带LCL 滤波器的APF 新型预测电流控制策略
2022-06-03 08:42:20胡中玉
电源学报 2022年3期
佘 东,胡中玉
(1.四川机电职业技术学院电子电气工程系,攀枝花 617000;2.昆明学院机电工程学院,昆明 650214)
有源电力滤波器APF(active power filter)可接入电网来补偿一个或多个非线性负载所引起的畸变电流和谐波污染,故被广泛用于各种电力工业场合[1-3]。传统的APF 控制器架构为基于固定参考坐标系的αβ 控制结构和基于旋转参考坐标系的dq控制结构[4],前者为了控制以交流值出现的谐波分量,采用比例谐振控制器[5-6],后者则通过将dq 坐标系变换后将谐波分量转换为直流量,并经由PI 调节器进行无静差调节[7]。因此,两者都存在计算负担随谐波次数增加而增大的缺点。
随着控制技术的发展,预测控制逐渐成为研究热点[8-9],其基本原理是基于电路离散域数学模型,由当前采样值对状态变量的未来值进行预测,目前已经逐步应用于各类型电力电子设备,如电机驱动变频器、变流器和逆变器等[10-13]。文献[14]针对带L滤波器并网的APF 设计了比例预测控制器PPC(proportional predictive controller),其由APF 和L 滤波器的预测模型实现,并通过直接校正逆变单元输出电压来补偿由控制和测量采样引起的数字延迟;文献[15]结合使用了特定次谐波控制与预测控制用于多电平APF,但对象仅为使用L 滤波器并网的APF;文献[16]将神经网络方法引入到APF 控制设计中,但局限于理论分析和仿真计算,离实际工程应用还有距离;文献[17]开展了三相四线制APF 的多目标优化预测控制策略研究,但控制效果受限于开关频率;文献[18]针对单相电网中的APF 应用设计了积分预测控制器IPC(integral predictive controller),IPC 将每个基波周期中的多个采样点中的每一个样本的控制偏差与前一周期的控制偏差进行叠加,直到综合稳态误差控制为0,故与积分器的特性相似,同时与PPC 一样,IPC 直接作用于逆变单元的输出电压。
