基于智能网联车辆编队的高速公路协同合流控制方法
2022-04-18 09:22:18高志军王江锋董佳宽罗冬宇闫学东
东南大学学报(自然科学版) 2022年2期
高志军 王江锋 陈 磊 董佳宽 罗冬宇 闫学东
(北京交通大学综合交通运输大数据应用技术交通运输行业重点实验室, 北京 100044)
合流区是制约高速公路高效运行的主要瓶颈,特别是在高交通需求条件下,主路和匝道交通需求超过合流区通行能力时,拥堵已成为常态.传统智能交通主要通过入口匝道流量控制[1]和可变限速[2]2种方法缓解合流区拥堵,但这种节点式的控制方法难以消除合流冲突和提高车辆合流过程的协调性,且无法解决交通需求较高时的拥堵问题.近年来,智能网联车辆(connected and automated vehicle, CAV)的可控性使得基于CAV协同合流的控制方式成为破解这一问题的重要手段.
协同合流控制方法是通过控制中心协调主路和匝道CAV通过合流点的时间和速度,避免二者在合流点产生冲突.现有方法主要是单个主路车辆与匝道车辆之间的协同(single vehicle based cooperative merging, SVBCM).SVBCM策略的研究主要包括2个方面: ①车辆合流顺序优化[3-6];②合流过程车辆轨迹优化[7-10].车辆合流顺序优化一般是以最大化通行效率为目标,对若干辆匝道车辆和主路车辆的合流顺序进行优化,以确定每辆车通过合流点的时间.如Pei等[3]利用动态规划算法求解合流顺序优化模型,Xie等[4]以所有车辆通过合流区上游一定距离范围内的速度之和最大为目标,对主路和匝道车辆通过合流点的顺序和轨迹进行优化.在Letter等[5]和Hu等[6]的研究中,则以合流过程平均速度最大为目标.合流过程车辆轨迹优化一般是在车辆合流顺序优化的基础上,以能耗或舒适性为优化目标,优化车辆通过合流点的时空轨迹.如文献[7-9]以加速度为决策变量,利用庞特里亚金极小值原理优化车辆通过合流点的轨迹.罗孝羚等[10]则采用了GPOPS工具对车辆轨迹进行优化.
在SVBCM策略的基础上,文献[11-13]提出了考虑主路CAV编队的合流策略,主路CAV以车队行驶,匝道CAV通过寻找主路车队间的间隙进行合流.由于主路车队内部车头时距很小,可以有效提高主路通行能力,以应对主路流量较高的合流问题.此后,Kumaravel等[14]研究了主路和匝道车辆均为车队的合流顺序优化问题,但CAV的初始状态即为车队,没有考虑编队过程,且初始化的CAV车队不一定是最佳的编队方案.Xu等[15]提出了基于车组的合流顺序寻优方法,将车头时距小于某一阈值的若干个车辆划分为一组,但其研究目的在于通过将合流车辆分组,以降低合流顺序枚举寻优的计算复杂度,并未探讨编队对提高合流区通行能力的优势.
考虑到CAV编队合流可以有效提高合流区通行能力,消除合流冲突,解决高交通需求条件下的合流问题,本文提出了基于编队的协同合流(platooning-based cooperative merging, PBCM)策略.在合流区上游匝道设置一定长度的编队区,首先根据编队区内的CAV状态,确定主路CAV编队方案,然后在无合流冲突情况下,计算匝道编队区内CAV车队和主路CAV车队最快通过合流点的时间,最后对主路和匝道CAV车队头车进行轨迹规划,实现基于车队的无缝式协同合流.
1 问题描述
高速公路合流区在高交通需求条件下,交通需求超过最大通行能力,极易造成拥堵和排队.受匝道合流车辆影响,合流区上游主路交通流波动严重且频繁,交通流极不稳定,通行效率极低.PBCM策略可以协调主路和匝道车辆的合流过程,消除合流冲突,提高通行能力和合流效率.图1为本研究的场景示意图,本文只考虑匝道车辆对主路最外侧车道交通流的影响,控制对象为进入匝道通信范围的CAV以及合流区上游主路CAV.CAV在道路不同区域的行驶形式不同;在分流区上游,主路CAV以车队的形式行驶,车队内部车头时距很小;经过分流区时,部分CAV从车队中分离;在分流区下游,以单车形式跟驰行驶,车头时距较大;而匝道CAV在未进入通信范围前,也以单车形式行驶,进入编队区后以车队形式行驶.
