
多旋翼编队的分布式控制方法研究
2021-08-06 10:15李洪奎
沈阳理工大学学报 2021年2期
税 歆,李洪奎
(沈阳理工大学 自动化与电气工程学院,沈阳110159)
由于单架多旋翼的负载与续航有限,以及任务需求逐渐复杂化与多样化,通常使用数架搭载不同传感器或精密仪器的多旋翼协同合作完成指定任务[1]。任务进行过程中,需要根据异构多旋翼之间的工作分配,规划并保持稳定的多旋翼编队队形[2]。因此研究多旋翼编队的控制方法十分必要。
目前,最为常用的编队控制方法为领航-跟随者,该模式选定某一特殊个体作为长机,其他无人机作为僚机[3]。由于实际运行中存在时变干扰,且长机没有僚机的位置反馈,将导致时变干扰与系统误差之间存在积分效应,因此编队系统的稳定情况将完全取决于长机运行情况与实际环境的干扰强度。针对该问题有两种解决途径:一种是结合自适应理论设计编队控制器,并实现动态反馈[4];另一种是利用虚拟领航者来替代长机的功能,即虚拟领航者方法[5-6]。两种方法虽然都解决了上述问题,但前者仍然依赖长机的正常运行;而后者虽然不依赖某一特殊个体,但由于编队控制系统不存在反馈回路,依然无法抵抗时变干扰。
近年来,基于分布式的编队控制方法逐渐趋于成熟,分布式结构不存在中心化概念,而且个体间存在信息交互[7-9],该方法能有效解决领航-跟随者方法存在的固有缺陷。李文皓等[10]根据个体间的相对位置偏差将队型保持划分为四种状态,设计分布式保持策略算法,将散乱的无人机先组成小编队后再进一步互相靠近组成大的编队,最终实现队形保持。刘华罡等[11]结合一致性理论调整了分布式协调控制率,利用位置函数实现编队内不发生碰撞,同时规避环境中的障碍物。但在基于分布式结构的编队控制方法中,个体只能根据自身坐标系进行位置反馈值的计算,而个体间的传感器测量误差并不一致,这种计算方法会引入相对位置误差。
