一种基于Radon 变换和尾迹模型的尾迹检测算法
2022-06-29 06:08王志鹤喻忠军
电子设计工程 2022年12期
王志鹤,行 坤,崔 宁,喻忠军
(1.中国科学院空天信息创新研究院,北京 100094;2.中国科学院大学电子电气与通信工程学院,北京 100049)
船舶尾迹有助于估计船舶的真实位置、航速和航向等信息[1],因此,准确地进行SAR 图像中船舶尾迹的自动检测具有重要意义。在SAR图像中,船舶尾迹经常表现为亮线或暗线,而Radon 变换可以将图像中的亮暗线转换为变换域中的峰谷值,尾迹检测问题也就变成了峰谷值提取问题,并且Radon 变换的积分过程可以有效地平滑噪声,变换域中的信噪比高于图像域,因此,Radon 变换被广泛运用于SAR 图像中的船舶尾迹检测,但是还面临以下4 个问题:1)非尾迹引起的亮点会极大地影响检测结果;2)积分线上像素点数目不同导致变换域中出现“双X 状亮线”[2];3)尾迹对应的变换域中峰谷值的提取困难;4)只能得到尾迹所在的直线,无法确定起点和方向。
文献[3]采用小波变换抑制图像噪声,再采用Radon 变换检测尾迹。文献[4]首先利用形态成分分离算法分割出图像中的尾迹结构成分,再对尾迹结构成分进行局部Radon 变换,最后通过峰值聚类决策确定尾迹具体位置。文献[5]采用基于Radon 变换的两级低秩加稀疏分解(LRSD)算法以抑制海杂波,实现快速检测海面上的稀疏目标尾迹。文献[6]提出了一种基于小波与Radon 变换的尾迹检测算法。文献[7]采用顶帽变换提高SAR 图像中尾迹与背景的对比度,从而更好地检测尾迹。文献[8-10]提出了一种结合水动力理论的基于Radon 的尾迹检测算法,不同于传统的阈值逻辑,其采用了成对搜索算法(搜索逻辑)提取变换域中的峰谷值点,并通过图像域中的衡量指标剔除虚警,实现了尾迹的高检测率。文献[11-12]将尾迹检测问题转化为基于Radon 变换的稀疏非凸广义极大极小凹(GMC)正则化问题。
该文提出的算法有效克服了前述Radon 变换用于尾迹检测的4 个问题。首先通过引入足够大小的掩膜遮盖船舶在SAR 图像中形成的亮点,去除了其对检测结果的影响;其次通过结合梯度的归一化Radon 算法消除了变换域中“双X 状亮线”的影响,并增强了变换域中的峰谷值;再通过成对搜索算法[8]提取变换域中的峰谷值,得到了候选的尾迹直线;最后通过尾迹本身的特性和额外的船舶信息剔除虚警,得到了真实的尾迹,同时确定了尾迹的起点和方向。
