
摆线泵转子齿形仿真优化设计
2022-11-24 07:21杨军杰李重伯
西安航空学院学报 2022年3期
冯 涛,杨军杰,李重伯,文 杰
(中国航发西安动力控制科技有限公司, 西安 710077)
摆线泵的内外转子齿轮在相互摩擦、接触、碰撞下高速运转,其主要的失效形式是齿面磨损点蚀及疲劳[1],理论计算和传统的有限元分析方法都难以对该动态过程进行分析评估。而且外转子齿形倒角的大小对齿面接触应力和油液的流动都存在较大影响,但齿形倒角大小的选取往往也难以通过计算获得。较小的齿形倒角可使内外转子间存在较大的运动空间从而使接触应力降低,但过大间隙使油液流动不充分造成困油现象加剧[2];较大的齿形倒角能够降低困油现象但会使接触应力升高容易造成齿面失效。如何获得理想的齿形倒角是所要解决的问题。
本文利用多体动力学仿真软件RecurDyn建立摆线泵的运动模型,并将外转子作为刚性体,内转子划分为柔性体(即考虑在外力作用下发生的弹性变形),确定接触参数,利用刚柔耦合接触分析的方法模拟摆线泵在给定转速和负载下内外转子齿面运动接触过程,仿真获得了内转子齿面在整个啮合运动过程中接触应力变化情况及最大应力点的位置和其应力值,并通过取不同转子的齿形倒角多次仿真对比应力大小,确定了合适的齿形参数,为齿形设计和优化提供了依据。
1 摆线泵内外转子受力分析
1.1 摆线泵结构组成
图1所示为某摆线转子泵结构。该泵主要由内齿轮(即内转子)、外齿轮(即外转子)、传动轴、壳体和端盖组成,其中壳体和端盖在图1中未显示。
内外转子是不同心的,其偏心距为e。内转子是主动轮,随传动轴转动。外转子为从动轮,其外圆柱面和定子以微小间隙相配合。内转子和外转子齿数不同,因偏心距使内外转子的转动存在速度差,转子在一侧啮合另一侧分离产生吸油和压油的动作过程[3]。
1.2 摆线泵转子啮合受力分析
图2为内啮合摆线转子泵内外转子的受力示意图。图中O1、O2分别为内外转子的中心,内转子在传动轴带动下和外转子沿逆时针方向旋转,内转子受转轴支撑力Fs1、啮合点的啮合接触力Fn1、挤压油液产生的液压力Fp1、转轴输入扭矩Ms1、油液阻力矩Mp1,内外转子间靠啮合力传动,外转子受相应载荷Mf2。内外转子啮合接触力载荷对转子的影响远大于型腔的油压以及摩擦力,因此主要考虑内外转子啮合接触载荷。
当转子转速达到平稳时,内转子O1点的力矩平衡表达式为:
Ms1=Mp1+Mn1+Mf1
(1)
外转子O2点的力矩平衡表达式为:
Mn2=Mp2+Mf2
(2)
其中各符号代表的意义如表1所示。
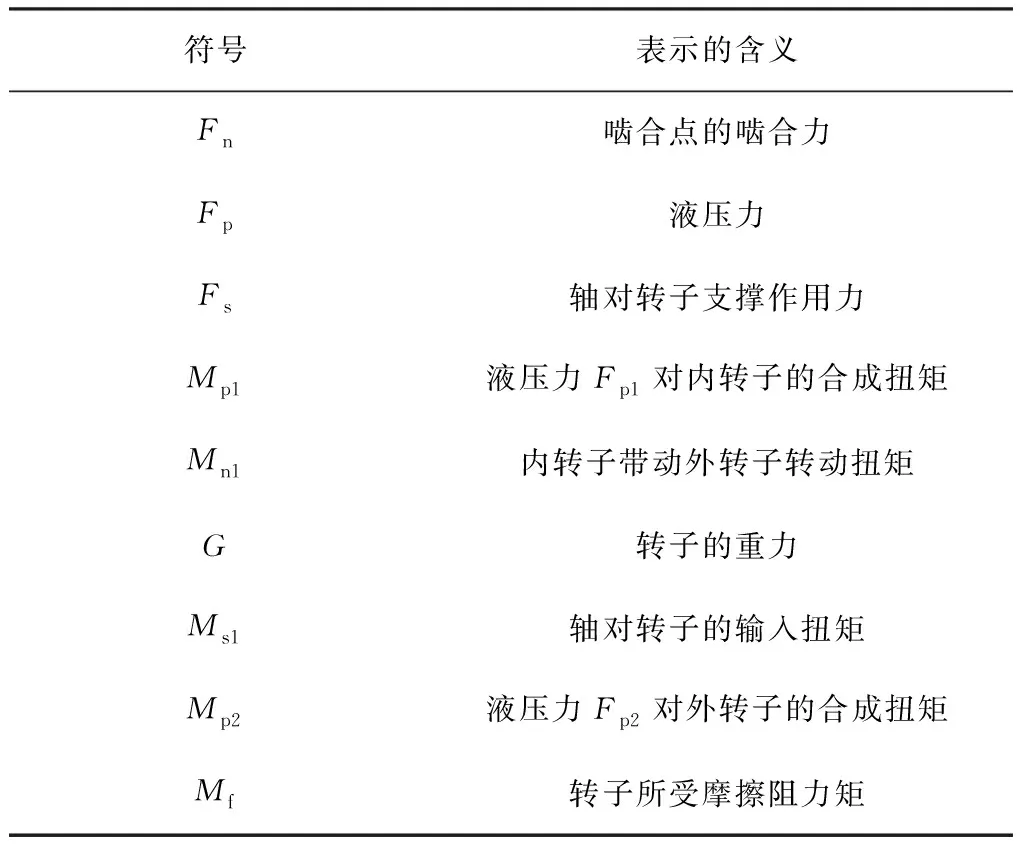
表1 内外转子受力分析图的符号含义
2 内外转子接触仿真计算
