摆线轮的建模与仿真
2022-01-05 11:21曹娟
汽车实用技术 2021年23期
曹娟
摆线轮的建模与仿真
曹娟
(太原城市职业技术学院 机电工程系,山西 太原 030027)
以平面啮合的基本原理为基础,介绍摆线轮齿面方程的数字化建模方法。结合摆线轮副的啮合方程式,利用三维设计软件SolidWorks中相应的功能,对摆线轮进行参数化建模、装配,检验动态啮合过程中的干涉。对干涉区域分析,得到理想的摆线轮三维模型。并且利用SolidWorks Motion运动仿真工具,得到摆线轮副的啮合运动,实现摆线轮传动的精确建模。
摆线轮;短幅系数;齿廓方程式;三维模型
引言
摆线轮传动特点是传动时摆线轮中凹的内摆线与摆线针轮凸的外摆线啮合,因而接触应力小,磨损均匀,内摆线与外摆线啮合的重合度较大,有利于弯曲强度的改善,无根切现象,结构紧凑,可得到较大的传动比。但其对相啮合的摆线轮与摆线针轮的中心距要求较高,若不能保证摆线轮与摆线针轮轮齿的正确啮合,就会影响定传动比传动,这种传动的啮合线是圆弧的一部分,啮合角是变化的,故轮齿承受的是交变作用力,影响传动平稳性,摆线针轮的制造精度要求较高。摆线轮传动在工业机器人、机床、医疗检测设备、卫星检测设备、卫星接收系统等方面用途广泛。摆线轮的齿形较为复杂,通过齿面形状求出数据点进行建模,过程较为繁琐且精确度不高。本文利用三维设计软件SolidWorks对摆线轮副进行参数化建模、虚拟仿真。
1 摆线轮传动啮合原理
1.1 摆线轮齿廓曲线形成原理
摆线轮的齿廓曲线较为复杂,在介绍摆线轮齿形绘制之前,需对摆线轮齿廓曲线形成原理及主要术语进行说明。
摆线轮传动是摆线轮和摆线针轮轴线相平行的一种平面齿轮啮合传动,其齿廓曲线通常采用外切外滚法或内切外滚法得到[1]。外切外滚法是指基圆Oa固定,滚圆Ob沿基圆Oa外侧做内切纯滚动时,则滚圆上任意一点T的运动轨迹,则称为外摆线,如图1所示。
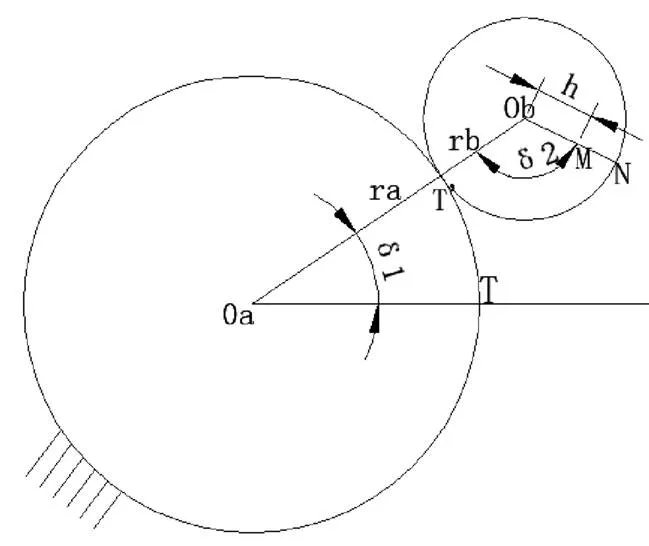
图1 齿廓曲线形成
此时,基圆半径a,滚圆半径b。滚圆Ob绕基圆Oa及自身中心的转角分别为1、2,得到轨迹弧长'和弧长'相等,即1r=2r。此时,令为齿的个数,为正整数,摆线针轮齿数比摆线轮齿数多1,因此r=(−1),1=(−1)2[2]。滚圆的半径即是短幅摆线的偏心距=。M是圆Ob上一点,距圆心Ob的距离为=1b,则1为短幅系数[2]。而M的轨迹就是理论外摆线,即为:

摆线轮实际短幅外摆线齿轮轮廓是理论外摆线轮廓的等距曲线,等距距离是摆线针轮针齿的半径。
1.2 摆线轮齿廓曲线标准齿形方程式
摆线轮传动中,实际短幅外摆线齿轮廓一般是理论外摆线轮的等距曲线,等距距离是针齿半径。则实际短幅外摆线的齿廓方程可以表示为:

2 摆线轮基本参数
表1 摆线轮副的参数
名称代号数值 摆线针齿个数Z218 短幅系数k0.775 86 摆线轮齿顶圆半径ra27.75 摆线轮齿根圆半径rf25.25 压力角α20o 摆线针轮齿根圆半径D2f58.7 摆线针轮齿顶圆半径D2A48 摆线轮齿数Z117
通过摆线轮齿廓曲线方程式,根据计算得到摆线轮、摆线轮齿宽、齿数等基本参数,如表1所示。
3 摆线轮参数化建模过程
3.1 参数化建立摆线轮模板
(1)利用Solidworks中方程式驱动曲线绘制摆线轮的齿形。选择Solidworks“工具”按钮中的“草图绘制实体”,再选择方程式驱动曲线,输入方程式:
= (50.417+4.583)*cos(2pi*t)+3.000 * cos((50.417+4.583) *2* pi * t / 4.583)
=(50.417+4.583)*sin(2*pi*t)+3.000*sin((50.417+4.583) *2* pi * t / 4.583)
得到摆线轮的二维齿廓图,如图2所示。

图2 摆线轮理论齿廓曲线
(2)将摆线轮理论齿廓曲线进行等距,得到摆线轮实际齿廓曲线,然后利用“拉伸”命令按钮,即得到摆线轮所需要的几何模型,如图3所示。
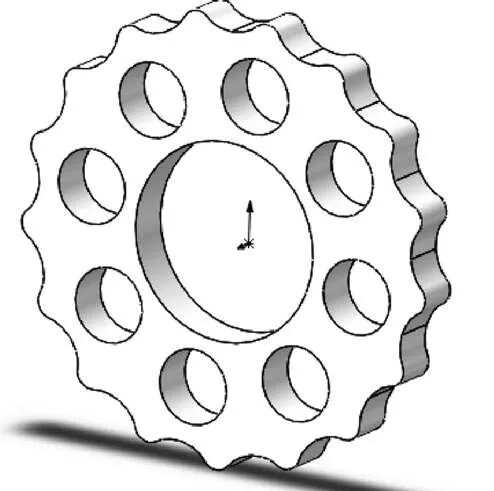
图3 摆线针轮建模
(3)由于摆线针轮与摆线轮的齿廓曲线是共轭曲线,得到摆线针轮的轮廓,如图4所示。

图4 摆线针轮建模
3.2 摆线针轮装配
Solidworks装配体方法包括“自上而下”和“自下而上”两种装配设计法[3]。本次装配选择的是自下而上装配法,其特点是零部件独立设计。
(1)首先新建装配体文件,然后将摆线轮导入到该装配体中,并且将其几何中心与装配体的几何中心重合,默认该零件固定。然后再添加摆线针轮,而此时摆线针轮是浮动状态,约束为0,可以任意浮动。
(2)用配合来确定零部件将摆线轮插入到装配体,在一个装配体中插入零部件之后,需要考虑该零部件和其他零部件之间的关系。添加配合关系后,可以在未受约束的自由度内拖动零部件。在选择需要的点、线、面或参考几何体时,经常需要改变零部件的位置显示,此时一般与旋转或移动零部件按钮配合使用。导入摆线轮之后,选择“轴线平行、平面相切、齿轮配合”等约束命令按钮进行装配,如图5所示。
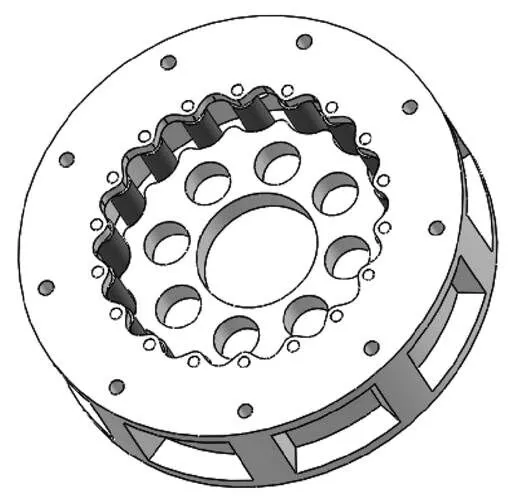
图5 摆线针轮传动装配
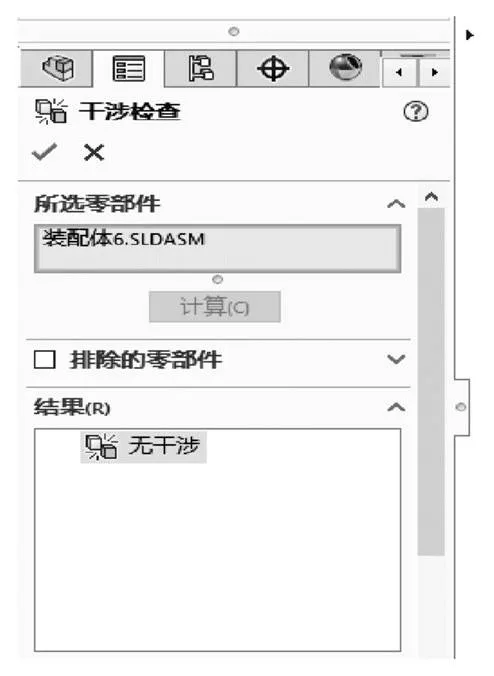
图6 干涉检查
(3)因在复杂的装配体中,用视觉检查零部件之间是否存在干涉的情况是件困难的事情。所以可以通过更改干涉和不干涉零部件的显示设置便于查看是否干涉,并可以将重合干涉和标准干涉进行区分。这时,我们将装配好的摆线轮单击“装配体”工具栏中的“干涉检查”命令,系统弹出“干涉检查”属性管理器,在“所选零部件”选项组中,系统默认选择整个摆线针轮传动为检查对象,在“选项”选项组中,勾选“使干涉零部件透明”复选框,完成上述操作后,单击“所选零部件”选项中“计算”按钮,此时在“结果”中显示检查结果,得到摆动齿轮副干涉为0,如图6所示。
3.3 运动学仿真
Solidworks Motion是运动仿真工具,是将装配体模型运动的图形模拟,并可将诸如光源和相机透视图之类的视觉融合到运动算例中。在“运动算例”添加马达,转速为10 r/min驱动摆线针轮传动中的一个零部件运动,分别设置摆线轮和摆线针轮的旋转方向和角速度。根据选择的“计算模拟”,得到摆线针轮副的啮合运动,同时Solidworks Motion中弹出“动画控制器”,根据所需要的速度进行控制动画进度,最后将摆线针轮传动动画以Avi格式保存,如图7所示。

