基于子模块组合的模块化多电平变换器简化空间矢量调制策略
2022-06-03 08:41:42白志红李奕飞王伯荣
电源学报 2022年3期
白志红,李奕飞,王伯荣,马 皓
(浙江大学电气工程学院,杭州 310027)
模块化多电平变换器MMC(modular multilevel converter)具有模块化、可拓展性和输出电压谐波小等突出优点,在高压直流HVDC(high-voltage direct current)输电和中压电机驱动领域得到了广泛的应用[1-3]。调制策略对MMC 的稳定运行有着重要的作用。MMC 的调制策略主要包括最近电平调制NLM(nearest level modulation)策略[4]、基于载波的脉 宽调制策略和空间矢量调制SVM(space vector modulation)策略[5]。NLM 控制策略实现方式简单,采用电容电压排序的均压方式,当子模块数目较少时,输出电压谐波较大,适用于子模块数量多的场合[6]。基于载波的脉宽调制策略主要分为载波移相调制CPSPWM(carrier phase shifted PWM)策略[7-8]和载波层叠调制CDPWM(carrier disposition PWM)策略[9]。这两种调制方式都具有开关谐波小的特点,在子模块数量较少的情况下优势明显。SVM 控制策略可以实现对参考电压的矢量跟踪,具有灵活选择矢量和切换序列,便于数字实现、直流电压利用率高和输出电压畸变率小等优点[10],更适合中压电机等应用场合。
现如今,越来越多的人关注SVM 在MMC 中的应用[11-17]。文献[10]基于两电平SVM,通过计算推导拓展到了多电平SVM;文献[12]在子模块故障情况下的空间矢量图中,对参考矢量进行定位、合成;文献[13]提出了一种可以控制电容电压和环流的SVM通用算法。这些文献都可以实现SVM,但计算过程较为繁琐。目前,SVM 在MMC 应用中存在的主要问题是随着子模块数量的增加,SVM 空间矢量呈指数倍增加,导致相应的计算负担也大大增加。所以很多研究人员专注于简化SVM 应用于MMC 时的计算。