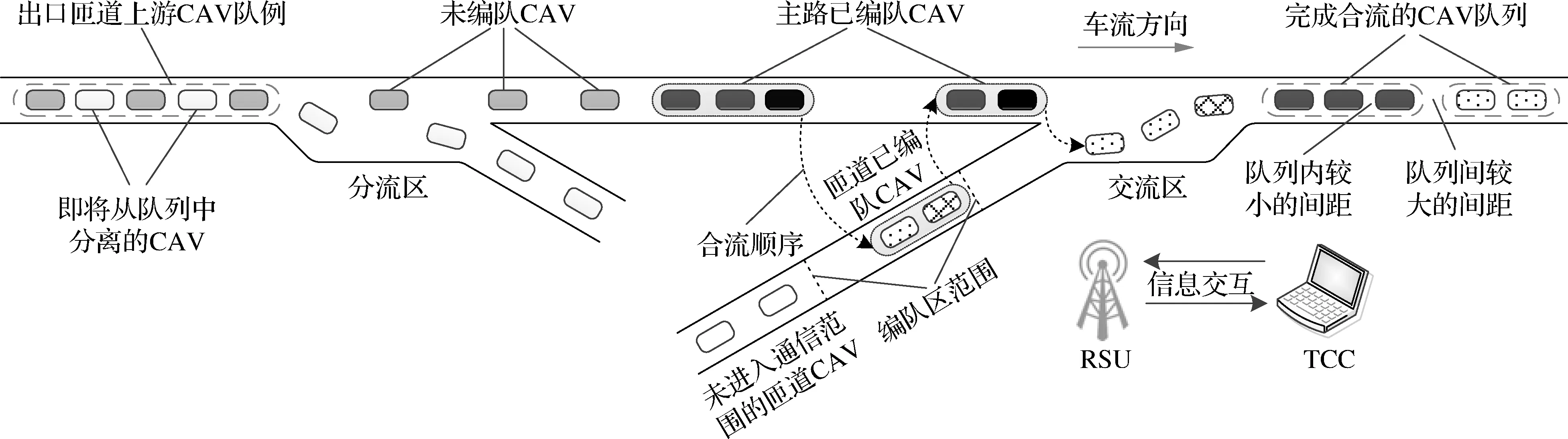
图1 基于CAV编队的协同合流场景
本研究中所有车辆均为CAV,即每辆车都是自动驾驶车辆,且都搭载了车载通信单元(OBU),可以实现车路通信.当CAV进入协同合流控制范围后,OBU可以将本车实时位置、速度等状态信息发送给路侧通信单元(RSU).控制中心(TCC)利用RSU收集到的主路和匝道车辆信息,计算合流时间和顺序,制定编队方案,进行车队头车的轨迹规划,然后通过RSU将控制信息发送到对应车辆,各CAV按照对应信息进行编队或执行轨迹规划.其中,充当车队头车的CAV收到的是本车需要执行的轨迹规划信息,具体包括通过合流点的时间和速度,以及从初始时刻到通过合流点全程的加速度信息;其他CAV收到的则是简单的编队指令.在编队及合流过程中,主路和匝道的车队头车需要按规划轨迹行驶,而车队内的跟驰车辆则只需以较小的车头时距紧跟前车.主路和匝道CAV以车队形式协同合流后,在合流区下游可以形成匀速行驶的稳定交通流.
2 理论分析
SVBCM策略是为了协调单个主路车辆与单个匝道车辆交替通过合流点,而PBCM策略则是协调主路和匝道车队交替通过合流点,当主路与匝道交通需求均较高时,2种策略合流过程的车辆时空轨迹示意分别如图2(a)和(b)所示.为避免合流冲突以及保证安全,匝道车辆在汇入主路前,主路车辆需要为其创造较大的合流间隙,同时匝道车辆需要与合流点下游主路车辆保持较大间距.在SVBCM策略的合流过程中,每辆匝道车辆都需要与合流点上下游相邻主路车辆保持较大的合流间距.而在PBCM策略中,匝道车辆和主路车辆是以车队形式保持较大合流间距进行合流,合流过程中车队内的车头间距较小.图2中,th为匝道车辆合流过程中与主路车辆之间的最小安全车头时距;tp为CAV以车队形式行驶时的最小头车时距(th>tp).因此,同样通过3辆匝道车辆和3辆主路车辆,PBCM策略耗时比SVBCM策略少Δtsp,合流效率更高.
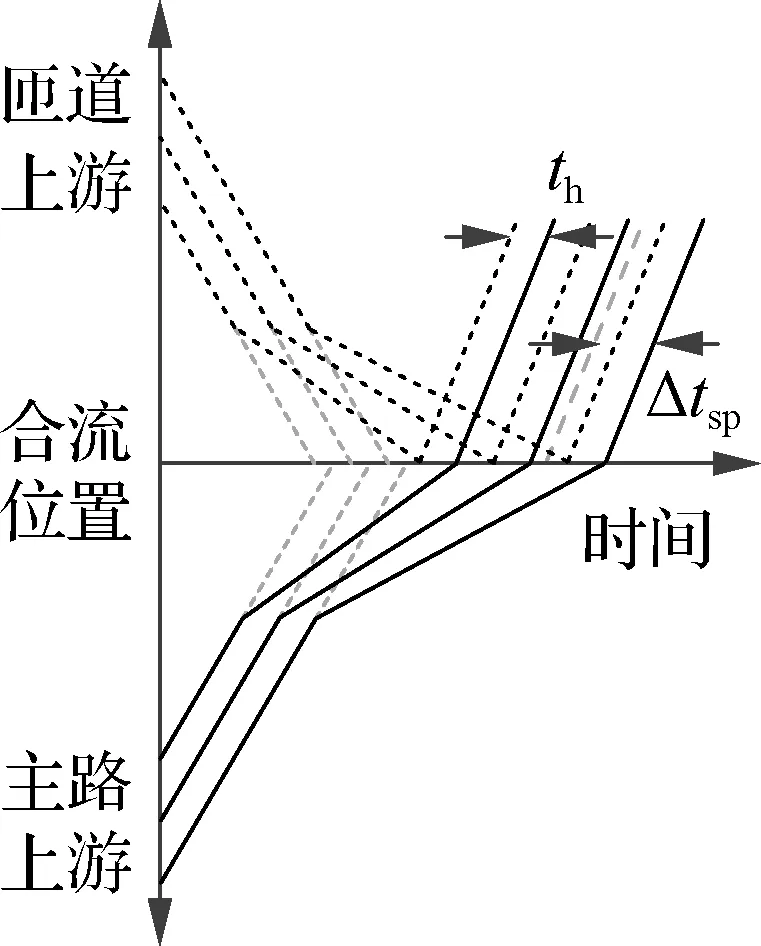
(a)SVBCM策略
假设在主路与匝道交通需求均较高的情况下,主路和匝道车辆编队规模均为np.SVBCM策略与PBCM策略下的合流区理论通行能力分别为
(1)
(2)
式中,Cs为SVBCM策略理论通行能力;Cp为PBCM策略理论通行能力.
