六足机器人特技动作运动分析
2022-07-03 14:33:58吴文锦庄涵颖陈明明张平霞朱永强
江苏工程职业技术学院学报 2022年2期
吴文锦,庄涵颖,陈明明,张平霞,朱永强
(青岛理工大学机械与汽车工程学院,青岛 266520)
0 引言
随着科技的快速发展,机器人形状多种多样,如双足、四足、六足和八足机器人。和多足动物一样,多足机器人具有对不平整地形的高度适应性和良好的稳定性,能在不平整路面上保持平衡的前提下完成作业。[1]陈杰[2-3]基于崎岖地形分别对六足机器人腿部、躯干和各支撑腿的并联结构进行运动学分析;丛恩博[4]基于崎岖路面上的自由步态进行了六足机器人行走控制方法的研究;柳天虹等人[5]以一种新型仿甲虫六足机器人为研究对象,给出了机器人髋关节电机角度与步长的关系式,证明了六足机器人在水平地面和斜坡上具有良好的稳定性;张春阳等人[6]基于步长条件分析了六足机器人在三角步态下的静态稳定性;李晓理等人[7]对一种偏心轮构造的六足机器人在波浪式爬坡状态下进行爬坡稳定性分析;杨忠炯等人[8]对双摆臂履带式移动机器人在斜坡上的自主越障性能进行了分析。这些研究中的机器人具有多种不同的功能,能够满足一定的作业要求,但在不平整路面上缺乏保持身体平衡的功能。
本文仿照蜘蛛的身体结构,利用SolidWorks 软件对六足机器人进行结构设计,并对六足机器人避开不同位置的障碍物时机身如何保持平衡进行运动学分析。根据腿部结构推导出腿部关节角度的运动学模型。依据升降和倾斜的运动原理分析腿部关节运动对六足机器人平衡性能的影响。
1 机械结构
六足机器人结构由18 个舵机驱动并连接,每条腿有3 个自由度,连接3 个舵机。机身纵向最大长度为175 mm,横向最大宽度为155 mm,机身结构为六边形,由上、下面板组成。机身和股节之间由2 个舵机连接,2 个舵机组成十字万向节结构,十字万向节有2 个自由度,可以实现腿部结构在一定范围内的水平运动和垂直运动。股节与胫节之间用1 个舵机连接,在运动时能够进行一定范围内的角度变化,使六足机器人能进行升降和倾斜运动。图1 为利用SolidWorks 软件对六足机器人结构进行的三维模型设计。六足机器人技术参数如表1 所示。按照六足机器人上升运动、下降运动和倾斜运动时机身姿态须达到的设计要求设定各个部件的长度。其中,基节用于步态行走,长度最短。股节连接基节和胫节,支撑机身结构能够达到一定的高度。胫节与地面接触,连接股节和地面,使得机器人能够在不平整路面行走时保持良好的平衡性。

图1 六足机器人三维模型

表1 六足机器人技术参数
2 六足机器人特技动作分析
六足机器人在不平整路面需要根据路面障碍物的位置(包括位于机器人的正上方、正下方、左下方、右下方4 种情况)实时调整腿部关节角度,以保持机身平衡。为方便研究,绘制六足机器人正视方向的简图,并标注 4 种障碍物位置下六足机器人不同关节点的位置,如图 2 所示。其中,点 A(A1、A2、A3、A4)、B(B1、B2、B3、B4)为股关节,点 C(C1、C2、C3、C4)、D(D1、D2、D3、D4)为胫关节,点 E(E1、E2、E3、E4)、F(F1、F2、F3、F4)为足端位置。因本研究仅进行平衡分析,未考虑行走过程,故未对基关节进行分析。

