未知非线性多智能体系统的分布式有限时间 自适应神经网络控制
2023-06-21 01:21楚东港
仪表技术与传感器 2023年5期
楚东港,刘 烨
(上海工程技术大学,上海 201620)
0 引言
目前多智能体系统已在飞行器的编队、分布式传感器网络、多机械臂协同装备以及网络的资源分配等领域广泛应用[1-2]。多智能体系统经过广大学者多年深入研究,不论低阶亦或高阶系统都已有许多成果。其中的一致性控制问题得到了广泛的关注,而基于自适应控制的分布式一致性控制方法则是在多智能体系统问题研究过程诞生的重要方法。需要注意的是,使用传统递归控制方法处理高阶系统问题时,文献[3]中存在的“微分爆炸”难题将无法避免,这会大幅度的提高计算的复杂度。为了克服“微分爆炸”难题,文献[4-5]引入了基于一阶低通滤波器的动态面控制技术解决了“微分爆炸”难题,降低了计算负担。但是使用动态面控制技术会引入滤波器误差,这会影响控制精度。而文献[6-8]使用了基于正可积时变函数的新型非线性滤波器,该滤波器可完全补偿边界层误差,但会在每一步增加一个自适应项,过多的自适应项会增加计算复杂性。得益于命令滤波器的出现,在原有的滤波器的基础上引入了动态的补偿方程[9-10],从而消除了滤波器误差。但是文献[9-10]中所使用的动态补偿方程中含有符号函数,这将增加系统的抖振行为,不利于系统的稳定。随着多智能体系统在各个领域内的发展,系统的内部问题存在着多样性以及复杂性等特征,这极大地提高了控制器算法设计的难度。文献[11]为解决非线性严格反馈多智能体系统的有限时间一致控制问题,通过逆向设计,构造了针对各智能体的自适应模糊跟踪控制器,从而保证了所有智能体的输出能够在有限的时间内跟踪一个共同的期望轨迹,一致性误差却未收敛到零。而本文的最终控制目标是在有限的时间获得优秀的控制性能,并且当时间趋于无穷时,一致性误差渐近收敛至零。
值得注意的是,随着工业界对精度要求的不断提高,基于智能材料的执行器逐渐被应用,例如压电陶瓷和离子聚合物金属复合材料等,但是它们也有非光滑、非线性等多重特性,磁滞的存在会严重影响控制系统精确性和稳定性[12]。通常解决非线性磁滞输入的方法一般有2种方式:一是通过设计自适应磁滞逆控制器来补偿磁滞现象[13];另一个则是类似于文献[14]对磁滞的处理方法,将磁滞现象建模为线性项和非线性项,通过自适应算法消除磁滞的影响。而常见的模型有死区磁滞模型、PI磁滞模型和Bouc-Wen磁滞模型等。本文将使用Bouc-Wen磁滞模型来描述执行器的磁滞现象。
综上所述,对于具有未知磁滞输入、未知非线性函数和未知外部扰动的多智能体系统,有必要开发一种新的自适应控制算法,该算法不仅可以消除磁滞输入和未知非线性的影响,还可以使此系统在有限的时间内达到规定的性能要求,并且一致性误差渐近收敛至零。本文提出了一种新的基于命令滤波器的有限时间分布式自适应神经网络控制算法,主要贡献如下:
(1) 本文基于文献[15-17],进一步构造了新型性能函数,提出了基于新型性能函数的有限时间Funnel控制方案,不仅使得一致性误差具有良好的瞬态性能和快速的收敛速度还实现了有限时间内达到预设置的跟踪性能要求。
(2) 不同于文献[9-10],本文改进了命令滤波器的补偿项,将其中的符号函数改进为光滑的反正切函数,避免了可能出现的抖振问题,通过此补偿项补偿了动态面控制技术所具有的边界层误差,并结合有界正时变积分函数,最终实现了一致性误差渐近收敛至零。
(3) 通过使用命令滤波器,解决了传统递归方法固有的“微分爆炸”难题,降低了计算负担。
1 问题描述与假设
考虑如下包含未知磁滞输入、未知非线性函数和未知外部干扰的多智能体系统

(1)
式中:xi=(xi,1,…,xi,ni)T∈ni和yi分别是智能体的状态和输出;di=[di,1(t),…,di,ni(t)]T∈ni表示未知外部扰动;fi=[fi,1(xi,1),…,fi,ni(xi,1…xi,ni)]T∈ni表示未知的光滑非线性函数;ui为控制输入,作为磁滞执行机构的输入;Hi(ui)则为输出,其数学表达式被定义为