为解决上述问题,本文分析了已有的控制方法中所具备的优点;结合其优点,设计相应编队控制系统的整体框架,提出基于相同坐标系的多旋翼编队的分布式控制方法;最后,通过Matlab仿真软件验证本方法的可行性。
1 问题分析
1.1 模型描述
根据单架多旋翼的控制算法[12]可将编队中多旋翼个体抽象为一个具备控制参数的质点,个体之间的连接可抽象为两点之间的线段;若个体间通信为全双工方式,则该线段无方向,否则线段方向与通信方向相同。以四架多旋翼无人机组成的编队为例,按照该方法建立领航-跟随者的编队模型,如图1所示。
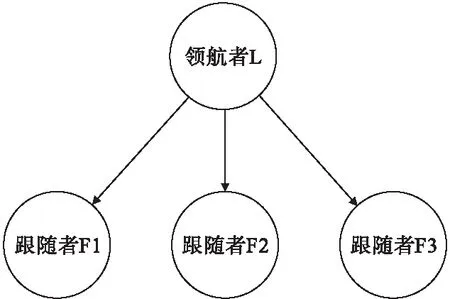
图1 领航-跟随者编队模型
按照侯天浩等[13]提出的多旋翼编队的通信方式,领航-跟随者方法属于完全集中式的组网方式。因此在编队飞行过程中,领航者L将自身参数下发到各个跟随者F中,各Follower按照预定队形修改该参数并进行飞行控制,从而达到队形保持的目的。在该编队模式中,所有个体的期望位置均处于相同的坐标系,因此避免了个体间差异所带来的测量误差。
图2为虚拟领航者V-L编队模型,其中V-L并不参与编队飞行,因此不存在依赖问题,但位置计算方式与领航-跟随者模式相同,因此各跟随者F依然处于同一参考坐标系。
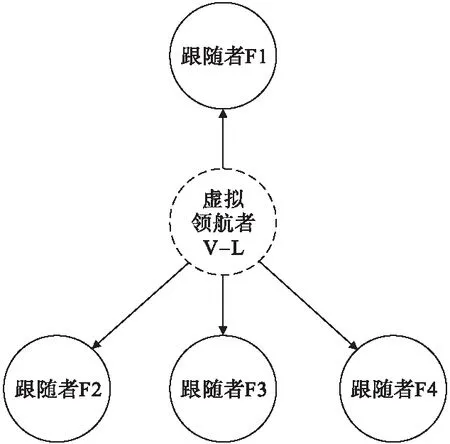
图2 虚拟领航者编队模型
图3中任意个体与编队中的一个或多个个体进行通信。如果任意个体间均存在通信链路(如图3a),可称为完全互通;否则称为不完全互通(如图3b);两者之间的区别为:完全互通的分布式结构中,所有个体的抗干扰能力完全相同。另外,根据图3也可以看出,在分布式模型中即使个体数量与队形相同,组网结构并不唯一,若无人机U1出现故障,无人机U2~U4依旧可以按照原定计划飞行。所以当编队中某一个体出现故障,通常其余个体能够继续协同执行任务。
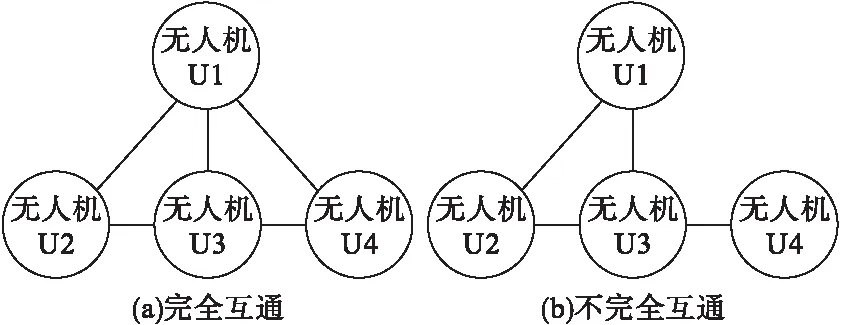
图3 分布式编队模型
1.2 误差分析
