
涵道共轴多旋翼无人机设计研究
2023-06-17 07:17:52李沂霏沈志华王道榆杨卫东
中国科技纵横 2023年7期
李沂霏 沈志华 王道榆 杨卫东
(南通职业大学,江苏南通 226000)
0.引言
多旋翼无人机作为一种优秀的飞行平台,在民用的诸多领域发挥着举足轻重的作用,从影视航拍到农业植保再到国土测绘,我们几乎可以在各行各业中看到多旋翼无人机的身影。多旋翼无人机凭借其优异的可靠性及操纵性,获得了民用领域的青睐,成为家喻户晓的高科技产品,但与此同时,多旋翼无人机的劣势也在其广泛应用中越来越受到关注。
多旋翼无人机采用螺旋桨作为升力的来源,但螺旋桨无法改变桨距,使得其气动效率低于直升机旋翼,又加上多个螺旋桨相距较近,会产生较为严重的气动干扰,进一步降低了它的气动效率。所以多旋翼无人机的应用主要集中在载重不大、不需要较高气动效率的场景中,对于有较高气动需求或载重需求的场景中,依旧多用无人直升机。但无人直升机结构复杂,操纵困难以及较难维护,又使得其大规模推广受到限制。这种情况下,我们亟需对多旋翼无人机结构进行改进,让其更符合生产生活的需求。
共轴双旋翼直升机自1945 年成功研制以来,历经半个多世纪的发展,共轴双旋翼的理论得到了不断的完善,如今这种构型已经成为一种较为成熟的直升机构型。尽管共轴双旋翼面临着较大的旋翼气动干扰,气动环境复杂,操纵系统复杂等问题,但其上下反转双旋翼的形式,在不增加机体尺寸的同时有效提升了升力,同时也取消了尾桨,有效减少了直升机尺寸,凭借这一优势,多旋翼无人机也越来越多采用此种构型,提升其气动效率。
此外为进一步提升多旋翼无人机的气动效率,在旋翼的外围增加涵道,通过涵道减小不同轴上的气动干扰。
1.旋翼系统设计
1.1 桨叶设计
由于本文主要为验证共轴双旋翼式无人机旋翼系统的可行性,所以在设计时参考了当前多旋翼无人机市场的一些常见机型,尺寸主要参考某知名品牌的植保无人机T20。为了方便验证,翼型选取NACA0012。表1 为桨叶的具体参数。

表1 桨叶几何参数
1.2 整体设计
本文中采用四轴的结构形式,单轴上为共轴双旋翼结构,为简化机体结构,上下旋翼分别使用不同的电机控制。在主体结构上增加涵道式外壳,用于减少多旋翼无人机不同轴上的气动干扰。
2.旋翼气动性能计算
本文需要对共轴双旋翼进行气动性能计算,由于共轴双旋翼的结构形式,下旋翼处于上旋翼的尾流中,上旋翼处于下旋翼的滑流中,因此上下旋翼有着较大的气动干扰。为了准确分析旋翼的气动特性,必须纳入气动干扰的考虑。
下旋翼处于上旋翼的尾涡中,导致下旋翼处于较为复杂的气动环境中,因此下旋翼的气动计算较为复杂,而在悬停状态下这种影响最为强烈[1];下旋翼对上旋翼的影响主要是流态的影响,其影响较小,和单旋翼的状态相差不多。考虑到这些气动干扰,在对共轴多旋翼进行气动分析时就不能使用叶素理论及滑流理论,应采用涡流理论,计入上下旋翼的气动干扰[2]。涡流理论中有固定尾迹、预定尾迹以及自由尾迹的分析方法。固定尾迹认为每片桨叶的环量半径沿半径方向不变,仅有一个涡环柱,在分析时较为简单,一定程度上反映旋翼的涡环状态,但计算的精度不高。预定尾迹采用实验获得的涡环数据,更加贴近旋翼真实的涡环状态,但需提前获取实验数据。自由尾迹采用计算空气动力学计算旋翼的涡环状态,有着较高的计算精度,也不需要提前获取实验数据,但计算量大,计算难度高。本文主要为验证共轴多旋翼无人机的可行性,主要和普通构型的多旋翼无人机比较分析,不需要太高的计算精度且无试验数据,故采用固定尾迹的方法分析旋翼气动特性。
