基于模型预测的主动前轮转向与直接横摆力偶矩协同控制研究
2023-01-31 02:09:58李波李双双白艳飞张国党邵帅
汽车技术 2023年1期
李波 李双双 白艳飞 张国党 邵帅
(北京新能源汽车股份有限公司,北京 100176)
主题词:汽车动力学 侧向稳定性 模型预测 协同控制
1 前言
车辆动力学控制作为汽车底盘智能安全系统的重要保障,是高速自动驾驶的研究难点[1-3]。
Van Zanten 等较早提出了直接横摆力偶矩控制(Direct Yaw-moment Control,DYC)的概念[4]。而后,国内外学者围绕DYC扩稳理论及控制算法展开了大量研究。Li 等将汽车动力学状态划分为稳定、欠稳定、失稳临界及失稳等集合,促进了扩稳理论的应用及发展[5]。常见DYC 方法还包括模糊逻辑控制[6]及模型预测控制(Model Predictive Control,MPC)[7]等。Beal 等采用MPC算法将车辆运动约束于稳定区域内,实现了有限人为干预下的车辆稳定性控制[8]。尽管DYC 在临界失稳状态下具有较大干预潜能,但其会导致车辆部分动力性能暂时丧失。
除DYC 外,主动前轮转向(Active Front Steering,AFS)亦能通过修正前轮转角改善操纵稳定性[9],其核心在于控制策略及算法设计,涉及反馈控制[10]、滑模控制(Sliding Mode Control,SMC)[11]、MPC[12]等方法。郭孔辉团队改进了线性时变MPC算法,仿真结果表明,改进算法可显著提高AFS横向动力学临界失稳阈值[13]。然而,当横向加速度过大、轮胎特性呈现较强的非线性特征时,AFS控制效能可能急剧恶化[14]。
DYC 及AFS 协同进行车辆稳定性控制有望发挥最优的横向动力学控制性能[15]。学者对非光滑最优控制[16]、鲁棒模糊控制[17]等在AFS及DYC协同控制器设计中的应用展开了研究。但是所述控制算法无法预测车辆运动状态和进行超前干预控制,因而实用性较差[18]。MPC能滚动预测并优化系统未来状态,已应用于DYC、AFS、制动能量回收等领域,但将其用于DYC 及AFS 协同控制中的研究仍不够充分。
基于此,本文针对汽车横向动力学稳定性控制问题,设计包含决策层和执行层的控制系统。上层采用MPC 方法获取预期附加横摆力偶矩,下层构建AFS 与DYC 协同控制策略对前轮转角及其制动压力进行分配。最后,通过仿真验证DYC-AFS 协同控制算法在中低附着路面工况下的有效性。
2 车辆动力学建模分析
选取质心作为车身坐标系原点,建立二自由度车辆模型如图1所示,其中OXY为大地参考系,Cxy为车辆参考系。

图1 二自由度车辆模型
假设转向过程中质心处纵向车速vx基本不变,根据力与力矩平衡定律,有:

式中,m、Iz分别为整车整备质量和绕z轴转动惯量;lf、lr分别为质心与前、后轴的距离;δf为前轮转角;Fyf、Fyr分别为地面对前、后轮的侧向作用力;vy为质心处横向车速;ω为横摆角速度。
设路面附着系数为μ,当δf较小且车辆质心处侧向加速度小于0.5μg时,轮胎特性可近似认为处于线性区域[5],满足关系:

式中,kf、kr分别为前、后轴侧偏刚度;αf、αr分别为前、后轮侧偏角;β为车身侧偏角。
注意到侧向车速与车身侧偏角满足关系:

由此可得车身侧偏角和横摆角速度的描述方程分别为:

在侧向加速度较小时,利用稳态回转工况下横摆角速度响应公式,可近似得到车身侧偏角和横摆角速度:

式中,l=lf+lr为整车轴距;K=m(lf/kr-lr/kf)/l2为稳定性因子。
考虑路面附着情况及系统时滞,在线性稳定的动力学区域内,车身侧偏角名义值βn及横摆角速度名义值ωn分别满足[19]:

式中,Tβ、Tω均为惯性时间常数;L-1()为反拉普拉斯(Laplace)变换算子;s为复变量;*表示卷积运算。
经验证,在线性稳定的车辆动力学工况下,式(7)和式(8)的计算结果与27自由度车辆模型基本吻合,能较好地反映驾驶员输入所期望的整车动力学关键状态[19]。
3 AFS与DYC协同控制器
3.1 控制器架构设计
基于MPC算法设计AFS与DYC协同控制器用于汽车横向动力学稳定性控制的核心思想在于:根据转向盘或前轮转角输入,获取能使车辆保持动力学稳定性的期望运动状态作为参考状态;为保持当前状态车辆稳定,基于决策层MPC 滚动优化得到所需附加横摆力偶矩,并输入执行层协调AFS 及DYC 子系统,进而修正前轮转角并分配各轮缸制动压力,实现修正整车横向动力学响应的目标。
控制系统决策层和执行层流程示意及各I/O接口参数或变量如图2所示。

图2 基于MPC的AFS及DYC协调控制系统决策层及执行层流程示意
3.2 决策层MPC算法
研究对象的描述方程式(5)、式(6)可进一步改写为状态空间表达式:
式中,ΔM为附加横摆力偶矩。
选取状态变量为x=(β,ω)T,控制变量为u=ΔM,式(11)可简写为:

式中,At、Bt、Et分别为状态转移矩阵、控制矩阵和转角系数矩阵。
设参考状态变量为xr=(βr,ωr)T,βr为车身侧偏角参考值,ωr为横摆角速度参考值,参考控制变量为ur=ΔMr及参考前轮转角δf,r=δf,其中ΔMr为参考附加横摆力偶矩,令状态偏差为,控制偏差为,则式(12)转化为:

采用前向差分方法对式(13)离散化得:

式中,Ak=I+TAt为离散状态矩阵;Bk=TBt为离散控制矩阵;T为采样时间间隔。
式(14)即为被控系统的状态预测方程。
设预测时域和控制时域分别为Np和Nc,则决策层MPC算法的优化目标代价函数定义为:

式中,Q、R分别为状态和控制变量的权系数矩阵。
假设Np≥Nc,且Ak和Bk均为常矩阵(即Ak=A,Bk=B),则在预测时域Np内有状态转移方程:
由式(15)和式(16)化简得到优化问题:

式中,umin和umax分别为控制变量u的最小值和最大值。
求解上述MPC滚动优化问题即可获得期望附加横摆力偶矩ΔM,以用于执行层协同控制。
3.3 执行层AFS与DYC协同算法
3.3.1 动力学稳定性判别准则
AFS 和DYC 均直接或间接地通过附加横摆力偶矩来控制车辆的行驶稳定性。AFS 对前轮转角的修正仅能在小范围内进行,对横向稳定性的干预控制有限。处于临界失稳状态时,DYC 应及时介入对各轮缸建压产生制动力,尽量维护车辆横摆动力学的稳定[14]。
据此,定义动力学稳定性因数为:

式中,λ为权重分配系数。
设由AFS 过渡到DYC 干预控制的阈值为εth:当ε≤εth时,所需附加横摆力偶矩主要由AFS 子系统执行层修正前轮转角产生;当ε>εth时,DYC对车辆横向稳定性控制起主导作用,以实现及时反馈干预。转向过程中,当AFS和DYC触发附加横摆力偶矩时,忽略轮胎侧偏角,地面对汽车各轮作用力如图3所示。

图3 附加横摆力偶矩作用示意
3.3.2 AFS协同子系统
当决策层MPC 求解得到附加横摆力偶矩ΔM且ε≤εth时,由图3可知力矩计算关系:

式中,Fyfl、Fyfr、Fyrl、Fyrr分别为左前、右前、左后、右后轮受到的地面作用力;δfl、δfr分别为左前、右前轮转角;ΔMAFS为需由AFS子系统提供的附加横摆力偶矩。
假设道路曲率较小时满足δfl=δfr=δf,AFS,且两侧前轮及后轮的侧偏角分别近似相等:
式中,δf,AFS为AFS触发时的总前轮转角。
考虑侧向加速度不太大的情形,各轮胎侧向力为:

式中,i=f,r 分别表示前、后轮,j=l,r 分别表示左、右轮;kij为相应轮胎的侧偏刚度,忽略垂向载荷转移的影响;αij为相应轮胎的侧偏角。
由式(18)~式(21)可得总前轮转角:

则AFS对前轮转角的修正量为:

3.3.3 DYC协同子系统
当ε>εth时,决策层MPC 求解得到附加横摆力偶矩ΔM后,由图3可得:

式中,Fbfl、Fbfr、Fbrl、Fbrr分别为由DYC 引起的地面对各轮胎作用力;bfl、bfr、brl、brr分别为各地面作用力对车辆质心的力臂。
当所需ΔMDYC>0 时,优先对左后轮施加制动力矩,力矩不足时再对左前轮施加额外制动力矩,左侧轮胎作用力分配关系满足:

式中,hg为车辆质心距地面高度;Bf、Br分别为车辆前、后轴的轮距。
类似地,当ΔMDYC<0 时,右侧轮胎作用力分配关系满足:

各轮缸压力与地面制动力满足关系:

式中,Kbij为相应车轮的制动力矩系数;pij为作用于相应车轮的制动压力;reij为相应车轮的滚动半径。
至此,得到轮缸压力。
4 结果分析及讨论
4.1 验证环境
采用CarSim 与MATLAB/Simulink 联合仿真方式验证本文基于MPC 的AFS 与DYC 协调控制算法,验证工况选为典型的低附着双移线(Double Lane Change,DLC)工况。所选车辆参数及路面条件如表1 所示,本文分别讨论路面附着系数为0.25 和0.40 时,车辆DLC工况下MPC策略对车辆动力学稳定性的控制效果。
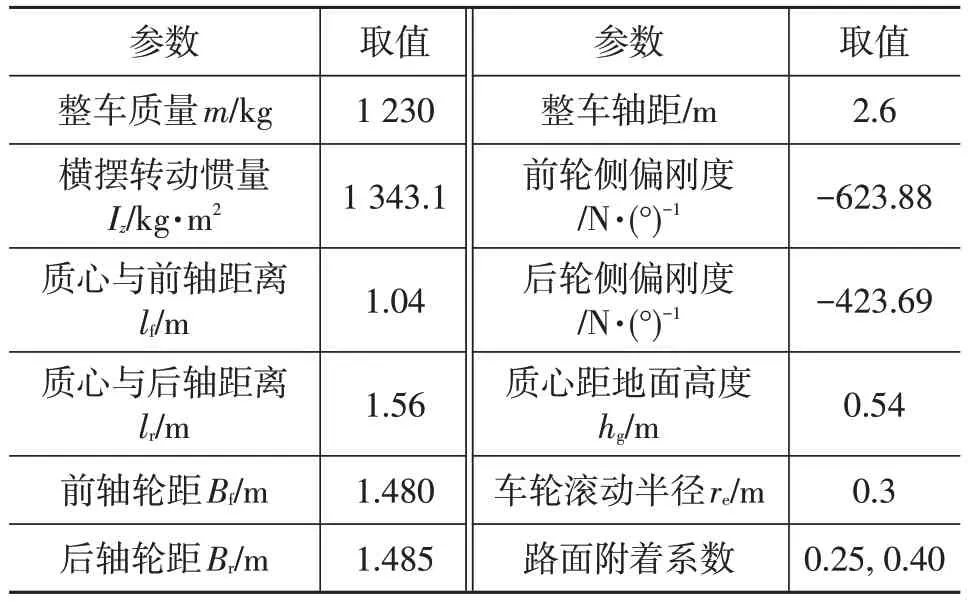
表1 车辆参数及道路条件
4.2 结果讨论
图4给出了采用与未采用MPC策略时车辆侧向加速度的变化趋势(路面附着为0.25)。可以看出,车辆行驶前6 s内,2种工况下的车辆侧向加速度基本吻合;而在第9~15 s 时间段内,侧向加速度最大值达到-6.07 m/s2,且最终未恢复至0附近,表明在DLC工况过程中车辆已失去横向稳定性。