多旋翼的队形保持本质上是编队内的个体到达所指定的预期位置。因此,本节以两架多旋翼为例,分别说明领航-跟随者编队模型与分布式编队的水平位置计算方法。图4为领航者模型中,领航者L与跟随者F1的位置计算示意图。
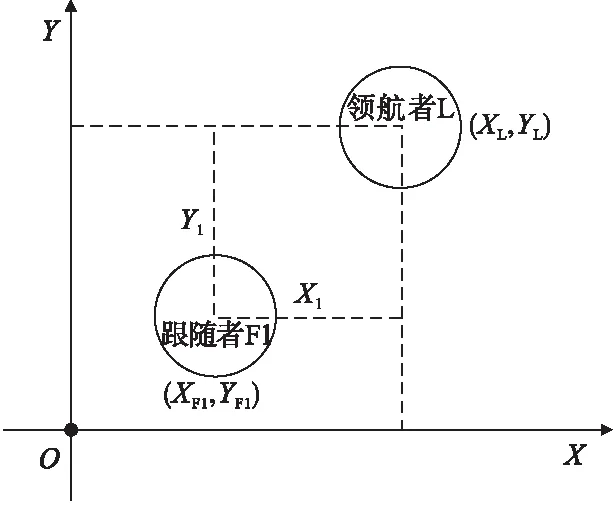
图4 领航者模型位置计算示意图
图4所示的领航者模型中,领航者L在地球坐标系OXY下的位置坐标为(XL,YL),根据预期队形,领航者L应与跟随者F1相距(X1,Y1)。所以跟随者F1位置坐标(XF1,YF1)计算式为
XF1=XL-X1YF1=YL-Y1
(1)
根据欧式距离可计算实际距离为
(2)
但由于传感器存在测量误差(Xe,Ye),此时跟随者F1实际位置是(XF1+Xe,YF1+Ye),为方便后续进行误差项的对比分析,距离P1的平方为
(3)
其中误差项Pe1为
(4)
在分布式模型中,位置信息不再由领航者L或者虚拟领航者V-L统一下发至跟随者F,而是无人机主动获取相邻个体的位置信息,进行坐标系转换后作为位置反馈,判断自身是否达到预期位置。图5为分布式模型位置计算示意图,O2X2Y2为个体U2的机体坐标系,U1在该坐标系下的位置为(ΔX21,ΔY21)时,编队达到预期队形。但实际进行数据交互时,U2只能获取到U1在地球坐标系OXY下的坐标(Xu1,Yu1)。所以若判断U2相对U1到达队形预期位置,应满足条件:
ΔX21=Xu1-Xu2ΔX21=Yu1-Yu2
(5)
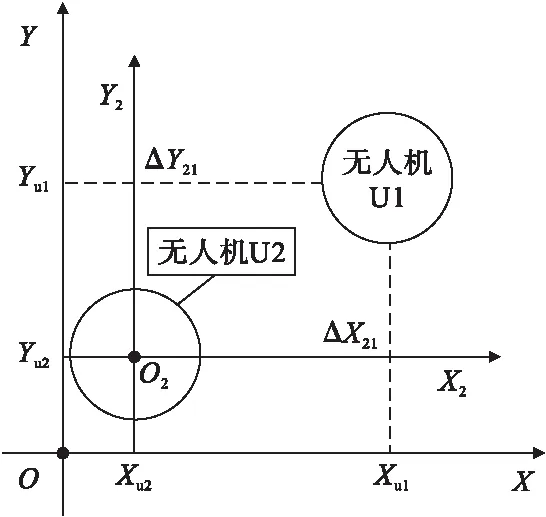
图5 分布式模型位置计算示意图
但所有多旋翼个体的传感器均存在测量误差,分别为(Xe1,Ye1)和(Xe2,Ye2),且假设个体的测量误差方向相反,此时误差最大。X方向的误差为|Xe1|+|Xe2|,Y方向为|Ye1|+|Ye2|。同样考虑欧式距离,P2的平方为
(6)
其中误差项Pe2为