由式(2)可知,影响PBCM策略通行能力的因素包含最小安全合流车头时距th、车队内部车头时距tp和编队规模np.th和tp越小,np越大,越有助于提高PBCM策略的通行能力.其中th和tp一般取决于CAV通信和自动控制等技术的水平,CAV相关技术越成熟,较小的th和tp就可以保证安全.假设th=2 s,tp=1 s,np=3,则Cs=1 800 辆/(h·车道),Cp=2 700 辆/(h·车道).PBCM策略的通行能力是SVBCM策略的1.5倍.假设传统无协同控制的合流区通行能力为0.8Cs,则PBCM策略控制的合流区通行能力是传统无协同控制通行能力的1.9倍.如此高的通行能力可以有效解决高交通需求时的合流拥堵问题.
3 模型构建和算法设计
本研究中,PBCM策略的执行是由位于匝道编队区的CAV满足一定条件触发的,即当进入编队区的CAV车辆数量达到np或小于np但编队区内第1辆未编队CAV即将驶出编队区,则执行PBCM策略.
3.1 基于FIFO规则的初始合流时间计算
主路未编队CAV和匝道编队区内CAV在满足限速和加速度约束的条件下,最快可能到达合流点的速度(v)轨迹如图3所示.图中,tm0为和tr0分别为主路车辆和匝道车辆最快通过合流点的时间;vM和vR分别为主路限速和匝道限速;vm0和vr0分别为主路和匝道车辆初始速度;vmp为合流速度.
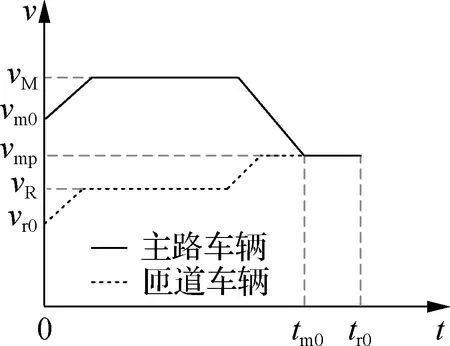
图3 主路和匝道车辆最快到达合流点的速度轨迹
由此可计算出进入主路通信范围内未编队车辆和编队区内未编队车辆最快到达合流点所需时间分别为
(3)
(4)
式中,vm、lm和tm分别为进入主路通信范围内未编队车辆的初始速度、初始位置到合流点的距离以及最快到达合流点所需时间;amax和dmax分别为车辆最大加速度和最大减速度;vr、lr和tr分别为匝道编队区内未编队车辆的初始速度、初始位置到合流点的距离以及最快到达合流点所需时间;lm为加速起点到合流点的距离.
利用式(3)可得到进入主路通信范围内所有未编队车辆最快通过合流点的时间tM.同理,利用式(4)可得到匝道编队区内所有未编队车辆最早的合流时间.
3.2 编队方案制定和合流时间规划
将编队区所有CAV编为一队,其中第1辆CAV指定为匝道车队头车.用trN表示编队区内最后一辆CAV初始合流时间,基于主路优先的原则,将tM中首个大于trN的元素所对应的车辆,确定为匝道车队创造合流间隙的车辆(gap vehicle, GV),将tM中所有小于trN的Npm辆主路车辆编为一队,并将上一轮编队确定的GV作为主路车队头车.
上一轮编队确定的主路GV规划通过合流点的时间为Tlm,主路车队内CAV通过合流点的时间间隔均为tp,可以得到主路车队尾车通过合流点的时间为
(5)

主路车队尾车通过合流点后,匝道车队头车将跟随其通过,时间间隔为th,因此规划匝道车队头车通过合流点的时间为
(6)
式中,TRPL为匝道车队头车规划合流时间.
Npr为触发编队时编队区内匝道车辆数量,则匝道车队中的跟驰车辆数量为Npr-1,匝道车队内CAV通过合流点的时间间隔均为tp,可以得到匝道车队尾车通过合流点的时间为
(7)

匝道车队尾车通过合流点后,本次编队确定的主路GV将跟随其通过,时间间隔为th,因此规划GV通过合流点的时间为
(8)

3.3 车队形成和轨迹规划
编队方案及合流时间确定后,即可执行编队和进行轨迹规划.主路GV和匝道车队头车轨迹规划过程以及主路车队中头车之后的跟驰车辆(简称主路跟驰车辆)和匝道车队中头车之后跟驰车辆(简称匝道跟驰车辆)各自的编队过程示意图如图4所示.图中,T0为轨迹规划初始时刻;Tr1和Tr2分别为轨迹规划中匀减速过渡到匀速的时刻和匀速过渡到匀加速的时刻;Trp为匝道完成编队的时间;Tmp为主路完成编队的时间;vrmin为匝道车辆轨迹规划中匀速行驶过程的速度.