图4 车辆侧向加速度变化情况对比(附着系数为0.25)
图5 和图6 分别给出了采用与未采用MPC 策略时车身侧偏角及横摆角速度的变化趋势(路面附着系数为0.25)。未采用MPC策略时,与图4对比可以看出:在第3~6 s时间段内车身侧偏角已超过15°、横摆角速度已低至-27.6(°)/s,车辆实际上已逐渐进入临界稳定状态;而在第6 s 后,车身侧偏角及横摆角速度变化率均急剧增加,表明车辆已经完全丧失了操纵稳定性。采用MPC策略加以控制后,在整个行驶时间内,车身侧偏角和横摆角速度分别稳定在-3.5°~3.5°与-16~16(°)/s 范围内,DLC工况下车辆横向稳定性得到明显改善。
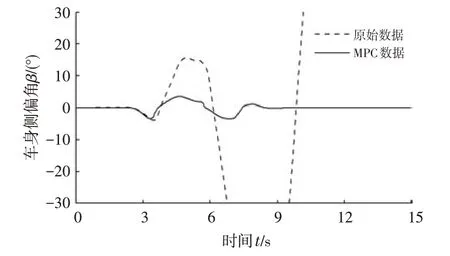
图5 车身侧偏角变化情况对比(附着系数为0.25)
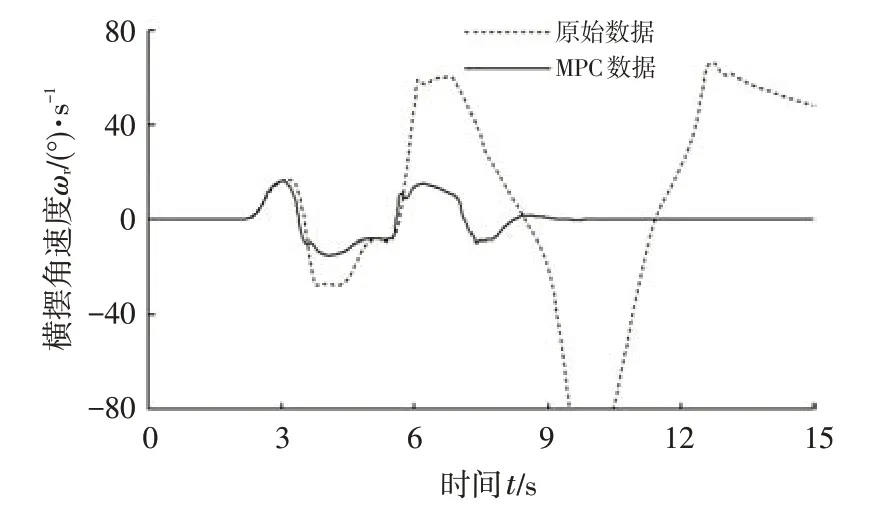
图6 横摆角速度变化情况对比(附着系数为0.25)
