一种SVPWM 简化算法的设计与实现
2022-06-03 08:41马建辉周广旭朱孟美慕永云
电源学报 2022年3期
马建辉,高 佳,周广旭,朱孟美,慕永云
(1.齐鲁工业大学(山东省科学院);山东省科学院自动化研究所;2.山东省汽车电子重点实验室,济南 250014)
空间矢量脉宽调制SVPWM(space vector pulse width modulation)技术利用8 个基本电压矢量合成电压空间矢量,使其磁链轨迹尽量逼近圆形,可以达到减少功率开关器件的开关次数、提高直流电压利用率、获得较好的谐波抑制效果的目的[1]。与传统的正弦矢量调制SPWM 技术相比,其功率开关器件的开关次数可以减少1/3,直流电压利用率可提高15%,且易于实现实时的数字化控制。因此广泛应用在三相交流电机的磁场定向控制中[3-4]。
为了使合成磁链轨迹尽量逼近圆形,从而更好地抑制谐波和转矩脉动,需要为三相逆变器设置较高的PWM 开关频率,但是传统的SVPWM 算法需要执行反正切、求正弦、求余弦的三角运算,较长的运算时间限制了PWM 开关频率的提升空间,从而限制了抑制转矩脉动和谐波的效果。文献[5-8]利用合成电压空间矢量的α、β 轴分量的若干代数关系运算结果为中间变量,判断空间矢量所在扇区号,尽管在扇区号判断环节降低了对三角函数运算的需求,但中间变量无法用于PWM 模块占空比的计算,在嵌入式实现中仍需要经过复杂的计算,得出a、b、c 三相PWM 模块的占空比。文献[9]根据Us的α、β 轴分量、Us空间位置和扇区边界的关系设计了3 个中间变量,通过中间变量的正负号直接判断空间矢量所在扇区,但其几何关系的直观性不强。
本文提出一种SVPWM 简化算法[2],将(a,b,c)三相参考系逆时针旋转90°,形成新的(a',b',c')三相参考系,使得新三相参考系的3 个轴分别和SVPWM 的扇区边界垂直。将(α,β)正交坐标系下的合成电压空间矢量Us映射到(a',b',c')参考系,根据几何关系,通过a'、b'、c' 轴分量的正负号直接判断空间矢量所在扇区,并根据标幺化的a'、b'、c' 轴分量直接计算七段式SVPWM 方法下a、b、c 三相PWM 模块的占空比,最后在Simulink 下对SVPWM简化算法进行仿真验证。