综上,本文设计一种新型的应用于带LCL 滤波器的APF 预测电流控制器。相对于L 滤波器,采用LCL 滤波器并网能实现在相同的电感量下更好的滤波效果,从而实现APF 更高的功率密度,但也存在固有谐振问题,从而设计阻尼算法来进行抑制。故新型控制器将PPC 和IPC 相结合,同时增设阻尼环节,实现对APF 的优化控制,同时保证计算量不随谐波次数增加而显著增大,有效地补偿高次谐波,对于不控整流器或脉冲宽度调制PWM(pulse width modulation)整流器等并网时的谐波补偿有较好的效果,进一步IPC 可补偿由参数扰动引起的模型误差。最后,通过实验验证其效果。
1 带LCL 滤波器的APF
带LCL 滤波器的APF 配置如图1 所示。
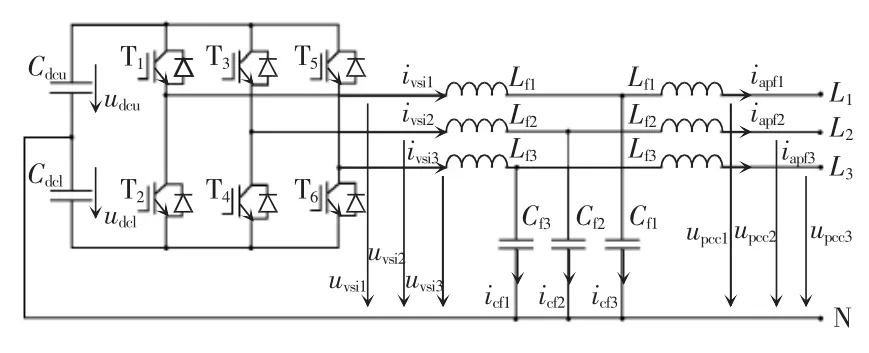
图1 带LCL 滤波器的APF 配置Fig.1 Configuration of APF with LCL filter
图1 中,APF 采用三相四线制,交流中性点与直流侧中点相连,这样可以分别控制APF 的输出电流iapfμ,μ=1,2,3。直流侧配置2 个电容以引出中线,上下两组电容分别为Cdcu和Cdcl,对应电容电压为udcu和udcl。直流侧电容后端接入三相逆变单元,三相逆变单元的输出经由LCL 滤波器接入交流电网,LCL 滤波器的数学模型为
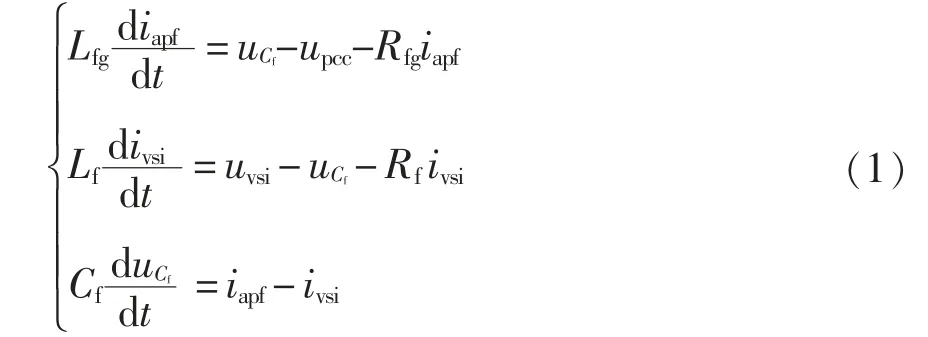
式中:Lf、Rf分别为逆变侧滤波电感及其寄生电阻;Lfg、Rfg分别为网侧滤波电感及其寄生电阻;Cf、uCf为滤波电容及其对应电压;iapf为APF 输出电流;ivsi为三相逆变单元输出电流;uvsi为三相逆变单元输出电压;upcc为PCC 点电压。
LCL 滤波器的谐振频率为

式中:fres为谐振频率;Lg为电网电感。推导可得s 域中的LCL 滤波器的传递函数GLCL(s)为
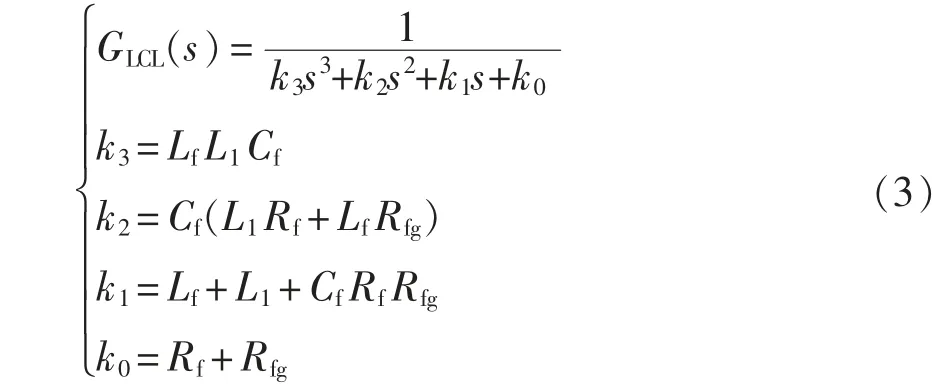