摆线泵转子工作时内外转子齿面通过接触传递运动,接触位置随着旋转发生变化,接触位置处会产生接触应力,接触应力的大小与传递载荷大小、接触面形状等有关。图3为内外转子接触示意。
摆线泵内外转子的接触点,可视为以啮合点处尺廓曲率半径ρ1、ρ2所形成的两个圆柱体的瞬时接触,如图3所示,其接触应力可根据赫兹接触应力公式来计算[4]。
(3)
采用Recurdyn的刚柔耦合动力学可分析该动态过程,并计算转子运转过程中的应力。将外转子设为刚性体,内转子划分为有限元柔性体,建立相应约束和负载。
2.1 接触面的定义
摆线泵转子间的运动是通过接触传递的,仿真计算最主要的也是接触面的定义及设置。文中零件转轴和内转子、内转子和销钉、内转子和外转子、外转子和端盖的接触形式为:Fsurface to Surface。
定义好接触面后,需合理设置相应接触参数,否则易发生计算结果不收敛或体和体间发生穿透。
2.2 接触参数的确定
接触计算是一个不断检测的过程,现有的接触算法都是基于赫兹接触理论,其接触力计算式为[5]
(4)
式中
(5)
C=μδn
(6)
其中:n为与材料有关的指数;μ为摩擦系数;δ为穿透深度。
Recurdyn的接触力计算模型如图4所示,计算公式为:
(7)

接触刚度参数太小容易穿透,太大则不易收敛。假设Ri=Rj,取K=1×105N/mm,阻尼取刚度的0.05~0.1%,内外转子的接触阻尼系数C确定为50 N·s·mm-1[6]。考虑接触摩擦作用,定义静摩擦系数为0.08,动摩擦系数为0.05,最大静摩擦对应的相对滑移速度为0.1 mm/s,动摩擦对应的相对滑移速度为1 mm/s。最大穿透深度δ取0.1 mm,非线性指数m1、m2、m3分别取1.5、1、2[7-8]。
2.3 齿面接触疲劳校核准则的确定
摆线泵内外转子在交变接触作用下,齿面容易发生接触疲劳失效。该摆线泵工作寿命要求为2万小时以上,转轴转速n为6 000 rpm。内外转子及销钉接触面工作寿命内的循环次数为7.2×109,齿面接触疲劳属于高周疲劳。
参考内啮合直齿圆柱齿轮齿面疲劳强度计算方法,采用接触疲劳对此进行接触强度校核,其许用接触应力可表示为:
(8)
式中:σHlim为齿轮材料的接触疲劳极限;ZN为寿命系数;SH齿面接触疲劳强度安全系数。
3 仿真结果及分析
通过对转子摆线泵接触设置及仿真,获得了摆线泵内转子动态的应力变化云图,从该云图可以直观的观察到转子在运转中最大应力的分布。实际设计中发现外转子齿形的倒角对接触应力影响较大,这是因为转子齿形倒角影响内外转子在啮合时的接触位置,较小的齿形倒角可使内外转子间存在较大的运动空间从而使接触应力降低,但过大间隙使油液流动不充分造成困油现象加剧;较大的齿形倒角能够降低困油现象但会使接触应力升高容易造成齿面失效。