Pe2=2ΔX21(|Xe1|+|Xe2|)+2ΔY(|Ye1|+|Ye2|)+(|Xe1|+|Xe2|)2+(|Ye1|+|Ye2|)2
(7)
假设所有传感器测量误差相同,即
E=Xe=Ye=Xe1=Ye1=Xe2=Ye2
(8)
且领航者方法与分布式方法保持同一队形,不考虑测量误差的理论值,则有如下关系
X=XF1=ΔX21Y=YF1=ΔY21
(9)
此时,式(4)与式(7)的误差项可化为
Pe1=2XE+2YE+2E2
(10)
(11)
通过公式(10)与公式(11)的对比,明显发现分布式模型的位置计算误差大于领航者模型。原因是计算时坐标系进行了二次转换,引入了额外误差,所以最终队形的计算误差增大。针对该问题,本文结合虚拟领航者模型的优点,在分布式模型中引入虚拟领航者,对坐标系进行统一,减少编队飞行的误差。该误差推导也可用于三维空间中,只需要对应加入垂直方向的位置与误差。
2 编队控制算法
2.1 编队模型
以四架多旋翼进行编队为例,设计相同坐标系的分布式编队结构,如图6所示。
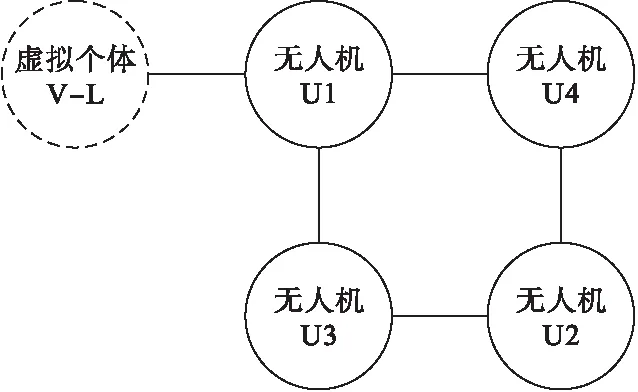
图6 相同参考坐标系的分布式编队示意图
图6中U1至U4为实际存在的个体;V-L为虚拟个体,该个体在进行队形保持时位置不发生改变,而是作为将参考坐标系进行统一的介质。任务执行过程中,通过移动参照系的位置(即V-L的位置)实现编队飞行。
可将分布式模型转换为邻接矩阵形式。其中设N=1,2,…,n是有限且非空的节点集合,所以E∈N×N称为边的集合。其中每个节点代表一个多旋翼个体,节点i与节点j允许信息流通,则边(i,j)存在,此时邻接矩阵AVL相应元素的值为aij=aji=1;若信息无法流通,元素值为aij=aji=0。另外,在邻接矩阵AVL中,定义对角线元素aii=0。为表示方便,将VL默认为末位个体,图7为分布式队形控制系统示意图。

图7 分布式队形控制系统示意图
图7所示的模型对应的扩展邻接矩阵AVL为