1 SVPWM 基本原理
1.1 合成空间矢量
设Umg为三相交流电机中的相电压幅值,ω 为相电压频率,三相相电压幅值相同,频率相同,相位依次相差2π/3,则有
a、b、c 三相的空间分布依次相差2π/3,合成的电压空间矢量Us可以表示为可见,合成空间矢量Us是一个幅值为3Umg/2、幅角为ωt 的矢量,矢量的轨迹为圆形。
1.2 SVPWM
SVPWM 的基本原理是对图1 所示的三相桥式逆变电路中的6 个功率开关器件做有序地开关控制,使逆变器输出的三相电压的合成矢量模拟这个圆。
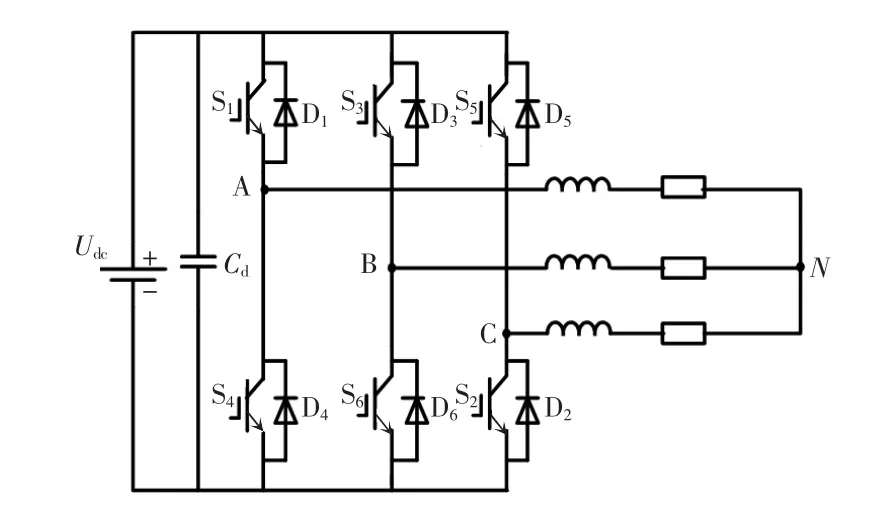
图1 三相桥式逆变器Fig.1 Three-phase bridge-type inverter
逆变器的输出电压取决于其6 个功率器件的开关状态,同一桥臂同时只能有一个处于导通状态,由此共可得8 种开关组合,产生8 个基本电压矢量。当3 个桥臂的开关同时开或同时关时,空间电压矢量的模值为0,称为零矢量,共有6 个非零矢量。这6 个非零基本电压矢量把复平面空间分为6 个扇区,如图2 所示。SVPWM 就是利用8 个基本电压矢量等效合成每个扇区中任意的合成电压空间矢量Us。
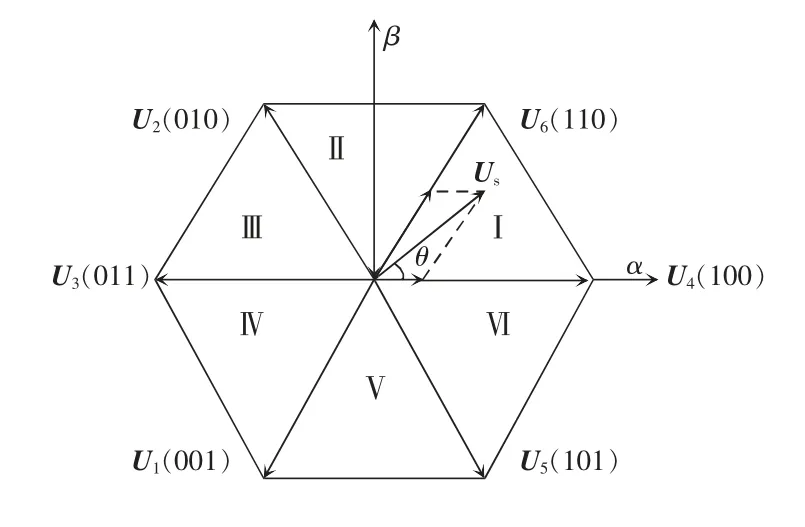
图2 基本电压矢量空间分布Fig.2 Spatial distribution of basic voltage vectors
1.3 SVPWM 算法的传统实现
SVPWM 算法的传统实现分为以下3 步:①根据α、β 轴分量判断合成电压空间矢量Us所在扇区;②计算在PWM 开关周期Ts下,扇区起始矢量、终止矢量和零矢量的维持时间Tx、Ty、Tz;③根据Tx、Ty、Tz分别计算并设置三相桥式逆变器a、b、c 相对应的PWM 模块的占空比。