(2)
(3)
式中:|||χi|||、Ψi分别与振幅和磁滞形状相关的未知参数;mi≥1;,ζi为有界的连续函数[7,19]。
由于本文的控制目标是领导者-跟随者输出一致,在这里将领导者的动力学方程定义为
(4)
式中:f(x)为光滑的非线性函数;y为领导者的输出。
为了实现对非线性多智能体系统式(1)的控制目标,现提出如下假设和引理:
假设1:在系统式(1)中,只存在一个以领导者作为根节点的有向树。
假设2:领导者的输出y及其一二阶导数均为光滑的有界函数。
假设3:存在2个光滑可积的正时变函数ωi(t)和σi(t)满足
(5)

假设4:系统式(1)中的未知扰动满足
(6)
式中hi将在下文中被定义。
引理[7]1:对于正常数λ以及ρ∈R,满足
(7)
引理[18]2:对于正常数η以及γ∈R,满足
0≤|||γ|||-γtanh(γ/η)≤δη
(8)
式中δ=0.278 5。
引理[11]3:对于未知的连续函数f(x)可以使用径向基神经网络函数逼近,可将f(x)表示为
f(x)=θTφ(x)+ε(x)
(9)
式中φ(x)=[φ1(x),…,φl(x)]T∈l是基函数向量;ε(x)为逼近误差;l>1是神经元的个数;选取如下高斯径向基函数
(10)
式中:μm=[μm,1,…,μm,q]T为高斯径向基函数的中心点坐标矢量;m=1,…,l;σ为高斯径向基函数的宽度;θ=[θ1,…,θl]T∈l为神经网络权值,被定义为
(11)
式中Ω∈R。
2 新型自适应神经网络控制器设计
本文基于新型有限时间性能函数,为系统(1)设计了分布式有限时间自适应神经网络控制方案。具体的设计过程如下:
根据文献[7,9]等所描述的图论知识,定义一致性误差为
(12)