图7 给出了采用与未采用MPC 策略时车辆纵向速度的变化趋势(路面附着系数为0.25)。可以看出,未采用MPC策略时,在前6 s内,纵向车速由88 km/h缓慢降低而后急剧减小,尽管第10 s附近恢复至初始纵向车速的59.4%,但因为此时车身侧偏角和横摆角速度变化率过大,车辆已经丧失操纵稳定性,所以纵向车速骤降至0附近。采用MPC策略后,车辆纵向车速基本稳定于初始速度88 km/h 附近,这表明该控制策略有助于提高车辆在DLC工况下的操纵稳定性。
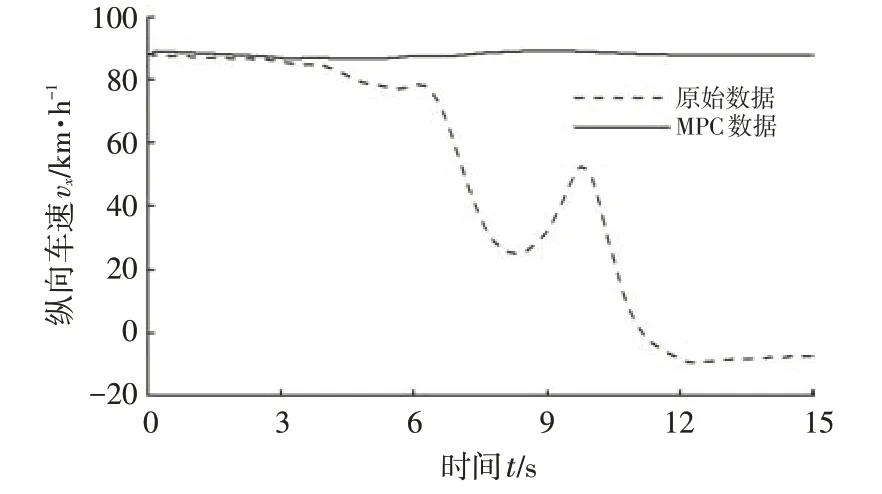
图7 车辆纵向速度变化情况对比(附着系数为0.25)
图8 和图9 分别给出了车辆纵向速度和侧向加速度、横摆角速度和车身侧偏角的对比曲线(路面附着系数为0.40)。由图8、图9可见,未采用MPC策略时,车辆在DLC 工况下约第5 s 以后纵向速度出现衰减波动,约第6 s 后加速度出现急剧波动,横摆角速度和车身侧偏角均出现了渐扩振荡,且随时间推移,振荡幅度进一步增大。采用MPC策略后,纵向车速可维持在90 km/h附近,侧向加速度可保持在0 附近,车辆横摆角速度和车身侧偏角分别稳定于-25~25(°)/s 和-2.5°~2.5°范围内,侧向稳定性得到明显改善。