式中:L1=Lfg+Lg;k0、k1、k2、k3为LCL 滤波器连续时间域传递函数的系数。为了更好地匹配连续时间域和离散时间域模型,采用如下双线性变换
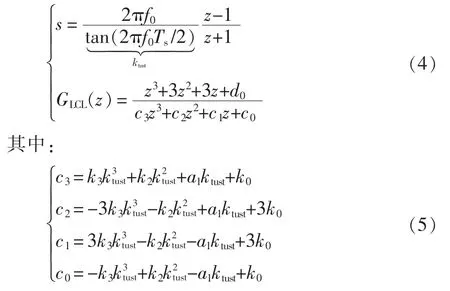
式中:GLCL(z)为LCL 滤波器的离散时间域传递函数;Ts为采样周期;f0为预翘曲频率,f0=fRes;c0、c1、c2、c3为LCL 滤波器离散时间域传递函数的系数;d0为LCL 滤波器离散时间域传递函数的常系数。
2 APF 的预测电流控制器设计
三相四线制APF 每相单独进行控制,每相控制器结构可分为直流侧电压控制、锁相环、参考值生成和电流控制4 个环节,其控制结构如图2 所示。
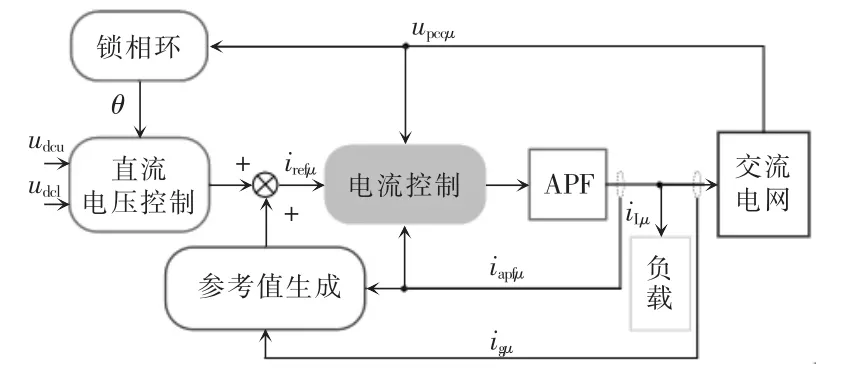
图2 APF 的控制结构Fig.2 Control structure of APF
2.1 直流侧电压控制
直流侧电压的控制是通过PI 控制器实现的,控制目标是保持上下电容组电压之和udc=udcu+udcl趋近于设定值。APF 仅对电网注入谐波功率,故只消耗少量有功功率补偿给自身损耗。由于直流侧中性点的引出形成了三相四线制,故直流侧电压控制器还需要平衡上下电容器的电压,这通过设置比例控制器完成。
2.2 锁相环
由于电网基频fg存在一定变化,而Ts固定,这使得每个基波周期的采样点数N 是变化的。对于预测电流控制器而言,需要保持每个基波周期的采样数N 恒定,因此需引入锁相环。锁相环可保持与基频同步,调整Ts,使得N 恒定,同时还提供了公共耦合点PCC(point of common coupling)处电压的相角。
2.3 参考值生成
APF 的电流参考值是由直流侧电压控制输出值和与负载相关的电流参考值叠加构成的。负载电流iLμ可分为基波分量和谐波分量,即

式中,iL1μ和iLhμ分别为负载电流的基波分量和谐波分量。其中iL1μ可通过二阶广义积分器得到,但是其带宽较窄也会导致动态性能降低,这意味着负载电流变化后,参考值需要耗时几个基波周期才能达到稳定,故本文采用基于基波有功功率和无功功率的计算方法确定iL1μ。