判断Us所在扇区的一般方法为:将Us的α、β轴分量相除后求反正切,得到合成电压空间矢量Us和α 轴夹角θ,根据θ 判断Us所在扇区号。尽管很多MCU 厂商提供了包含求反正切函数在内的数学运算库,但其计算耗时长,影响电流环的响应速度,如果采用查表的方式计算,虽然可以在一定程度上节省计算时间,但会消耗宝贵的存储空间。而且,经过时间密集或空间密集的的三角函数运算后,其运算结果仅用于扇区判断,不能用于下一步的基本矢量维持时间和占空比的计算。
2 SVPWM 算法的简化实现
SVPWM 算法的简化实现分为2 步:
(1)建立和扇区边界垂直的新三相参考系,根据新参考系各轴分量的正负号判断合成电压空间矢量Us所在扇区;
(2)根据新参考系各轴的标幺化分量、Us所在扇区,计算并设置七段式SVPWM 方法下a、b、c 三相对应的PWM 模块的占空比。
2.1 扇区简化判断
将(a,b,c)三相参考系逆时针旋转90°,建立图3 所示的(a',b',c')三相参考系。其中,a'轴和(α,β)正交坐标系下的β 轴同轴同向,与SVPWM 第Ⅰ和Ⅳ扇区的起始矢量垂直;b' 轴与SVPWM 第Ⅲ和Ⅵ扇区的起始矢量垂直,c' 轴与SVPWM 第Ⅱ和Ⅴ扇区的起始矢量垂直。
如图3 所示,(a',b',c')三相参考系的a'、b'、c'轴分别和SVPWM 扇区的边界垂直,故a'轴分量、b'轴分量、c'轴分量U'c的正负号与扇区划分之间有明确的几何关系,可以根据、、的正负号判断Us所在扇区。各分量符号和扇区的对应关系如表1所示。
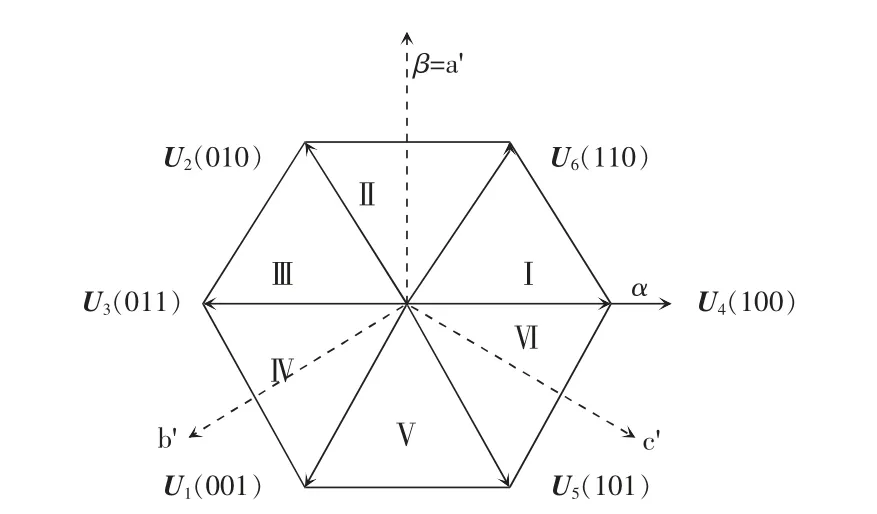
图3 (a',b',c',b',c')三相参考系Fig.3 (a',b',c')three-phase reference system
表1 扇区和、、正负号的对应关系Tab.1 Correspondence between sectors and signs of,,and
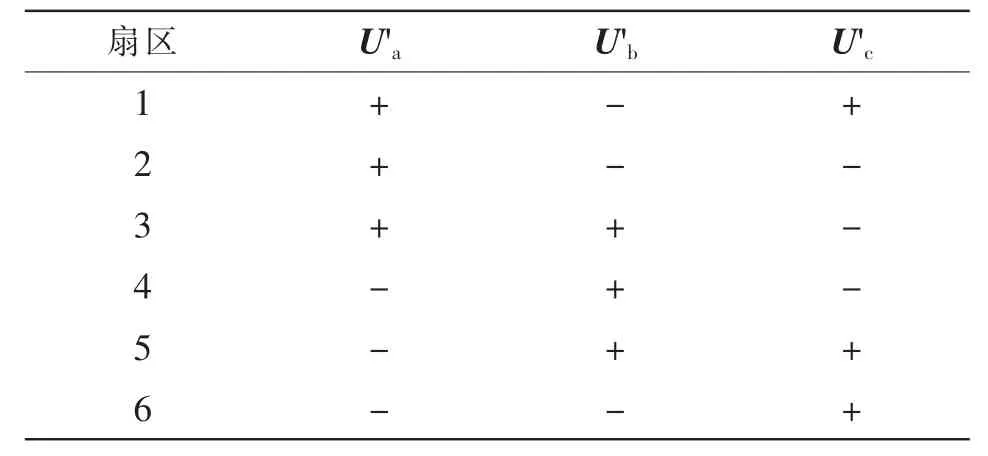
表1 扇区和、、正负号的对应关系Tab.1 Correspondence between sectors and signs of,,and