(12)
若只考虑实际个体,其邻接矩阵A为

(13)
根据邻接矩阵可以计算连接图的拉普拉斯矩阵
L=[lij]=D-A
(14)
其中度量矩阵D=[dij],dij的算式为
(15)
2.2 分布式控制框架
本文设计的分布式编队控制系统由参考控制器、通信链路、多旋翼个体三个部分组成;每个多旋翼个体由四旋翼系统与参考共识模块构成。其中参考控制器对整个编队系统起到引航的作用。对于本系统的虚拟领航者V-L,参考控制器根据任务给出的轨迹ξc生成期望距离ξcontr。ξj是与个体具备通信链路连接的其他相邻个体的位置信息,用于作为参考共识模块和参考控制器的反馈回路。参考共识模块用于判断队形组成是否完毕,给出多旋翼系统所需的飞行路径点。
任务管理系统不包含在分布式队形控制系统中,该系统按照任务需求规划编队队形与飞行路径,并根据各多旋翼个体的功能分别规划偏航角。
2.3 参考共识模块
图8 为相同坐标系下的位置计算图。
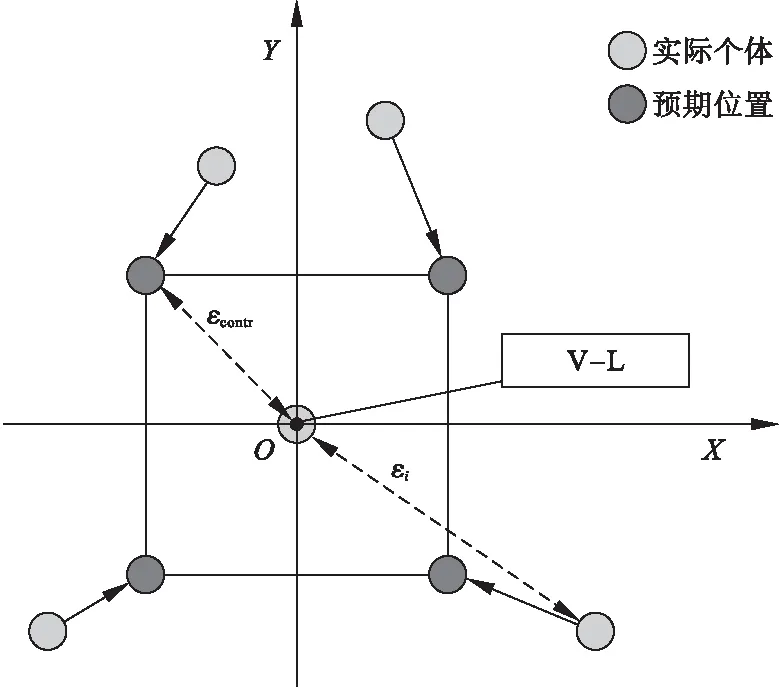
图8 相同坐标系下的位置计算
图8中,设定V-L作为预设队形的形心,并将其作为参考坐标系的原点。因此,预期的位置与形心间的距离为
ξcontr=[XC,YC,ZC]
(16)
式中XC、YC、ZC均为绝对值。第i个多旋翼与原点的距离为
ξi=[|Xi|,|Yi|,|Zi|],i=1,2,3,4
(17)
需要注意,为避免个体位置相近时飞往同一期望位置,可按标号规定Xi或Yi的正负。ξi值可认为是该多旋翼个体对参考坐标系的相对位置,在分布式控制中作为控制反馈,最终将ξi逐步引导至ξcontr,根据共识算法的概念,有
(18)
式(18)表示时间t与控制反馈ξi存在积分关系,系统由4个终端使用通信链路组成分布式结构,每个终端的分布式线性协议为
(19)
结合式(14),可将系统重写为
(20)