通常情况下,电流i(t)和电压u(t)为
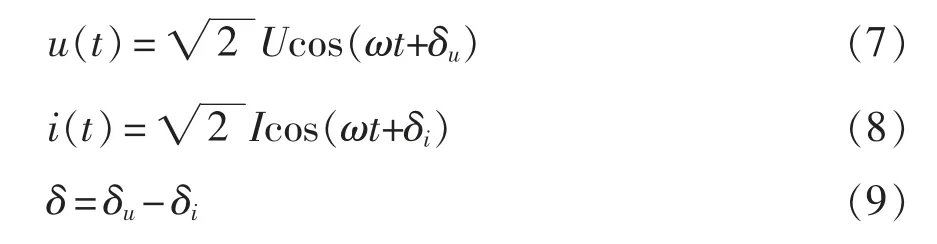
式中:U、δu和I、δi分别为电压和电流的有效值及相角;δ 为相角差。故瞬时功率p(t)为

进一步推导可得
式中,P1、Q1分别为瞬时基波有功功率和无功功率,计算一个基波周期内的功率平均值可消除交流分量,则有


图3 为功率计算框图。图3 中,电压的正交分量由二阶广义积分器提供,其被调节到基频,并由PLL 来适应基频变化。由于PCC 电压仅发生缓慢的变化,因此对PCC 电压进行滤波可忽略动态,即将二阶广义积分器的带宽调整为非常窄,则电压基本无谐波。基波有功功率和无功功率的计算是使用采样点为N 的滑动平均滤波器完成的,对应的是基波周期。
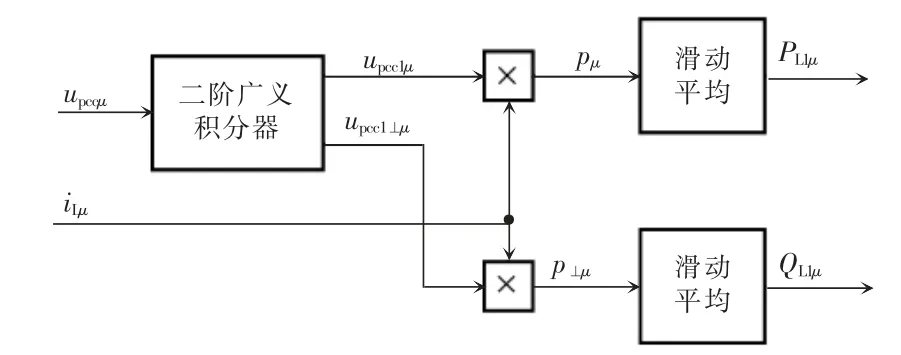
图3 功率计算框图Fig.3 Block diagram of power calculation
进一步,将每一相的基波有功功率和无功功率PL1μ和QL1μ写成视在功率的复数形式,有

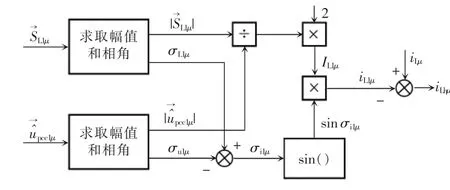
图4 电流参考值生成框图Fig.4 Block diagram of current reference generation
2.4 电流控制
电流控制基于PI 调节器、PPC、IPC 和阻尼算法实现。由于三相逆变单元通过LCL 滤波器并入电网,故需采用阻尼算法来进行稳定,图5 所示为电流控制框图。
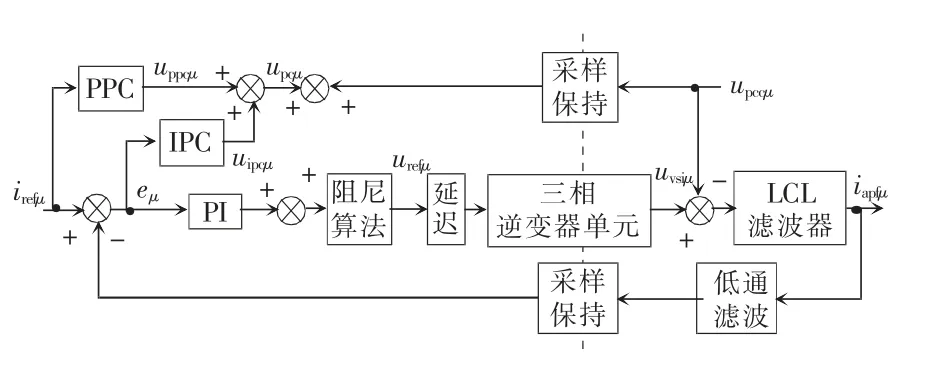
图5 电流控制框图Fig.5 Block diagram of current control