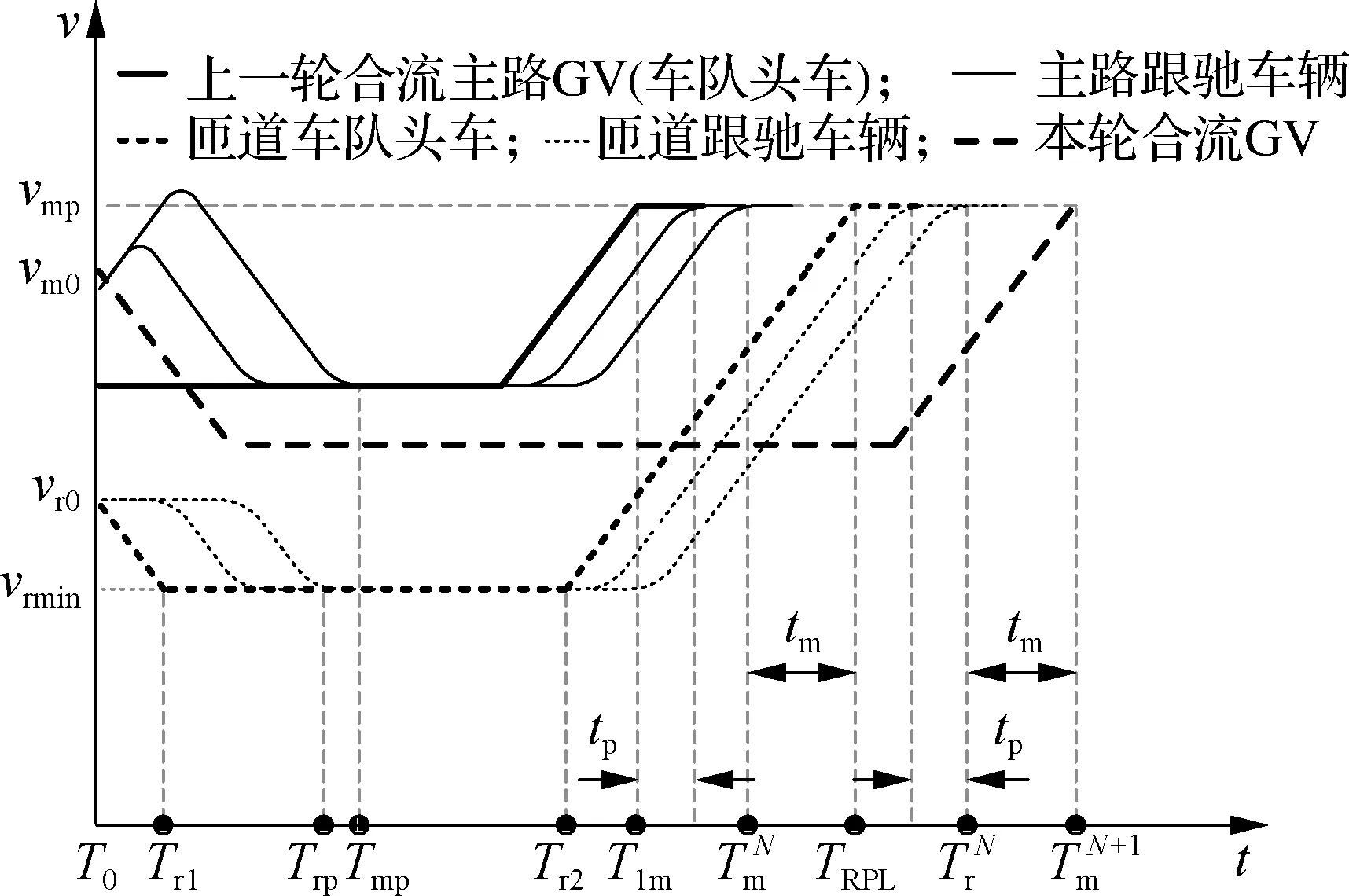
图4 编队和轨迹规划过程速度轨迹示意图
编队过程一般是由前向后逐一与前车编队,逐渐形成完整车队.在编队之前,主路跟驰车辆与各自前车之间的初始头车时距均较大,为形成紧密车队,将各主路跟驰车辆的期望车头时距重置为tp,即
te=tp
(9)
式中,te为期望车头时距.
重置期望车头时距后,主路跟驰车辆将继续以特定的跟驰规则行驶,一般的跟驰模型形式为
a(t+Δt)=f(vhost(t),vlead(t),Δx(t),te)
(10)
式中,t为当前时刻;Δt为时间步长;a(t+Δt)为下一个时间步长的加速度;vhost(t)和vlead(t)分别为当前时刻本车和前车速度;Δx(t)为当前时刻本车与前车的间距.
为保证编队过程的舒适性,加速度和减速度不超过舒适加速度和舒适减速度,即
dcom≤a(t+Δt)≤acom
(11)
式中,acom和dcom分别为舒适加速度和舒适减速度.
期望车头时距减小后,主路跟驰车辆开始与前车编队,编队过程中会先出现一个短暂的加速过程,然后再逐渐减速,最后达到与前车相同的速度,同时与前车的车头时距也稳定为tp.当车队尾车与前车编队完成后,即形成一个所有车辆具有相同速度和相同车头时距的稳定车队.主路完成编队后,即以车队形式行驶.