式中:σ(t)=[σ1(t),σ2(t),σ3(t),σ4(t)];L是拉普拉斯变换矩阵。结合式(19)和式(20),每个多旋翼都可获取本地可用的信息,并将自身信息提供给其邻居,提供方法为
(21)
2.4 参考控制器

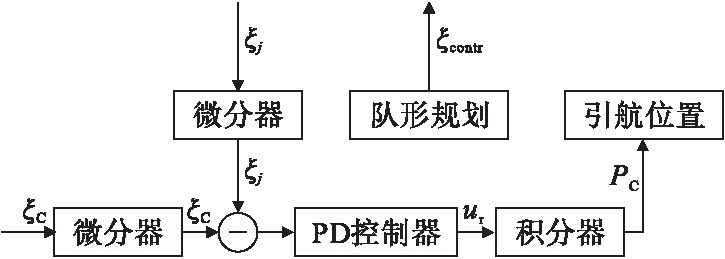
图9 参考控制器的框架
其中PD控制器算式为
(22)
3 实验结果
本文使用Matlab R2018b仿真平台对所设计的编队控制算法进行验证,以文献[12]所研究的控制算法与模型搭建多旋翼个体的Simulink仿真模型,并在该模型的基础上对参考共识模块与参考控制器进行仿真。为证明当通信链路不同时,无人机的编队控制效果相同,程序使用Matlab内置的函数erdosRenyi随机生成连通图,将其作为编队内部的通信链路关系,两次运行程序生成的连通图如图10所示。预设队形为图8所示的正方形,编队存在四架多旋翼个体,初始共识参考值为ξcontr=[1,1,0]。
在图10中,序号5为虚拟的V-L,参考控制器反馈位置ξj选取与V-L相连通的个体序号中最小的值。图10a中选取序号3的个体速度作为反馈,图10b则选取序号1的个体。
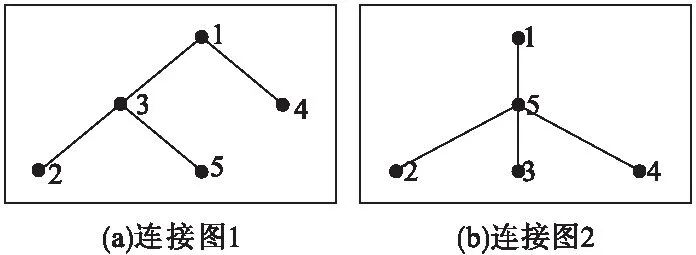
图10 两种不同的编队通信连接图
图11为队形变化前后的位置示意图,表明仅在执行队形规划时,无人机编队的队形保持效果。
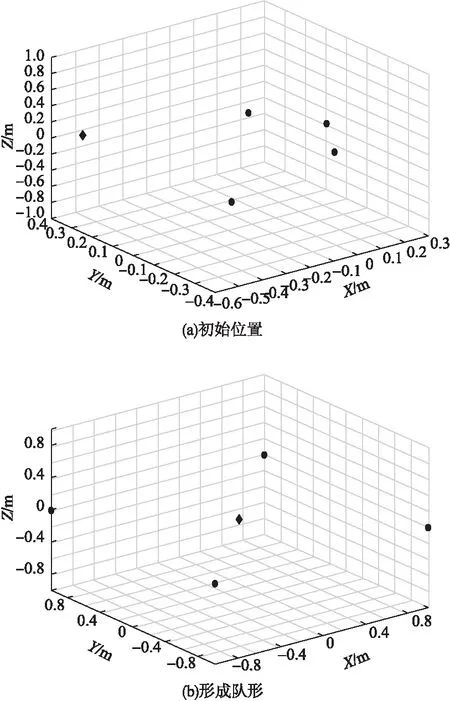
图11 队形保持效果
对多旋翼编队设定相同的初始位置,如图11a所示;运行程序两次的结果均与图11b相同。图中菱形代表虚拟领航者V-L的位置,其余点分别对应编队中实际存在的四个个体;两次运行中,各多旋翼均能准确地落位,最终形成正方形队形。图12为无人机编队按照所规划的队形,沿着期望轨迹实现编队飞行时,各无人机个体垂直方向的飞行轨迹。
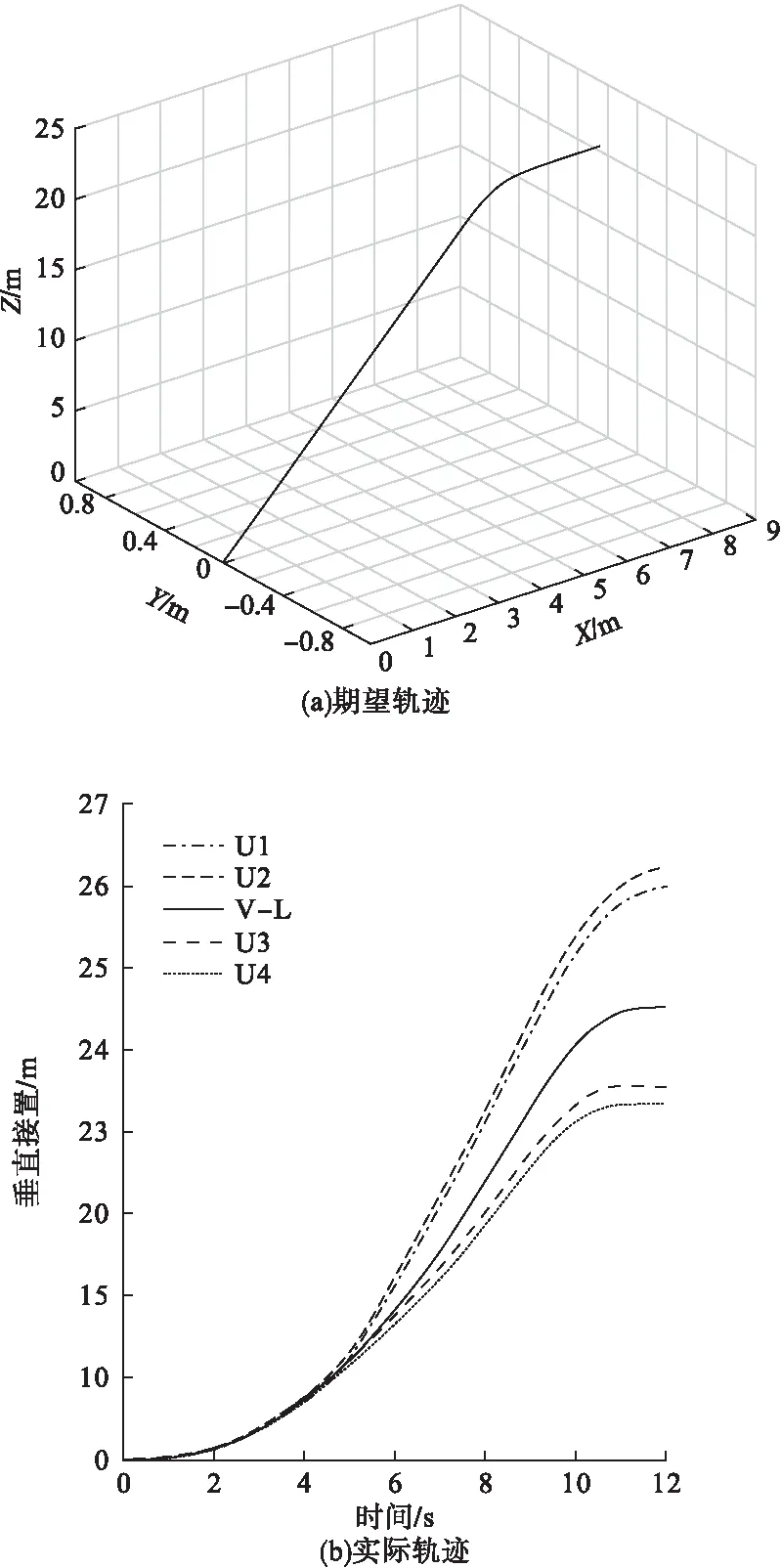
图12 飞行轨迹
