压的绝对值[1],因此可将操纵杆的速度信号(0~+4 VDC)从操纵杆原始信号中独立出来。

图3 绝对值电路
2.2 单值电压比较器
单值电压比较器是电压比较器中的一种,只有一个基准电压的比较器称为单值比较器。其输入端为模拟量,输出端为数字量(+15 V时为逻辑1,0 V时为逻辑0),是模拟电路与数字电路的桥梁[1]。本电路中,采用的基准电压为0.5 V。当操纵杆有动作且超过一定角度,使比较器的输入电压大于基准电压,输出端即输出高电平;反之,当操纵杆没有动作或动作幅度没有超出一定角度时,则输出逻辑0。这样设计可避免误操作,同时识别出“操纵杆已动作”数字信号,方便了后续电路中操纵杆信号与计算机信号的互锁与选择。同样,过零比较器将操纵杆的方向信号识别出来。
2.3 驱动电压调速器
采用三端可调稳压管LM338将驱动电压无级调速和有级调速合为一体,如图4所示:Ui为操纵杆电压信号,IN1~IN4分别为4级计算机速度信号,它们之间为互锁关系。当操纵杆有电压信号输出时,IN1~IN4逻辑为0,Q1~Q4断开,此时电路相当于一个驱动电压无级调速器,输出电压Uo等于输入电压Ui加上R1上的额定电压U1(恒定为1.25 V),输出电压Uo随操纵杆电压信号Ui线性变化。当计算机有速度信号输出时,则Ui呈高阻状态,相当于断开,根据计算机速度设定,Q1~Q4中某一路导通。此时电路则为一个驱动电压有级调速器,每级的输出电压与其相应通道电阻和电位器的阻值之和(如R2+W1,R3+W2)有关。LM338最高输出电压35 V,最大输出电流5 A,两者关系受器件承受的瓦数限制。
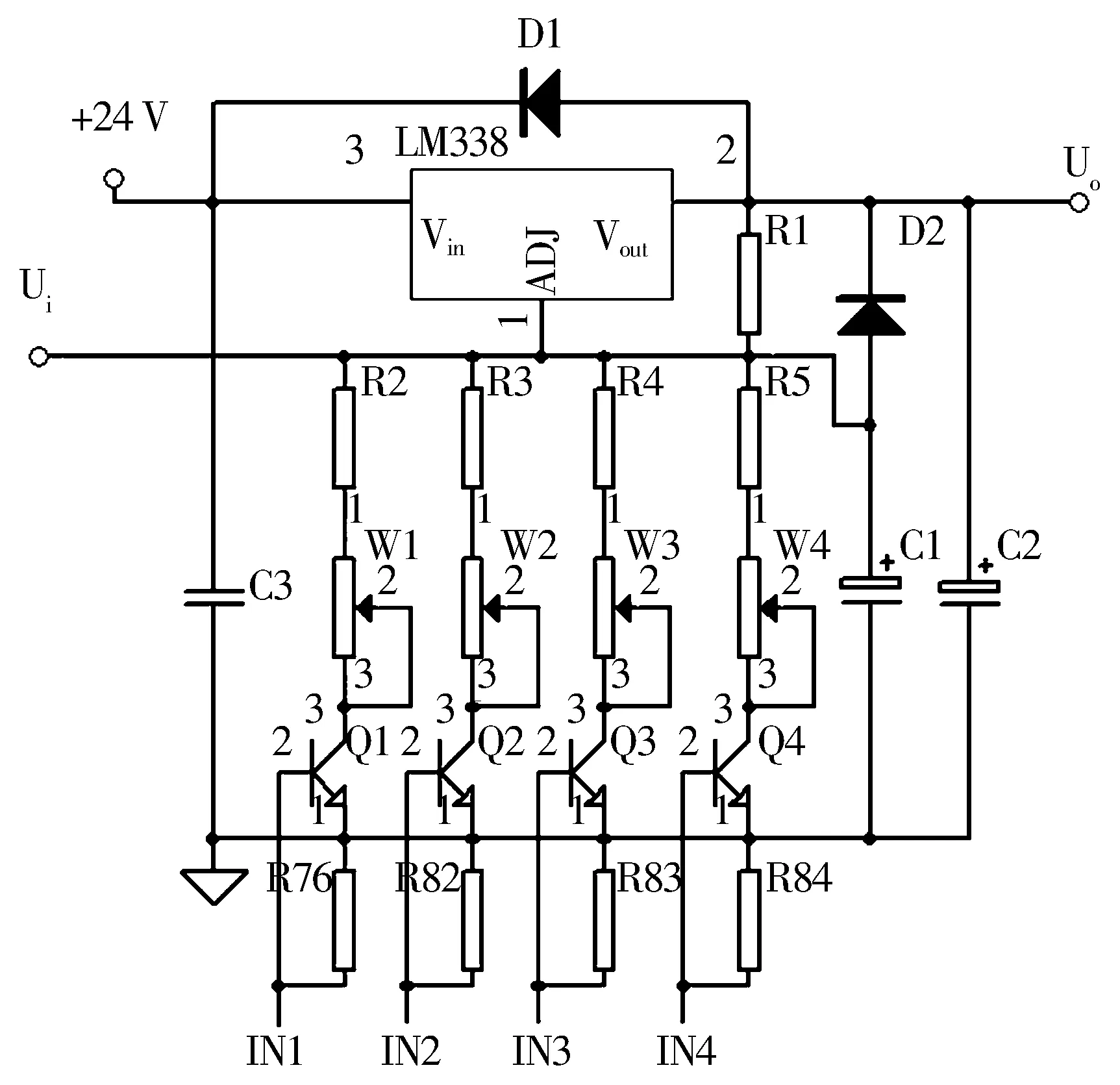
图4 驱动电压调速器
2.4 互锁电路
电路由两个与非门交叉连接组成的RS触发器和两个非门构成。如图5所示,输入1(Vi1)为“操纵杆已动作”信号,输入2(Vi2)为计算机方向信号,Vo2为选中操纵杆控制信号,Vo3为选中计算机控制信号。由真值表(表1)可以看出,当两路输入同时无信号(逻辑为0)时,选中计算机控制,但此时计算机并没有发出方向和速度指令,故没有动作。当Vi1有信号(逻辑为1),Vi2无信号(逻辑为0)时,Vo2逻辑为1,Vo3逻辑为0,选中操纵杆控制;反之选中计算机控制。当两路输入同时有信号(逻辑为1)时,互锁电路输出维持原状态,起到了对两输入信号互锁的作用[2-3]。
