光学导航系统辅助CT导向在经皮穿刺活检术中的应用研究
2022-09-01 06:12孙木水杨荣骞陈锦福李春田竹晓雷
影像研究与医学应用 2022年14期
孙木水,杨荣骞,陈锦福,李春田,竹晓雷,马 杰
(佛山市南海区大沥医院影像科 广东 佛山 528231)
CT引导下肺穿刺活检术是确诊肺癌及肺结节病理组织类型的重要手段,已广泛应用于临床实践,但其无法对肺穿刺路径无法进行实时监测,活检进针精准性差,且易导致肺活检的临床并发症[1]。利用光学定位技术实时跟踪肺穿刺的针位姿势,能够提供精准、客观、实时交互的肺穿刺活检引导。动物实验证明,光学导航与CT影像融合肺穿刺整体方案能够提供实时监测肺穿刺活检精准路径,达到快速辅助临床肺穿刺活检的研究目标。基于此,本研究旨在探究在经皮穿刺活检术中应用光学导航系统辅助CT导向的临床价值,现报道如下。
1 资料与方法
1.1 一般资料
选取佛山市南海区大沥医院经皮穿刺活检术患者66例,采用数字随机表法随机分为对照组与观察组各33例。纳入标准:①单发病灶;②超声检查、痰脱落细胞学检查、纤维支气管镜检查、胸水检查等不能确定性质的病灶;③依从性较好。排除标准:①合并慢性支气管炎、慢性阻塞性肺疾病、肺大疱等疾病;②合并凝血功能障碍;③精神疾病患者。对照组中男性20例,女性13例;年龄37~72岁,平均年龄(50.16±5.20)岁;病灶直径最大12.50 cm,最小0.70 cm,平均(3.67±0.72)cm。研究组中男性21例,女性12例;年龄36~73岁,平均年龄(50.22±5.31)岁;病灶直径最大12.44 cm,最小0.69 cm,平均(3.65±0.70)cm。两组患者的一般资料比较,差异无统计学意义(P>0.05),具有可比性。本研究符合《赫尔辛基宣言》要求。
1.2 方法
对照组实施CT导向下穿刺:①选用德国西门子的64排螺旋CT机,以CT图像为依据对穿刺部位进行确定,在病灶对应胸壁位置定标贴片。②使患者选择平卧位,再予以CT扫描,对最佳穿刺路径进行确定,并对进针深度、角度进行确定。③常规消毒并铺巾,之后通过2%利多卡因予以局麻处理,按照确定位置缓慢进针,再通过CT扫描,对穿刺针到达病灶位置进行确定。④进行活检取样,并进行组织固定,之后送检。研究组实施光学导航系统辅助CT导向下穿刺:①选用美国Marconi公司的Ipath 200光学追踪引导系统,德国西门子的64排螺旋CT机,美国巴德公司的巴德分体式切割活检枪,美国MD Electronics公司的18G同轴切割活检针(15 cm长)。②定位像扫描。按照CT图像对穿刺位置进行确定,在病灶对应胸壁位置定标贴片,使患者选择平卧位,并指导其匀速、平均呼吸,之后再实施CT扫描。③对位融合。先将CT图像导出,再将其向图像处理系统传入,系统对CT图像标记点进行识别,确定中心区域,之后与光学导向系统铺货的标记点中心区域影响进行对位融合,进而对体表、内靶点三维空间位置进行确定,完成对位融合之后,将系统切换呈实时融合导航模式,进而对最佳进针路径进行确定。④进针取样。首先进行常规铺巾并消毒处理,采用2%利多卡因进行局麻,在进针之前再次对位置进行校对,对进针点进行确定,并确定进针角度,将10 mL注射器与活检针相连接,注意注射器管壁有3个标记点,利用光学跟踪导航系统,对注射器上标记点进行跟踪,以便于实时监控针尖、针体所处部位,可反映出病灶靶点、针尖之间空间位置变化,再与呼吸运动产生的位移相结合,缓慢进针,对穿刺深度、角度进行调整,使针尖达到病灶合适位置,再通过活检枪柄对病变组织进行切取,固定之后送检,对穿刺并发症进行观察与处理。