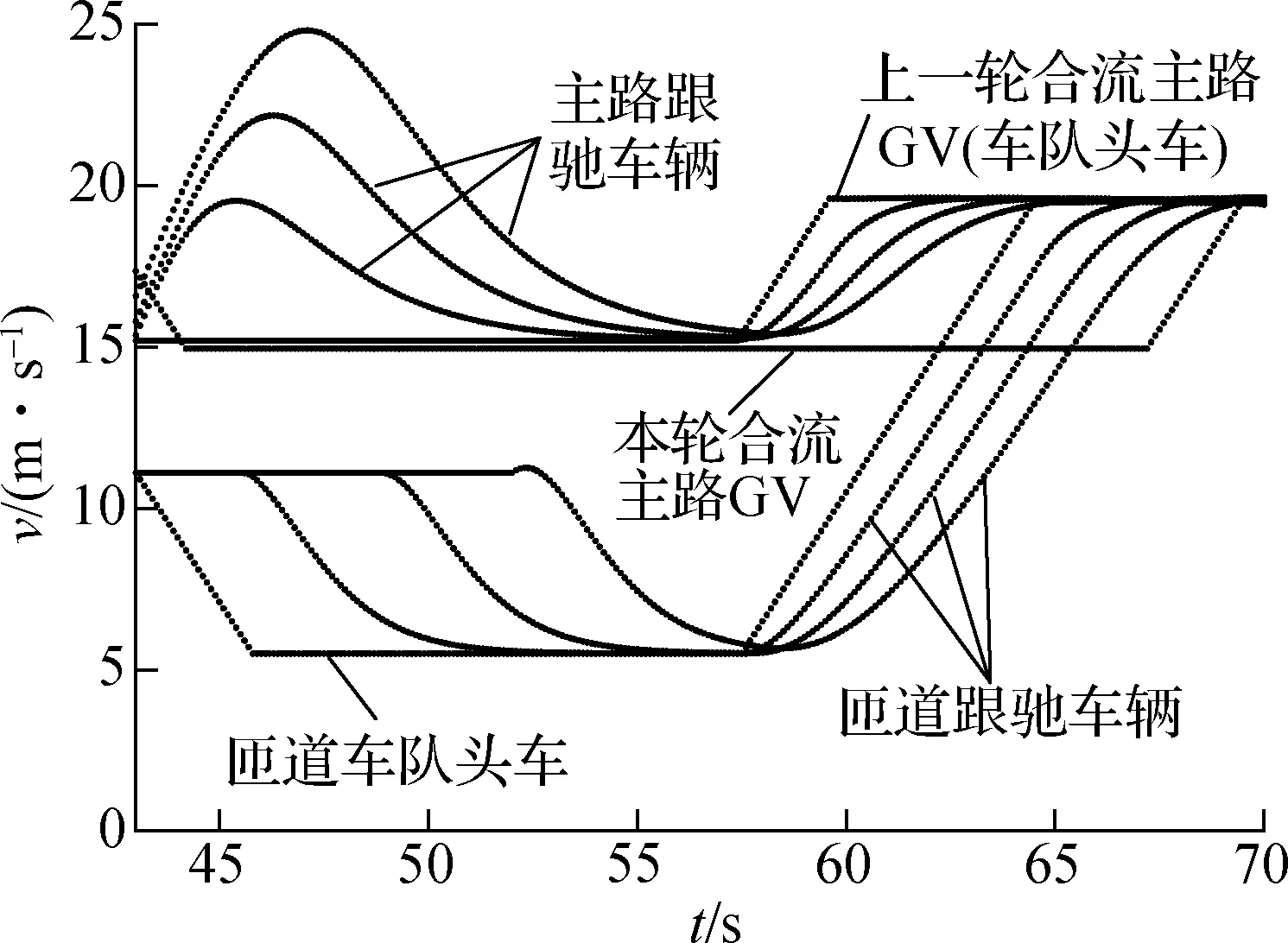
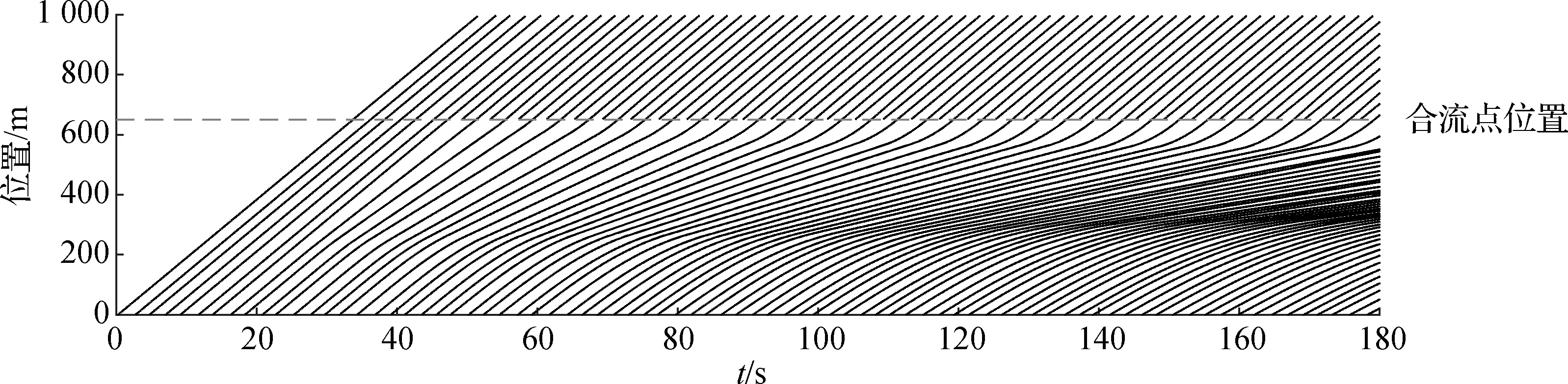
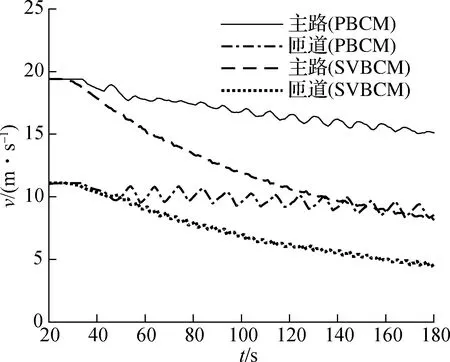
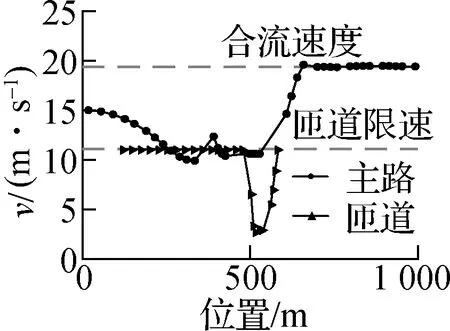
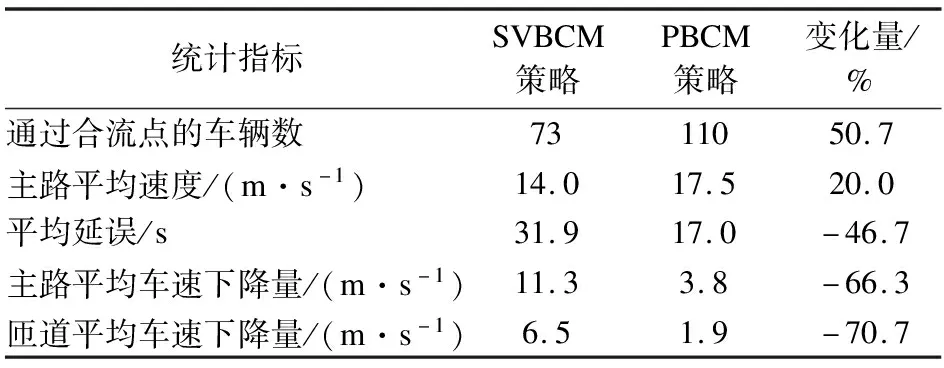
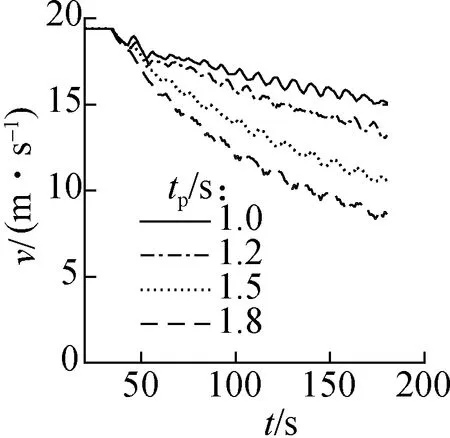
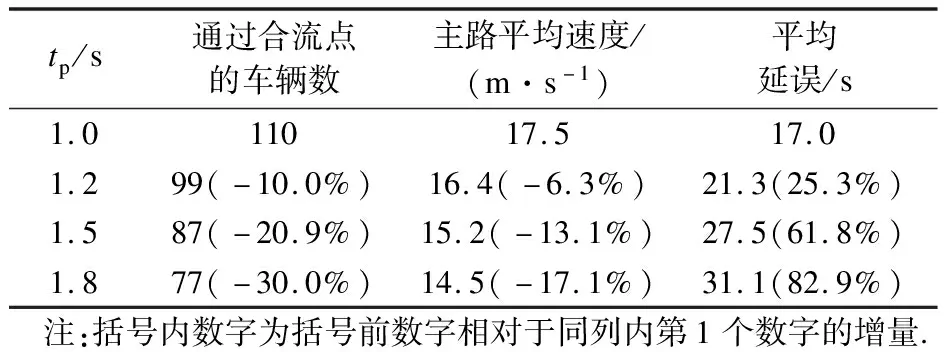
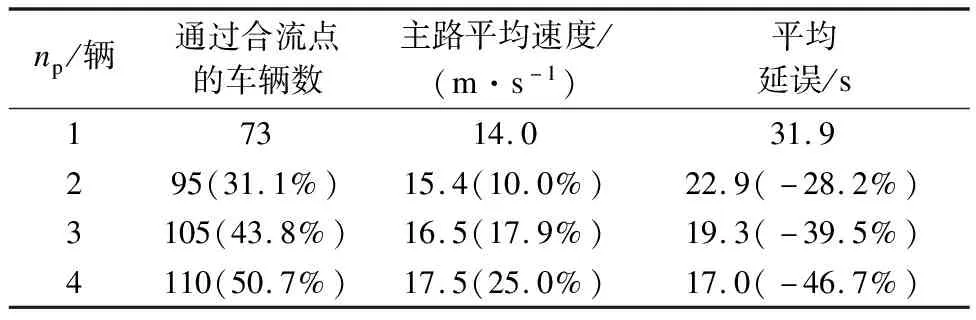
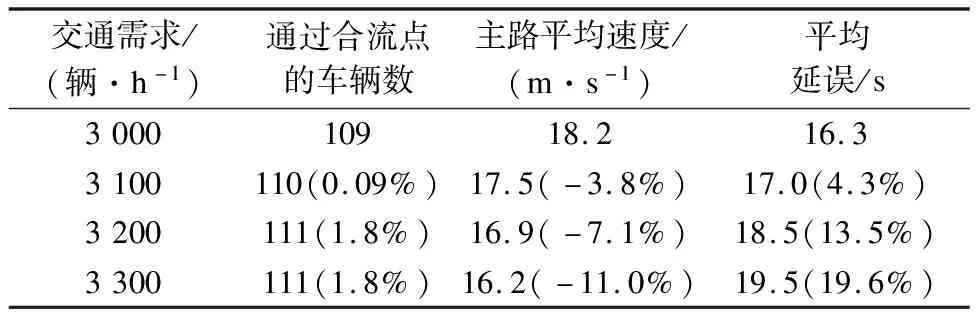
匝道跟驰车辆的编队原理与主路相同.图4中假设vr0=vR, 即匝道车队头车及匝道跟驰车辆初始速度等于匝道限速,匝道跟驰车辆编队过程为先匀速行驶一段时间后,然后再逐渐减速,最后达到与前车相同的速度.但当vr0 协同合流过程中,执行轨迹规划的车辆为匝道车队头车和主路GV,轨迹规划示意如图4所示,规划的时间范围为初始时刻T0到通过合流点的时刻.本研究将轨迹规划过程简化为匀减速—匀速—匀加速3个阶段,其中匀减速和匀加速过程的减速度和加速度分别为舒适减速度和舒适加速度.以匝道车队头车轨迹规划为例,初始时刻和合流时刻分别为T0和TRPL,初速度和合流速度分别为vr0和vmp,减速和加速过程的减速度和加速度分别为dcom和acom.现需要求得规划轨迹中由匀减速过渡到匀速的时刻Tr1和由匀速过渡到匀加速的时刻Tr2,以及匀速行驶过程的速度vrmin. 根据减速、匀速和加速过程行驶的距离以及减速和加速过程的时间可得 (12) (13) (14) 式中,x*为合流点位置;x0为轨迹规划车辆的初始位置. 式(13)与(14)相加可得 (15) 将式(15)代入式(12)即可求得vrmin,然后将vrmin代入式(13)与(14)即可得到Tr1和Tr2. 为验证本研究提出的PBCM策略的有效性,利用MATLAB建立了仿真场景.仿真中的主路长度为1 000 m,匝道和加速车道长度分别为400和150 m.将主路上游起点位置设置为坐标原点,加速车道起点和合流点分别位于坐标原点下游500和650 m处.编队区长度为100 m,范围为加速车道起点上游100 m.主路通信范围为坐标原点下游650 m,匝道通信范围为合流点上游250 m.主路限速和匝道限速分别为vM=90 km/h和vR=40 km/h.车辆最大加速度和最大减速度分别为amax=4 m/s2和dmax=-4 m/s2,最大舒适加速度和最大舒适减速度分别为acom=2 m/s2和dcom=2 m/s2.匝道车辆合流过程中与主路车辆之间的最小安全车头时距th=1 s,CAV以车队形式行驶时的最小头车时距tp=2 s,车辆编队规模均为np=4辆. 