图12中,实线表示V-L的轨迹。为模拟实际任务中可能存在的队形变换,在飞行4s后将XY水平方向的正方形队形调整为XZ方向,即共识参考值ξcontr由[1,1,0]转变为[1,0,1],用于测试编队控制的动态性能;最终于10s左右时,在飞行过程中形成设定队形。
图13为在飞行时进行队形动态调整的结果。在图13所示的三维图形中,其中实线表示虚拟领航者V-L的轨迹,即任务规划中的期望轨迹ξC;圆形点表示多旋翼中每个个体的实际位置。在图13a中的初始位置时,已经完成了队形调整;在图13b中,由于在飞行过程中进行了队形的动态调整,因此与预期队形稍有差异。结合图12的垂直位置数据,调整后的队形误差小于10%。
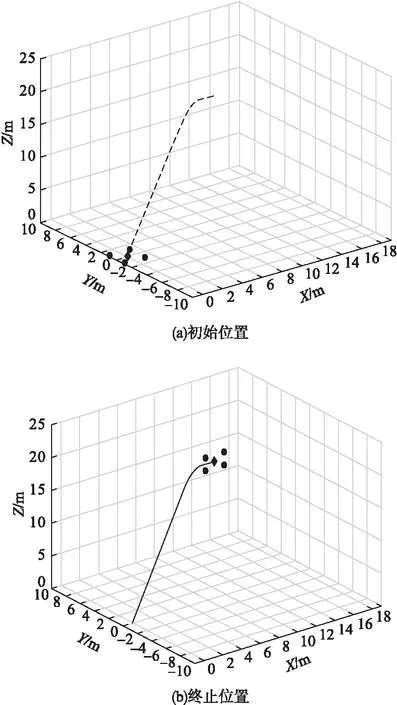
图13 飞行测试与动态调整
4 结论
结合领航者模型与分布式模型的优点,设计了基于相同坐标系的编队控制系统,应用参考共识算法进行分布式控制。分布式编队模型误差较大的原因源于实际环境中对坐标进行二次转换时引入了两次误差。
编队仿真实验结果表明,本文所设计的控制系统能够进行队形保持,同时能够实现飞行过程中队形重设与动态恢复,其误差小于10%,可以满足编队飞行的使用需求。
猜你喜欢
数字海洋与水下攻防(2022年4期)2022-09-01
北京航空航天大学学报(2021年9期)2021-11-02
兵器装备工程学报(2021年7期)2021-08-06
北京航空航天大学学报(2021年6期)2021-07-20
军民两用技术与产品(2021年9期)2021-03-09
科学导报·学术(2020年26期)2020-10-21
作文大王·低年级(2019年6期)2019-08-01
妇女(2018年7期)2018-09-19
中国广播(2017年9期)2017-09-30
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15