文献[14]独立控制MMC 的上下桥臂,在abc坐标系中实现了SVM;文献[15]在60°坐标变换的基础上,实现MMC 的SVM 算法;文献[16]提出了3种简化参考矢量定位的方法。这些文献都在一定程度上简化了计算,但计算负担依然较重。文献[17]将单个子模块组合成子单元,使用传统的两电平SVM控制子单元。这种方法计算复杂度低,但两电平SVM冗余矢量较少,其子单元控制的灵活性受到限制。
本文基于子模块组合的思想,将同一侧的3 个桥臂每6 个子模块组合为一个子单元,使用三电平SVM 分别控制每个子单元,并通过错时采样实现MMC 多电平的输出,以改善输出的谐波特性,最后结合电容电压排序策略对MMC 进行均压。与已有的方法相比,本文所提SVM 控制策略不需要分析和绘制庞大的多电平空间矢量图,实施简单灵活,计算简便,扩容性好。通过实验对本文所提方法进行了验证。
1 所提空间矢量调制策略的原理
图1 为采用半桥子模块的MMC 的一相拓扑结构,图中:uup、un和vup、iun分别为u 相上、下桥臂子模块输出电压之和及电流之和;iu为u 相电流。为实现空间矢量调制的实现,将MMC 同侧桥臂的每6 个子模块进行组合,本文称其为子单元SU(subunit),其中编号j=P,N;i=1,2,…。三电平子单元如图2 所示。
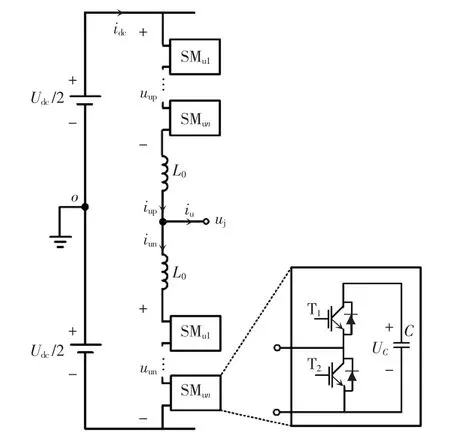
图1 单相MMC 的拓扑结构Fig.1 Topology of single-phase MMC
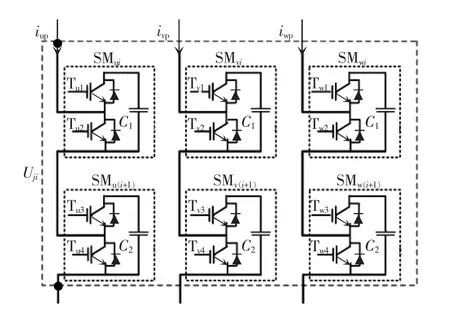
图2 三电平子单元Fig.2 Three-level subunit
通过子模块组合,MMC 可以被分为多个子单元,而每个子单元中的开关管驱动信号可以通过三电平SVM 算法来得到,因此MMC 的SVM 过程就被分解为多个三电平SVM 算法的实现,具体实现原理如下。
首先采用3 种状态P、O、N 对子单元每相输出情况进行定义,如表1 所示。P 表示该相输出电压为2Uc,对应的开关模式[Tj1,Tj2,Tj3,Tj4]为[1,0,1,0],此时有2 个子模块投入;O 表示该相输出电压为Uc,对应的开关模式[Tj1,Tj2,Tj3,Tj4]为[1,0,0,1]或者[0,1,1,0],此时有一个子模块投入;N 表示该相输出电压为0,对应的开关状态[Tj1,Tj2,Tj3,Tj4]为[0,1,0,1],此时子单元被旁路。