图2 六足机器人在4 种障碍物位置下的运动姿态
对六足机器人避开不同位置路面障碍物时的运动情况分析如下:
1) 机身正下方有障碍物。当障碍物在六足机器人正前方且高度小于初始姿态机身距离地面的高度时,需要抬高机身来避开障碍物。股关节、胫关节处舵机做逆时针旋转运动,而右侧腿部关节相反,做顺时针运动,机身由A、B 处向上移动到A1、B1处,机身抬高,六足机器人可顺利跨越障碍物,并保持机身平衡。
2)机身正上方有障碍物。当障碍物在六足机器人正前方且高度大于初始姿态机身距离地面的高度时,需要降低机身来避开障碍物。左侧腿的股关节、胫关节处舵机做顺时针旋转运动,而右侧腿部关节相反,做逆时针运动,机身由A、B 处向下移动到A2、B2处,降低机身,六足机器人可避开障碍物,并保持机身平衡。
3) 机身左下方有障碍物。当障碍物位于六足机器人左下方时,机器人需要调节股关节、胫关节处舵机旋转角度来使得机身始终保持平衡。左侧腿的股关节、胫关节处舵机做顺时针旋转运动,右侧腿部关节舵机运动与之相同,机身由A、B 处向下移动到A3、B3处,六足机器人机身可保持平衡。
4) 机身右下方有障碍物。当障碍物位于六足机器人右下方时,机器人需要调节股关节、胫关节处舵机旋转角度来使得机身始终保持平衡。左侧腿的股关节、胫关节处舵机做逆时针旋转运动,右侧腿部关节舵机运动与之相同,机身由A、B 处向下移动到A4、B4处,六足机器人机身可保持平衡。
5) 运动学分析。以六足机器人机身升降运动为例,以初始状态机身的中心点为坐标原点建立笛卡尔坐标系,图3 所示为六足机器人腿部结构正视图,虚线部分为六足机器人初始状态时位置,实线部分为运动后机身位置。在升降运动中,机身高度会受腿部结构运动而改变,通过调节股关节和胫关节角度来改变机身高度,可使得机身顺利避开障碍物。由于升降运动是机器人在站立状态下进行的,故不考虑基节的问题。以六足机器人右下方出现障碍物为例,绘制机身倾斜运动时腿部结构正视图,如图4 所示。六足机器人做倾斜运动需要根据两侧地面的高度差来调节股关节和胫关节角度,使机器人避开障碍物时机身能保持水平。其中,已知的参数有股节长度L1,胫节长度L2,机身宽度AB。未知的参数有股关节夹角α,胫关节夹角β,股关节与足端的水平长度L3,股关节与足端的直线长度L4,机身距离地面的实时高度为 H1,而 α1、α2为股关节夹角 α 互补角,且随 α 角度的变化而变化。根据余弦定理可推导出六足机器人的机身实时高度H1的计算式为:

图3 六足机器人升降运动腿部结构正视图


图4 六足机器人倾斜运动腿部结构正视图
足端到股关节水平距离L3和直线距离L4的计算式为:

经计算,L4与六足机器人垂直方向的角度α1、L4与六足机器人股节之间的夹角α2为:

根据腿部结构运动关系可得股关节夹角α 与胫关节夹角β 的计算式:

当六足机器人正下方有障碍物时,机身做上升运动,α、β 随机身高度H1的上升而变大;反之,当六足机器人正上方有障碍物时,机身做下降运动,α、β 随机身高度H1的降低而变小。当六足机器人左下方有障碍物时,左腿股关节和胫关节做顺时针运动,α、β 减小,右腿股关节和胫关节做顺时针运动,α、β 增大。当六足机器人右下方有障碍物时,左腿股关节和胫关节做逆时针运动,α、β 增大,右腿股关节和胫关节做逆时针运动,α、β 减小。
3 SolidWorks 仿真验证
在六足机器人足端处添加一块模拟地面,并利用SolidWork 进行建模。添加好约束条件后,利用SolidWork 进行仿真,各结构的运动参数仿真结果如表2 所示,腿部关节变化的仿真如图5 所示。
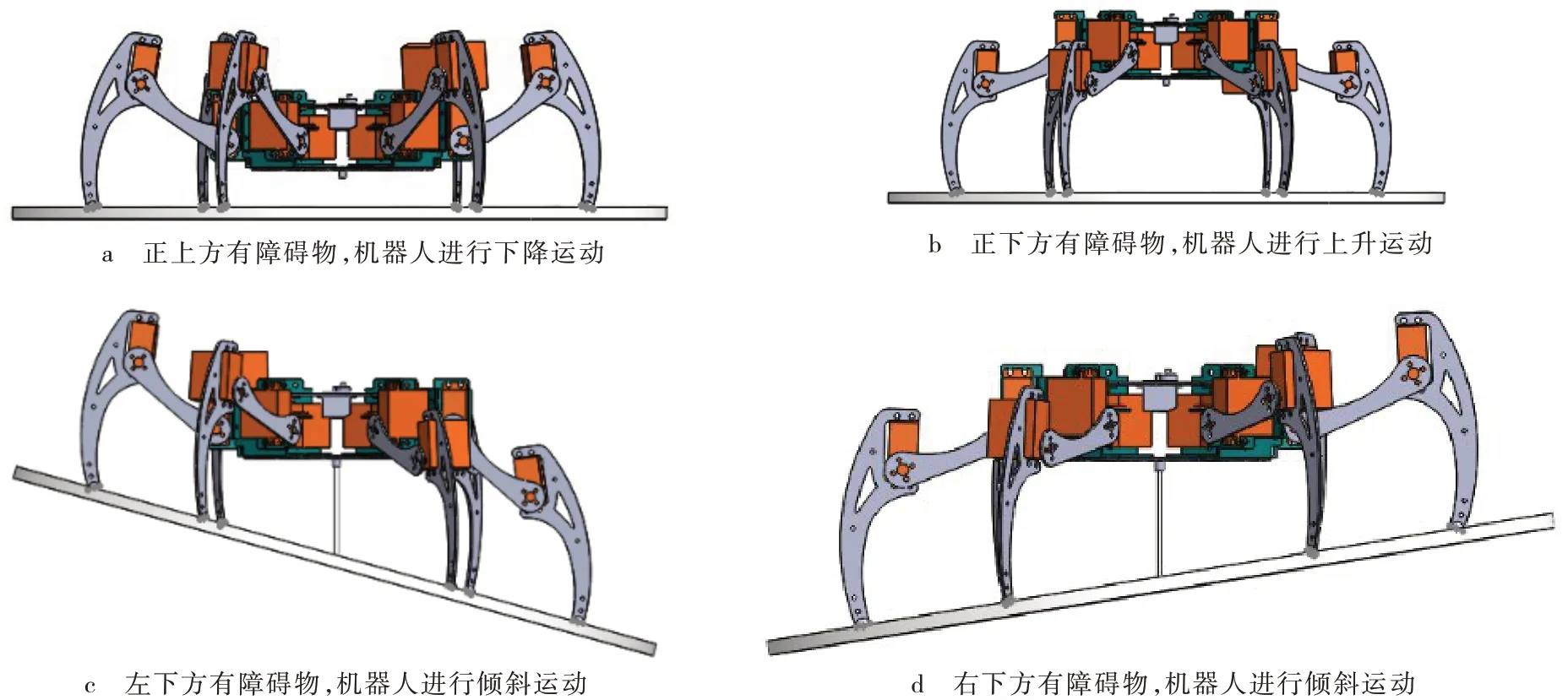
图5 机器人腿部关节变化的SolidWorks 仿真验证

表2 六足机器人结构运动参数
初始状态下,六足机器人的机身高度为127 mm,上升后机身高度为156 mm,机身上移了29 mm;向下移动后机身高度为67 mm,机身下移了60 mm,向下移动的幅度比向上移动幅度大。在倾斜运动中,基关节、股关节、胫关节角度的变化幅度均为90°。
4 总结
通过模拟路面障碍物在六足机器人正上方、正下方、左下方、右下方的4 种情况进行机器人升降、倾斜运动学分析,建立腿部结构股关节、基关节的运动模型,使机器人能够顺利规避障碍物。利用SolidWorks 模拟不平整地面,对六足机器人4 种特技动作进行仿真,得到结构运动参数,为六足机器人控制研究提供了参考。
猜你喜欢
河北体育学院学报(2023年6期)2023-11-16 09:12:54
玩具世界(2022年2期)2022-06-15 07:35:58
中医正骨(2021年3期)2021-04-17 18:25:25
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
中成药(2017年8期)2017-11-22 03:19:52
制造业自动化(2017年2期)2017-03-20 14:26:08
西南军医(2016年5期)2016-01-23 02:20:19
恋爱婚姻家庭(2015年27期)2015-12-19 00:54:49
恋爱婚姻家庭·养生版(2015年9期)2015-05-14 17:38:26