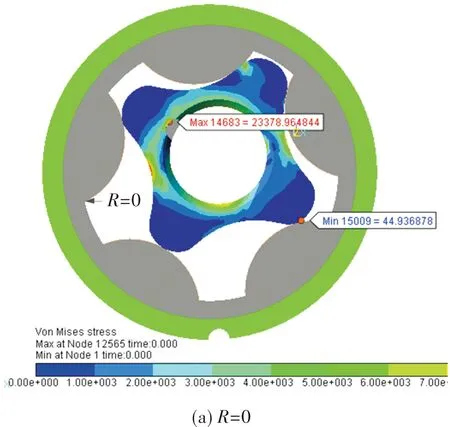
为了确定合适的转子倒角,分别设置了四种不同外转子齿形倒角并做了仿真对比,不同外转子齿形倒角下内转子最大应力分布如图5所示。不同倒角下最大应力节点应力历程曲线如图6所示。

该摆线泵内外转子材料为H11钢(材料规范AMS6487),其抗拉强度高于1380 MPa(200 ksi),取疲劳极限为690 MPa(100 ksi)。当齿轮要求有限寿命时,其许用应力系数可提高,考虑循环基数为1010,取该条件下寿命系数ZN的最小值(0.85[9])。基于前述数据,由式(8)可得到不同倒角条件下接触疲劳的安全系数SH,并以此计算校核各转子的接触疲劳安全系数。计算所得结果示于表2。
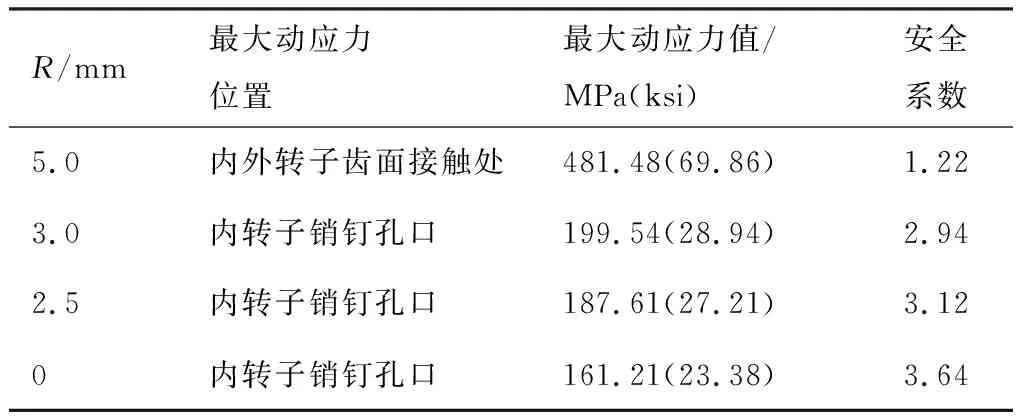
表2 不同倒角下内转子最大接触应力值及校核
通过仿真结果对比发现,随着外转子齿形倒角半径的增大,转子上产生的应力随之增大。齿形倒角半径较小时,最大应力位置在内转子销钉孔口处。当外转子齿形倒角为5 mm时,内外转子接触面上的应力明显增大,最大应力位置在内转子和外转子接触处。虽然无倒角时内外转子的接触应力最小,但是由于存在机加工问题及工作时出现困油现象,不宜采用无倒角转子。综合以上分析,认为取倒角为2.5 mm时比较合理。
4 结论
利用多体动力学RecurDyn软件,采用MFBD刚柔耦合动力分析技术对摆线泵内外转子的啮合过程进行了仿真计算。通过计算所得内转子动态等效应力分布云图及最大应力节点处的应力历程曲线可知各内转子最大的节点应力分布情况及应力大小。为了避免转子机加工问题及泵工作时出现困油现象,需对转子加工倒角。为确定转子倒角的合适尺寸,对无倒角和三种不同倒角半径的仿真计算,用S-N测试样本疲劳极限评估对转子齿轮进行了齿面接触疲劳校核,并在此基础上确定合理的倒角尺寸。该方法已在实际工程中得到有效验证,可为齿形优化设计提供了参考依据。
猜你喜欢
西北工业大学学报(2022年3期)2022-07-21
矿山机械(2022年6期)2022-06-18
汽车实用技术(2021年23期)2022-01-05
西安科技大学学报(2021年3期)2021-06-17
防爆电机(2021年1期)2021-03-29
西安交通大学学报(2021年1期)2021-02-01
西安交通大学学报(2021年1期)2021-02-01
看世界·学术下半月(2020年6期)2020-09-10
风能(2016年9期)2016-12-21
汽车零部件(2014年2期)2014-03-11