根据表1 可以得到子单元的空间矢量如图3所示,图中Urp为参考矢量。由图可见,子单元的空间矢量图包含6 个大扇区,每个大扇区被分为6 个小扇区。以大扇区I 为例,所包含的小扇区标号用阿拉伯数字1~6 表示。根据每个矢量的长短,可以将其分为大矢量、中矢量和小矢量。可以看出,在一个子单元的空间矢量中共有19 个矢量,包括6 个大矢量、6 个中矢量、6 个小矢量和1 个零矢量。其中,小矢量和零矢量有冗余矢量。此外,由于每个O状态对应有2 种开关模式,因此基于表1 和图3 的子单元的空间矢量调制过程要比传统三电平调制过程更加灵活。
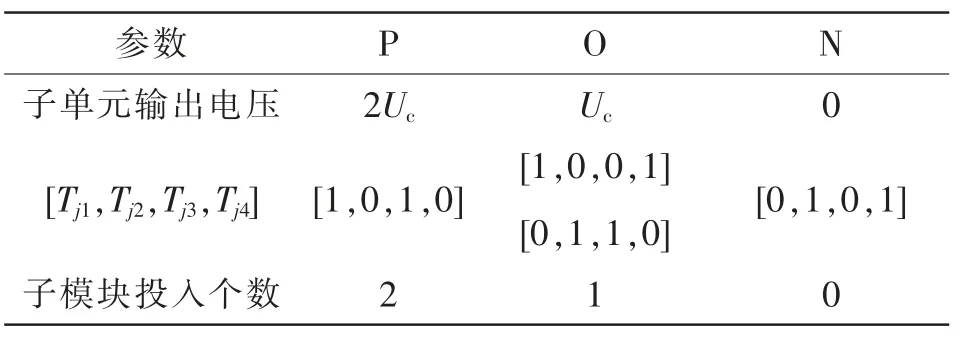
表1 子单元状态的定义Tab.1 Definition of subunit statuses
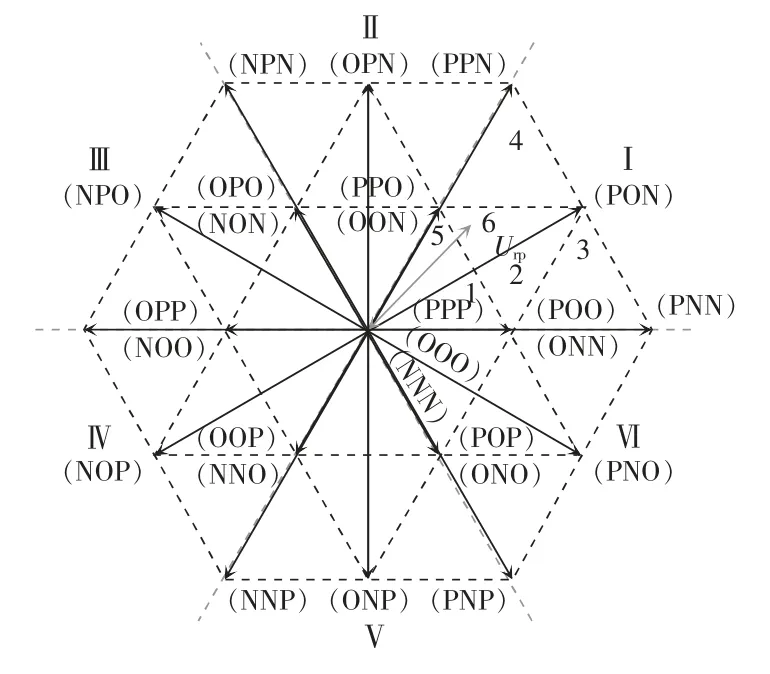
图3 三电平子单元空间矢量Fig.3 Space vectors of three-level subunit
为了改善MMC 整体输出的谐波特性,本文对各个子单元的采样进行了错时处理,即将对每个子单元调制波的采样时间均匀地错开。设采样频率fs与调制波频率f0比为k0,同一子单元2 次采样的间隔δ=2π/k0,错时采样过程如图4 所示(这里假设所有子单元采用同一个调制波)。若MMC 一个桥臂有n 个子单元SUp1,SUp2,…,SUpn,相邻子单元之间的采样时间间隔θ=δ/m,即同一个桥臂子单元采样点在一个采样周期内均匀分布。当第一个子单元采样起始点角度为0°时,第i 个子单元采样起始点角度为(i-1)θ,其中1≤i≤n。
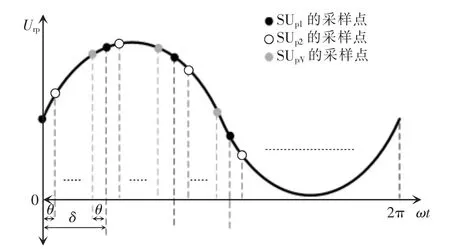
图4 错时采样示意Fig.4 Schematic of discrete sampling