1.3 观察指标
①比较两组穿刺效果:包括定位时间、穿刺时间、调针次数、总手术时间。②比较两组辐射情况:包括扫描次数、辐射剂量。③比较两组并发症情况:涉及到肺内局部出血、气胸以及咳血等。
1.4 统计学方法
使用SPSS 22.0统计软件进行数据处理。符合正态分布的计量资料采用(± s)表示,行t检验;计数资料用频数(n)和百分率(%)表示,组间比较采用χ2检验。P<0.05为差异有统计学意义。
2 结果
2.1 两组穿刺效果对比
研究组定位时间、穿刺时间、调针次数、总手术时间均短于对照组,差异均有统计学意义(P<0.05),见表1。
表1 两组经皮穿刺活检术患者穿刺效果对比( ± s)
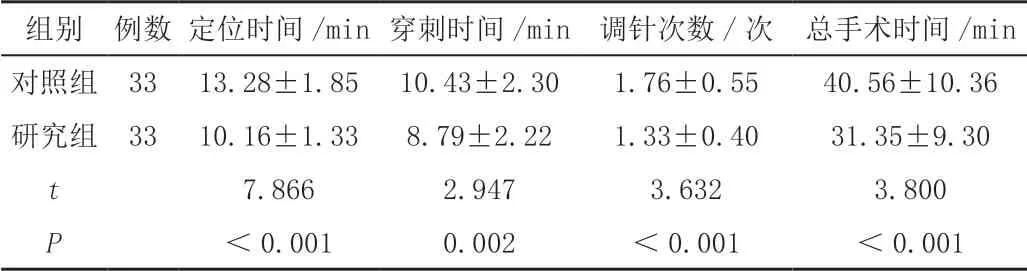
表1 两组经皮穿刺活检术患者穿刺效果对比( ± s)
2.2 两组辐射情况对比
研究组扫描次数、辐射剂量均小于对照组,差异有统计学意义(P<0.05),见表2。
表2 两组经皮穿刺活检术患者辐射情况对比( ± s)
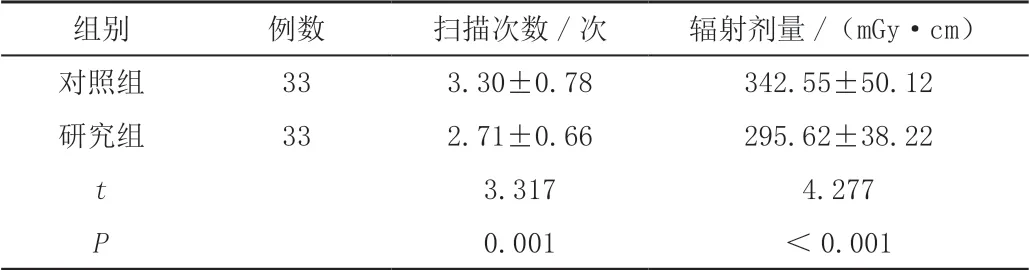
表2 两组经皮穿刺活检术患者辐射情况对比( ± s)
2.3 两组并发症情况对比
研究组并发症总发生率(18.18%)低于对照组(39.39%),差异无统计学意义(P>0.05),见表3。
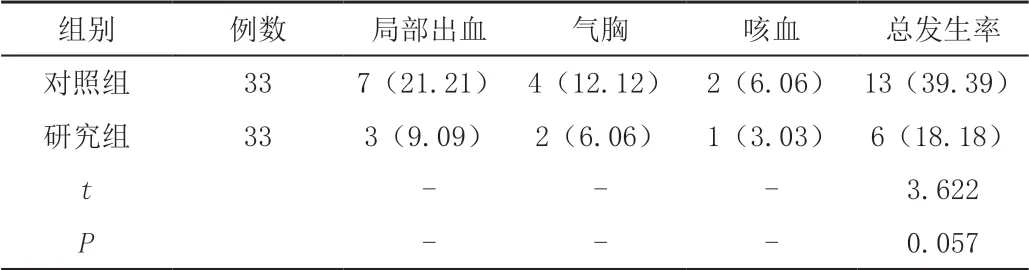
表3 两组经皮穿刺活检术患者并发症情况对比[n(%)]
3 讨论
CT引导下经皮穿刺活检术是肺部小结节病变与周围型病变的主要诊断方式,也是确诊肺肿瘤病变的病理组织类型的重要方法之一,适合在纤维支气管镜无法观察的病变区域定性诊断中应用,是临床诊疗和预后判断的重要依据[2]。临床CT肺穿刺活检的质量主要依赖CT引导及操作者熟练水平,需多次CT定位及反复训练肺穿刺才能达到准确取材的目的。然而反复肺穿刺易导致气胸、肺内出血等并发症。肺穿刺活检术导航系统既能降低肺活检的风险,又提高医疗安全与诊疗效果,具有临床价值及良好社会和经济效益。相关研究指出,CT引导下经皮穿刺活检术不仅定位准确,且创伤轻,确诊率较高,不会产生严重并发症[3]。但在实际应用过程中,因穿刺期间需要多次进行扫描观察,会产生一定的辐射危害。随着影像学技术发展,影像导航辅助定位穿刺系统在临床诊断中不断应用与普及,其不仅具备影像技术特点,同时具备导航定位优势,还可以强化微创介入治疗过程中的实时监控作用,提高手术器械操作的精准度[4]。然而,国内外手术导航系统主要应用于头部、神经外科、骨科等领域,基于胸腹腔手术导航技术,尚处于初始研究阶段,均为磁导航,无法提供准确的深度以及实时监测肺穿刺路径信息,对针尖进入肺组织后导致的偏倚误差也无法提供反馈,不能解决由于患者呼吸运动导致的穿刺误差[5]。