1 尾迹模型
船舶尾迹可分为4 类[13]:1)湍流尾迹;2)窄V 型尾迹;3)开尔文尾迹;4)内波尾迹。在足够粗糙的海面背景上,船舶尾迹附近的海表面波受到抑制,形成了相较背景更为平滑的区域,雷达回波较小,在SAR图像中表现为沿着船迹有一定宽度的暗线状特征,该特征被称为湍流尾迹,是SAR 图像中最常见的尾迹结构。在湍流尾迹的两侧有时可以看到亮线。有两种情况,一种是由小尺度的布拉格散射波产生的,另一种是湍流尾迹的亮边。这里统一将与湍流尾迹夹角在10°范围以内出现的亮线归类为窄V 型尾迹,10°是经验值。开尔文尾迹由横波、发散波和尖波组成,开尔文尾迹表面起伏最大的区域位于船迹两侧16°~19.5°内,在这个区域内横波和发散波相干涉形成尖波,尖波表现为亮线,称为开尔文臂,两侧开尔文臂的夹角约为39°。内波尾迹是船舶行驶过程中,对密度跃层和温度跃层进行扰动产生的,内波尾迹呈现为V 型,但暗波和亮波交替出现,大致与船迹平行。由于船尾产生的尾迹的振幅非常低,所以实际上只能检测到由船首产生的尾迹。
根据上述船舶尾迹研究构建了一个基础的船舶尾迹模型,即中间是一条暗湍流尾迹,两侧可能出现亮窄V 型尾迹和亮开尔文尾迹,内波尾迹形成条件苛刻不考虑,尾迹的交点是船首,如图1(a)所示。其中,Δθv表示窄V 尾迹和湍流尾迹的夹角,范围为0°~10°;Δθk表示开尔文尾迹和湍流尾迹的夹角,范围为16°~19.5°。图1(b)为一幅符合尾迹模型的实际SAR 图像中的船舶尾迹。尾迹模型在变换域中对应的峰谷值具有固定的结构,即中间是一个谷值,两侧可能出现两对峰值。基于该结构提出的成对搜索算法可以有效地提取变换域中尾迹对应的峰谷值。由于湍流尾迹是具有一定宽度的暗平滑区域,其梯度值较小,而窄V 型尾迹表现为窄亮线、开尔文尾迹表现为起伏的波纹,两者的梯度值都较大,如图1(c)所示。梯度值和灰度值大小关系一致,可以利用梯度值改进Radon变换,该文将在2.2节中进行详细阐述。
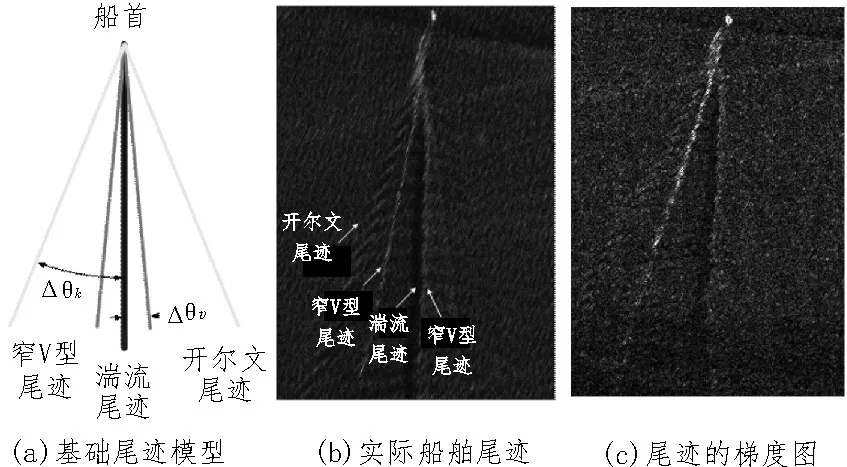
图1 尾迹图像
2 Radon变换
2.1 Radon变换原理
Radon 变换将图像域中的点映射为变换域中的一条曲线,并且同一直线上的点映射的曲线交于同一点,因此Radon 变换可以实现将图像域的一条直线ρ=xcosθ+ysinθ映射成变换域中的一个点(ρ,θ),如图2 所示。连续图像的Radon 变换定义为[14]:

图2 Radon变换示意图

其中,D为整个图像域,f(x,y)为图像上(x,y)像素点的灰度值,ρ为原点到直线的距离,θ为x轴与直线的垂线之间的夹角,δ为Dirac delta 函数。
2.2 结合梯度的归一化Radon算法
由于处理的图像经过预处理后带有掩膜,被遮盖的像素点不参与计算,并且不同直线上的像素点数目各不相同,使得图像域中的直线对于变换域的贡献不均匀。为解决该问题,需要将结果归一化,即每个累加和除以积分路径的实际长度,这样掩膜中像素点不会影响累加结果,并且使每个像素点对于变换域的贡献相同。
文中进一步考虑SAR 图像中尾迹的梯度特性,湍流尾迹上的像素点梯度值比背景梯度值小,窄V型尾迹和开尔文尾迹梯度值比背景梯度值大。这与尾迹的灰度值与背景的灰度值关系一致,可以利用梯度值调节每个像素点的贡献值,增强变换域中的峰谷值,使其更易被检测到。结合梯度的归一化,Radon 算法步骤可总结如下:
1)得到结合梯度的Radon 变换结果R如下:

其中,D为整个图像域,M为掩膜,D-M表示在掩膜上的像素点不参与计算,g(x,y)为像素点(x,y)的梯度值。
2)计算带掩膜图像的直线长度,统计空间L表示每个单元(ρ,θ)的积分线长度,L计算式如下:

3)对变换结果R进行归一化处理,得到最终结合梯度的归一化Radon 变换Rnor为:

3 尾迹检测算法
文中提出的算法考虑实际情况,直接处理大尺度的SAR 图像,主要分为3 步:预处理、尾迹检测和尾迹验证。算法流程图如图3 所示。

图3 算法流程图
3.1 预处理
预处理分为3 个步:定位、初步提取船舶信息和掩膜。
1)定位:在大幅SAR 图像定位可能出现尾迹的区域,首先需要进行船舶检测,文中采用文献[15]提出的CFAR 检测器。其次,生成以船舶为中心的图像子块,该图形子块应足够大,以包含船舶尾迹,同时又不应过大,以免导致图像中包含过多的干扰信息。图像子块的大小一般取M=3 000/rs,实验结果表明,该尺寸包含足够的尾迹信息,其中,rs为SAR 图像分辨率,单位为m。
2)初步提取船舶信息:利用最小外接矩形算法[16]处理CFAR检测后得到的二值图像,可以预估船舶的长、宽和航向,船舶外接矩形的长边方向即预估的航向。这里得到的航向是湍流尾迹的衡量指标之一,因为湍流尾迹方向也表示船舶航向,所以两者的角度差不会很大,该指标可以有效剔除虚警。因为湍流尾迹预估的航向更为准确,所以航向以湍流尾迹方向为准。
3)掩膜:非尾迹引起的亮点会对基于Radon 变换的算法检测结果造成不利的影响,可以用矩形掩膜直接遮盖住这些亮点。该掩膜是以船舶为中心的矩形,在方位向上的大小是2a,其中,a是利用预估的船舶最大航速和SAR 辅助数据估计的最大预期方位偏移[8]。若处理的SAR 图像没有足够的辅助数据,则可简单地根据图像子块尺寸M得到a[11],文中取a=M/8。在距离向上的大小是3r,r是船舶在距离向上的长度,可以根据船舶外接矩形得到。带掩膜的图像子块如图4所示,图像横轴为距离向,纵轴为方位向。

图4 带掩膜的图像子块
3.2 尾迹检测
尾迹检测分为3 部分:
1)利用结合梯度的归一化Radon 算法对带掩膜的图像子块进行处理,得到变换域图像。
2)限定搜索区域,船舶产生的尾迹对应的峰谷值,只可能出现在变换域图像(横轴为夹角θ,纵轴为距离ρ)中的两条正弦曲线之间的限定区域内,曲线公式如下:

其中,a是3.1 节提到的最大预期方位偏移,式中加上a/5 是防止曲线起点和终点处的峰谷值被遗漏。
3)成对搜索算法提取变换域图像中的峰谷值,得到候选尾迹直线。
文献[8]提出的成对搜索算法的核心思路是认为船舶尾迹具有一个基础尾迹模型,变换域中存在可能的一个谷值点和4 个峰值点,分别对应可能成像的尾流结构:暗湍流尾迹、两个亮窄V型尾迹和两个亮开尔文尾迹。首先在变换域中搜索出一个灰度值差异最大的点对,对应于湍流尾迹和一个窄V型尾迹(这里定义为第一个窄V 型尾迹)。根据尾迹模型,两者夹角在10°范围内,取大小为10°的窗口内灰度的最大值fmax和最小值fmin计算差值,与文献[8]不同的是,文中提出的算法采用的是根据式(6)算出的加权差值diff:

其中,g1、g2是权值,用于调节暗尾迹和亮尾迹对加权差值贡献的比重,因为有时图像中亮线(可能是亮尾迹或海洋现象)过于明亮,导致窗口内的最大值过大,其差值超过了真正的湍流尾迹和窄V 型尾迹对应的点对的差值,从而出现误检,所以取g2>g1偏重于最小值fmin,可以有效地避免这种情况。然后搜索第二个窄V 型尾迹,在以谷值点为中心的第一个窄V 型尾迹的对称侧。最后搜索开尔文尾迹,在以谷值点为中心的两侧,根据尾迹模型,开尔文尾迹和湍流尾迹的夹角范围为16°~19.5°,窗口大小取16°~19.5°。
3.3 尾迹验证
尾迹检测得到的结果是变换域图像中的5 个点,每个点用坐标(ρ,θ)表示,对应图像域中的5 条直线,即候选的尾迹直线,必须验证是否是真正的尾迹结构。验证的基本思路:湍流尾迹上的像素点的灰度值要比背景均值小,并且湍流尾迹方向为船舶航向;窄V 型尾迹和开尔文尾迹上像素点的灰度值比背景均值大,并且开尔文尾迹上像素点的梯度值比背景梯度均值大。这里额外在梯度图上对开尔文尾迹进行验证,是因为开尔文尾迹表现为上下起伏的波纹,有时其像素点并不明亮,但是波纹起伏明显时梯度值较大。根据以上描述确定衡量指标θd、fm和gm。θd=abs(θt-θr),fm=Iw/I-1,gm=gw/g-1,其中,θr为船舶外接矩形的长边与距离向之间角度,θt为候选湍流尾迹直线与距离向之间的角度,Iw为候选尾迹上像素点的平均灰度值,gw为候选尾迹上像素点梯度的平均灰度值,I为整个图像子块的平均灰度值,g为整个图像子块梯度图的平均值。
值得注意的是,真实的尾迹是起始于船舶位置的半直线,需要确定尾迹的起点和方向。为此,通过船舶中心位置的平行于方位向的直线和候选尾迹直线的交点,将候选尾迹直线分割为两个半直线,这样将得到10 条半直线作为候选的尾迹。验证步骤如下:
1)确定湍流尾迹。首先衡量是否满足指标θd<30°,其次选择平均灰度值较低的候选湍流尾迹半直线,最后如果该半直线的衡量指标fm<-0.05,则确定为湍流尾迹。若未检测出湍流尾迹,则认为整个图像子块中无尾迹。
2)确定窄V型尾迹。选择位于湍流尾迹两侧±45°内的候选窄V 型尾迹半直线,如果该半直线的衡量指标fm>0.1,则确定为窄V 型尾迹。
3)确定开尔文尾迹。同样选择位于湍流尾迹两侧±45°内的候选开尔文尾迹半直线,如果该半直线的衡量指标fm>0.2或者gm>0.3,则确定为开尔文尾迹。
