具有时变参考输入的多自主体系统的平均一致性跟踪
2022-02-26 06:58刘成林
计算机应用 2022年1期
张 雨,刘成林
(轻工过程先进控制教育部重点实验室(江南大学),江苏无锡 214122)
0 引言
近些年来,多自主体系统的分布式协调控制引起了众多学者的研究兴趣,并得到了广泛的应用,如:多机器协调控制[1]、无人机编队控制[2]、传感器同步[3]等。
一致性问题[4]是多自主体系统控制中的基本问题,得到了深入的研究,并取得了广泛的研究成果。自主体通过彼此协调合作进行信息传输,根据控制协议改变自身的状态,从而使得自主体的状态值趋向于一致。此外,如果一致性的值为自主体初始状态的平均值,则称之为平均一致性问题[5]。本文研究平均一致性跟踪问题:在控制协议约束下,每个自主体通过和相邻自主体进行信息传输最终收敛到参考输入的平均值[6]。Liu 等[7]将干扰观测器引入算法来抵消外部干扰,并用矩阵分析法得到固定拓扑结构下自主体跟踪参考输入平均值的一致性收敛条件。郑敏等[8]分析了自主体间存在时延的一致性问题,运用Routh 判据和Nyquist 判据得到强连通拓扑下的平均一致性跟踪的条件。为了研究多自主体系统跟踪时变参考输入信号的平均值,Chen 等[9]提出了具有时变参考输入的三阶多自主体系统的一致性算法,分析出多自主体系统任意初始条件下追踪参考输入平均值的误差大小。Kia 等[10]设计了连续时间的动态平均一致性算法,运用矩阵论方法得出了时变拓扑结构下自主体跟踪时变参考输入平均值的误差上界。Chen 等[11]研究了分布式不连续控制算法,采用非平滑分析和稳定性分析给出了自主体在有限时间内跟踪时变参考输入的平均值。基于内部模型原则,Bai等[12]考察了动态平均一致性跟踪算法,给出了自主体跟踪时变参考输入平均值的充要条件。Moradian 等[13]运用矩阵分析和微分方程分析比例-积分一致性算法在相同通信时延约束下跟踪时变参考输入平均值的收敛条件,该收敛性与时延相关。
由于网络通信负载和带宽的限制,多自主体系统间的信息传输数据需要进行采样和量化[14]。Zhang 等[15]研究了基于均匀量化器的一阶多自主体系统的平均一致性跟踪问题,运用矩阵分析得出了多自主体系统跟踪定常参考输入平均值的充要条件。Ceragioli 等[16]和Yu 等[17]采用均匀量化器分别证明了一阶多自主体系统和混合阶多自主体系统实现平均一致性的收敛条件。Fang 等[18]提出了基于概率量化器的分布式控制算法,得到了在均方意义下多自主体系统状态收敛到初始状态的平均值。基于对数量化器,Wu 等[19]通过设计控制增益和量化精度实现了系统的平均一致性跟踪。Liu等[20]和Bian 等[21]运用矩阵分析证明了多自主体系统的平均一致性。
本文考察了具有时变参考输入的多自主体系统的动态平均一致性跟踪问题。在已有的平均一致性跟踪算法基础上进行了改进,提出了一种新的比例-积分一致性算法,并分析了多自主体系统在强连通平衡拓扑结构下的一致性问题。利用Routh 判据和矩阵分析得到多自主体系统渐近收敛到参考输入平均值的条件。由于自主体间信息传输数据进行量化的必要性,运用同样方法得到了数据量化后多自主体系统的平均一致性跟踪条件。
1 预备知识
1.1 图论
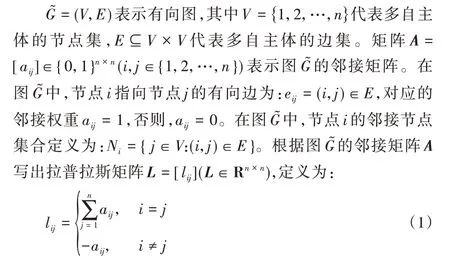
1.2 符号定义
R 代表实 数,b=(b1,b2,…,bn)T∈Rn×1代表n个变量bi,i∈V组成的列向量。In表示n阶单位矩阵。
对于离 散时间函数q:Z →Rn×1,定义:‖q‖∞=sup{‖q(k)‖,k∈Z} 。
在本文中,若无特殊说明,‖·‖等价于‖·‖2,代表二范数的值。
1.3 量化器
由于网络通信负载和带宽的限制,多自主体间的信息传输数据需要进行采样和量化。本文运用均匀量化器来量化信息传输数据[22],均匀量化器的量化函数定义如下:


1.4 重要引理
引理1[23]对于具有n个节点的有向平衡图G~,下述结论成立:
1)0 是L的一个特征值,和1n分别为L的左特征向量和右特征向量,满足:
2)对于连通的图G~,L有且仅有一个特征值为0。
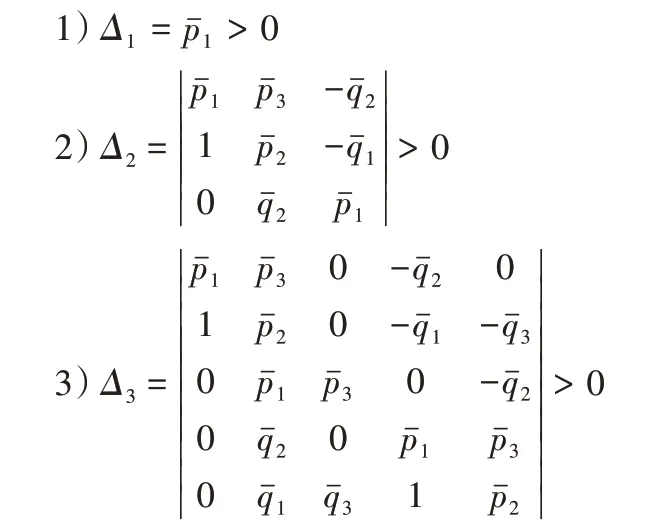
引理2[24]对于有复系数的三次方程:

的根位于左半平面内,当且仅当如下条件成立:
引理3[25]若矩阵D的特征值位于复平面的单位圆内,则D的范数满足如下性质:
其中:ω∈(0,1),τ>1。ω和τ的取值可以借助LMI 工具箱求出:(ω,τ,Q)在取最小值时得到,且:
DTHD-H≤
2 问题描述
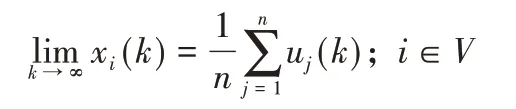
假定多自主体系统由n个自主体构成,自主体间都可以发送和接收信息。对于每个自主体,都可以存储信息和处理信息,并且可以接收到一个随时间变化的参考输入信号。本文研究的核心是设计一个分布式算法,使得每个自主体渐近跟踪参考输入信号的平均值。即:xi(k) ∈R(i∈V)为自主体i的状态,ui(k) ∈R(i∈V)为自主体i的参考输入信号,本文的目标是设计一个分布式算法,使得:
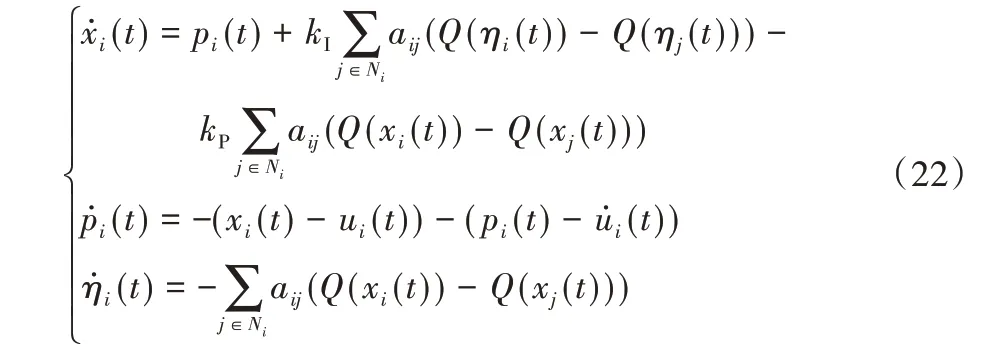
假定多自主体系统由n个自主体构成,为了解决多自主体系统的动态平均一致性跟踪问题,文献[9]中提出的分布式跟踪算法如下:

其 中:xi(t) ∈R 表示自主体i(i∈V) 的状态,pi(t) ∈R 和ηi(t) ∈R 表示自主体i(i∈V)的内部状态。
在文献[9]中自主体xi(t)的基础上,本文引进比例环节更好地跟踪参考输入信号的平均值,改进后的一致性跟踪算法如下:
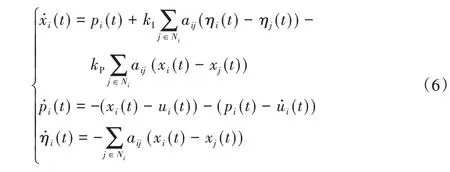
其中:kP和kI分别表示比例系数和积分系数。
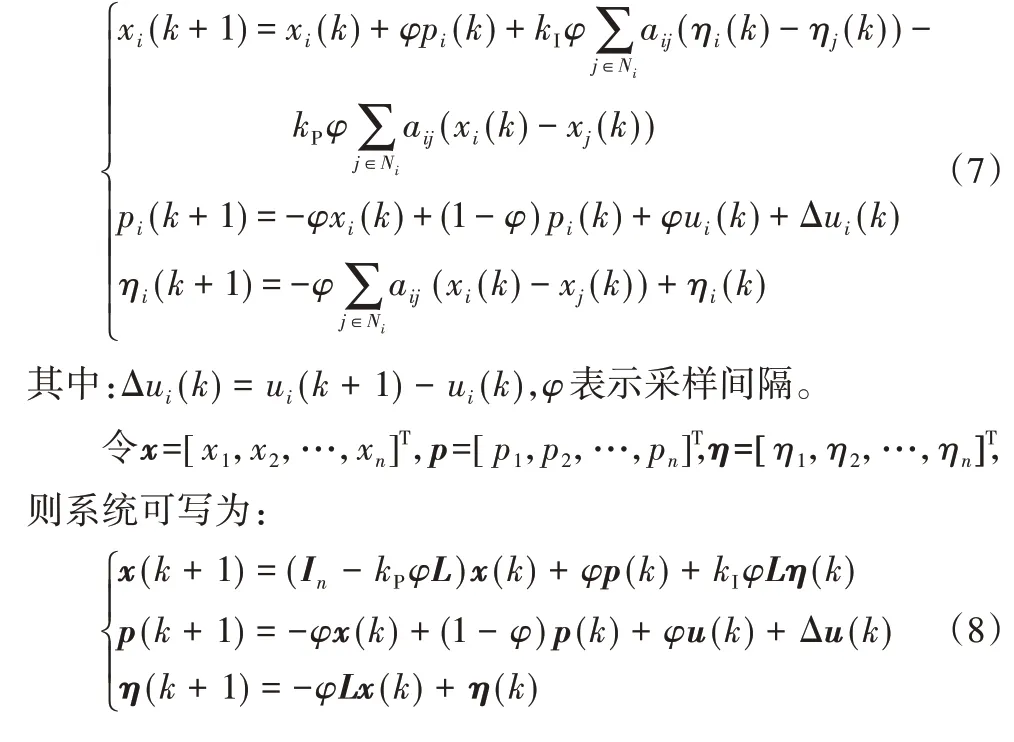
多自主体间进行数据通信时需要进行采样以减轻通信负载,将式(6)中的算法采用零阶保持器化为如下离散形式:
3 一致性分析
3.1 无量化情况
令自主体的跟踪误差为:

定理1假定多自主体系统式(7)的通信拓扑图是强连通平衡图,多自主体系统实现平均一致性跟踪,当且仅当下列条件成立:

ai和bi对应拉普拉斯矩阵L的第i个特征值λi的实部和虚部。同时,多自主体系统平均一致性跟踪误差的有界值为:

为考察采样间隔φ的范围,分析矩阵M特征值的分布情况。即:

式(13)可变换为:


其中:λi为拉普拉斯矩阵L的第i个特征值。
接下来,考察方程(16)的特征值的分布:
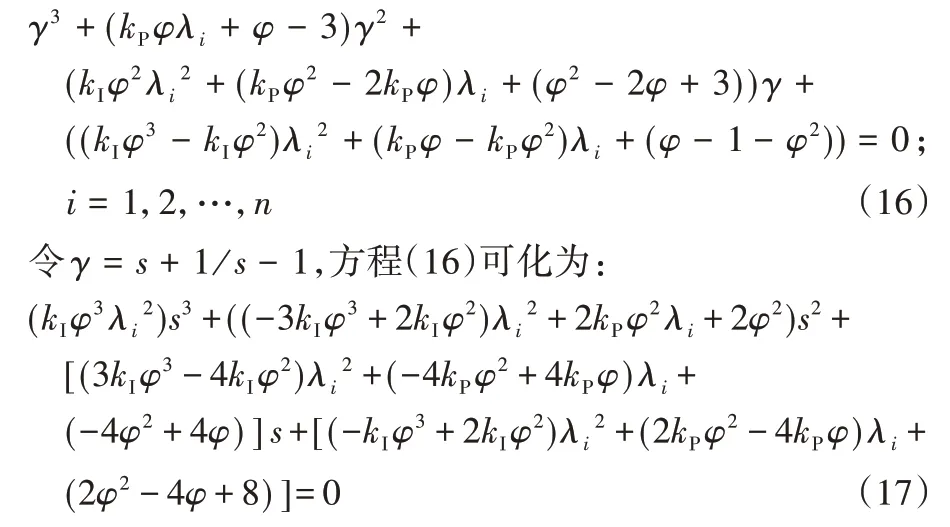
令λi=ai+i·bi(λi中的i表示第i个智能体,i·Im(·)中的i 表示虚数单位),其中:ai表示λi的实数部分,bi表示λi的虚数部分。可以得到:

其中:p1,i、q1,i、p2,i、q2,i、p3,i和q3,i的值在定理1 中已给出。
根据引理2 可知:满足定理1 中的条件1),2)和3)时,方程(17)的根位于左半平面。
因此,当且仅当定理1 中的条件1)、2)和3)都成立时,方程(17)的根位于左半平面。根据方程(16)和方程(17)的双线性变换可知:此时方程(16)的特征值位于复平面的单位圆内。
采样间隔φ满足定理1 中的条件时,矩阵M的特征值位于复平面的单位圆内。根据引理3 可知:‖M‖k≤τωk(τ和ω的取值在定理1 中给出)。
将方程(12)进行迭代可得:

利用范数的性质,可得式(20):

推论1 假定多自主体系统式(7)的通信拓扑图是无向连通图,多自主体系统实现平均一致性跟踪,当且仅当下列条件成立:


λi为拉普拉斯矩阵L的第i个特征值。同时,多自主体系统平均一致性跟踪误差的有界值为:

其中:ω和τ的取值在定理1中已给出。
3.2 量化情况
考虑到自主体间的信息传输数据进行量化的必要性,接下来研究式(6)在数据量化后的平均一致性跟踪问题:
自主体间信息传输数据需要进行采样,运用零阶保持器将式(22)中的算法化为如下离散形式:
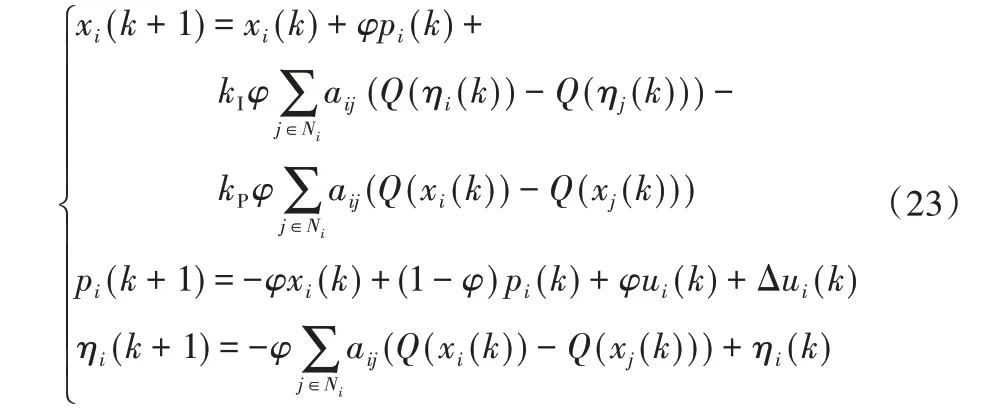
在式(23)的作用下,系统可写为:
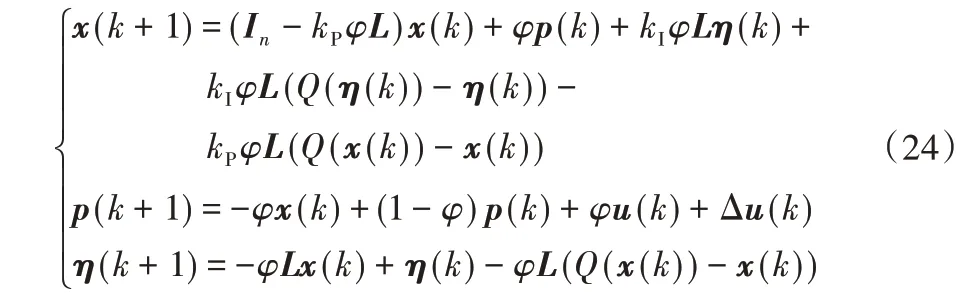
联立式(9)和式(24),得到:

式(25)用矩阵形式表示,得到:

定理2假定多自主体系统式(23)的通信拓扑图是强连通平衡图,多自主体系统实现平均一致性跟踪,当且仅当下列条件成立:

ai和bi对应拉普拉斯矩阵L的第i个特征值λi的实部和虚部。同时,多自主体系统平均一致性跟踪误差的有界值为:

根据定理1 中的分析可知:当采样间隔φ满足定理2 中的条件1),2)和3)时,矩阵M的特征值位于复平面的单位圆内。根据引理3 可知:‖M‖k≤τω(kτ和ω的取值在定理2 中已给出)。
将式(27)进行迭代可得:

推论2 假定多自主体系统式(23)的通信拓扑图是无向连通图,多自主体系统实现平均一致性跟踪,当且仅当下列条件成立:

λi为拉普拉斯矩阵L的第i个特征值。同时,多自主体系统平均一致性跟踪误差的有界值为:

其中:ω和τ的取值在定理2中已给出。
4 仿真结果
4.1 无量化情况
研究由4 个主体构成的多自主体系统式(7),其拓扑结构是强连通平衡图,如图1。在拓扑结构图中,邻接权重分别为:a12=1,a21=a23=1,a34=1,a42=1。计算可知,拉普拉斯矩阵L的特征值为:λ1=0,λ2=1,λ3=λ4=2。
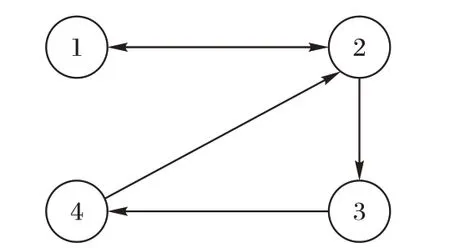
图1 四个自主体的连接拓扑Fig.1 Interconnection topology of four agents
自主体参考输入信号为:u1(k)=sin(0.1k),u2(k)=cos(0.2k),u3(k)=sin(0.15k),u4(k)=0.1k。
比例系数kP和积分系数kI选定为:kP=kI=1。初始值选定为:x(0)=p(0)=η(0)=[ 1 2 3 4 ]T。根据定理1 中的条件可得:采样间隔的临界值为φ=0.423 2 s。当φ=0.2 s,图2 和图3 展示了时变参考输入的有界平均一致性跟踪。当φ>0.423 2 s(φ=0.424 s)时,自主体无法实现有界平均一致性跟踪,如图4。