本文所提SVM 方法的整体实现框图如图5 所示。首先,对每个子单元的调制波uref进行错时采样,采样时间分别为ts1,ts2,…,tsn,然后根据每个子单元采样值Uref1~Urefn,利用三电平SVM 算法计算得到每个子单元对应的驱动信号,但此时得到的驱动信号并没有考虑每个子模块电容电压的均衡问题,因而无法保证子模块电容电压都接近其理想值。为此,本文对各子模块电容电压uc1,uc2,…,ucn进行排序,并将排序结果应用到所提SVM 方法中,以期实现电容电压的均衡,如图5 中“电容电压均衡策略”方框所示。根据SVM 算法计算出每个桥臂需要投入的子模块数量,再结合所在桥臂电流方向以及子模块电容电压排序结果选择需要投入的子模块,具体算法实现流程如图6 所示。
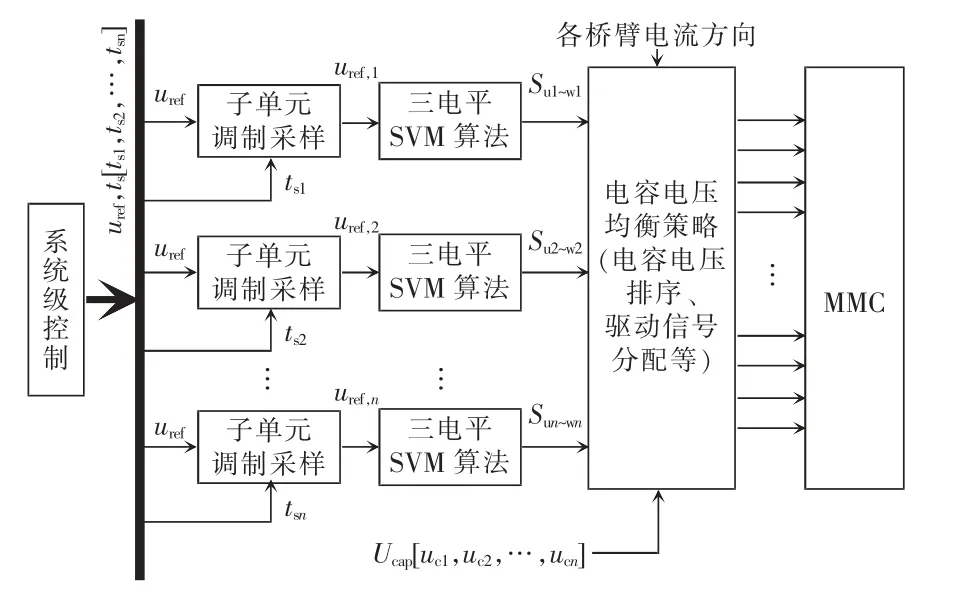
图5 所提简化SVM 策略的整体实现框图Fig.5 Block diagram of the overall implementation of proposed simplified SVM strategy
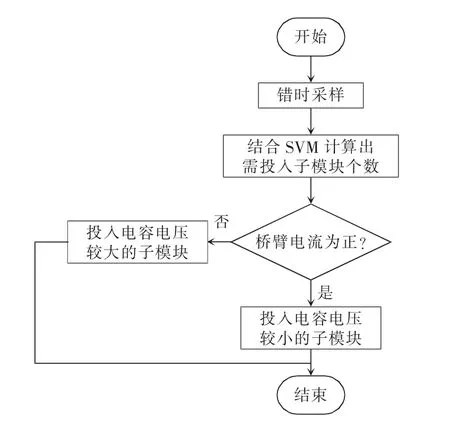
图6 实现电容电压均衡的算法流程Fig.6 Flow chart of the algorithm to realize capacitor voltage balancing
2 实验结果
本文搭建了一套三相五电平MMC 实验平台样机,如图7 所示。控制系统采用型号TMS320F28335的DSP 和型号EP3C16Q240C 8N 的FPGA 组成双级结构,DSP 主要用来完成SVM 算法,FPGA 主要用于实现电容电压排序以及驱动脉冲的分配,在此样机上验证所提出的调制策略。实验平台参数如表2 所示。

图7 三相MMC 实验平台Fig.7 Experimental platform of three-phase MMC
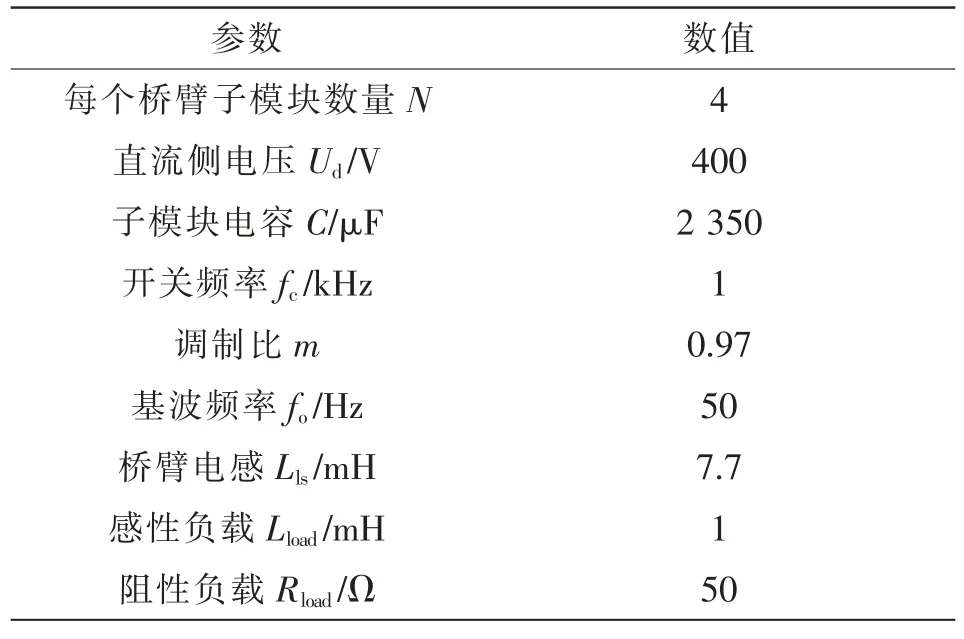
表2 实验平台参数Tab.2 Parameters of experimental platform