为模拟高交通需求场景,将主路和匝道车辆的生成时间间隔分别设置为1.9~2.6 s和2.0~2.8 s,并将此作为车辆初始期望车头时距,这样设置等效于主路和匝道交通需求分别为1 600和1 500 辆/h.主路和匝道车辆生成的初始位置为各自车道的上游端点,初始速度分别为70和40 km/h,下游合流速度vmp=70 km/h.仿真中的车辆跟驰模型采用IDM模型[16],仿真时间步长为0.1 s,仿真时长3 min. 4.2.1 基于PBCM策略的仿真结果分析 根据4.1节中的参数设置对PBCM策略进行仿真,得到基于PBCM策略的协同合流过程中主路车辆和匝道车辆的时空轨迹,如图5所示.图5(a)中仿真前期生成的前几辆主路车辆由于不会与匝道车辆发生冲突,因此没有编队和轨迹规划. (a)主路车辆及合流后的匝道车辆时空轨迹 由图5(a)和(b)可以直观地看出,在PBCM策略以车队为单位的协同合流模式中,每次的合流任务都是通过匝道车队与主路车队交替通过合流点的方式完成的.在未开始编队和轨迹规划之前,主路及匝道车辆均以较大的车头间距跟驰前车行驶.编队和轨迹规划开始后,主路跟驰车辆与车队头车逐渐减小间距,最后形成具有较小车头间距的车队,此后,主路跟驰车辆紧跟车队头车行驶.作为主路车队头车的GV则根据轨迹规划算法,为匝道车队创造合流间隙.GV通过合流点后,轨迹规划结束,此后以较大车头间距跟驰已汇入主路的匝道车队尾车行驶.匝道车辆的编队以及匝道车队头车轨迹规划执行过程与主路基本相同.主路车队和匝道车队通过合流点后,合流任务完成,在合流点下游的主路形成了高速行驶的稳定交通流. 图6为仿真实验的第3次协同合流过程中,主路和匝道车辆的编队和轨迹规划过程的速度曲线.执行轨迹规划和编队任务同步开始,编队任务一般在轨迹规划过程中即可完成,结束时间更早.图中主路车队头车和GV分别为上次和本次协同合流中为相应匝道车队创造间隙的轨迹规划车辆. 图6 编队和轨迹规划过程速度曲线 由图6可以看出,主路跟驰车辆与主路车队头车编队过程的速度变化为加速—减速—匀速.由于编队任务开始后,主路跟驰车辆期望车头时距减小,编队前期会出现一段加速过程,然后逐渐减速,达到与主路车队头车相同的速度后,编队完成.前2辆匝道跟驰车辆与匝道车队头车编队过程的速度变化为匀速—减速—匀速, 由于匝道限速,编队前期以匝道限速匀速行驶,然后逐渐减速,达到与匝道车队头车相同的速度后,编队完成.而第3辆匝道跟驰车辆编队过程的速度变化为匀速—加速—减速—匀速,出现的加速过程是因为从匝道进入加速车道后,解除了匝道限速,出现了短暂的加速过程. 由图5和图6可以看出,一次协同合流结束后,所有合流车辆均在主路达到相同的速度.基于PBCM策略的合流过程平滑稳定无冲突,合流车辆不会造成主路车辆的二次减速或交通流波动. 4.2.2 基于SVBCM策略的仿真结果分析 本节利用相同的参数对SVBCM策略进行仿真,并与PBCM策略进行对比分析.图7为基于SVBCM策略协同合流过程中主路车辆和匝道车辆的时空轨迹. 由图7可以看出, SVBCM策略也可实现匝道车辆与主路车辆无冲突的合流,最终在合流点下游的主路形成稳定高速的交通流.