为了优化整定PI 控制器参数,对LCL 电路采用L 近似,即只考虑低频段特性,忽略滤波电容的影响。由于无源阻尼方案抑制LCL 滤波器的谐振会引起额外的损耗,故通过控制算法进行有源阻尼设计。为了不增加对电容电压或电流的测量,采用文献[19]中提出的主动阻尼策略,基于在电流环正向通路中使用陷波滤波器来抑制谐振。其陷波滤波器的传递函数GNF(z)[19]为
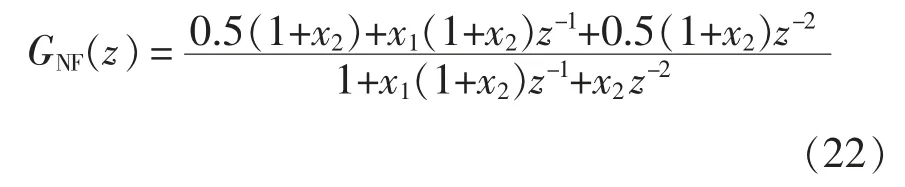
式中,x1、x2为陷波滤波器参数。电流控制中PPC 控制器一方面用于补偿由测量和滤波引起的延迟,另一方面用于补偿滤波点处的压降。电流闭环传递函数GCμ为
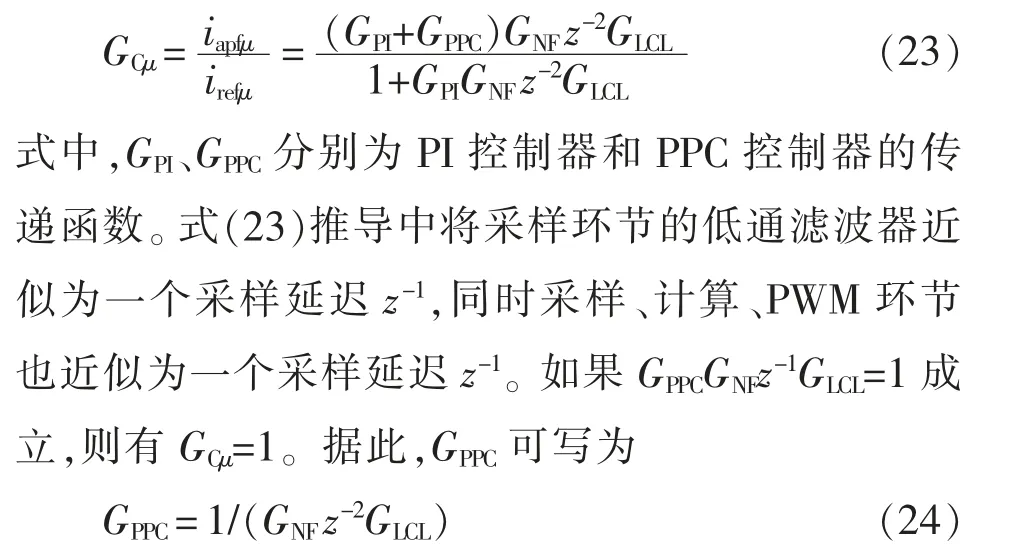
为了确保系统的稳定性,补偿陷波滤波器是没效的,故进一步导出

式(25)中,1/GLCL较易计算,因为其分子和分母多项式的次数相等,而z2构成了GPPC的输入和输出间的非因果关系,这意味着还需要参考电流的未来值,可利用稳态下参考电流的周期性得到,则有

式中:irefμk、irefμ(k+2)分别为第k 个和第k+2 个步长的参考电流;irefμ(k-N)、irefμ(k+2-N)为对应上一个基波周期的参考电流。由于式(26)在负载电流处于稳态时才是准确的,故需判断稳态条件,这可通过分析参考电流差值

完成。式中,Δirefμk为irefμk和irefμ(k-N)的差值。若Δirefμk小于APF 额定电流值的3%,则式(26)视为有效,并使式(25)可重新写为

PI+PPC 控制器的闭环伯德图如图6 所示,可见,控制器可很好地跟踪3 kHz 以下频率的谐波,在更高的频率范围陷波滤波器将引起主动阻尼,其设计带宽为2.5 kHz。对比图6 中PI 控制器的伯德图,PI+PPC 控制器的效果更好。
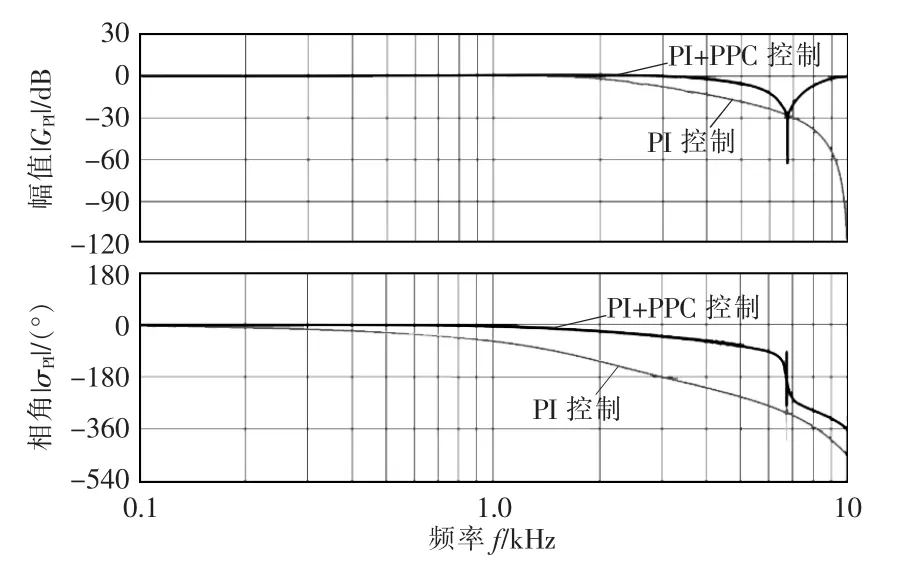
图6 电流闭环控制器的伯德图Fig.6 Bode diagram of current closed-loop controller
由于参数可能存在扰动,LCL 滤波器的精确建模是难以实现的,因此,仅使用PPC 的电流控制器可能无法准确跟踪参考电流。为此,引入了IPC 控制器。