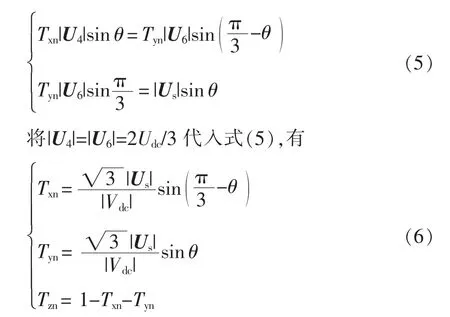
2.2 基本矢量维持时间计算
由图2 所示,第Ⅰ扇区起始矢量为U4,终止矢量为U6,根据伏秒平衡法则,可将Us分解为U4和U6两个基本矢量。
为了分析方便,以Ts为基值对Tx、Ty、Tz进行归一化处理,归一化的基本矢量维持时间以Txn、Tyn、Tzn表示。
由投影法可得
根据式(4)、式(6),结合和差化积公式计算可得

由式(7)可知,当合成空间矢量Us位于第Ⅰ扇区时,归一化的基本矢量维持时间可以从直接得出。对其他扇区情况进行分析可以得到类似的结论,在此不再赘述。
2.3 占空比计算
根据Us所在扇区起始矢量、终止矢量中a、b、c三相的上半桥导通情况,结合归一化的基本矢量维持时间,计算a、b、c 三相PWM 模块的占空比。首先以扇区1 为例计算a、b、c 三相PWM 模块的占空比,然后得出统一的简化计算公式。
2.3.1 扇区1 占空比计算
采用七段式SVPWM 方法对a、b、c 三相的输出进行调制,扇区Ⅰ中a、b、c 三相的SVPWM 波形如图4 所示。

图4 扇区Ⅰ中a,b,c 的SVPWM 调制波形Fig.4 SVPWM modulation waveforms of a,b,and c in Sector Ⅰ
扇区Ⅰ中的合成空间矢量由基本矢量U4、U6、U0、U7合成。由图4 可知,a 相PWM 模块的高电平持续时间为Tx+Ty+Tz/2,b 相PWM 模块为高电平持续时间为Ty+Tz/2,c 相PWM 模块为高电平持续时间为Tz/2。
记a、b、c 三相的PWM 占空比为Da、Db、Dc,由归一化的基本矢量维持时间Txn、Tyn、Tzn计算占空比,并代入式(7),根据(a',b',c')三相参考系的标幺化分量得到扇区Ⅰ内a、b、c 三相PWM 占空比为
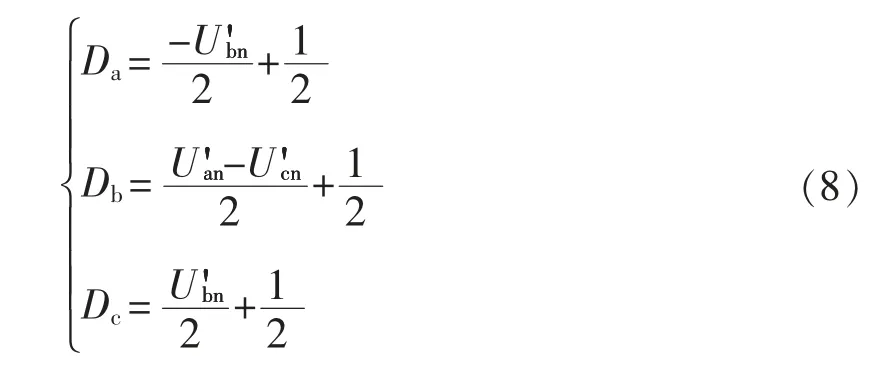
2.3.2 占空比的统一简化计算公式
对式(8)引入中间变量Ta、Tb、Tc,令