尾迹的起点是上述分割候选尾迹直线的交点,根据交点位置,并将衡量指标fm作为权值加权,可以求得尾迹顶点,该尾迹顶点可以用于预估船舶的真实位置。考虑到SAR 图像中船舶成像有时会发生方位向偏移,如图5 所示,所以CFAR 检测出的船舶位置并不是真实位置,而尾迹顶点可以更为准确地表示船舶真实位置。
4 实际图像处理结果
文中对一幅1 233×2 151像素大小的TerraSar-X SAR图像进行船舶尾迹检测。SAR图像如图5所示。
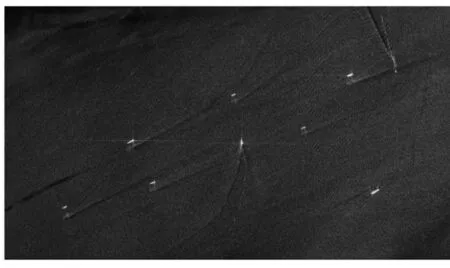
图5 SAR图像
该图像尺寸较大,首先需要通过CFAR 检测器确定船舶的位置,并生成以船舶位置为中心的图像子块,以定位可能出现尾迹的较小区域。图像分辨率未知,图像子块大小取M=3 km/5 m=600。一共得到9 幅图像子块,都包含尾迹。因为该SAR 图像没有足够的辅助数据,则简单地认为遮盖船舶的掩膜方位向尺寸为a=M/8。图6 是被检测到的第一艘船的图像子块,图6(a)为原始图像子块,外接矩形框选出船舶;图6(b)为带掩膜的图像子块。
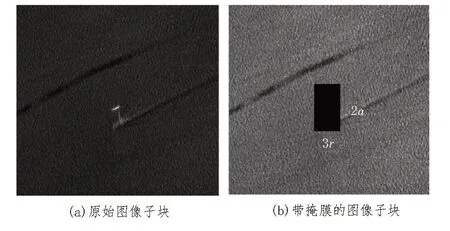
图6 第1艘船的图像子块
然后,对带掩膜的图像子块作结合梯度的归一化Radon 变换,得到变换域图像。图7 是第一艘船的图像子块的变换域图像,图7(a)为未作归一化的变换域图像,可以看到双X 状亮线和掩膜导致的暗伪影,图7(b)为归一化后的变换域图像,暗伪影和“双X 状亮线”被明显抑制。
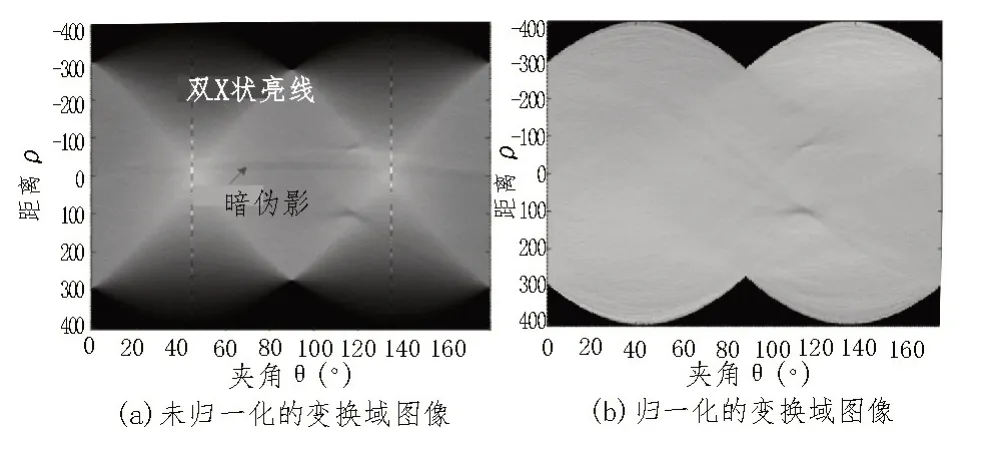
图7 变换域图像
其次,利用成对搜索算法提取变换域图像中的峰谷值点,权值g1、g2分别取0.2 和0.8。搜索区域限定在两条正弦曲线之内。成对搜索算法检测结果如图8 所示,其中三角形对应为湍流尾迹,正方形对应为两条窄V 尾迹,圆形对应为两条开尔文尾迹。
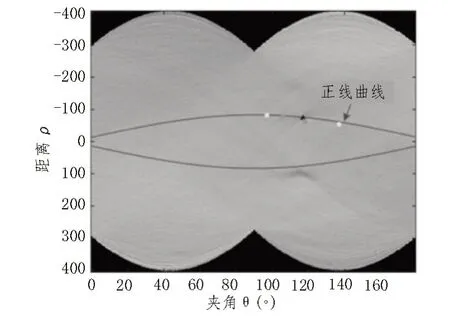
图8 成对搜索算法检测结果图
最后,进行尾迹验证,5 个峰谷值点对应的图像域中候选尾迹直线如图9(a)所示,图9(a)中1 号线为候选湍流尾迹,2 号线为候选的第一条窄V 尾迹,3号线为候选的第二条窄V 尾迹,5 号线为候选的第一条开尔文尾迹,4 号线为候选的第二条开尔文尾迹。图9(b)为经过尾迹验证后得到的最终尾迹检测结果,可以看到,其有效地检测到湍流尾迹、一条窄V型尾迹(湍流尾迹的亮边)和一条开尔文尾迹,并且确定了尾迹的起点和方向。加权求得尾迹的顶点为图9(b)中的叉形所在位置。