光学手术导航是广泛应用的手术导航技术之一,具有实时性好、精度高、不受电磁设备干扰等优势。目前,光学定位主要见于肝癌消融导航[6]。使用手术导航系统辅助手术之前,需要对图像空间和实际空间进行注册,即手术注册。此过程需要医生按顺序,手动提取实际空间和图像空间中所有标记点坐标,是手术导航中操作流程最复杂、耗时最多、对系统误差有重要影响的步骤。同时由于呼吸运动,使得穿刺针尖偏离靶点距离太大,往往不能达到可接受的误差范围。所以,如何在肺穿刺过程中快速跟踪器官的移位与形变,寻找最佳穿刺时隙,是精准肺穿刺必须解决的关键问题[7]。基于光学定位系统,联合人工智能分析,及高水平的临床经验,共同研发实时精准的肺穿刺导航系统,规划准确与安全穿刺路径,实时计算由患者呼吸带来的位置误差,预测肺活检的穿刺风险,降低其带来的并发症为研究目标,具有重大的临床意义。光学定位系统利用摄像头对标记点目标进行观察,而这些标记点目标可以反射光线或主动发光,以便于获得相关信息,再向定位系统进行传输,结合双目立体视觉原理进行精确定位,对目标区上标记点进行追踪,为操作者提供精确空间位置,方便对手术器械进行动态跟踪,并引导其准确、精确到达目标区域[8]。之后操作者利用光学导航系统对其予以实时监控,结合空间定位,准确掌握手术部位、手术器械之间的空间对位关系,确定其解剖结构,以患者呼吸运动为依据对进针深度、角度进行调整,以便于对病灶予以精准操作,此种方式不仅能够保证高度的精确性,而且可以避免电磁干扰,可以在各部位活检引导中应用[10]。
然而,当前鲜有光学导航系统辅助CT导向在经皮穿刺活检术中的应用研究报道。基于此,本研究通过光学导航系统辅助CT导向实施经皮穿刺活检术,并与常规CT导向作对比,对其穿刺效果、辐射情况及并发症发生情况进行分析[9]。本研究结果显示,研究组定位时间、穿刺时间、调针次数、总手术时间均短于对照组,差异均有统计学意义(P<0.05)。研究组扫描次数、辐射剂量均小于对照组,差异有统计学意义(P<0.05)。研究组并发症总发生率(18.18%)低于对照组(39.39%),差异无统计学意义(P>0.05)。提示光学导航系统可以利用图像融合的方式,使穿刺活检方案得到优化,为操作者提供准确穿刺点,确定穿刺深度、角度,以便于在最短时间内进行最为精准的定位与取样操作;光学导航系统的应用可以减少辐射危害,提供保护效应,同时可以提高穿刺成功率,避免穿刺损伤,安全性较好。
综上所述,在经皮穿刺活检术中,相较于CT导向下穿刺,光学导航系统辅助CT导向的应用的定位更加准确,穿刺也更加准确,且安全性较好,辐射剂量减少,值得临床推广应用。
猜你喜欢
心理科学进展(2022年10期)2022-11-26
实用手外科杂志(2022年2期)2022-08-31
导航定位学报(2022年4期)2022-08-16
舰船科学技术(2022年11期)2022-07-15
锦州医科大学报(2022年2期)2022-05-07
医学概论(2022年3期)2022-04-24
现代临床医学(2022年2期)2022-04-19
华声文萃(2019年8期)2019-09-10
文萃报·周五版(2019年25期)2019-09-10
中国针灸(2000年6期)2000-06-13