IPC 在每个基波周期的N 个采样点处进行积分处理,并实现了循环缓冲区,即在第k 个步长将控制误差eμk乘以积分增益KIPC并叠加至前一个基波周期的x(k-N),则有

考虑到采样和控制延迟为2 个步长,因此实际上需要在采样点k+2 处进行处理。根据式(26),可将式(29)改写为

由于IPC 的结构中包括有N 个离散积分器,故电流控制器设计中在PPC 之外使用IPC,而不是单独使用。同时,IPC 的功能主要是补偿PPC 模型中的误差,所以IPC 的输出进行一个限幅设计,即设置一个最大值作为上限,以保持控制系统的稳定性。
3 实验验证
为了验证新型预测电流控制器的效果,搭建了APF 并网实验平台,如图7 所示,并开展了实验研究。其中预测电流控制算法由DSP 芯片TMS320 F28335 实现,同时辅以AD 采样芯片和FPGA 芯片进行外围电路实现。APF 基于三相两电平逆变电路实现,主体为Infineon 公司的IGBT 及其驱动电路,开关频率为20 kHz。对于电能质量分析采用DEW ETRON 公司的电能质量分析仪,型号为DEWE-2600,采样率为200 kS/s,总谐波畸变率THD(total harmonic distortion)可计算到第50 次谐波。其他实验系统参数为:电网额定频率fn=50 Hz,采样频率fs=20 kHz,PCC 点相电压峰值UPCCm=325 V,直流电压udc=750 V,直流电容Cdc=7 mF,APF 最大输出相电流Iapfm=16 A,APF 额定容量Sn=7.8 kV·A,逆变侧滤波电感Lf=0.7 mH,逆变侧滤波电感寄生电阻Rf=50 mΩ,网侧滤波电感Lfg=0.7 mH,网侧滤波电感寄生电阻Rfg=50 mΩ,滤波电容Cf=1.65 μF,负载功率Pload=12.8 kW,LCL 滤波器谐振频率fRes=6 622 Hz,电流控制器比例增益KP=11.2,电流控制器积分增益KI=0.008,IPC 控制器积分增益KIPC=0.5。