图9 尾迹验证结果图
9 幅图像子块的尾迹目测情况汇总如表1 所示,1 表示可见,0 表示不可见。尾迹检测情况较为复杂,检测出的尾迹分为3 类:Tc表示检测出目测可见的尾迹,并且位置正确,Fc表示检测出尾迹但是位置错误,Fa表示检测出目测不可见的尾迹。未检测出尾迹分为两类:Td表示未检测出目测不可见的尾迹,Fd表示未检测出目测可见的尾迹。Tc和Td值越大,算法性能越好,检测准确率定义为P=(Tc+Td)/(Tc+Fc+Fa+Td+Fd),算法结果对比如表2 所示。实验结果表明,文中算法可以有效地检测船舶尾迹,并且优于文献[8]的算法。

表1 尾迹目测情况汇总表
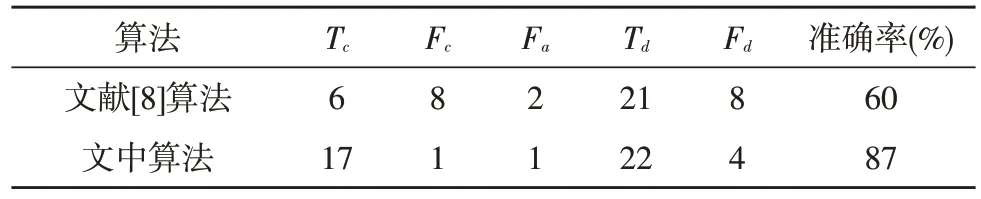
表2 算法结果对比表
5 结论
文中提出了一种基于Radon 变换和尾迹模型的船舶尾迹检测算法,首先,通过船舶检测定位尾迹区域,取适当大小的图像子块分别进行结合梯度的归一化Radon 变换;然后,采用成对搜索算法提取变换域中的峰谷值点;最后,对候选尾迹进行验证,实现船舶尾迹的高概率检测。该算法克服了传统Radon变换无法判断尾迹起点和方向,以及变换域中峰谷值点提取困难的缺点,并且实测结果表明,该算法的检测率较高、虚警率较低。而对于一幅图像中同时出现多艘船尾迹的情况(8、9 号尾迹),仍然可以准确地检测出尾迹结构,表明该算法具有一定的鲁棒性。由于该算法基于尾迹模型,如果船舶尾迹结构与模型完全不同,则无法有效地进行检测,并且对于弯曲尾迹(5 号尾迹)确定的尾迹顶点位置不准确。未来将针对以上情况对算法作进一步改进,并处理多幅不同波段SAR 图像中的船舶尾迹,以检验算法的普适性。
猜你喜欢
空气动力学学报(2022年2期)2022-11-16
舰船科学技术(2022年11期)2022-07-15
九江学院学报(自然科学版)(2022年2期)2022-07-02
舰船科学技术(2022年10期)2022-06-17
船舶(2021年4期)2021-09-07
科学与财富(2021年35期)2021-05-10
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
福建基础教育研究(2019年3期)2019-05-28
西部资源(2018年1期)2018-11-01
国外科技新书评介(2014年12期)2015-01-05