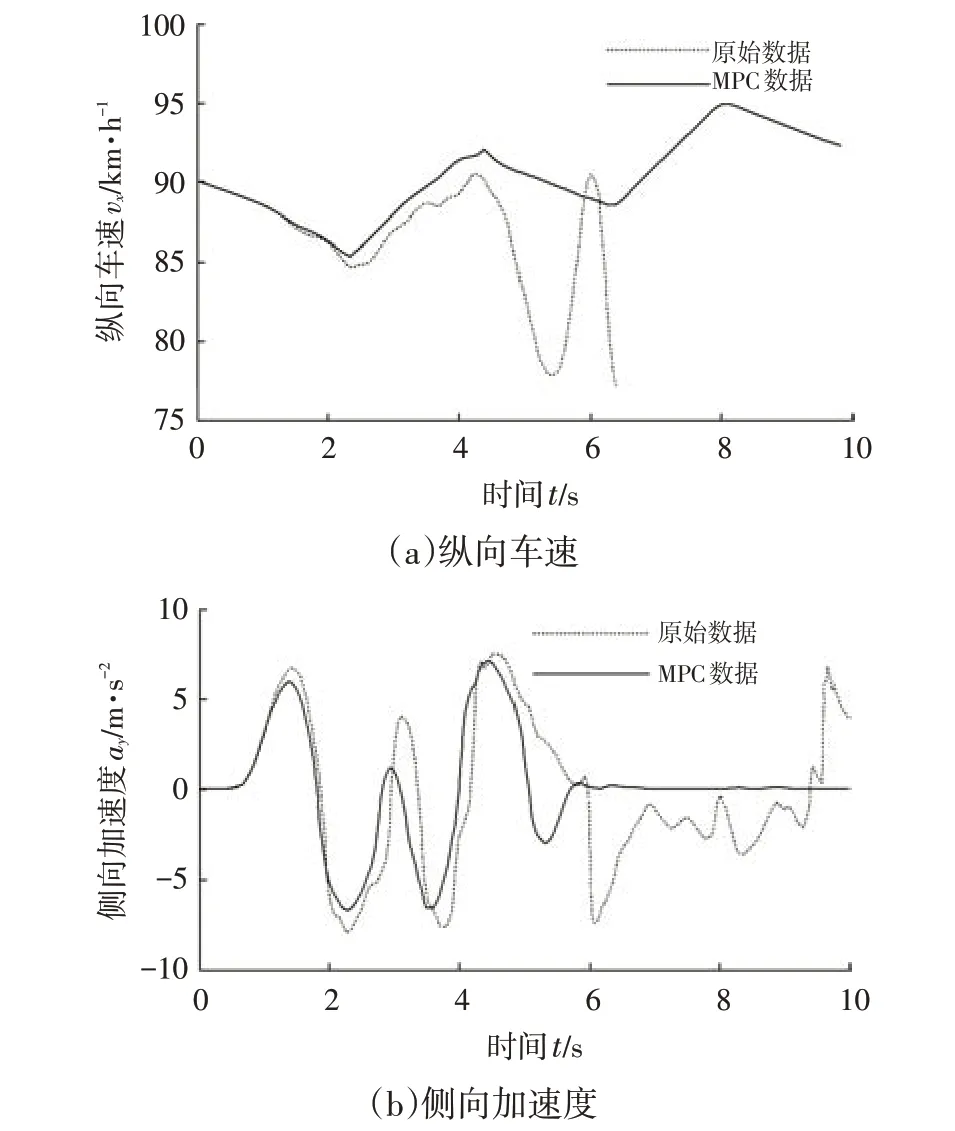
图8 车辆纵向速度和侧向加速度对比(附着系数为0.40)
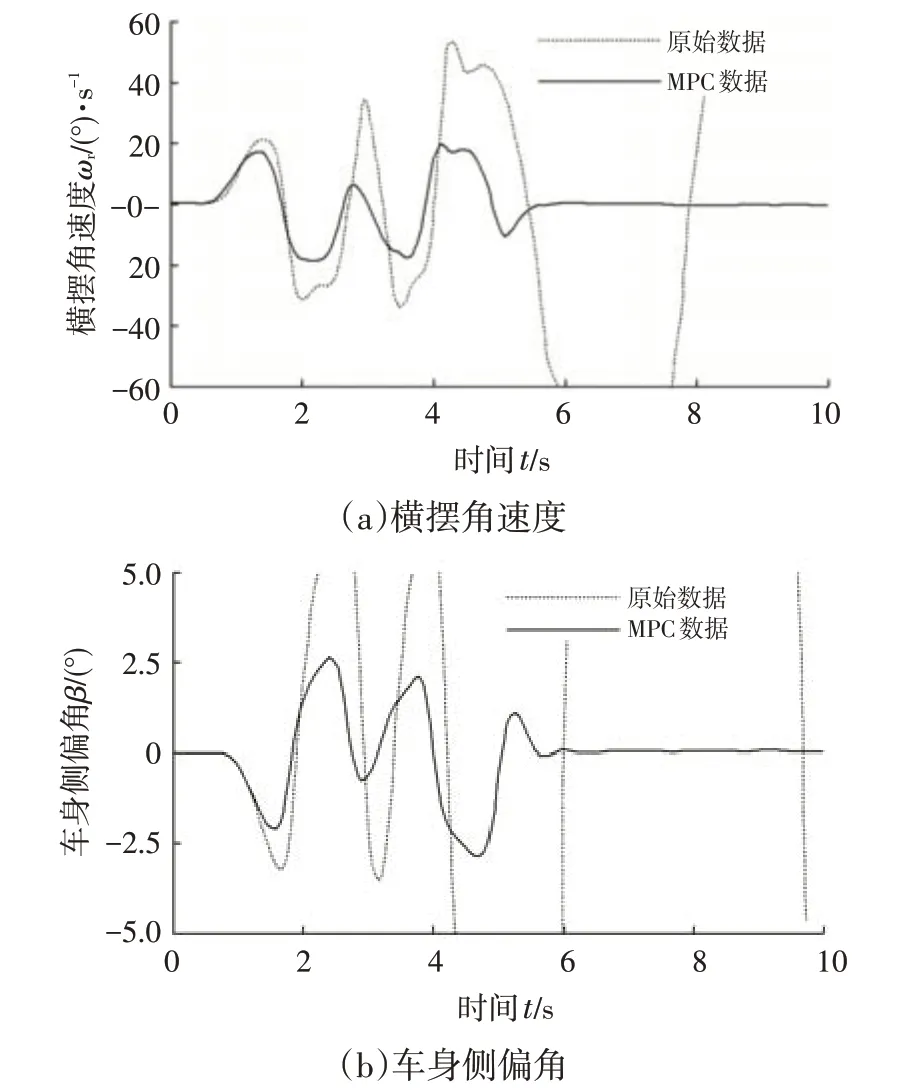
图9 横摆角速度和车身侧偏角对比(附着系数为0.40)
图10 给出了车辆行驶轨迹的对比曲线(路面附着系数为0.40)。可以看出,采用MPC 策略后,车辆在纵向距离100 m 和155 m 附近的侧向偏差分别减少37.5%和41.8%,实际行驶路径基本符合期望轨迹,表明该协同控制策略可明显改善车辆的动力学稳定性。
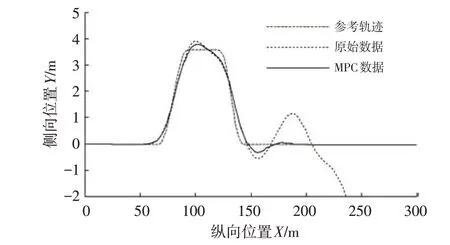
图10 车辆行驶轨迹对比(附着系数为0.40)
5 结束语
本文针对车辆侧向动力学稳定性控制问题,构建了基于MPC 的双层AFS 与DYC 协同控制器,决策层采用MPC 算法优化获得附加横摆力偶矩,执行层根据所优化的横摆力偶矩,采用AFS 与DYC 协调控制分配前轮附加转角或各轮缸制动压力,最后基于CarSim 和MATLAB/Simulink 联合仿真验证了该协同控制器在路面附着系数为0.25及0.40条件下的控制效果。
结果表明:在中低附着系数路面条件下,与无控制时对比,基于MPC的AFS-DYC 双层协调控制器可有效保持车辆DLC 工况下纵向车速不降低,并将车身侧偏角和横摆角速度抑制于稳定行驶范围内,进而减小行驶轨迹的横向偏差,因此该控制器可显著改善车辆操纵稳定性,明显提升横向动力学稳定性,最终抑制车辆由临界失稳态进入不可控的失稳态。
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:39:40
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
物理教学探讨(2018年1期)2018-02-13 09:26:52
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
中国铁道科学(2015年4期)2015-06-21 06:46:06
农机使用与维修(2014年11期)2014-11-18 01:32:07
中国自行车·骑行风尚(2014年4期)2014-10-10 05:00:14