但由于单辆匝道车辆与单辆主路车辆交替通过合流点的方式需要较大的安全合流车头时距,与PBCM策略相比,SVBCM策略对提高合流区通行能力效果有限,无法有效应对高交通需条件下的合流问题. (a)主路车辆及合流后的匝道车辆时空轨迹 图8为2种合流策略仿真过程中主路和匝道各自的平均车速曲线. 图8 2种合流策略仿真过程主路和匝道平均车速 由图8可以看出,SVBCM策略的主路和匝道车速大幅度下降且下降很快,但PBCM策略的主路平均车速一直可以维持较高水平,主路和匝道车速虽也存在一定的下降趋势,但减小的幅度较小且下降过程缓慢. 图9为2种合流策略仿真结束后道路上所有车辆的速度曲线. 由图9可以看出,PBCM策略的车速总体上明显高于SVBCM策略.2种合流策略主路和匝道上的车速均为两端高、中部低的形态.其中,主路右端为合流区下游,匝道右端为加速车道,2部分的车速均较高.主路和匝道的中部为轨迹规划过程中车辆减速及以较低速度匀速行驶区域,车速较低.而在主路和匝道左端车辆的行驶速度中,受下游正在执行轨迹规划车辆的影响,SVBCM策略存在明显逐渐降低的趋势,而PBCM策略中,则可以维持较高的速度. (a)PBCM策略 本文选取5个指标对2种合流策略的性能进行比较,如表2所示. 表2 2种协同合流策略性能指标比较 由表2可知,与SVBCM策略相比,PBCM策略通过合流点的车辆数和主路平均速度分别增加了50.7%和20.0%,平均延误减少了46.7%.PBCM策略对于提高合流区通行能力和减少车辆延误效果显著.对于仿真过程的主路和匝道平均车速下降量2个指标,SVBCM策略分别为11.3和6.5 m/s,而PBCM策略中,主路和匝道平均车速仅分别降低了3.8和1.9 m/s,下降量很小.这说明PBCM策略可以有效维持高交通需求条件下主路和匝道较高的行驶速度,合流过程对主路交通流影响较小. 4.2.3 敏感性分析 本文对PBCM策略中的编队车头时距tp和编队规模np,以及不同交通需求对合流性能的影响进行了敏感性分析. 为分析PBCM策略中编队车头时距tp对合流性能的影响,进行了4次仿真实验.仿真中,将编队规模均设置为4辆,交通需求均设置为3 100辆/h,th设置为2 s,tp分别设置为1.0、1.2、1.5和1.8 s. 图10为4次仿真实验过程中主路和匝道平均车速变化.由图可见,4次仿真实验中的主路和匝道平均车速均呈现逐渐降低的趋势,降低程度又随着tp的增大而增大,其中tp=1.0 s时的平均车速降低程度最小,tp=1.8 s时的最大. (a)主路 4次仿真实验的PBCM策略性能指标如表3所示.由表可知,随着tp的增大,通过合流点的车辆数和主路平均速度均逐渐减小,平均延误逐渐增大.其中,tp=1.8 s时的平均延误相对于tp=1.0 s时增加高达82.9%. 表3 不同tp下PBCM策略性能指标 产生图10和表3结果的原因是在高交通需求条件下,交通需求超过了合流区通行能力,车辆通过合流点过程的速度必然会降低,进而产生延误.而随着tp的增大,基于PBCM策略的合流区通行能力逐渐降低,相同时间内通过合流点的车辆数相应减少,对应的车辆行驶速度会逐渐降低,延误也会逐渐增加. 