图2 φ=0.2 s时无量化的自主体状态轨迹Fig.2 State trajectories of agents without quantization when φ=0.2 s
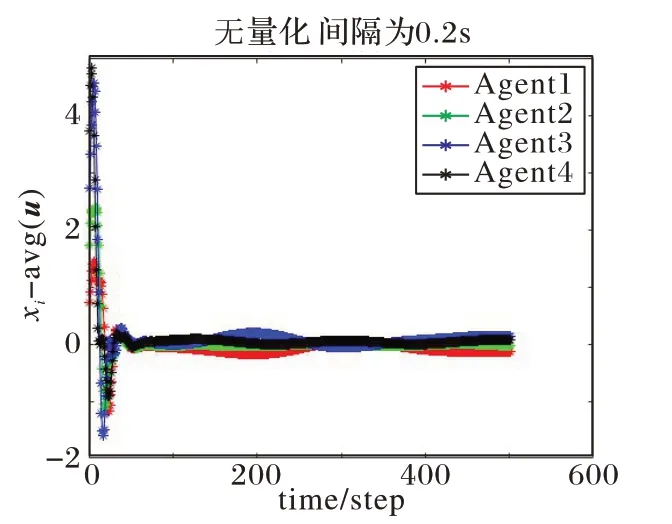
图3 φ=0.2 s时无量化的自主体状态误差Fig.3 State errors of agents without quantization when φ=0.2 s

图4 φ=0.424 s时无量化的自主体状态误差Fig.4 State errors of agents without quantization when φ=0.424 s
4.2 量化情况
研究均匀量化器下的多自主体系统式(23),选择和例1中同样的拓扑结构、邻接权重和采样间隔。选取量化间隔为δ=0.5。多自主体的初始条件和例1 中的相同,即:参考输入信号 为u1(k)=sin(0.1k),u2(k)=cos(0.2k),u3(k)=sin(0.15k),u4(k)=0.1k。比例系数kp和积分系数kI选定为:kp=kI=1。初始为x(0)=p(0)=η(0)=[ 1 2 3 4 ]T。根据定理2 中的条件可得:采样间隔的临界值为φ=0.423 2 s。当φ=0.2 s,图5 和图6 展示了时变参考输入的有界平均一致性跟踪。当φ>0.423 2 s(φ=0.424 s)时,自主体无法实现有界平均一致性跟踪,如图7。

图5 φ=0.2 s时量化的自主体状态轨迹Fig.5 State trajectories of agents with quantization when φ=0.2 s
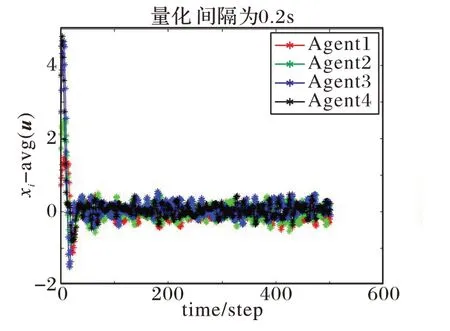
图6 φ=0.2 s时量化的自主体状态误差Fig.6 State errors of agents with quantization when φ=0.2 s
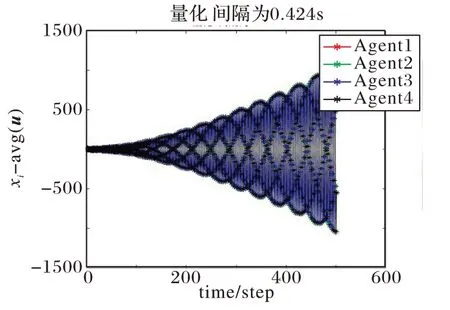
图7 φ=0.424 s时量化的自主体状态误差Fig.7 State errors of agents with quantization when φ=0.424 s
5 结语
对于具有时变参考输入的多自主体系统,本文研究了自主体跟踪参考输入信号平均值的一致性问题。本文在原有算法的基础上,提出了一种新的比例-积分一致性跟踪算法,采用矩阵分析和Routh 判据得到多自主体系统渐近跟踪参考输入平均值的充要条件,该条件与采样间隔和拉普拉斯矩阵特征值有关。由于自主体间通信数据进行量化的必要性,运用同样方法得到了数据量化后的多自主体系统的平均一致性跟踪条件,该条件与采样间隔和拉普拉斯矩阵特征值相关。在未来的研究工作中,考察采样周期是时变的情况,设计和分析控制算法,更具有实际应用价值。
猜你喜欢
计算机应用与软件(2021年7期)2021-07-16
新生代(2019年16期)2019-10-18
阅读与作文(英语初中版)(2019年11期)2019-09-10
软件(2017年9期)2018-03-02
新课程·下旬(2018年7期)2018-01-19
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
课程教育研究·新教师教学(2016年18期)2017-04-12
文理导航(2015年14期)2015-05-22
科技经济市场(2014年11期)2014-12-30