图7 APF 并网实验平台Fig.7 APF grid-connected experimental platform
考虑对比实验更能突出所设计控制方案的优势,对只使用PPC 控制器和结合使用PPC 和IPC控制器的2 种策略进行动、静态实验对比分析。
3.1 稳态实验结果
只使用PPC 控制器以及结合使用PPC 和IPC控制器的2 种控制方案的稳态对比实验结果如图8 所示,图中的实验数据采用标么值形式,其中Iapfm为电流基值,UPCCm为电压基值。图8(a)为负载电流iL和PCC 点电压uPCC的波形,可见iL的波形包含有大量谐波。图8(b)和图8(c)为采用PPC 控制器的APF 输出电流iapf和电网电流ig的波形,其中通过APF 补偿后的电网电流THD 降低至3.2%,较接近正弦波,但由于上文所述存在模型参数扰动等因素使其正弦度依然不高。图8(d)和图8(e)为使用PPC+IPC 控制器的iapf和ig的波形,其中通过IPC补偿后的电网电流THD 进一步降至1.7%,较之单独使用PPC 控制器的效果更好。图8(f)为不同控制方案下ig的谐波分析。
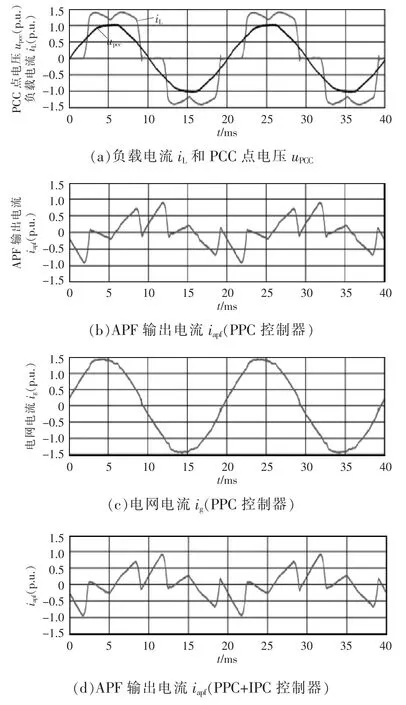
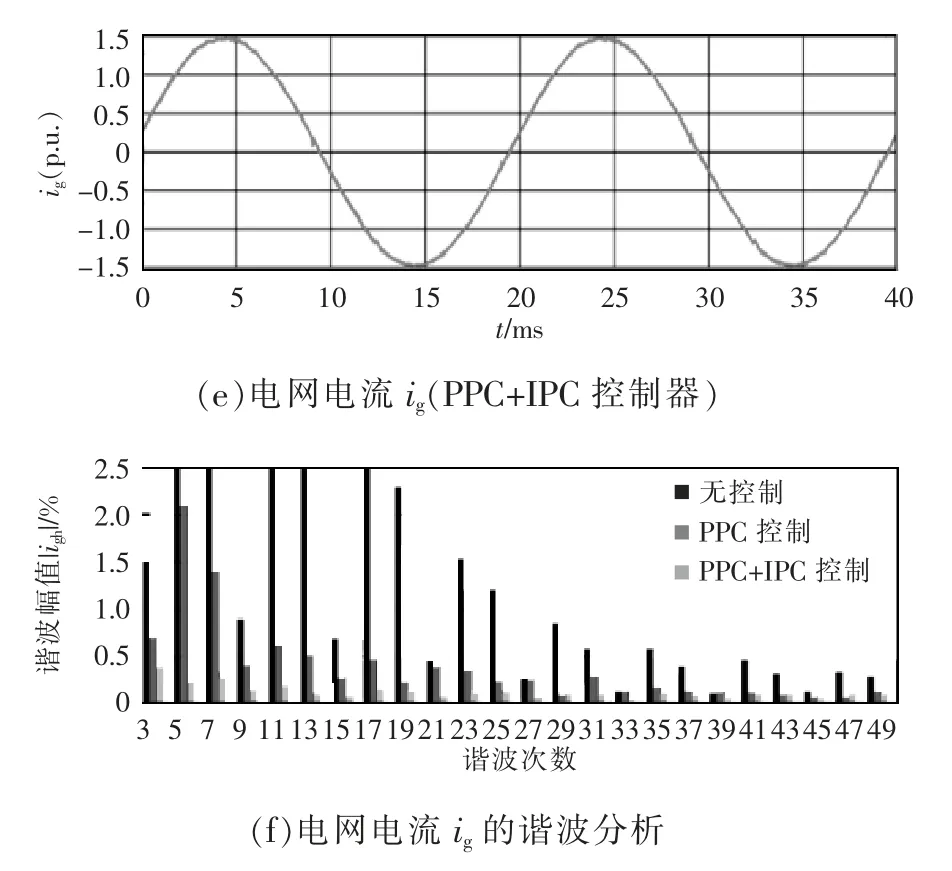
图8 稳态实验结果Fig.8 Steady-state experimental results
3.2 动态实验结果
进一步考核所设计控制方案的动态性能,首先设置突加负载来进行动态实验验证,结果如图9 所示。系统初始为空载,在t=10 ms 左右将负载接入,图9(a)为负载电流iL和PCC 点电压uPCC的动态波形,图9(b)和图9(c)为采用PPC 控制器的APF 输出电流iapf和电网电流ig的动态波形,图9(d)和图9(e)为使用PPC+IPC 控制器的iapf和ig的动态波形。对比2种方案可以看出,系统动态响应是类似的,较为迅速,这是因为在初始的一个基波周期内,PPC 补偿了电网电流中的大部分谐波,趋于稳态后,谐波由IPC 逐渐补偿。