图7 摆线针轮动画
4 结论
本文以摆线针轮平面啮合原理为基础,从摆线轮与摆线针轮几何参数计算和理论分析进行深入研究。通过三维设计软件SolidWorks2018对摆线轮与摆线针轮采用参数化建模,并将摆线轮与摆线针轮装配达到零干涉装配,以及利用Solidworks Motion运动仿真,为实际生产设计摆线轮与摆线针轮减少了理论设计时间,提高生产效率,对以后的摆线针轮传动的设计和优化有一定的实际指导意义。
[1] 李力行,何卫东,侯东海,等.齿轮手册(上册)第8篇:摆线针轮传动[M].北京:机械工业出版社,2000:8-7.
[2] 宋原.纯滚动类摆线针轮传动啮合原理研究[D].北京:北京邮电大学,2014:15-19.
[3] 赵罘,杨晓晋,赵楠.Solidworks2020中文机械设计从入门到精通[M].北京:人民邮电出版社,2020.7:739-783.
Modeling and Simulation of Cycloidal Gear
CAO Juan
( Taiyuan City Vocational College, Mechanical and Electrical Engineering Department, Shanxi Taiyuan 030027)
Based on the principle of plane meshing,the equation derivation process of the tooth line of cycloid pin gear tooth is introduced.Integrating the meshing equation of cycloidal gear pair,and using the function of the three-dimensional software,parametric models of a pair of cycloid pin gear is built,the assembly and interfere check in the process of the dynamic mesh are carried out.Through the analysis of interefernce zone,the ideal three-dimensional model of cycloid is got.Using the SolidWorks Motion simulation tool,the meshing motion of cycloidal gear pair is achieved,and the precise cycloidal gear pair is realized.
Cycloidal gear;Curtate cycloid;Profile equation;Three-dimensional model
U467
A
1671-7988(2021)23-111-03
U467
A
1671-7988(2021)23-111-03
10.16638/j.cnki.1671-7988.2021.023.031
曹娟(1982—),女,硕士,讲师,就职于太原城市职业技术学院机电工程系,主要从事机械传动、汽车自动变速器研究等。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26
智能制造(2021年4期)2021-11-04
语数外学习·高中版中旬(2020年3期)2020-09-10
中国建筑金属结构(2018年12期)2018-12-22
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
理科考试研究·高中(2017年7期)2017-11-04
扬子江(2017年4期)2017-07-19
数学大世界·初中生辅导版(2010年2期)2010-03-08