选取命令滤波器为
(13)
在此将一致性误差转换函数定义为
(14)
式中Fφi为新型性能函数。Fφi被定义为
(15)
(16)
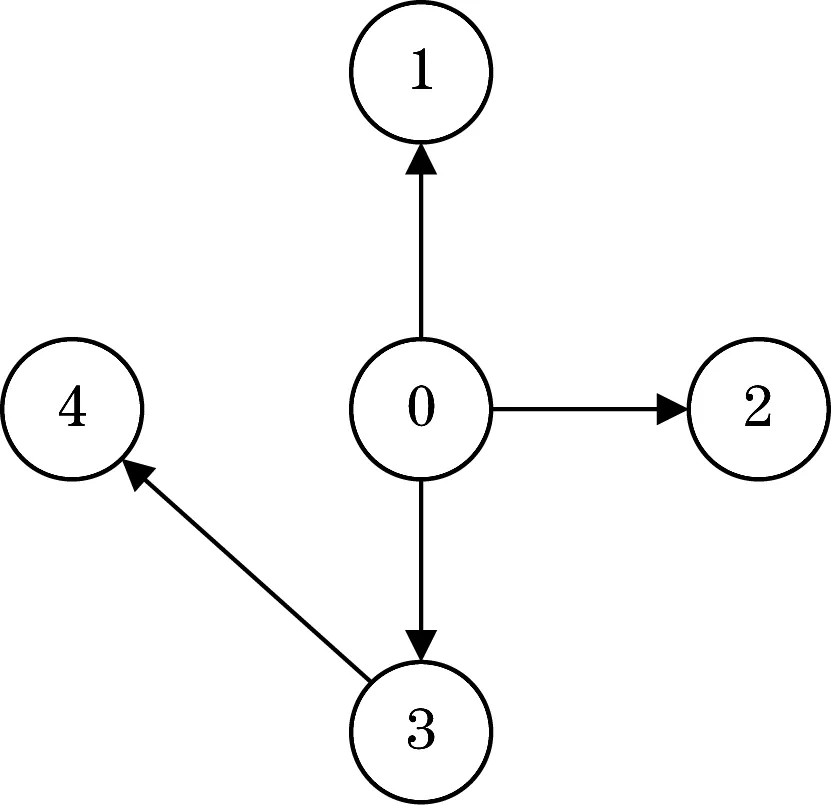
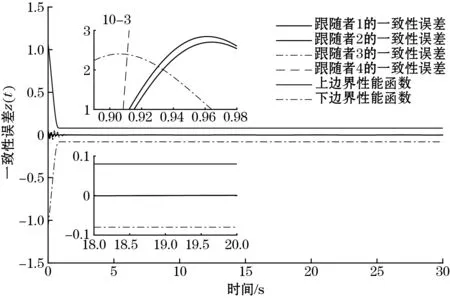
式中:Tc为正的设计参数;hi,0≥1为性能函数的初始值;0 (17) (18) 故在时间(T,Tc)内,函数H存在小于0的值,证明完毕。 在以往的文献中,Funnel控制是一种利用时变控制增益来控制已知的相对一阶或二阶高增益系统的控制方法,而文献[16]通过构造误差转换函数从而消除了阶数的限制。结合文献[15-17]以及本文提出的新型性能函数,本文提出了一种新的有限时间Funnel控制方案。 求得ei,1的一阶导数为 (19) 此外还要对滤波器输入与输出之间的边界层误差进行补偿,得到被补偿后的位置误差变量为 si,j=ei,j-ξi,j,j=1,…,ni (20) 式中ξi,j为改进的误差补偿变量。 (21) (22) (23) (24) (25) 为步骤1选取如下Lyapunov函数 (26) (27) (28) (29) (30) 为步骤j选取如下李雅普诺夫函数 (31) (32) (33) (34) (35) (36) (37) 为步骤ni选取Vi,ni为 (38) (39) (1)闭环系统内的所有信号半全局一致有界; (2)跟随者子系统能够在有限的时间内跟踪领导者的输出,达到预定义的性能指标,且一致性误差渐近收敛至0。 为证明上述定理,首先定义紧集Ω1和Ω2为 (40) 式中R1和R2为正常数。 现将整体系统的李雅普诺夫函数选取为 (41) 对式(41)求导并将式(39)代入可得 (42) 进而在区间[0,t]对其积分,可得: (43) (44) (45) 求得式(44)的一阶导数,并将式(45)代入则有 (46) (47) 多机械臂系统的仿真分析动力学模型[20]为 (48) 结合本文所研究的内容,可将式(48)建模为: (49) 式(49)代表着由4个单连杆机械臂子系统组成的多智能体系统,其领导者以及子系统之间的通信情况由图1所示的通信拓扑图决定。图1中节点0表示领导者,节点1~4表示跟随者,可知:hi=1,a1,0=a2,1=a3,1=a4,3=1,其余皆为0。 图1 通讯拓扑结构 为使得各个跟随子系统的输出均与领导者输出y=0.5sin(t)趋于一致,设置机械臂系统、补偿项和磁滞执行器中的参数为:0.08,hi,0=1;ρi=0.5,i=2,χi=0.5,Ψi=1,mi=3。 本文将跟随者的状态x1,1(0),x2,1(0)的初始值设计为0.05,其余状态初始值皆设计为0。仿真结果如图2~图5所示,图2展示了跟随者跟踪领导者输出的情况;图3展示了在新型有限时间Funnel控制下的一致性误差收敛情况;图4为实际控制输入信号的变化曲线;图5为磁滞回路曲线。图2中跟随者1,2,3曲线较为近似,所以难以区分。 图2 子系统输出跟踪领导者输出的性能 图3 一致性误差 图4 控制输入信号曲线 图5 磁滞回路曲线 本文研究了具有未知磁滞输入、未知非线性函数和外部干扰的多智能体系统的领导者-跟随者一致性控制问题。首先,为保证系统的跟踪性能,本文提出了基于新型性能函数的有限时间Funnel控制方案,使得跟随者能够在有限的时间内跟踪领导者的输出;其次我们利用径向基神经网络函数消除了未知的非线性;最后,令虚拟控制律通过命令滤波器,从而解决了传统递归方法的微分爆炸问题,并且改进了命令滤波器的补偿项,避免了由于补偿项符号频繁改变带来的抖振现象,还补偿了边界层误差。上述的实例仿真结果也验证了本文控制方案的有效性。

















3 稳定性分析




4 仿真分析






5 结论
猜你喜欢
公民与法治(2022年5期)2022-07-29
教学考试(高考物理)(2021年5期)2021-11-08
中医眼耳鼻喉杂志(2021年1期)2021-07-22
河南畜牧兽医(2017年8期)2017-11-24
中国广播(2017年9期)2017-09-30
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15
中国医院院长(2017年7期)2017-06-15
诗潮(2017年5期)2017-06-01
燕山大学学报(2015年4期)2015-12-25
中南财经政法大学学报(2015年5期)2015-04-07