可得占空比为

对扇区Ⅱ~Ⅵ做类似扇区Ⅰ的分析。当Us位于扇区Ⅰ或Ⅳ时,令Ta、Tb、Tc按式(9)取值;当Us位于扇区Ⅱ或扇区Ⅴ时,令Ta、Tb、Tc取值为

当Us位于扇区Ⅲ或Ⅵ时,令Ta、Tb、Tc取值为

然后,统一按照式(10)计算a、b、c 三相PWM的占空比。计算出占空比后,将MCU 的PWM 模块设置为中心对齐模式,根据逆变器的开关频率和占空比设置PWM 寄存器,便可以实现对电机a、b、c三相相电压的SVPWM。
综上,SVPWM 算法流程如图5 所示。
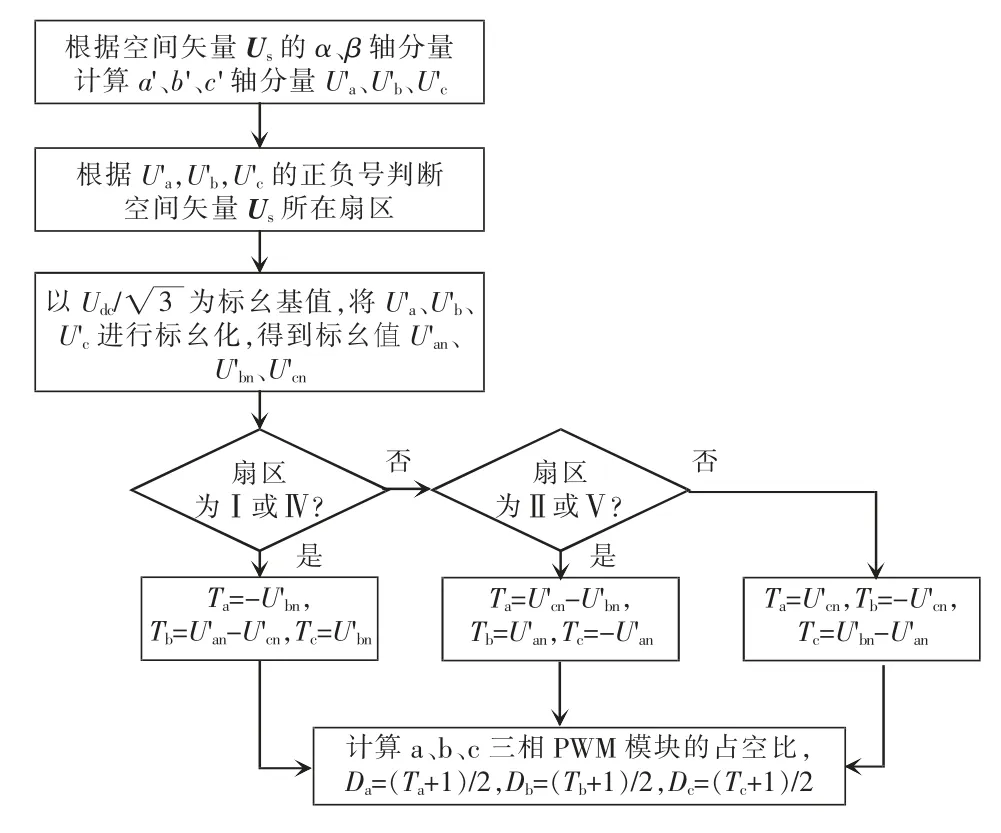
图5 SVPWM 简化算法流程Fig.5 Flow chart of simplified SVPWM algorithm
3 SVPWM 简化算法的仿真及验证
SVPWM 简化算法的Simulink 仿真模型如图6所示。仿真模型的输入为逆变器直流母线电压和相位相差90°、频率为50 Hz 的两路正弦信号,空间矢量Us由这两路正弦信号合成。模型输出为a、b、c 三相PWM 模块的占空比。选择直流母线电压为400 V,正弦信号幅值为V,以使得调制比M 为1。

图6 SVPWM 简化算法模型Fig.6 Model of simplified SVPWM algorithm
首先,根据式(4)进行相位超前逆Clarke 变换,将合成矢量Us的α 轴分量Uα和β 轴分量Uβ转换为(a',b',c')三相参考系下的a' 轴分量轴分量轴分量。通过S-Function 的方式,根据的正负号计算扇区,然后对标幺化,根据标幺化的和扇区计算a、b、c 三相PWM 模块的占空比。仿真结果如图7 所示。
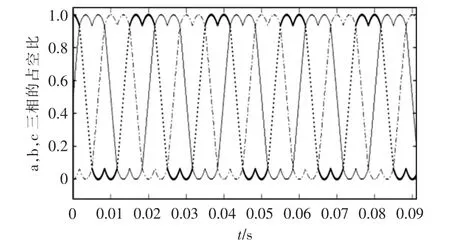
图7 SVPWM 简化算法仿真结果Fig.7 Simulation result of simplified SVPWM algorithm
为了验证SVPWM 简化算法的正确性,在Simulink 中搭建如图8 所示的对比验证模型,PWM Generator(三相两电平)的输入为400 V 的直流母线电压和幅值为V 的三相正弦信号,采用空间矢量调制方式。