为分析PBCM策略中编队规模np对合流性能的影响,进行了4次仿真实验.仿真中,将tp均设置为1.0 s,th设置为2 s,交通需求均设置为 3 100 辆/h,编队规模分别设置为1、2、3、4辆.4次仿真实验的PBCM策略性能指标如表4所示. 表4 不同np下PBCM策略性能指标 由表4可以看出,随着np的增大,通过合流点的车辆数和主路平均速度均逐渐增大,平均延误逐渐减小.其中,np=4时通过合流点的车辆数相对于np=1辆时增加了超过50%. 为分析不同交通需求下PBCM策略的合流性能,进行了4次仿真实验.仿真中,将tp均设置为1.0 s,th设置为2 s,编队规模设置为4辆,交通需求均分别设置为3 000、3 100、3 200、3 300 辆/h.4次仿真实验的PBCM策略性能指标如表5所示. 表5 不同交通需求下PBCM策略性能指标 由表5可以看出,随着np的增大,通过合流点的车辆数变化较小,而主路平均速度的减小幅度和平均延误增加的幅度变化较大.这是因为在tp、th和np固定的情况下,基于PBCM策略的合流通行能力固定,当交通需求超过这一通行能力后,在相同的时间内,可以通过合流点的车辆数基本相同,而交通需求超过通行能力越多,则意味着行驶速度更小和延误更大. 1)提出了基于CAV编队的协同合流策略,将若干辆即将通过合流点的主路CAV和匝道CAV分别编为一个车队,然后协调车队有序地交替通过合流点,消除合流冲突,同时CAV车队内部较小的车头时距有助于提高通行能力. 2)仿真案例表明,PBCM策略可以维持合流区上游较高的行驶速度以及匝道车辆较高的汇入率,同时可以在合流区下游形成稳定的交通流.在相同的高交通需求条件下,与SVBCM策略相比,PBCM策略的流量和主路平均速度最大分别增加50.7%和20.0%,而平均延误则最大减少46.7%. 3)PBCM策略对于解决高交通需求条件下的合流拥堵问题效果明显.在未来的智慧高速公路中,具有广阔的应用前景.该策略对城市快速路的协同合流控制也具有参考价值.未来将进一步研究CAV与传统车辆共存的场景,同时考虑CAV执行轨迹规划过程的不确定性等问题.4 仿真验证
4.1 仿真案例
4.2 结果分析
5 结论
猜你喜欢
人类工效学(2021年5期)2022-01-15 05:06:30
晚晴(2020年8期)2020-12-03 13:49:57
装备维修技术(2020年3期)2020-11-20 23:23:56
实用临床护理学杂志(电子版)(2020年28期)2020-07-14 05:04:06
绥化学院学报(2019年10期)2019-10-12 01:08:12
心理科学进展(2018年8期)2018-02-21 18:32:04
家庭用药(2017年2期)2017-03-14 15:50:09
Theoretical & Applied Mechanics Letters(2016年6期)2017-01-06 08:47:00
心理科学进展(2015年5期)2015-02-26 07:07:54
城市道桥与防洪(2014年2期)2014-02-27 07:24:52