首先建立涡环柱坐标系如图1所示。
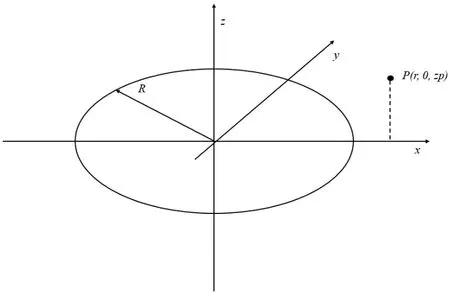
图1 涡环柱坐标系示意图
根据毕奥-萨瓦尔定理可得p点的诱导速度为[3]
本文中,C1,C2的选值为C1=0.99,C2=1.15。对第三类积分精确的计算,采用的是直接积分法。
本文中将桨盘上的涡系离散成有限多个,联合叶素理论推导五个涡柱的表达式为:
式中各诱导速度的系数只和该点到涡柱的相对位置是有关的,因此我们认为这些系数是确定的,对于这个方程组未知量是,显然对于这5个方程来说,是无法解出这6个未知数的,本文采用的方法是给H一个初始值,将方程组变为线性方程组:
求解该方程组,获取5个环量值,根据环量值便可得到任一点的诱导速度,再由求得的诱导速度,可计算得到一个新的H值,设定一个收敛条件,当满足收敛条件时,计算结束。
针对共轴式旋翼系统,可以视为两个单旋翼固定涡系的叠加,因此在计算诱导速度时,要考虑两个涡环柱对该点的影响,因为该点的诱导速度是两个固定涡系的诱导作用总和。
本文计算时,主要考虑旋翼的轴流状态,在该状态下下旋翼只有一部分面积处于上旋翼的滑流里,但上旋翼则完全处在下旋翼的滑流里,在处理过程中,认为共轴旋翼系统的滑流边界和单旋翼结构是一致的[4],因此,直接使用单旋翼的滑流边界带入到本计算中,进一步减轻计算难度,通过计算验证,发现这样处理带来的误差不大,可以接受。
对于前飞情况,考虑到环量沿方位角变化,将环量表示成Fourier 级数的形式,并取到一阶。
同样,也将诱导速度的表达式也表示成Fourier 级数的形式,也取到一阶。
式中
将环量表达式代入到诱导速度的表达式中,最后便可得到各谐波系数的表达式。最终整理涡环量表达式得到线性方程组为
式中,X= [Γ10…Γ50,Γ11c…Γ51c,Γ11s…Γ51s]T。
通过迭代计算,可得到前进比为0.3 时,上下旋翼的拉力系数。
计算结果如图2 和图3 所示。
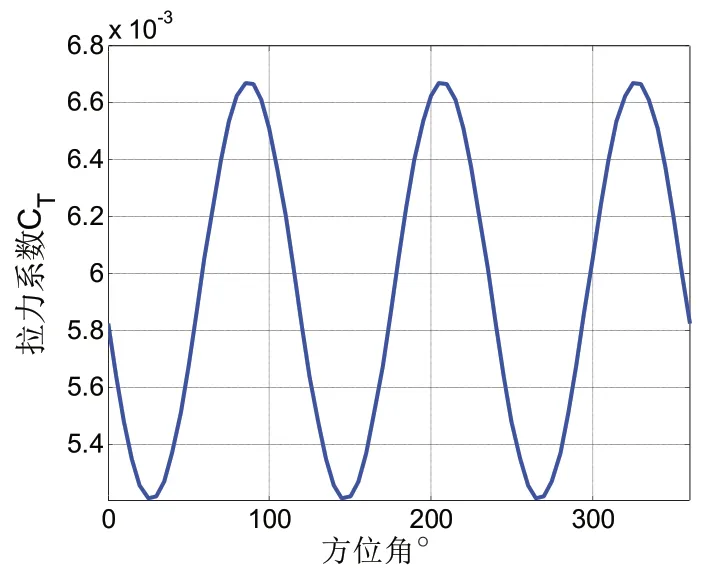
图2 上旋翼拉力系数
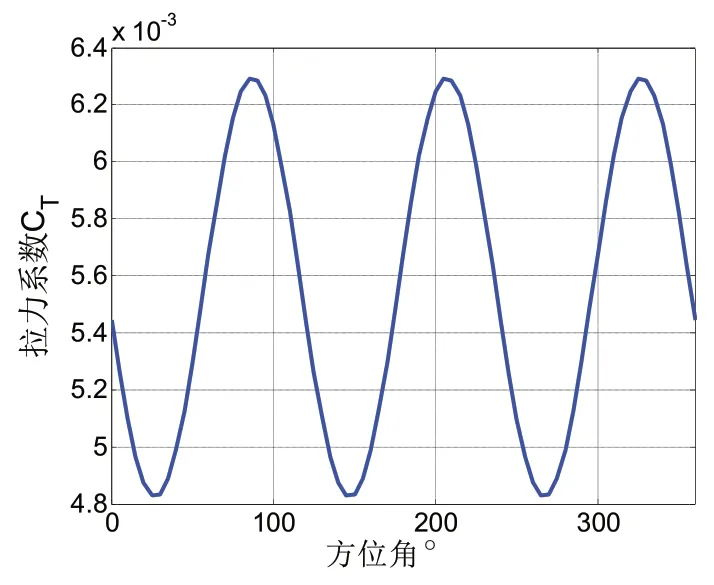
图3 下旋翼拉力系数
根据计算可以看出,多旋翼无人机的拉力有了较大的提升。
3.结语
随着多旋翼无人机的广泛应用,原有的螺旋桨系统由于气动效率较差,越来越无法满足对其性能的需求,本文建立的涵道式共轴多旋翼无人机系统,一定程度上可以解决多旋翼无人机气动效率较差的问题。本文中采用固定涡系理论来对该旋翼系统进行理论计算,具有一定的参考性,未来可使用自由涡系、CFD 等方式进一步验证该方法的有效性。
猜你喜欢
电子设计工程(2022年12期)2022-06-29 06:08:20
数学物理学报(2020年2期)2020-06-02 11:29:10
安顺学院学报(2020年1期)2020-04-05 10:57:20
现代计算机(2019年6期)2019-04-08 00:46:50
北京航空航天大学学报(2018年1期)2018-04-20 06:38:10
北京航空航天大学学报(2017年7期)2017-11-24 05:27:08
北京航空航天大学学报(2017年2期)2017-11-24 05:24:53
北京航空航天大学学报(2017年10期)2017-04-20 08:51:25
物理与工程(2014年4期)2014-02-27 11:23:07
雷达学报(2012年4期)2012-10-03 12:25:02