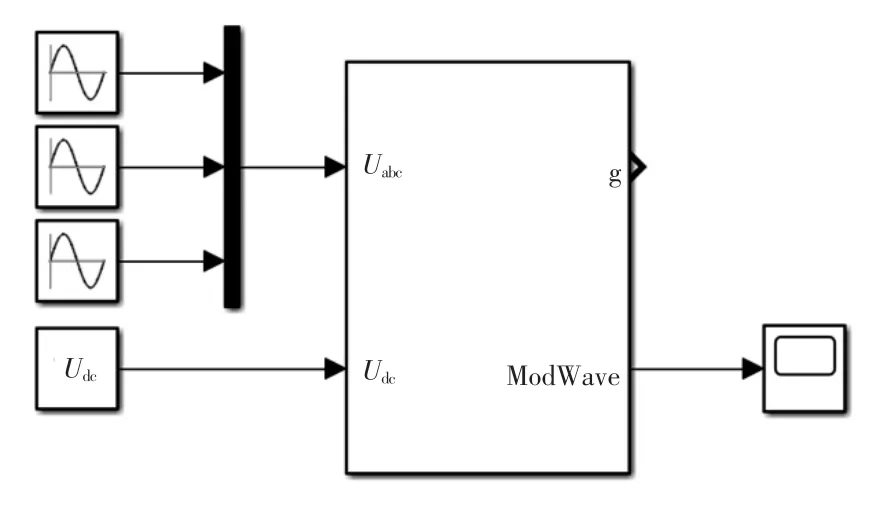
图8 SVPWM 验证模型Fig.8 Verification model of SVPWM algorithm
为了方便进行对比,将仿真生成的a 相调制波数据导入Matlab 的工作空间中,进行平移和归一化处理后调用绘图函数以实线线型绘制,将SVPWM 简化算法模型中的a 相占空比数据导入Matlab 的工作空间中,调用绘图函数以星型点阵形式绘制,对比波形如图9 所示。
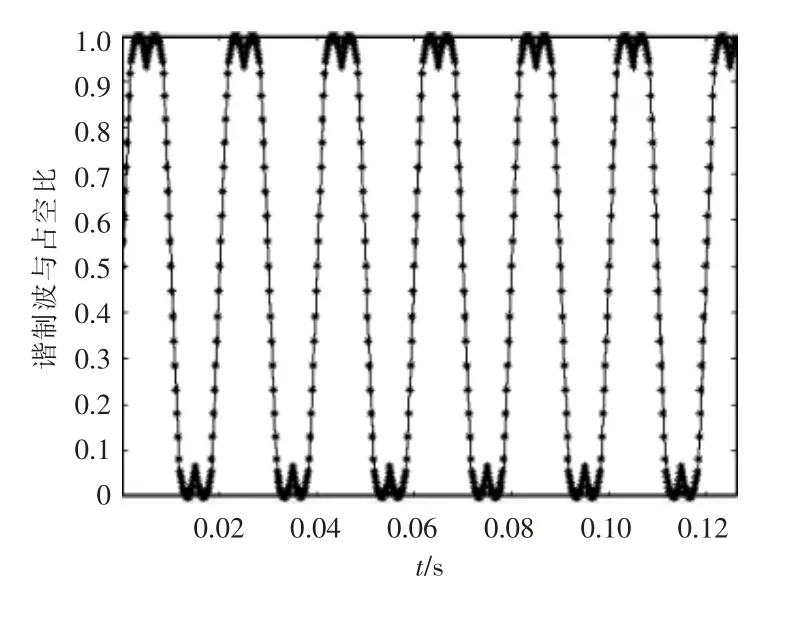
图9 波形对比Fig.9 Comparison of waveform
根据伏秒平衡原理[10],占空比和调制波成等效关系。图9 中占空比波形和调制波波形完全一致,验证了SVPWM 简化算法的正确性。
4 结语
本文提出一种新的三相参考系,利用参考系各轴和SVPWM 扇区边界的几何关系,通过各轴分量的正负号判断合成空间矢量所在扇区,简化了扇区计算。同时,直接根据标幺化的新参考系各轴分量计算a、b、c 三相PWM 模块的占空比数据,简化了占空比的计算和设置。该方法可以降低电流环控制中的PWM 占空比更新延迟,提高电流环带宽,从而提高电机控制的响应速度。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
计算机技术与发展(2022年7期)2022-08-02
防爆电机(2022年3期)2022-06-17
南北桥(2022年2期)2022-05-31
防爆电机(2022年1期)2022-02-16
电脑知识与技术(2018年12期)2018-07-12
电机与控制学报(2018年9期)2018-05-14
电脑知识与技术·经验技巧(2017年9期)2018-02-24
新课程·下旬(2018年7期)2018-01-19
中学物理·高中(2016年1期)2016-05-26