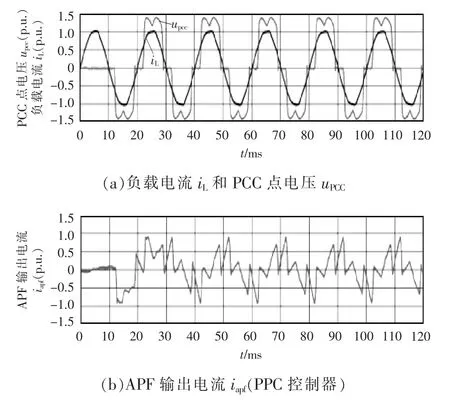
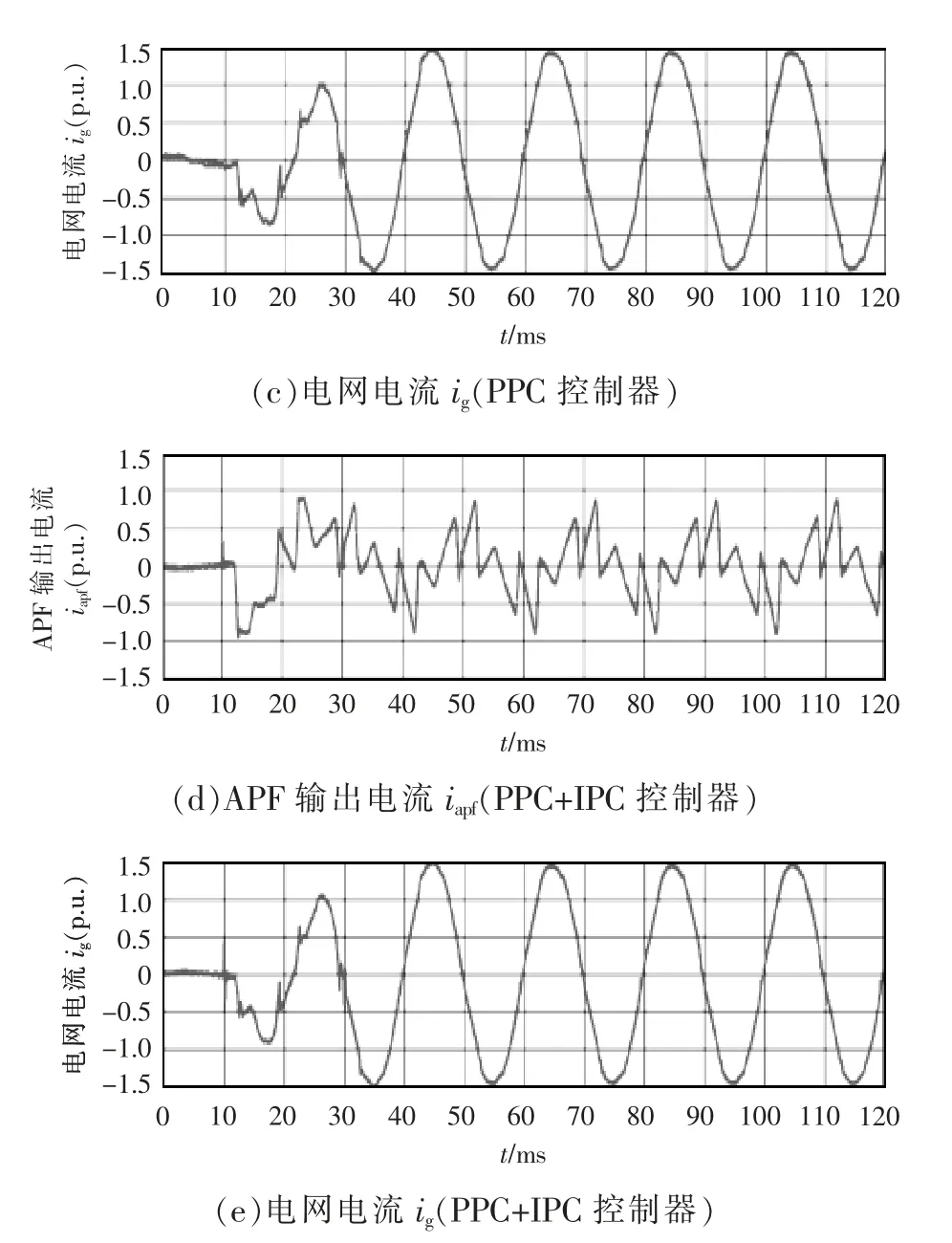
图9 动态实验结果Fig.9 Dynamic experimental results
4 结论
本文设计了一种带LCL 滤波器的APF 新型预测电流控制器,控制器包含直流侧电压控制单元、锁相环单元、参考值生成单元和电流控制单元4 个主要组成部分,通过理论分析和实验验证,可得结论如下:
(1)不同于传统的APF 控制器,新型预测电流控制器破除了计算负担随谐波次数增加而增大的缺点;其除了使用常规的PI 调节器外,还结合使用了PPC 和IPC 结构,能有效补偿由采样、计算和PWM 所引起的控制延迟,这对于具有快速电流变化动态的负载,如二极管不控整流器产生的高次谐波,具有非常好的补偿效果。
(2)对比实验结果表明,IPC 可补偿由参数扰动引起的模型误差,进而优化并网电流的谐波特性,且PPC+IPC 控制器动态性能不受影响,在突加负载动态下能实现快速响应。
(3)下一步的研究方向是设计容错控制策略,使当APF 单相故障时依然保持一定的滤波效果。
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
测控技术(2018年9期)2018-11-25 07:44:40
电测与仪表(2016年5期)2016-04-22 01:13:44
电测与仪表(2016年9期)2016-04-12 00:29:58
电测与仪表(2016年14期)2016-04-11 12:32:40
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:47
电源技术(2015年11期)2015-08-22 08:50:58
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年8期)2015-04-09 11:50:00
电测与仪表(2015年12期)2015-04-09 11:44:44