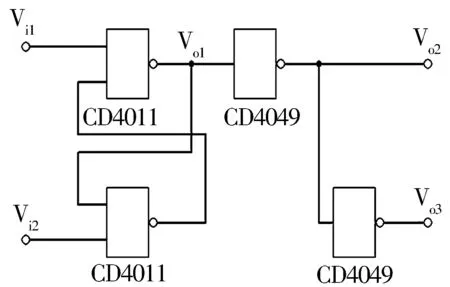
图5 互锁电路

表1 互锁电路真值表
2.5 信号通道选择器
电路中有两个信号通道选择器。其中速度信号采用BCD-十进制码译码选择器CD4028进行选择,BCD码输入由计算机速度信号和互锁电路(图5)的输出信号编码组成,通过译码选择计算机速度信号或操纵杆速度信号[4]。方向信号采用四2选1数据选择器CD4019进行选择,两个控制位分别由互锁电路(图5)的输出控制,选择操纵杆方向信号或计算机方向信号[4]。
3 结束语
在轮廓测量仪原有计算机控制系统的基础上,加入了操纵杆控制电路,充分体现了模拟电路与数字电路的完美结合,极大地提高了操作人员的测量效率,使系统操作更加简捷、方便,同时增强了仪器测量的安全性。目前,该技术已在轮廓测量仪批量生产中成熟应用,并已推广到圆柱度测量仪及大型圆度仪等具有二维、三维控制系统的测量仪器中,得到了用户的一致好评。
猜你喜欢
电子工业专用设备(2024年1期)2024-02-29 02:24:46
现代信息科技(2023年13期)2023-09-14 12:45:22
工业设计(2022年9期)2022-10-13 11:46:14
农机使用与维修(2018年5期)2018-07-05 08:54:24
电脑与电信(2017年6期)2017-08-08 02:04:22
中小企业管理与科技·下旬刊(2016年4期)2016-11-19 05:53:18
水电站机电技术(2016年1期)2016-02-28 14:21:36
合成技术及应用(2015年3期)2015-12-11 08:36:27
大学物理实验(2015年2期)2015-10-22 01:04:39
水电站机电技术(2014年4期)2014-10-13 08:30:03