实验测试结果如图8 所示,展示所提调制方法下输出电压电平数与子模块数量的关系,图中,Ucp1和Ucn1分别为所在相上、下桥臂第1 个子模块的电容电压。图8(a)和(b)分别给出了空载时的相电压和线电压波形,可以看出,相电压波形为5 电平脉宽调制阶梯波,线电压为9 电平脉宽调制阶梯波。图8(c)~(f)为带载运行测试波形,其中,图8(c)为负载电流波形,接近正弦波;图8(d)、(e)和(f)给出了每相的子模块电容电压波形,包含所在相的上、下桥臂各一个子模块的电容电压,可以看出,子模块电容电压稳定在100 V 左右,且波动很小。
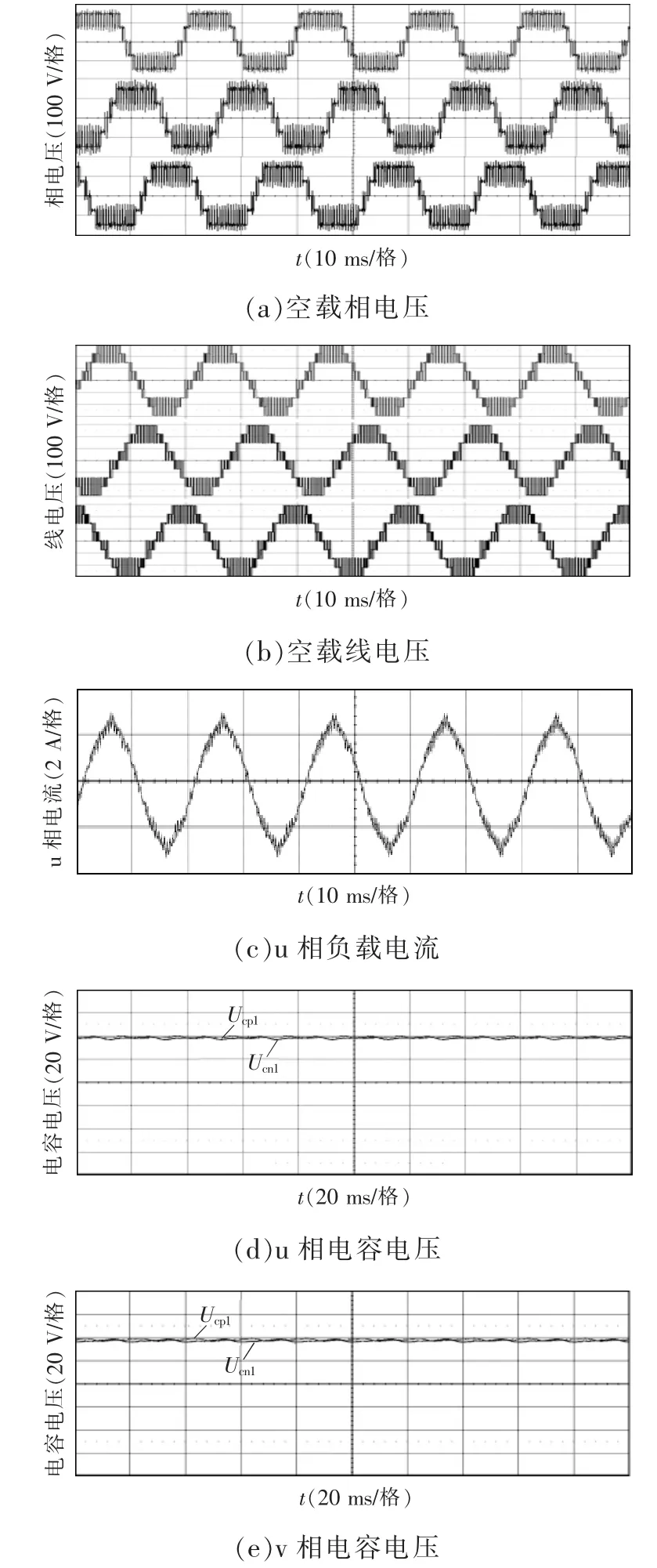
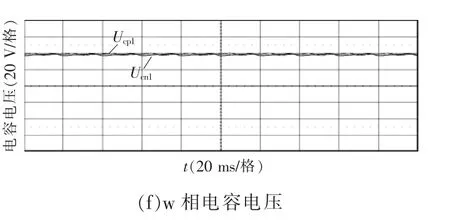
图8 实验结果Fig.8 Experimental results
3 结语
本文通过将MMC 每6 个子模块进行组合,提出了一种应用于MMC 的简化SVM 实现方法。采用所提方法,MMC 的空间矢量调制过程被分解为多个三电平SVM 算法的实现,不仅避免了复杂矢量图的绘制,更大大简化了运算过程。通过对子单元的调制波进行错时采样,实现了多电平输出,改善了输出谐波特性。此外,本文将电容电压排序结果应用到所提调制策略中,实现了电容电压的均衡。由于所提调制策略的实现不依赖于MMC 子模块数量的多少,因此很容易扩展到有更多子模块的MMC 拓扑中。实验结果验证了本文所提方法的可行性和有效性。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
现代防御技术(2016年1期)2016-06-01 12:13:28
电测与仪表(2016年22期)2016-04-12 00:19:58
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电源技术(2015年1期)2015-08-22 11:16:20
电源技术(2015年7期)2015-08-22 08:48:50
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
电测与仪表(2014年7期)2014-04-04 12:09:32
河南科技(2014年12期)2014-02-27 14:10:32